【NR 定位】3GPP NR Positioning 5G定位标准解读(二)
目录
前言
2. UE定位方法的作用
3. 标准UE定位方法
3.1 引言
3.2 网络辅助的GNSS方法
3.3 OTDOA定位
3.4 增强小区ID方法
3.5 气压传感器定位
3.6 WLAN定位
3.7 蓝牙定位
3.8 TBS定位
3.9 运动传感器定位
3.10 NR增强小区ID方法
3.11 多RTT定位
3.12 DL-AoD定位
3.13 DL-TDOA定位
3.14 UL-TDOA定位
3.15 UL-AoA
3.16 SL定位和测距
3.16.1 侧链路往返时间定位(SL-RTT)
3.16.2 侧链路到达角(SL-AoA)
3.16.3 侧链路到达时间差(SL-TDOA)
3.16.4 侧链路到达时间(SL-TOA)
前言
3GPP NR Positioning 5G定位标准:3GPP TS 38.305 V18
3GPP 标准网址:Directory Listing /ftp/
【NR 定位】3GPP NR Positioning 5G定位标准解读(一)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(二)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(三)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(四)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(五)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(六)-CSDN博客
2. UE定位方法的作用
NG-RAN可以利用一种或多种定位方法来确定UE的位置。
UE的定位包括两个主要步骤:
- 信号测量;
- 基于测量的位置估计和可选的速度计算。
信号测量可以由UE或由服务的ng-eNB或gNB进行。对于地面定位方法,所测量的基本信号通常是LTE或NR无线传输;然而,其他方法可以利用其他传输,例如通用无线电导航信号,包括来自全球导航卫星系统(GNSS)的信号。
定位功能不应局限于单一的方法或测量。也就是说,它应该能够利用其他标准的方法和测量,只要这些方法和测量是可用的和适当的,以满足位置服务客户端所需的服务需求。这些附加信息可以包括容易获得的E-UTRAN或NG-RAN测量。
位置估计计算可以由UE或由LMF进行。
当UE在NG-RAN覆盖范围内或外时,使用sidelink的UE定位方法可以用于获取绝对位置、相对位置或测距信息。
3. 标准UE定位方法
3.1 引言
对于NG-RAN接入所支持的标准定位方法包括:
- 网络辅助的GNSS方法;
- 基于LTE信号的观测到达时间差(OTDOA)定位;
- 基于LTE信号的增强小区ID方法;
- WLAN定位;
- 蓝牙定位;
- 地面信标系统(TBS)定位;
- 基于传感器的方法:
- 气压传感器;
- 运动传感器。
- 基于NR信号的NR增强小区ID方法(NR E-CID);
- 基于NR信号的多往返时间定位(Multi-RTT);
- 基于NR信号的下行链路出发角(DL-AoD);
- 基于NR信号的下行链路到达时间差(DL-TDOA);
- 基于NR信号的上行链路到达时间差(UL-TDOA);
- 基于NR信号的上行链路到达角(UL-AoA),包括A-AoA和Z-AoA;
- 基于侧链路信号的SL定位和测距,包括:
- 侧链路往返时间定位(SL-RTT);
- 侧链路到达角。
这些方法为UE(用户设备)提供了多种定位选择,可以根据不同的环境和需求选择最适合的定位技术。例如,GNSS方法依赖于全球导航卫星系统,如GPS或GLONASS,适用于开阔环境;而OTDOA和增强小区ID方法则主要依赖于地面网络设施,适用于城市或其他复杂环境。WLAN和蓝牙定位通常用于室内环境,而TBS则可能用于特定的地理区域或事件。传感器方法,如气压传感器和运动传感器,可以提供额外的辅助信息以提高定位精度。
对于基于NR(新无线电)信号的方法,如NR E-CID、Multi-RTT、DL-AoD、DL-TDOA、UL-TDOA和UL-AoA,它们利用5G网络的新特性和信号处理技术来提高定位精度和可靠性。这些技术特别适用于5G网络覆盖的区域,并且可以提供更快的定位和更精确的位置信息。
SL(侧链路)定位和测距方法利用设备之间的直接通信,无需通过基站,这对于在密集的城市环境中实现高精度定位特别有用。SL-RTT和SL-AoA是两种基于侧链路信号的定位技术,它们分别通过测量信号往返时间和到达角来确定设备之间的相对位置。
总的来说,这些标准UE定位方法提供了多样化的定位手段,以满足不同场景和应用的需求。在实际应用中,可以根据具体环境和条件选择最适合的定位技术组合,以实现最佳的定位性能和精度。
Table 4.3.1-1: Supported versions of UE positioning methods
| Method | UE-based | UE-assisted, LMF-based | NG-RAN node assisted | SUPL Note 8 |
| A-GNSS | Yes | Yes | No | Yes |
| OTDOA Note1, Note 2 | No | Yes | No | Yes |
| E-CID Note 4, Note 7 | No | Yes | Yes | Yes for E-UTRA |
| Sensor | Yes | Yes | No | No |
| WLAN | Yes | Yes | No | Yes |
| Bluetooth | No | Yes | No | No |
| TBS Note 5 | Yes | Yes | No | Yes (MBS) |
| DL-TDOA | Yes | Yes | No | Yes |
| DL-AoD | Yes | Yes | No | Yes |
| Multi-RTT | No | Yes | Yes | Yes |
| NR E-CID | No | Yes | Yes | Yes (DL NR E-CID) |
| UL-TDOA | No | No | Yes | Yes |
| UL-AoA | No | No | Yes | Yes |
| NOTE 1: This includes TBS positioning based on PRS signals. NOTE 2: In this version of the specification only OTDOA based on LTE signals is supported. NOTE 3: Void NOTE 4: This includes Cell-ID for NR method when UE is served by gNB. NOTE 5: In this version of the specification only for TBS positioning based on MBS signals. NOTE 6: Void NOTE 7: Enhanced Cell ID based on LTE signals. NOTE 8: This shows whether the positioning method is supported by SUPL ULP [16]. | ||||
如相应条款所述,基于MBS信号的传感器、WLAN、蓝牙和TBS定位方法也支持独立模式。
SL定位和测距方法可以支持SL目标UE基础或SL目标UE辅助/服务器基础模式,其中“服务器”可以是SL服务器UE或LMF。表4.3.1-2指示了本规范的这一版本支持SL定位和测距方法的哪些版本。
Table 4.3.1-2: Supported versions of SL positioning and ranging methods.
| Method | SL-Target UE-based | SL-Target UE-assisted, server-based |
| SL-RTTNOTE 1 | Yes | Yes |
| SL-AoANOTE 2 | Yes | Yes |
| SL-TDOA | Yes | Yes |
| SL-TOA | Yes | Yes |
| NOTE 1: The SL-RTT method may also be used for ranging between UEs. NOTE 2: The SL-AoA method may also be used to obtain direction between UEs. | ||
3.2 网络辅助的GNSS方法
这些方法利用配备了能够接收GNSS信号的无线电接收器的UE。在3GPP规范中,GNSS一词既包含全球性的也包含区域性的/增强型导航卫星系统。
全球导航卫星系统的例子包括GPS、现代化GPS、伽利略、GLONASS和北斗导航卫星系统(BDS)。区域性导航卫星系统包括准天顶卫星系统(QZSS)和印度星座导航系统(NavIC),而许多增强系统(列在8.1.1中)则归类为空间增强系统(SBAS),并提供区域性增强服务。
在这个概念中,不同的GNSS(如GPS、伽利略等)可以单独使用或组合使用来确定UE的位置。
3.3 OTDOA定位
OTDOA定位方法利用UE从多个TP(包括eNBs、ng-eNBs和仅PRS TPs)接收到的下行信号的测量时间。UE使用从定位服务器接收的辅助数据来测量接收信号的时间,并使用得到的测量结果来确定UE相对于邻近TP的位置。
3.4 增强小区ID方法
在小区ID(CID)定位方法中,UE的位置是通过知道其服务的ng-eNB、gNB和小区来估计的。关于服务的ng-eNB、gNB和小区的信息可以通过寻呼、注册或其他方法获得。
基于LTE信号的增强小区ID(E-CID)定位是指使用额外的UE测量和/或NG-RAN无线资源以及其他测量来改善UE位置估计的技术。在服务ng-eNB的情况下,可以基于NR、GERAN、UTRA或WLAN信号支持上行E-CID。
尽管基于LTE信号的E-CID定位可以利用与RRC协议中的测量控制系统相同的一些测量,但UE通常不需要为了定位而进行额外的测量;即,定位程序不提供测量配置或测量控制消息,UE报告其可用的测量值,而不是被要求进行额外的测量操作。
在需要对UE和ng-eNB测量进行紧密时间耦合的情况下(例如,TADV类型1和UE E-UTRA Rx-Tx时间差),ng-eNB配置适当的RRC测量,并负责保持测量之间的所需耦合。
3.5 气压传感器定位
气压传感器方法利用气压传感器来确定UE位置的垂直分量。UE测量气压,可选地辅以辅助数据,以计算其位置的垂直分量或将测量值发送到定位服务器以进行位置计算。
此方法应与其他定位方法结合使用,以确定UE的3D位置。
3.6 WLAN定位
WLAN定位方法利用WLAN测量(AP标识符和可选的其他测量)和数据库来确定UE的位置。UE测量从WLAN [21]接入点接收到的信号,可选地辅以辅助数据,将测量值发送到定位服务器以进行位置计算。使用测量结果和参考数据库,计算UE的位置。
或者,UE利用WLAN测量和可选的由定位服务器提供的WLAN AP辅助数据,来确定其位置。
3.7 蓝牙定位
蓝牙定位方法利用蓝牙来确定UE的位置。支持三种模式:
- UE测量从与信标标识符相关联的蓝牙[22]信标接收到的信号,
- UE发送蓝牙连续音调扩展(CTE)信号,以使蓝牙信标能够估计来自UE的AoA [51],
- UE基于来自定位服务器的关于蓝牙信标天线配置的辅助数据,估计来自蓝牙信标的AoD [51]。
使用测量结果和参考数据库,计算UE的位置。蓝牙方法可以与其他定位方法(例如WLAN)结合使用,以提高UE的定位精度。
3.8 TBS定位
地面信标系统(TBS)由地面发射机网络组成,仅广播用于定位的信号。当前类型的TBS定位信号是MBS(大都市信标系统)信号[23]和定位参考信号(PRS)(TS 36.211 [24])。UE测量接收到的TBS信号,可选择性地利用辅助数据来计算其位置或将测量值发送到定位服务器以进行位置计算。
3.9 运动传感器定位
运动传感器方法利用各种传感器,如加速度计、陀螺仪、磁力计等,来计算UE的位移。UE基于参考位置和/或参考时间估计相对位移。UE发送包含确定的相对位移的报告,该报告可用于确定绝对位置。
此方法应与其他定位方法一起用于混合定位。
3.10 NR增强小区ID方法
NR增强小区ID(NR E CID)定位是指使用额外的UE测量和/或gNB测量来改进UE位置估计的技术。
尽管NR E-CID定位可以利用与RRC协议中的测量控制系统相同的某些测量值,但通常不期望UE仅为定位目的而进行额外的测量;即,定位程序不提供测量配置或测量控制消息,并且UE报告其可用的测量值,而不是被要求进行额外的测量操作。
3.11 多RTT定位
多RTT定位方法利用UE Rx-Tx时间差测量值(以及可选的DL-PRS-RSRP和/或DL-PRS-RSRPP和/或DL-RSCP)对从多个TRP接收的下行链路信号进行测量,以及gNB Rx-Tx时间差测量值(以及可选的UL-SRS-RSRP和/或UL-SRS-RSRPP和/或UL-RSCP)对从UE传输的多个TRP的上行链路信号进行测量。
UE使用从定位服务器接收的辅助数据测量UE Rx-Tx时间差测量值(以及可选的接收信号的DL-PRS-RSRP和/或DL-PRS-RSRPP和/或DL-RSCP),而TRP使用从定位服务器接收的辅助数据测量gNB Rx-Tx时间差测量值(以及可选的接收信号的UL-SRS-RSRP和/或UL-SRS-RSRPP和/或UL-RSCP)。这些测量值用于确定定位服务器上的RTT,该RTT用于估计UE的位置。
对于NTN中的UE位置网络验证,多RTT定位方法利用UE Rx-Tx时间差测量值(以及可选的DL-PRS-RSRP和/或DL-PRS-RSRPP)对在不同时间实例从单个TRP接收的下行链路信号进行测量,以及gNB Rx-Tx时间差测量值(以及可选的UL-SRS-RSRP和/或UL-SRS-RSRPP)对在不同时间实例从UE传输的单个TRP的上行链路信号进行测量。与每个UE Rx-Tx时间差测量值一起,UE还报告以子帧为单位的UE Rx-Tx时间差子帧偏移测量值以及TS 38.215 [37]中定义的UE和卫星之间的服务链路上的多普勒引起的DL定时漂移。
3.12 DL-AoD定位
DL-AoD定位方法利用在UE处从多个TP接收的下行链路信号的测量DL-PRS-RSRP(以及可选的DL-PRS-RSRPP)。UE使用从定位服务器接收的辅助数据测量接收信号的DL-PRS-RSRP(以及可选的DL-PRS-RSRPP),并将得到的测量值与其他配置信息一起使用,以确定UE相对于邻近TP的位置。
3.13 DL-TDOA定位
DL-TDOA定位方法利用在UE处从多个TP接收的下行链路信号的DL RSTD(以及可选的DL-PRS-RSRP和/或DL-PRS-RSRPP和/或DL-RSCPD)。UE使用从定位服务器接收的辅助数据测量接收信号的DL RSTD(以及可选的DL-PRS-RSRP和/或DL-PRS-RSRPP和/或DL-RSCPD),并将得到的测量值与其他配置信息一起使用,以确定UE相对于邻近TP的位置。
3.14 UL-TDOA定位
UL-TDOA定位方法利用了从用户设备发送的上行链路信号在多个接收点上的UL-RTOA(以及可选的UL-SRS-RSRP和/或UL-SRS-RSRPP和/或UL-RSCP)。接收点使用从定位服务器接收的辅助数据来测量接收信号的UL-RTOA(以及可选的UL-SRS-RSRP和/或UL-SRS-RSRPP和/或UL-RSCP),然后将得到的测量值与其他配置信息一起用于估计用户设备的位置。
3.15 UL-AoA
UL-AoA定位方法利用了从用户设备发送的上行链路信号在多个接收点上的测量到达方位角(A-AoA)和/或到达顶角(Z-AoA)。接收点使用从定位服务器接收的辅助数据来测量接收信号的A-AoA和Z-AoA(以及可选的UL-SRS-RSRP和/或UL-SRS-RSRPP),然后将得到的测量值与其他配置信息一起用于估计用户设备的位置。
注:这里的UL-RTOA、UL-SRS-RSRP、UL-SRS-RSRPP、UL-RSCP、A-AoA和Z-AoA等术语都是移动通信中用于定位的专业术语,它们分别代表了上行链路相对时间到达、上行链路探测参考信号参考信号接收功率、上行链路探测参考信号参考信号接收功率每资源块、上行链路接收信号码功率、到达方位角和到达顶角等参数。这些参数在定位过程中被测量并用于计算用户设备的位置。
3.16 SL定位和测距
3.16.1 侧链路往返时间定位(SL-RTT)
SL-RTT定位方法利用了从一个或多个对等UE(例如,锚点UE)接收到的侧链路信号在目标UE处的SL Rx-Tx时间差测量值(以及可选的SL-PRS-RSRP和/或SL-PRS-RSRPP),以及由目标UE发送的侧链路信号在一个或多个对等UE(例如,锚点UE)处执行的SL Rx-Tx时间差测量值(以及可选的SL-PRS-RSRP和/或SL-PRS-RSRPP)。一对UE执行的SL Rx-Tx时间差测量允许确定这对UE之间的距离/范围。目标UE与多个对等UE之间的距离/范围测量值可用于确定目标UE相对于对等UE(例如,锚点UE)的位置。
3.16.2 侧链路到达角(SL-AoA)
SL-AoA定位方法利用了从一个或多个对等UE(例如,锚点UE)接收到的侧链路信号在目标UE处的SL到达角测量值(以及可选的SL-PRS-RSRP和/或SL-PRS-RSRPP),或由目标UE发送的侧链路信号在一个或多个对等UE(例如,锚点UE)处执行的SL到达角测量值(以及可选的SL-PRS-RSRP和/或SL-PRS-RSRPP)。由UE对由对等UE发送的侧链路信号执行的SL到达角测量确定了这对UE之间相对于参考方向(例如,地理北方)的方位角和垂直角(即方向)。目标UE与多个对等UE之间的方向测量值可用于确定目标UE相对于对等UE(例如,锚点UE)的位置。
3.16.3 侧链路到达时间差(SL-TDOA)
SL-TDOA定位方法利用了从两个或多个对等UE(例如,锚点UE)接收到的侧链路信号在目标UE处的SL-RSTD(以及可选的SL-PRS-RSRP和/或SL-PRS-RSRPP)。目标UE测量由两个或多个对等UE发送的接收到的侧链路信号的SL-RSTD(以及可选的SL-PRS-RSRP和/或SL-PRS-RSRPP)。目标UE与多个对等UE之间的SL-RSTD测量值可用于确定目标UE相对于对等UE(例如,锚点UE)的位置。
3.16.4 侧链路到达时间(SL-TOA)
SL-TOA定位方法利用了由目标UE发送并由多个每UE(例如,锚点UE)接收的侧链路信号的SL-RTOA(以及可选的SL-PRS-RSRP和/或SL-PRS-RSRPP)。对等UE测量由目标UE发送的侧链路信号的SL-RTOA(以及可选的SL-PRS-RSRP和/或SL-PRS-RSRPP)。在多个对等UE处执行的SL-RTOA测量值可用于确定目标UE相对于对等UE(例如,锚点UE)的位置。
下一篇文章我们将重点介绍一下5G NR定位的网络架构设计。
相关文章:
)
【NR 定位】3GPP NR Positioning 5G定位标准解读(二)
目录 前言 2. UE定位方法的作用 3. 标准UE定位方法 3.1 引言 3.2 网络辅助的GNSS方法 3.3 OTDOA定位 3.4 增强小区ID方法 3.5 气压传感器定位 3.6 WLAN定位 3.7 蓝牙定位 3.8 TBS定位 3.9 运动传感器定位 3.10 NR增强小区ID方法 3.11 多RTT定位 3.12 DL-AoD定位…...

为何代理IP的稳定性不如有线IP?
代理IP与网线IP的稳定性之间存在差异的原因在于它们的工作机制和服务环境的不同。以下是代理IP不如网线IP稳定的一些主要原因: 1. 服务提供商的质量: - 动态分配:代理IP通常是动态分配的,这意味着每次请求或每隔一段时间ÿ…...
【c++】 string类的模拟实现
1.浅拷贝 浅拷贝:也称位拷贝,编译器只是将对象中的值拷贝过来。如果对象中管理资源,最后就会导致多个对象共享同一份资源,当一个对象销毁时就会将该资源释放掉,而此时另一些对象不知道该资源已经被释放,以…...
transformer--transformer模型构建和测试
前面几节进行了各种组件的学习和编码,本节将组件组成transformer,并对其进行测试 EncoderDecoder 编码器解码器构建 使用EnconderDecoder实现编码器-解码器结构 # 使用EncoderDeconder类实现编码器和解码器class EncoderDecoder(nn.Module):def __ini…...

从0到1全流程使用 segment-anything
从0到1全流程使用 segment-anything 一、安装 anaconda 一、下载 anaconda 二、以管理员身份运行安装 1、勾选 Just Me 2、统一安装路径(后续 python 等包也安装至此目录) 3、勾选 add to path 然后安装即可。 三、修改 Anaconda 默认路径及默认缓存路径 Anaconda 默认下…...
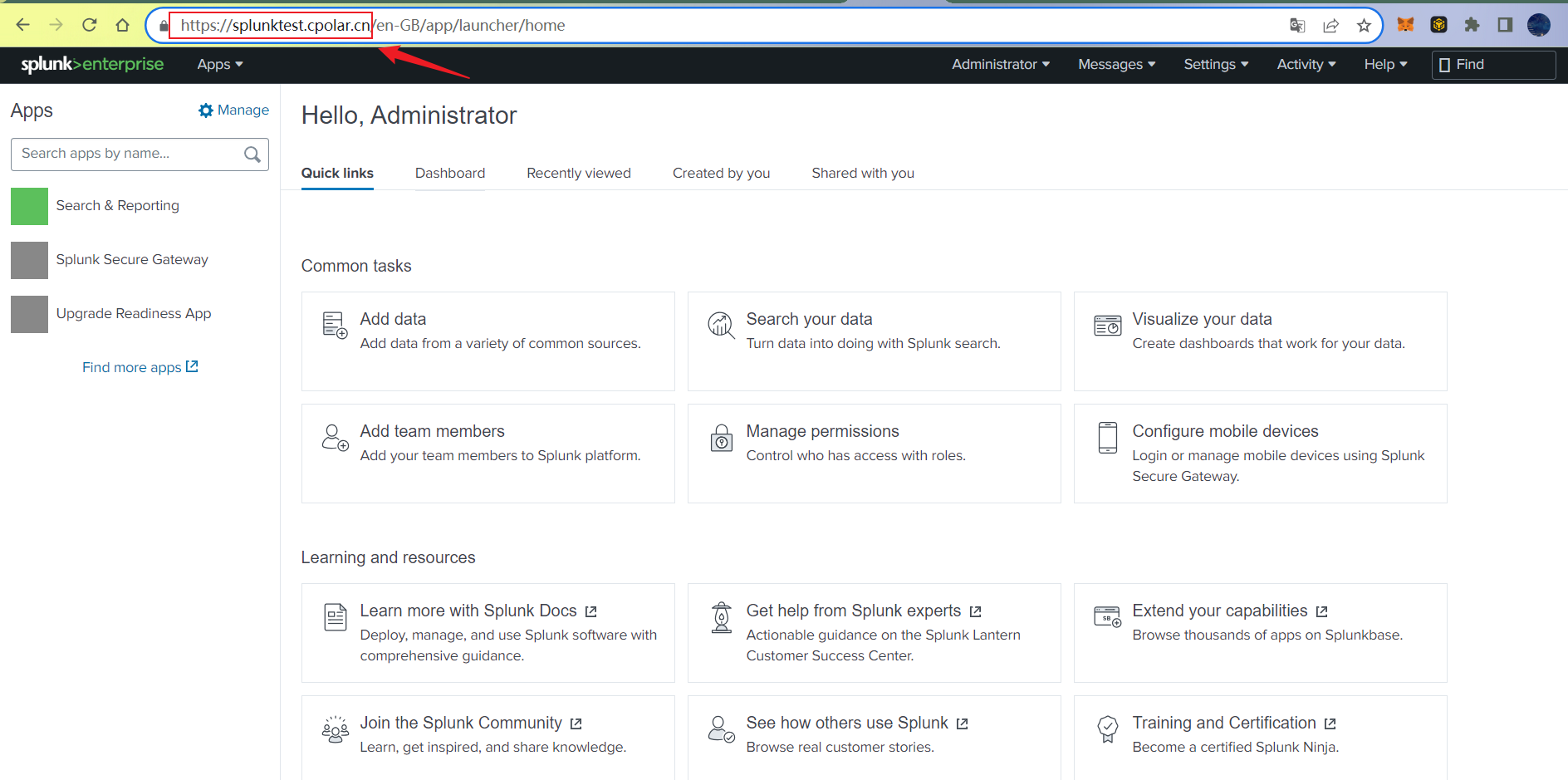
Window系统部署Splunk Enterprise并结合内网穿透实现远程访问本地服务
文章目录 前言1. 搭建Splunk Enterprise2. windows 安装 cpolar3. 创建Splunk Enterprise公网访问地址4. 远程访问Splunk Enterprise服务5. 固定远程地址 前言 本文主要介绍如何简单几步,结合cpolar内网穿透工具实现随时随地在任意浏览器,远程访问在本地…...
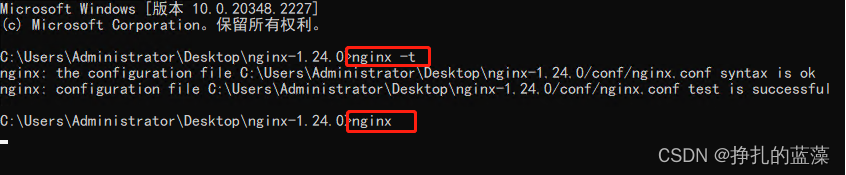
Windows服务器:通过nginx反向代理配置HTTPS、安装SSL证书
先看下效果: 原来的是 http,配置好后 https 也能用了,并且显示为安全链接。 首先需要 SSL证书 。 SSL 证书是跟域名绑定的,还有有效期。 windows 下双击可以查看相关信息。 下载的证书是分 Apache、IIS、Tomcat 和 Nginx 的。 我…...

LeetCode67 二进制求和
题目 给你两个二进制字符串 a 和 b ,以二进制字符串的形式返回它们的和。 示例 示例 1:输入:a "11", b "1" 输出:"100" 示例 2:输入:a "1010", b "1011" 输出&…...

python | 列表,元组,字符串,集合,字典
列表: 可以容纳任意数目不同类型的元素(支持我们学过的任意数据类型)元素之间有先后顺序用中括号包裹,每个元素用逗号隔开 例如: students [林黛玉,薛宝钗,贾元春,贾探春,史湘云,妙玉,贾迎春,贾惜春,王熙凤,贾巧姐…...
稀疏图带负边的全源最短路Johnson算法
BellmanFord算法 Johnson算法解决的问题 带负权的稀疏图的全源最短路 算法流程 重新设置的每条边的权重都大于或等于0,跑完Djikstra后得到的全源最短路,记得要还原,即:f(u,v) d(u,v) - h[u] h[v] 例题...

oracle基础体系
一、 Oracle数据库服务器 数据库在各个行业都会有使用到;其实,我们平时无论是在与客户沟通或者交流中,所说的Oracle数据库是指Oracle数据库服务器(Oracle Server),它由Oracle实例(Oracle Instan…...

k8s运维问题整理
1.宕机或异常重启导致etcd启动失败 服务器非正常关机(意外掉电、强制拔电)后 etcd 数据损坏。 查看apiserver日志发现出现报错Error while dialing dial tcp 127.0.0.1:2379: connect: connection refused,2379是etcd的端口,那么a…...
设计模式分类和六大设计原则)
设计模式(一)设计模式分类和六大设计原则
0.设计模式的分类 GoF提出的设计模式总共有23种,根据目的准则分类分为三大类: 创建型模式,共五种:单例模式、工厂方法模式、抽象工厂模式、建造者模式、原型模式。 结构型模式,共七种:适配器模式、装饰模式…...

git的学习与使用(笔记最全)
什么是git Git是一种分布式版本控制系统,每个开发者都可以在自己的机器上拥有一个完整的仓库 特点 断网也可以工作:没网的情况下,不会影响工作。对于未提交到远程库的代码可以随时撤销。可以查看历史提交记录,以及文件内容的修改记…...

windows环境下Grafana+loki+promtail入门级部署日志系统,收集Springboot(Slf4j+logback)项目日志
🌹作者主页:青花锁 🌹简介:Java领域优质创作者🏆、Java微服务架构公号作者😄 🌹简历模板、学习资料、面试题库、技术互助 🌹文末获取联系方式 📝 往期热门专栏回顾 专栏…...

学习python时一些笔记
1、winr 命令提示符的快捷键 输入cmd进入终端 2、在终端运行桌面上的python文件 cd desktop(桌面) cd是进入该文件夹的意思。 cd .. 回到上一级 运行python时一定要找到文件的所在地 输入python进入,exit()退出%s字符串占位符%d数字占位符%f浮点数占位符input输…...
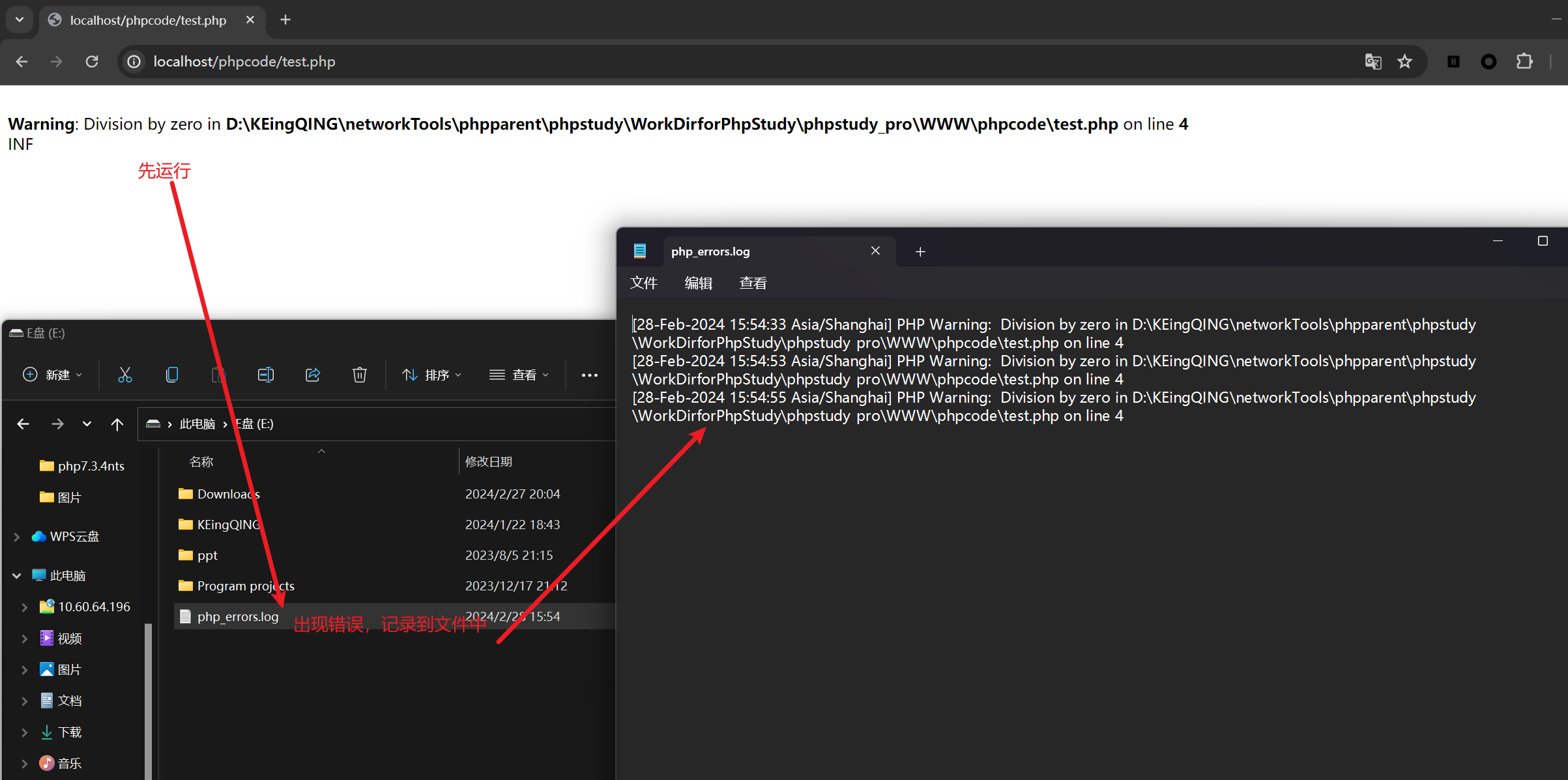
php基础学习之错误处理(其二)
在实际应用中,开发者当然不希望把自己开发的程序的错误暴露给用户,一方面会动摇客户对己方的信心,另一方面容易被攻击者抓住漏洞实施攻击,同时开发者本身需要及时收集错误,因此需要合理的设置错误显示与记录错误日志 一…...

云计算 2月28号 (linux的磁盘分区)
一 存储管理 主要知识点: 基本分区、逻辑卷LVM、EXT3/4/XFS文件系统、RAID 初识硬盘 机械 HDD 固态 SSD SSD的优势 SSD采用电子存储介质进行数据存储和读取的一种技术,拥有极高的存储性能,被认为是存储技术发展的未来新星。 与传统硬盘相比,…...
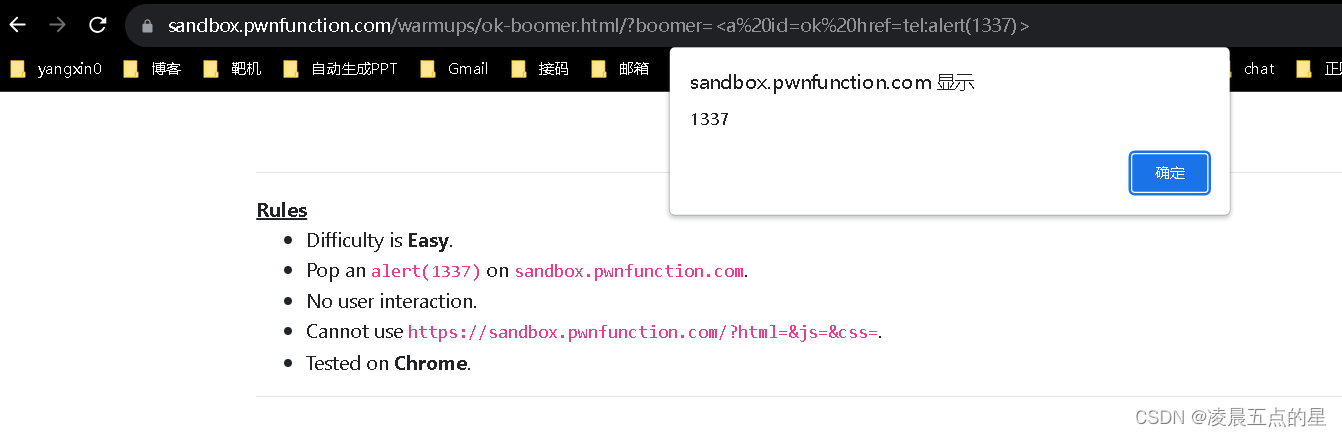
demo型xss初级靶场
一、环境 XSS Game - Ma Spaghet! | PwnFunction 二、开始闯关 第一关 看看代码 试一下直接写 明显进来了为什么不执行看看官方文档吧 你不执行那我就更改单标签去使用呗 ?somebody<img%20src1%20onerror"alert(1)"> 防御: innerText 第二关…...
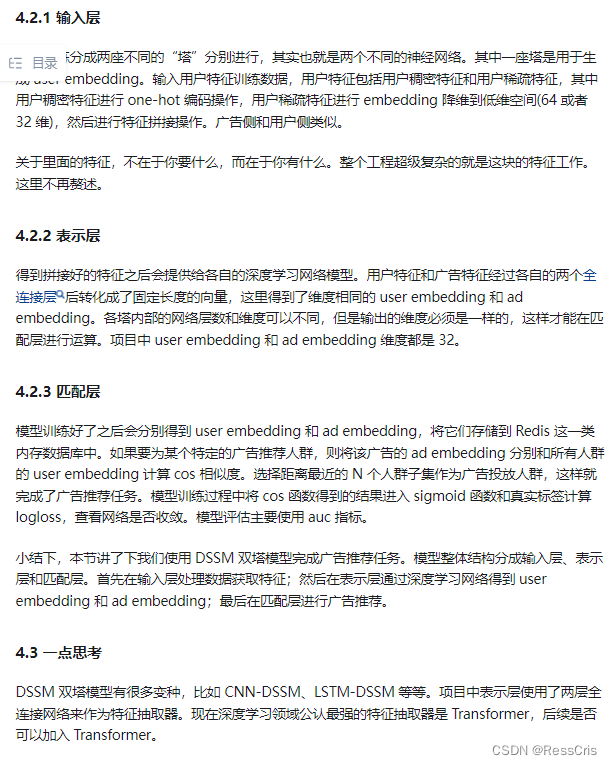
【推荐算法系列十八】:DSSM 召回算法
参考 推荐系统中 DSSM 双塔模型汇总(二更) DSSM 和 YouTubeDNN 都是比较经典的 U2I 模型。 U2I 召回 U2I 召回也就是 User-to-Item 召回,它基于用户的历史行为以及用户的一些个人信息,对系统中的候选物品进行筛选,挑…...

电机正反转深度解析
电机正反转本质:通过改变内部磁场或电枢电流方向,实现顺时针/逆时针旋转,是设备控制核心功能! 📌核心原理(文字速记,新手好记): ① 三相异步电机(最常用):反转可通过任意…...
附完整 Python 代码)
【QMT 量化实战】股市 “高开低走“ 是陷阱还是机会?(下)附完整 Python 代码
摘要 本文为《股市 "高开低走" 是陷阱还是机会?》系列下篇,提供基于QMT 量化交易平台的完整 "高开低走" 策略 Python 实现代码。包含 Xtquant 初始化、全局参数配置、数据获取、趋势判断、周期计算及结果输出等全流程代码ÿ…...

5分钟完成Windows 11终极优化:开源神器Win11Debloat完全指南
5分钟完成Windows 11终极优化:开源神器Win11Debloat完全指南 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declutter …...

充电桩行业转型:从规模竞争到质量竞争,CCC认证锚定新赛道
过去五年,中国充电桩行业的核心叙事只有一个字:铺。谁能更快拿点位,谁能更快建站,谁能更快完成城市、县域、高速、社区的覆盖,谁就有资格坐上牌桌。功率数字不断攀升,铺设数量不断刷新,市场份额…...

测试工程师用 Claude :它修得了选择器,修不了你的需求理解
测试架构这行有个一直没解决的尴尬:开发一周能写完的功能,QA 写测试要追两周。 你越想把覆盖率补齐,这个口子张得越大。 所以当 Claude Code 加上 Playwright 这套东西开始能"自己写测试"的时候, QA 圈子是真的盯着看。但我想先泼一句:它确实改变了一些事, 但改变的…...

UserLAnd安卓Linux容器:如何在手机上运行完整Linux系统的终极指南
UserLAnd安卓Linux容器:如何在手机上运行完整Linux系统的终极指南 【免费下载链接】UserLAnd Main UserLAnd Repository 项目地址: https://gitcode.com/gh_mirrors/us/UserLAnd UserLAnd是一款革命性的安卓应用,让用户无需root权限即可在移动设备…...

Claude处理1000+页合同文档的7步标准化流程:从乱码识别到条款抽取全链路实操
更多请点击: https://kaifayun.com 第一章:Claude处理1000页合同文档的7步标准化流程总览 面对动辄上千页的复杂商业合同(如并购协议、跨境服务主协议、多层分包合同包),人工审阅极易遗漏关键条款、时效性差且难以复现…...

别再手动刷新了!用HomePage v0.8.2+Docker Compose,一键监控所有容器和网站状态
别再手动刷新了!用HomePage v0.8.2Docker Compose,一键监控所有容器和网站状态 每次登录服务器都要挨个检查容器是否运行正常?网站挂了却要等用户反馈才知道?这种被动式运维早该淘汰了。今天介绍的这套方案,能让你的H…...

内存计算技术如何优化基因组分析性能与能效
1. 内存计算技术如何重塑基因组分析格局在生物信息学领域,我们正面临着一个关键矛盾:一方面,随着测序技术的进步,基因组数据正以每年翻倍的速度增长;另一方面,传统计算架构的能效瓶颈日益凸显。我曾参与过一…...

【SpringBoot 3.x 第202节】微服务拆分方法论:什么时候该拆,什么时候不该拆?
🏆本文收录于《滚雪球学SpringBoot 3.x》,专门攻坚指数提升,本年度国内最系统最专业最详细(永久更新)。 该专栏致力打造最硬核 SpringBoot3 从零基础到进阶系列学习内容,🚀均为全网独家首发…...