RK DVP NVP6158配置 学习
NVP6158简介
NVP6158C是一款4通道通用RX,提供高质量图像的芯片。它接受来自摄像机和其他视频信号的独立4通道通用输入来源。它将4通道通用1M至8M 7.5P视频格式数字化并解码为代表8位ITU-R BT.656/1120 4:2:2格式的数字分量视频,并将单独的BT.601格式与27/36/37.125MHz同步,54/72/74.25MHz和108/144/148.5/297MHz多路复用。54/72/74.25/108/144/148.5/297MHz复用功能可用,因为它在时钟范围内锁相环NVP6158C包括4通道模拟处理电路,包括抗混叠滤波器、ADC、钳位和均衡器滤波器。采用自适应高性能梳状滤波器和垂直峰值滤波器,获得了最佳的图像质量。它还支持可编程的饱和度、色调、亮度、对比度以及CTI、可编程峰值滤波器和各种补偿滤波器等多种功能。
RK DVP简介:

DVP(Digital Video Port) 是传统的sensor输出接口,采用并行输出方式,d数据位宽有8bit、10bit、12bit、16bit,是CMOS电平信号(重点是非差分信号),PCLK最大速率为96MHz,接口如下图:
PCLK:pixel clock ,像素时钟,每个时钟对应一个像素数据;
HSYNC:horizonal synchronization,行同步信号
VSYNC:vertical synchronization,帧同步信号;
DATA:像素数据,视频数据,具体位宽要看ISP是否支持;
XCLK:或者MCLK,ISP芯片输出给驱动sensor的时钟;
SCL,SDA:IIC用来读写sensor的寄存器,配置sensor。
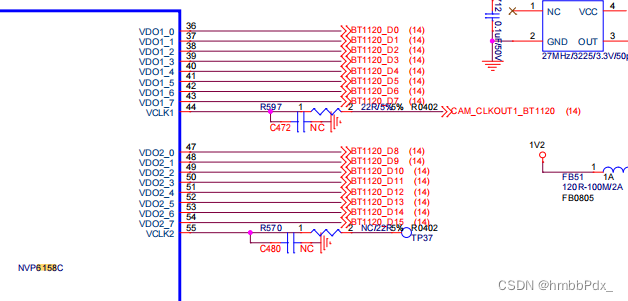
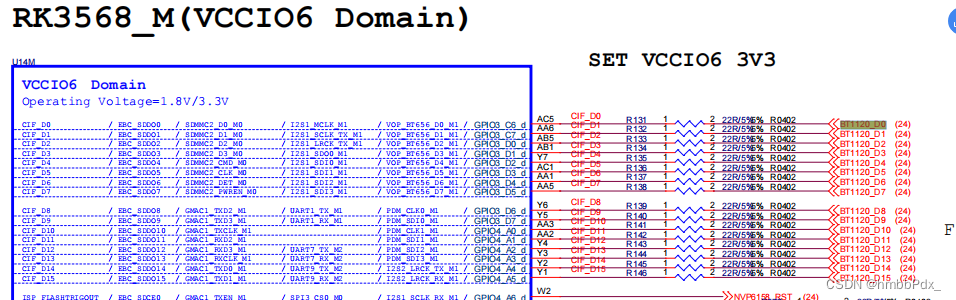
NVP6158 与 RK3568 DVP连接相关原理图:
 设备树配置:
设备树配置:
&rkcif { status = "okay"; memory-region = <&cif_reserved>; };
&rkcif_dvp { status = "okay"; ports { #address-cells = <1>; #size-cells = <0>;port@0 { #address-cells = <1>; #size-cells = <0>; /* Parallel bus endpoint */ dvp_in_bcam1: endpoint@1 { reg = <1>; remote-endpoint = <&nvp6158_out>; bus-width = <16>; }; }; };
};
nvp6158: nvp6158@30 { compatible = "nvp6158-v4l2"; status = "okay";reg = <0x30>; clocks = <&cru CLK_CIF_OUT>; clock-names = "xvclk"; power-domains = <&power RK3568_PD_VI>; pinctrl-names = "default"; pinctrl-0 = <&cif_clk &cif_dvp_clk &cif_dvp_bus16>; //pinctrl-0 = <&cif_dvp_clk &cif_dvp_bus8 &cif_dvp_bus16>;pwr-gpios = <&gpio0 RK_PC4 GPIO_ACTIVE_HIGH>; //pwr2-gpios = <&gpio4 RK_PC7 GPIO_ACTIVE_HIGH>;/* 360 camera */ rst-gpios = <&gpio4 RK_PA6 GPIO_ACTIVE_HIGH>; /*rst2-gpios = <&gpio2 RK_PC5 GPIO_ACTIVE_HIGH>;*/ /*pwdn-gpios = <&gpio4 RK_PA6 GPIO_ACTIVE_HIGH>;*/ /*pwdn2-gpios = <&gpio4 RK_PA6 GPIO_ACTIVE_HIGH>;*/ rockchip,camera-module-index = <0>; rockchip,camera-module-facing = "back"; rockchip,camera-module-name = "default"; rockchip,camera-module-lens-name = "default"; rockchip,dvp_mode = "BT1120"; //BT656 or BT1120 or BT656_TEST rockchip,channel_nums = <4>; //channel nums, 1/2/4 rockchip,dual_edge = <0>; // pclk dual edge, 0/1 rockchip,default_rect= <1920 1080>; // default resolution port {nvp6158_out: endpoint { remote-endpoint = <&dvp_in_bcam1>; }; }; };clocks = <&cru CLK_CIF_OUT>; //走GPIO CIF时钟 配置为是27M
clock-names = "xvclk";
nvp6158->xvclk = devm_clk_get(dev, "xvclk");if (IS_ERR(nvp6158->xvclk)) {dev_err(dev, "Failed to get xvclk\n");return -EINVAL;}if (ret < 0) {#define NVP6158_XVCLK_FREQ 27000000ret = clk_set_rate(nvp6158->xvclk, NVP6158_XVCLK_FREQ);dev_err(dev, "Failed to set xvclk rate (24MHz)\n");return ret;}rockchip,dvp_mode = "BT1120" :走BT1120模式
rockchip,channel_nums = <4>;//并口的数据lane ,只有一条lane 可配置1 参数:1/2/4
rockchip,default_rect= <1280 720>;摄像头分辨率。 rkcif会从nvp6158驱动里获取
rockchip,dual_edge :pclk的边沿有效 一般用于配置分辨率 720p:0 1080P:1 如下
rkcif 会获取对应的pclk dual_edge
static int nvp6158_g_mbus_config(struct v4l2_subdev *sd,struct v4l2_mbus_config *cfg)
{struct nvp6158 *nvp6158 = to_nvp6158(sd);cfg->type = V4L2_MBUS_BT656;if (nvp6158->dual_edge == 1) {cfg->flags = RKMODULE_CAMERA_BT656_CHANNELS |V4L2_MBUS_PCLK_SAMPLE_RISING |V4L2_MBUS_PCLK_SAMPLE_FALLING;} else {cfg->flags = RKMODULE_CAMERA_BT656_CHANNELS |V4L2_MBUS_PCLK_SAMPLE_RISING;}return 0;
}nvp6158关注的代码:
初始化热拔插工作队列:
INIT_DELAYED_WORK(&nvp6158->plug_state_check.d_work, nvp6158_plug_state_check_work);nvp6158->plug_state_check.state_check_wq =create_singlethread_workqueue("nvp6158_work_queue");if (nvp6158->plug_state_check.state_check_wq == NULL) {dev_err(dev, "%s(%d): %s create failed.\n", __func__, __LINE__,"nvp6158_work_queue");}热拔插队列:打开DVP摄像头后 nvp6158_no_signal 读取nvp6158 0xa8地址,判断摄像头有无接入
#ifdef WORK_QUEUE
static void nvp6158_plug_state_check_work(struct work_struct *work)
{struct sensor_state_check_work *params_check =container_of(work, struct sensor_state_check_work, d_work.work);struct nvp6158 *nvp6158 =container_of(params_check, struct nvp6158, plug_state_check);struct i2c_client *client = nvp6158->client;struct v4l2_subdev *sd = &nvp6158->subdev;u8 novid_status = 0x00;u8 sync_status = 0x00;nvp6158_no_signal(sd, &novid_status);nvp6158_sync(sd, &sync_status);nvp6158->cur_detect_status = novid_status;/* detect state change to determine is there has plug motion */novid_status = nvp6158->cur_detect_status ^ nvp6158->last_detect_status;if (novid_status)nvp6158->hot_plug = true;elsenvp6158->hot_plug = false;nvp6158->last_detect_status = nvp6158->cur_detect_status;dev_info(&client->dev, "%s has plug motion? (%s)", __func__,nvp6158->hot_plug ? "true" : "false");if (nvp6158->hot_plug) {dev_info(&client->dev, "queue_delayed_work 1500ms, if has hot plug motion.");queue_delayed_work(nvp6158->plug_state_check.state_check_wq,&nvp6158->plug_state_check.d_work, msecs_to_jiffies(1500));nvp6158_write(client, 0xFF, 0x20);nvp6158_write(client, 0x00, (sync_status << 4) | sync_status);usleep_range(3000, 5000);nvp6158_write(client, 0x00, 0xFF);} else {dev_info(&client->dev, "queue_delayed_work 100ms, if no hot plug motion.");queue_delayed_work(nvp6158->plug_state_check.state_check_wq,&nvp6158->plug_state_check.d_work, msecs_to_jiffies(100));}
}
#endif调试:
I2C无法读取写入:
1.确认电源电压
2.确认时钟脚有无27M CLK信号
3.排查是否其他器件影响
无图像:1.确认时钟脚有无27M CLK信号
2.确认下发的分辨率与接入的摄像头是否对应得上
相关文章:
RK DVP NVP6158配置 学习
NVP6158简介 NVP6158C是一款4通道通用RX,提供高质量图像的芯片。它接受来自摄像机和其他视频信号的独立4通道通用输入来源。它将4通道通用1M至8M 7.5P视频格式数字化并解码为代表8位ITU-R BT.656/1120 4:2:2格式的数字分量视频,并将单独的BT.601格式与27…...

C++基础2:C++基本数据类型和控制结构
此专栏为移动机器人知识体系下的编程语言中的 C {\rm C} C从入门到深入的专栏,参考书籍:《深入浅出 C {\rm C} C》(马晓锐)和《从 C {\rm C} C到 C {\rm C} C精通面向对象编程》(曾凡锋等)。 2.C基本数据类型和控制结构 2.1 C基本数据类型 程序是由算法…...

HFSS仿真双频微带天线学习笔记
HFSS仿真双频微带天线 文章目录 HFSS仿真双频微带天线1、 求解器设置2、 建模3、 激励方式设置4、 边界条件设置5、 扫频设置6、 设计检查,仿真分析7、 数据后处理 这里重点关注HFSS软件的操作,关于理论知识将在后面的文章中进行更新。 设计要求…...
)
【十一】【SQL】外连接(左外连接,右外连接)
数据库中的外连接(Outer Join)用于连接两个表,并包括两个表中的匹配行以及左表(LEFT JOIN)或右表(RIGHT JOIN)中未匹配的行。外连接分为两种主要类型: 左外连接(LEFT OU…...
敏捷开发模型:一种灵活、协作和持续的软件开发方法
敏捷开发模型:一种灵活、协作和持续的软件开发方法 引言 在软件开发领域,随着市场需求的不断变化和技术的迅速发展,传统的瀑布模型逐渐暴露出其局限性。为了应对这些挑战,敏捷开发模型应运而生。敏捷开发模型强调灵活、协作和持…...

软件设计师10--计算机组成与体系结构章节回顾
软件设计师10--计算机组成与体系结构章节回顾 章节重要内容考情分析 章节重要内容 考情分析...
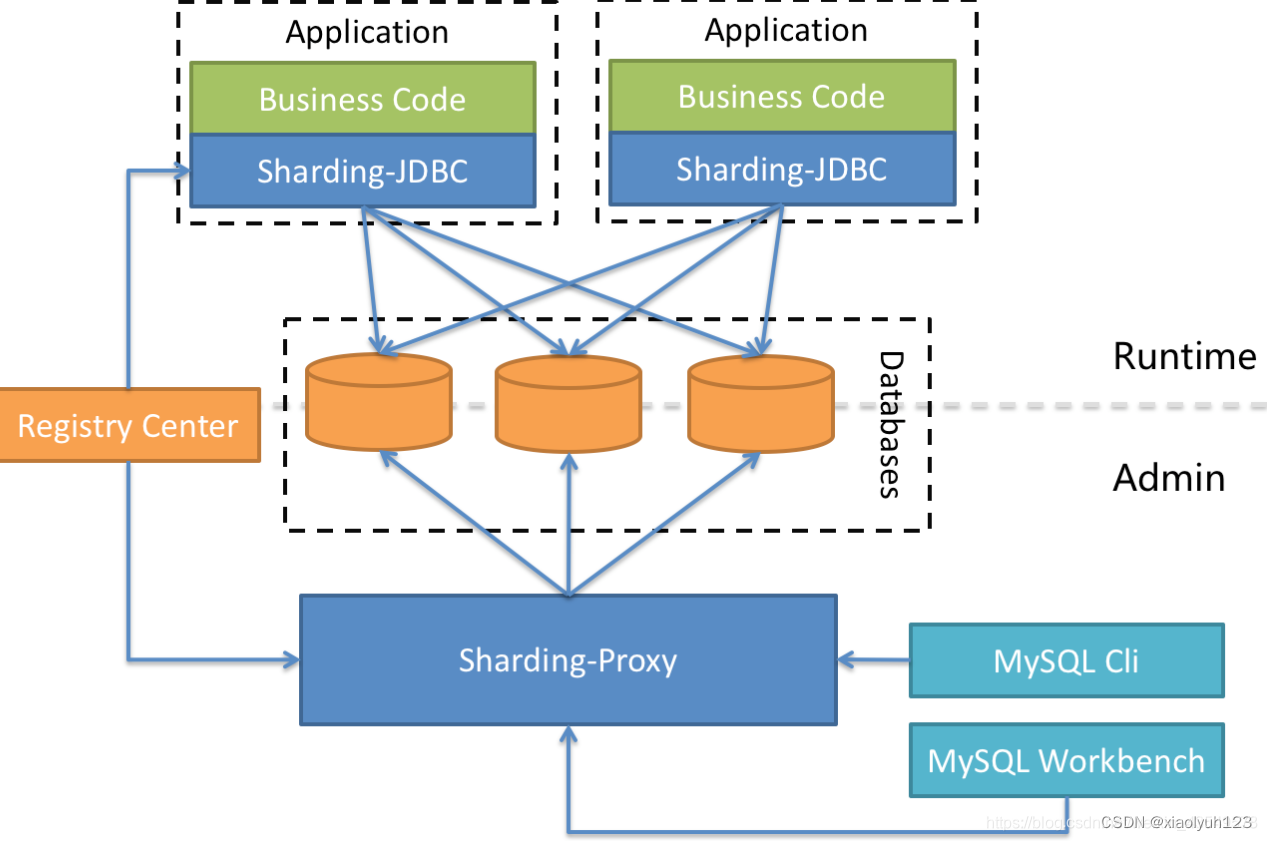
数据库分库分表中间件选择
目前分库分表的中间件有三种设计思路,分别是: 采用分散式架构,适用于用Java开发的高性能轻量级OLTP应用程序,以Sharding-JDBC为代表。采用中间层Proxy架构,提供了静态输入和所有语言支持,适用于OLAP应用程…...
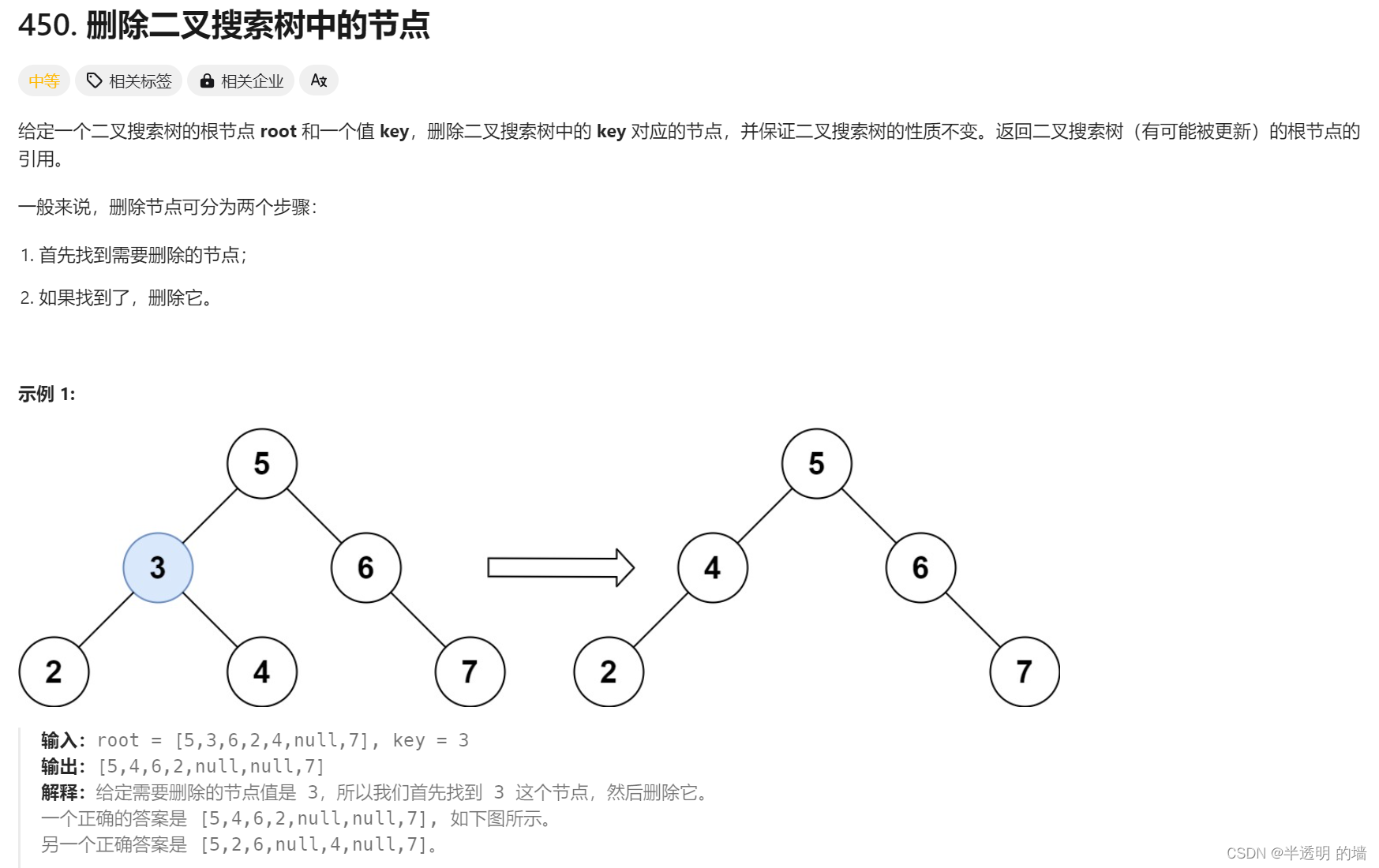
代码随想录算法训练营第22天|235.二叉搜索树的最近公共祖先、701.二叉搜索树中的插入操作、450.删除二叉搜索树中的节点
目录 一、力扣235.二叉搜索树的最近公共祖先1.1 题目1.2 思路1.3 代码 二、力扣701.二叉搜索树中的插入操作2.1 题目2.2 思路2.3 代码 三、力扣450.删除二叉搜索树中的节点3.1 题目3.2 思路3.3 代码3.4 总结 一、力扣235.二叉搜索树的最近公共祖先 1.1 题目 1.2 思路 利用二叉…...
)
基于SpringBoot的医护人员排班系统详细开题报告(源码)
项目源码:https://gitee.com/oklongmm/biye2 引言 医护人员排班系统是医疗机构中的重点管理工作之一。借助现代化的计算机技术,可以大大提升排班的效率和精准度。因此,本研究旨在使用SpringBoot框架设计和实现一个功能完善的医护人员排班…...

CDH6.3.1离线安装
一、从官方文档整体认识CDH 官方文档地址如下: CDH Overview | 6.3.x | Cloudera Documentation CDH是Apache Hadoop和相关项目中最完整、测试最全面、最受欢迎的发行版。CDH提供Hadoop的核心元素、可扩展存储和分布式计算,以及基于Web的用户界面和重…...

Pytorch之卷积操作
卷积是一种基本的数学操作,常用于信号处理和图像处理领域。在计算机视觉中,卷积操作是一种重要的技术,用于提取图像的特征并进行图像处理。 卷积操作基于一个卷积核(也称为滤波器或权重),它是一个小的矩阵…...

2024年春招小红书前端实习面试题分享
文章目录 导文面试重点一、方便介绍一下,你之前实习都做了什么嘛?二、 可以讲一下封装组件相关逻辑嘛?1. 为什么要封装组件?2. 封装组件的步骤3. 封装组件的原则4. 组件的复用和扩展5. 组件的维护和文档 三、项目的性能优化你有什…...
软件测试--性能测试工具JMeter
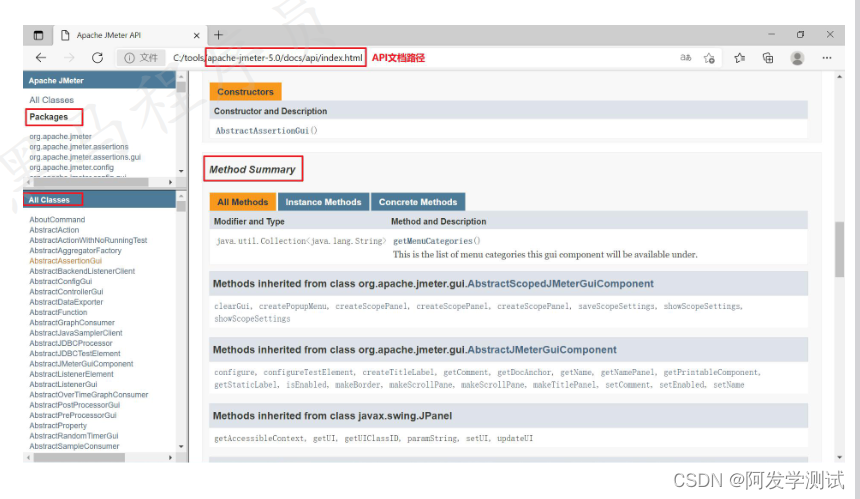
软件测试--性能测试工具JMeter 主流性能测试工具1.主流性能测试工具Loadrunner和Jmeter对比 —— 相同点2.主流性能测试工具Loadrunner和Jmeter对比 —— 不同点JMeter基本使用JMeter环境搭建1.安装JDK:2.安装Jmeter:3.注意点:JMeter功能概要1. JMeter文件目录介绍1.1 bin目…...
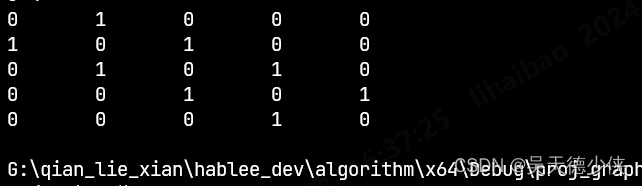
c++/c图的邻近矩阵表示
#include<iostream> using namespace std;#define MaxVerterNum 100 typedef char VerterType; typedef int EdgeType; typedef struct {VerterType vexs[MaxVerterNum]; // 存储顶点EdgeType edges[MaxVerterNum][MaxVerterNum]; // 存储邻接矩阵int n, e; // 顶点数和边…...

cocos-lua定时器用法
本文介绍cocos-lua(非Quick-cocos)的定时器用法 定时器按是否会随节点销毁,可分为节点调度器和全局调度器 一.节点调度器 frameworks\cocos2d-x\cocos\scripting\lua-bindings\script\cocos2d\deprecated.lua中实现了了schedule和 performWithDelay 1.1.schedul…...
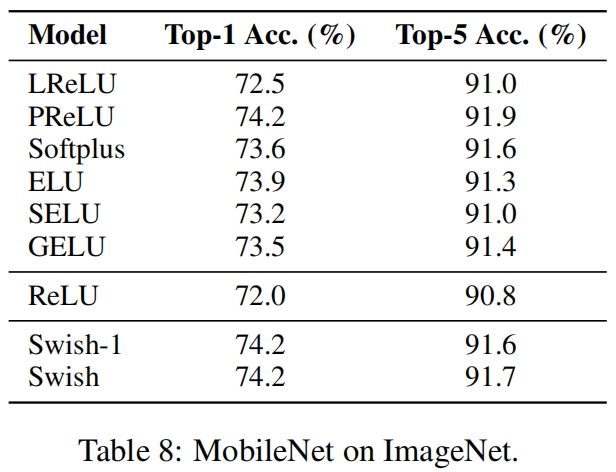
激活函数Swish(ICLR 2018)
paper:Searching for Activation Functions 背景 深度网络中激活函数的选择对训练和任务表现有显著的影响。目前,最成功和最广泛使用的激活函数是校正线性单元(ReLU)。虽然各种手工设计的ReLU替代方案被提出,但由于在…...

【C++ 标准流,文件流】
C 标准流,文件流 ■ 标准输入,输出流,■ 文件流(ofstream写入,ifstream读取,fstream创建-写入-读取)■ open()■ ofstream■ ifstream■ 流插入<<■ 文件位置指针 ■ 标准输入,…...

【排序】详解冒泡排序
一、思想 冒泡排序的基本思想是利用两两比较相邻记录的方式,通过一系列的比较和交换操作,使得较大或较小的元素逐渐移动到数列的一端。在每一轮的排序过程中,都会从数列的起始位置开始,对相邻的元素进行比较,如果它们…...
什么是Docker容器?
Docker是一种轻量级的虚拟化技术,同时是一个开源的应用容器运行环境搭建平台,可以让开发者以便捷方式打包应用到一个可移植的容器中,然后安装至任何运行Linux或Windows等系统的服务器上。相较于传统虚拟机,Docker容器提供轻量化的…...

(C++练习)选择题+编程题
个人主页:Lei宝啊 愿所有美好如期而遇 选择题 以下程序输出结果是什么() class A{public:virtual void func(int val 1){ std::cout<<"A->"<< val <<std::endl;}virtual void test(){ func();}};class B…...

【bash】git-bash windows 配置ssh免密登录ubuntu
需要一台ubuntu机器,长期运行 作为代理服务器,帮我访问github等白名单网络。 期望端口映射,长期运行。 在 Git Bash 环境下 在 Git Bash 环境下!Git Bash 确实完美支持 ~ 符号,而且我看到你的 ~/.ssh/ 目录下,id_ed25519.pub 已经静静地躺在那里了。 既然文件都在,而且…...

AhMyth:跨平台Android远程管理工具的完整指南与实战教程
AhMyth:跨平台Android远程管理工具的完整指南与实战教程 【免费下载链接】AhMyth Cross-Platform Android Remote Administration Tool | The only maintained version of AhMyth on github | A revival of the original repository at https://GitHub.com/AhMyth/A…...

紧急通知:Claude文档解析API响应延迟突增300%?立即启用这3个异步缓存+增量摘要策略保生产可用性
更多请点击: https://intelliparadigm.com 第一章:Claude复杂文档分析工作流的稳定性危机本质 当处理百页PDF、嵌套Markdown表格、多语言混合注释及跨页公式引用的法律合同时,Claude模型常在推理链中出现非确定性断裂——并非简单“超时”或…...

从零开始:5分钟掌握Mermaid Live Editor,告别复杂图表绘制烦恼
从零开始:5分钟掌握Mermaid Live Editor,告别复杂图表绘制烦恼 【免费下载链接】mermaid-live-editor Edit, preview and share mermaid charts/diagrams. New implementation of the live editor. 项目地址: https://gitcode.com/GitHub_Trending/me/…...

C++的内存管理详细解释
一、C/C内存分布栈又叫堆栈,非静态局部变量/函数参数/返回值等等,栈是向下增长的。内存映射段是高效的I/O映射方式,用于装载一个共享的动态内存库。用户可使用系统接口创建共享共享内存,做进程间通信。堆用于程序运行时动态内存分…...

在多元市场中的数据角色招聘与面试
原文:towardsdatascience.com/the-two-sides-of-hiring-recruiting-vs-interviewing-for-data-roles-in-diverse-markets-f65b49990687 招聘桌两边的故事 我有在招聘桌两边的故事,有些是成功的,有些则不那么成功。 例如,我可以告…...

从‘六度空间’到HNSW:图解这个让推荐系统变快的底层算法
从“六度空间”到HNSW:让推荐系统快如闪电的底层逻辑 你是否想过,为什么社交平台上总能精准推荐你可能认识的人?电商网站能在毫秒间为你匹配心仪商品?这一切背后,都藏着一个将“六度分隔理论”数学化的算法——HNSW&am…...
)
仅限本周开放|Lovable高阶工程化实践内部培训课件(含模块化架构图、依赖注入容器源码注释版)
更多请点击: https://codechina.net 第一章:Lovable应用开发完整教程 Lovable 是一个面向现代 Web 应用的轻量级响应式框架,专为构建高交互性、可访问性强且易于维护的单页应用(SPA)而设计。它采用声明式组件模型与响…...

企业内训系统集成AI问答时采用Taotoken的成本控制实践
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内训系统集成AI问答时采用Taotoken的成本控制实践 应用场景类,设想一个企业开发内训知识库系统的场景,…...

[qemu+kvm]: vfio调用流程
透传pcie设备全流程: QEMU测:vfio_realize->-> vfio_get_group->open("/dev/vfio/group id")-> 进入内核态->vfio_group_fops_open //分配group, filep->private_data group;注意:/dev/vfio/group …...