rearrangement-challenge-2022环境使用学习(一)
搭建了rearrangement-challenge-2022的环境:
https://github.com/facebookresearch/habitat-challenge/tree/rearrangement-challenge-2022
habitat最大的缺点是对不同的版本非常的敏感。本文只是针对rearrangement-challenge-2022的学习。
文档一开始会很不完善,会慢慢的补齐。
1、如何使用配置文件初始化环境
主要使用 habitat.Env类进行初始化。传一个config参数,该参数可以通过habitat.get_config()得到,该函数需要指定一个配置文件的路径,举例如下:
import habitat
env = habitat.Env(config=habitat.get_config("/home/yons/LK/habitat-challenge/habitat-lab/configs/datasets/pointnav/habitat_test.yaml")
配置环境的过程会打印很多信息如下:
# 2024-03-04 21:17:09,546 Initializing dataset PointNav-v1
# 2024-03-04 21:17:09,708 initializing sim Sim-v0
# [21:17:09:715104]:[Metadata] AttributesManagerBase.h(380)::createFromJsonOrDefaultInternal : <Dataset>: Proposing JSON name : default.scene_dataset_config.json from original name : default| This file does not exist.
# [21:17:09:715197]:[Metadata] AssetAttributesManager.cpp(121)::createObject : Asset attributes (capsule3DSolid:capsule3DSolid_hemiRings_4_cylRings_1_segments_12_halfLen_0.75_useTexCoords_false_useTangents_false) created and registered.
# [21:17:09:715224]:[Metadata] AssetAttributesManager.cpp(121)::createObject : Asset attributes (capsule3DWireframe:capsule3DWireframe_hemiRings_8_cylRings_1_segments_16_halfLen_1) created and registered.
# [21:17:09:715242]:[Metadata] AssetAttributesManager.cpp(121)::createObject : Asset attributes (coneSolid:coneSolid_segments_12_halfLen_1.25_rings_1_useTexCoords_false_useTangents_false_capEnd_true) created and registered.
# [21:17:09:715258]:[Metadata] AssetAttributesManager.cpp(121)::createObject : Asset attributes (coneWireframe:coneWireframe_segments_32_halfLen_1.25) created and registered.
# [21:17:09:715270]:[Metadata] AssetAttributesManager.cpp(121)::createObject : Asset attributes (cubeSolid:cubeSolid) created and registered.
# [21:17:09:715282]:[Metadata] AssetAttributesManager.cpp(121)::createObject : Asset attributes (cubeWireframe:cubeWireframe) created and registered.
# [21:17:09:715299]:[Metadata] AssetAttributesManager.cpp(121)::createObject : Asset attributes (cylinderSolid:cylinderSolid_rings_1_segments_12_halfLen_1_useTexCoords_false_useTangents_false_capEnds_true) created and registered.
# [21:17:09:715314]:[Metadata] AssetAttributesManager.cpp(121)::createObject : Asset attributes (cylinderWireframe:cylinderWireframe_rings_1_segments_32_halfLen_1) created and registered.
# [21:17:09:715326]:[Metadata] AssetAttributesManager.cpp(121)::createObject : Asset attributes (icosphereSolid:icosphereSolid_subdivs_1) created and registered.
# [21:17:09:715369]:[Metadata] AssetAttributesManager.cpp(121)::createObject : Asset attributes (icosphereWireframe:icosphereWireframe_subdivs_1) created and registered.
# [21:17:09:715397]:[Metadata] AssetAttributesManager.cpp(121)::createObject : Asset attributes (uvSphereSolid:uvSphereSolid_rings_8_segments_16_useTexCoords_false_useTangents_false) created and registered.
# [21:17:09:715429]:[Metadata] AssetAttributesManager.cpp(121)::createObject : Asset attributes (uvSphereWireframe:uvSphereWireframe_rings_16_segments_32) created and registered.
# [21:17:09:715438]:[Metadata] AssetAttributesManager.cpp(110)::AssetAttributesManager : Built default primitive asset templates : 12
# [21:17:09:715778]:[Metadata] SceneDatasetAttributesManager.cpp(35)::createObject : File (default) not found, so new default dataset attributes created and registered.
# [21:17:09:715787]:[Metadata] MetadataMediator.cpp(120)::createSceneDataset : Dataset default successfully created.
# [21:17:09:715798]:[Metadata] AttributesManagerBase.h(380)::createFromJsonOrDefaultInternal : <Physics Manager>: Proposing JSON name : ./data/default.physics_config.json from original name : ./data/default.physics_config.json| This file exists.
# [21:17:09:715881]:[Metadata] PhysicsAttributesManager.cpp(26)::createObject : JSON Configuration File (./data/default.physics_config.json) based physics manager attributes created and registered.
# [21:17:09:715890]:[Metadata] MetadataMediator.cpp(203)::setActiveSceneDatasetName : Previous active dataset changed to default successfully.
# [21:17:09:715896]:[Metadata] MetadataMediator.cpp(175)::setCurrPhysicsAttributesHandle : Old physics manager attributes changed to ./data/default.physics_config.json successfully.
# [21:17:09:715902]:[Metadata] MetadataMediator.cpp(66)::setSimulatorConfiguration : Set new simulator config for scene/stage : data/scene_datasets/habitat-test-scenes/skokloster-castle.glb and dataset : default which is currently active dataset.
# Renderer: NVIDIA GeForce RTX 2080 Ti/PCIe/SSE2 by NVIDIA Corporation
# OpenGL version: 4.6.0 NVIDIA 510.108.03
# Using optional features:
# GL_ARB_vertex_array_object
# GL_ARB_ES2_compatibility
# GL_ARB_separate_shader_objects
# GL_ARB_robustness
# GL_ARB_texture_storage
# GL_ARB_invalidate_subdata
# GL_ARB_texture_storage_multisample
# GL_ARB_multi_bind
# GL_ARB_direct_state_access
# GL_ARB_get_texture_sub_image
# GL_ARB_texture_filter_anisotropic
# GL_KHR_debug
# Using driver workarounds:
# no-forward-compatible-core-context
# no-layout-qualifiers-on-old-glsl
# nv-zero-context-profile-mask
# nv-implementation-color-read-format-dsa-broken
# nv-cubemap-inconsistent-compressed-image-size
# nv-cubemap-broken-full-compressed-image-query
# nv-compressed-block-size-in-bits
# [21:17:09:817318]:[Metadata] MetadataMediator.cpp(297)::getSceneInstanceAttributesByName : Dataset : default has no preloaded SceneInstanceAttributes or StageAttributes named : data/scene_datasets/habitat-test-scenes/skokloster-castle.glb so loading/creating a new StageAttributes with this name, and then creating a SceneInstanceAttributes with the same name that references this stage.
# [21:17:09:817339]:[Metadata] AttributesManagerBase.h(380)::createFromJsonOrDefaultInternal : <Stage Template>: Proposing JSON name : data/scene_datasets/habitat-test-scenes/skokloster-castle.stage_config.json from original name : data/scene_datasets/habitat-test-scenes/skokloster-castle.glb| This file does not exist.
# [21:17:09:817384]:[Metadata] AbstractObjectAttributesManagerBase.h(184)::createObject : File (data/scene_datasets/habitat-test-scenes/skokloster-castle.glb) exists but is not a recognized config filename extension, so new default Stage Template attributes created and registered.
# [21:17:09:817412]:[Metadata] SceneDatasetAttributes.cpp(47)::addNewSceneInstanceToDataset : Dataset : 'default' : Stage Attributes 'data/scene_datasets/habitat-test-scenes/skokloster-castle.glb' specified in Scene Attributes exists in dataset library.
# [21:17:09:817418]:[Metadata] SceneDatasetAttributes.cpp(84)::addNewSceneInstanceToDataset : Dataset : 'default' : Lighting Layout Attributes 'no_lights' specified in Scene Attributes but does not exist in dataset, so creating.
# [21:17:09:817426]:[Metadata] AttributesManagerBase.h(380)::createFromJsonOrDefaultInternal : <Lighting Layout>: Proposing JSON name : no_lights.lighting_config.json from original name : no_lights| This file does not exist.
# [21:17:09:817437]:[Metadata] LightLayoutAttributesManager.cpp(36)::createObject : File (no_lights) not found, so new default light layout attributes created and registered.
# [21:17:09:817445]:[Sim] Simulator.cpp(237)::createSceneInstance : Navmesh file location in scene instance : data/scene_datasets/habitat-test-scenes/skokloster-castle.navmesh
# [21:17:09:817455]:[Sim] Simulator.cpp(242)::createSceneInstance : Loading navmesh from data/scene_datasets/habitat-test-scenes/skokloster-castle.navmesh
# [21:17:09:817468]:[Nav] PathFinder.cpp(852)::loadNavMesh : NavMeshSettings aren't present, guessing that they are the default
# [21:17:09:817532]:[Sim] Simulator.cpp(244)::createSceneInstance : Navmesh Loaded.
# [21:17:09:817545]:[Scene] SceneGraph.h(85)::createDrawableGroup : Created DrawableGroup:
# [21:17:09:817552]:[Assets] ResourceManager.cpp(297)::loadSemanticSceneDescriptor : SceneInstance : data/scene_datasets/habitat-test-scenes/skokloster-castle.glb proposed Semantic Scene Descriptor filename : data/scene_datasets/habitat-test-scenes/skokloster-castle.scn
# [21:17:09:817560]:[Assets] ResourceManager.cpp(344)::loadSemanticSceneDescriptor : SSD File Naming Issue! Neither SceneInstanceAttributes-provided name : data/scene_datasets/habitat-test-scenes/skokloster-castle.scn nor constructed filename : data/scene_datasets/habitat-test-scenes/info_semantic.json exist on disk.
# [21:17:09:817579]:[Assets] ResourceManager.cpp(1652)::ConfigureImporterManagerGLExtensions : Importing Basis files as BC7.
# [21:17:09:817696]:[Sim] Simulator.cpp(302)::createSceneInstance : Using scene instance-specified Light key : - no_lights -
# [21:17:09:817708]:[Metadata] MetadataMediator.cpp(66)::setSimulatorConfiguration : Set new simulator config for scene/stage : data/scene_datasets/habitat-test-scenes/skokloster-castle.glb and dataset : default which is currently active dataset.
# [21:17:09:817723]:[Sim] Simulator.cpp(412)::instanceStageForSceneAttributes : Start to load stage named : data/scene_datasets/habitat-test-scenes/skokloster-castle.glb with render asset : data/scene_datasets/habitat-test-scenes/skokloster-castle.glb and collision asset : data/scene_datasets/habitat-test-scenes/skokloster-castle.glb
# [21:17:09:817752]:[Assets] ResourceManager.cpp(691)::createStageAssetInfosFromAttributes : Frame :{"up":[0,0,1],"front":[0,1,0],"origin":[0,0,0]} for render mesh named : data/scene_datasets/habitat-test-scenes/skokloster-castle.glb|{"up":[0,0,1],"front":[0,1,0],"origin":[0,0,0]} for semantic mesh named : with type specified as semantic|Semantic Txtrs : False
# [21:17:09:817760]:[Assets] ResourceManager.cpp(507)::loadStage : Start load render asset data/scene_datasets/habitat-test-scenes/skokloster-castle.glb .
# [21:17:09:817765]:[Assets] ResourceManager.cpp(973)::loadStageInternal : Attempting to load stage data/scene_datasets/habitat-test-scenes/skokloster-castle.glb
# [21:17:09:817779]:[Assets] ResourceManager.cpp(855)::loadRenderAsset : Loading general asset named: data/scene_datasets/habitat-test-scenes/skokloster-castle.glb
# [21:17:09:817785]:[Assets] ResourceManager.cpp(1652)::ConfigureImporterManagerGLExtensions : Importing Basis files as BC7.
# [21:17:10:458713]:[Assets] ResourceManager.cpp(2089)::loadMaterials : Building 2 materials for asset named 'skokloster-castle.glb' :
# [21:17:10:458752]:[Assets] ResourceManager.cpp(2194)::loadMaterials : Idx 00:Flat.
# [21:17:10:458766]:[Assets] ResourceManager.cpp(2194)::loadMaterials : Idx 01:Flat.
# [21:17:10:516568]:[Sim] Simulator.cpp(439)::instanceStageForSceneAttributes : Successfully loaded stage named : data/scene_datasets/habitat-test-scenes/skokloster-castle.glb
# [21:17:10:516599]:[Sim] Simulator.cpp(471)::instanceStageForSceneAttributes :
# ---
# The active scene does not contain semantic annotations : activeSemanticSceneID_ = 0
# ---
# [21:17:10:516615]:[Sim] Simulator.cpp(205)::reconfigure : CreateSceneInstance success == true for active scene name : data/scene_datasets/habitat-test-scenes/skokloster-castle.glb with renderer.
# 2024-03-04 21:17:10,517 Initializing task Nav-v0
这其中有很多子问题如下:
1.1 如何设置配置文件中要配置的参数
办法一:直接在yaml配置文件中修改
该方法简单直接不需要举例
办法二:在代码中修改
通过habitat.get_config()获取到config变量后,通过config.defrost()之后便可以在代码中设置一些变量,设置完后通过config.freeze()冻结配置参数
config=habitat.get_config("/home/yons/LK/habitat-challenge/habitat-lab/configs/datasets/pointnav/habitat_test.yaml"
config.defrost()
config.DATASET.SPLIT = "val"
config.freeze()
1.2 habitat.get_config在哪里定义
在…/habitat-challenge/habitat-lab/habitat/config/default.py中定义。该文件中定义了:
1) get_config()方法
2)所有配置变量的默认值
2 关于动作
…/habitat-lab/habitat/sims/habitat_simulator/actions.py中定义了默认的动作:
class _DefaultHabitatSimActions(Enum):STOP = 0MOVE_FORWARD = 1TURN_LEFT = 2TURN_RIGHT = 3LOOK_UP = 4LOOK_DOWN = 5
要执行动作需要初始化环境,然后通过HabitatSimActions获取动作,然后通过env.step执行动作
from habitat.sims.habitat_simulator.actions import HabitatSimActions
env = habitat.Env( config=habitat.get_config("/home/yons/LK/habitat-challenge/habitat-lab/configs/datasets/pointnav/habitat_test.yaml")
observations = env.reset()
action = HabitatSimActions.MOVE_FORWARD
observations = env.step(action)
一个通过键盘与环境交互的示例代码(quick_start3.py文件)如下:
import habitat
from habitat.sims.habitat_simulator.actions import HabitatSimActions
import cv2FORWARD_KEY="w"
LEFT_KEY="a"
RIGHT_KEY="d"
FINISH="f"
####下面是向上看和向下看的动作,并不是所有的agent都可以向上看和向下看
###一个问题是为什么没有后退的动作?
# LOOKUP_KEY="u"
# LOOKDOWN_KEY="j"def transform_rgb_bgr(image):return image[:, :, [2, 1, 0]]def example():#选择一个配置文件初始化环境(配置文件需要有什么参数?)env = habitat.Env(config=habitat.get_config("/home/yons/LK/habitat-challenge/habitat-lab/configs/datasets/pointnav/habitat_test.yaml"))print("Environment creation successful")observations = env.reset() #print('type(observations):',type(observations)) #type(observations): <class 'habitat.core.simulator.Observations'>print('observations["rgb"].shape:',observations["rgb"].shape) #observations["rgb"].shape: (480, 640, 3)# cv2.imshow("RGB", transform_rgb_bgr(observations["rgb"]))cv2.imshow("RGB", observations["rgb"]) ####不知道为啥要转化rgb信号的顺序,经过测试,不转换的确看着不自然。print("Agent stepping around inside environment.")count_steps = 0while not env.episode_over:keystroke = cv2.waitKey(0) #等待用户输入,操纵agent左右转和前进,与环境进行交互if keystroke == ord(FORWARD_KEY): #如果是敲击的我们在最上面定义的某个键,做对应的事情,并打印action = HabitatSimActions.MOVE_FORWARDprint("action: FORWARD")elif keystroke == ord(LEFT_KEY):action = HabitatSimActions.TURN_LEFTprint("action: LEFT")elif keystroke == ord(RIGHT_KEY):action = HabitatSimActions.TURN_RIGHTprint("action: RIGHT")elif keystroke == ord(FINISH):action = HabitatSimActions.STOPprint("action: FINISH")else:print("INVALID KEY")continueobservations = env.step(action)####env.step(action)里面的action是HabitatSimActions中定义的动作count_steps += 1# cv2.imshow("RGB", transform_rgb_bgr(observations["rgb"]))cv2.imshow("RGB", observations["rgb"])print("Episode finished after {} steps.".format(count_steps))if (action == HabitatSimActions.STOP# and observations["pointgoal_with_gps_compass"][0] < 0.2):print("you successfully navigated to destination point")else:print("your navigation was unsuccessful")if __name__ == "__main__":example()
3获取habitat-lab路径
通过habitat.utils.gym_definitions.base_dir获取
import habitat.utils.gym_definitions as habitat_gym
print('habitat_gym.base_dir:',habitat_gym.base_dir)
下面是一个例子:
import habitat.utils.gym_definitions as habitat_gym
print('habitat_gym.base_dir:',habitat_gym.base_dir)
import osimport gym
import gym.spaces as spaces
import numpy as npimport habitat
import habitat.utils.gym_definitions as habitat_gym
from habitat.core.embodied_task import Measure
from habitat.core.registry import registry
from habitat.core.simulator import Sensor, SensorTypes
from habitat.tasks.rearrange.rearrange_sensors import RearrangeReward
from habitat.tasks.rearrange.rearrange_task import RearrangeTask
from habitat.utils.render_wrapper import overlay_frame
from habitat.utils.visualizations.utils import observations_to_image
from habitat_sim.utils import viz_utils as vut# Quiet the Habitat simulator logging
os.environ["MAGNUM_LOG"] = "quiet"
os.environ["HABITAT_SIM_LOG"] = "quiet"def insert_render_options(config):# Added settings to make rendering higher resolution for better visualizationconfig.defrost()config.SIMULATOR.THIRD_RGB_SENSOR.WIDTH = 512config.SIMULATOR.THIRD_RGB_SENSOR.HEIGHT = 512config.SIMULATOR.CONCUR_RENDER = Falseconfig.SIMULATOR.AGENT_0.SENSORS.append("THIRD_RGB_SENSOR")config.freeze()return configimport importlib# If the import block fails due to an error like "'PIL.TiffTags' has no attribute
# 'IFD'", then restart the Colab runtime instance and rerun this cell and the previous cell.
import PILimportlib.reload(PIL.TiffTags) # To potentially avoid PIL problemprint('habitat_gym.base_dir:',habitat_gym.base_dir)##################用habitat自己的方式###########################
with habitat.Env(config=insert_render_options(habitat.get_config(os.path.join(habitat_gym.base_dir,"configs/tasks/rearrange/pick.yaml",)))
) as env:observations = env.reset() # noqa: F841print("Agent acting inside environment.")count_steps = 0# To save the videovideo_file_path = "data/example_interact.mp4"video_writer = vut.get_fast_video_writer(video_file_path, fps=30)while not env.episode_over:observations = env.step(env.action_space.sample()) # noqa: F841,随机动作info = env.get_metrics()render_obs = observations_to_image(observations, info)render_obs = overlay_frame(render_obs, info)video_writer.append_data(render_obs)count_steps += 1print("Episode finished after {} steps.".format(count_steps))video_writer.close()if vut.is_notebook():#此处并没有播放vut.display_video(video_file_path)
相关文章:
)
rearrangement-challenge-2022环境使用学习(一)
搭建了rearrangement-challenge-2022的环境: https://github.com/facebookresearch/habitat-challenge/tree/rearrangement-challenge-2022 habitat最大的缺点是对不同的版本非常的敏感。本文只是针对rearrangement-challenge-2022的学习。 文档一开始会很不完善&a…...
)
[Uniapp]携带参数跳转界面(两种方法)
一、方法1:路由携参 假设现在有两个界面:界面A和界面B。并要由界面A跳转到界面B,则我们可以使用 uni.navigateTo({}) 跳转界面时,将参数附加在URL后,…...
:python常用网络请求库httpx)
Scrapy与分布式开发(2.1.2):python常用网络请求库httpx
Python httpx 模块详细讲解 一、引言 httpx 是一个用于发送 HTTP 请求的 Python 库,它提供了简单易用的 API,支持同步和异步请求,并且具有出色的性能和灵活性。httpx 是 requests 的一个现代替代品,它使用 httpcore 作为底层传输…...

07. Nginx进阶-Nginx负载均衡
简介 负载均衡 什么是负载均衡? 负载均衡,英文名称为Load Balance,其含义就是指将负载(工作任务)进行平衡、分摊到多个操作单元上进行运行。 Nginx负载均衡 什么是Nginx负载均衡? Nginx负载均衡可以大…...

windows/linux下其他位置调用指定nodejs脚本报错Error: Cannot find module ‘esm’
问题: 有一个nodejs脚本名为html2word,同目录下还有它对应的package.json,正常在html2word所在目录下执行脚本没问题,但是在其他目录执行时报错:Error: Cannot find module ‘esm’ 原因: 在其他位置执行node脚本时…...
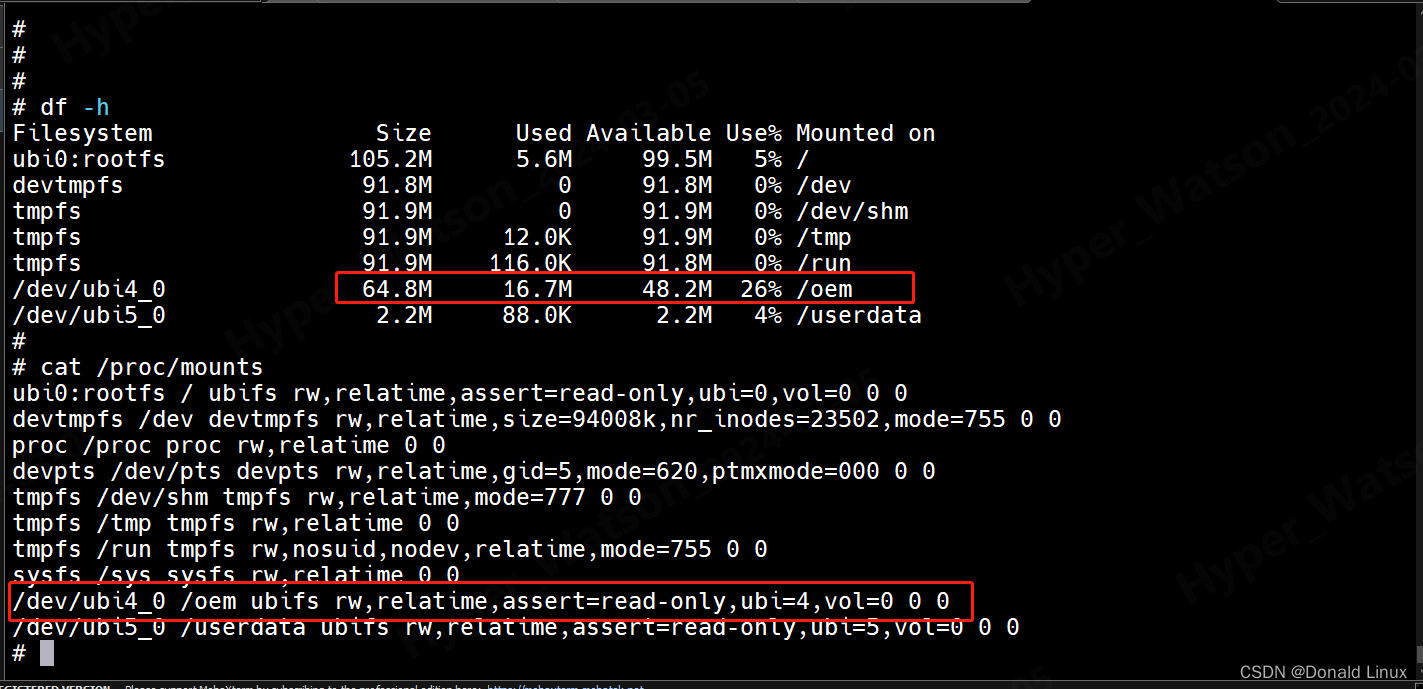
2024-03-05 linux 分区老显示满,Use 100%,原因是SquashFS 是一种只读文件系统,它在创建时就已经被填满,所有空间都被使用。
一、这两天一直纠结一个问题,无论怎么修改,linux 分区老显示满,Use 100%,全部沾满。如下图的oem分区。 二、导致出现上面的原因是:SquashFS文件系统里的空间利用率总是显示为100%。 三、SDK里面也说明SquashFS文件系统…...

蓝桥杯倒计时 41天 - KMP 算法
KMP算法 KMP算法是一种字符串匹配算法,用于匹配模式串P在文本串S中出现的所有位置。 例如S“ababac,P“aba”,那么出现的所有位置是13。 在初学KMP时,我们只需要记住和学会使用模板即可,对其原理只需简单理解ÿ…...
《汇编语言》- 读书笔记 - 第13章-int 指令
《汇编语言》- 读书笔记 - 第13章-int 指令 13.1 int 指令13.2 编写供应用程序调用的中断例程中断例程:求一 word 型数据的平方主程序中断处理程序执行效果 中断例程:将一个全是字母,以0结尾的字符串,转化为大写主程序中断处理程序…...

深入了解 Golang 条件语句:if、else、else if 和嵌套 if 的实用示例
条件语句 用于根据不同的条件执行不同的操作。Go中的条件可以是真或假。Go支持数学中常见的比较运算符: 小于 < 小于等于 < 大于 > 大于等于 > 等于 不等于 ! 此外,Go还支持常见的逻辑运算符: 逻辑与 && 逻辑或…...
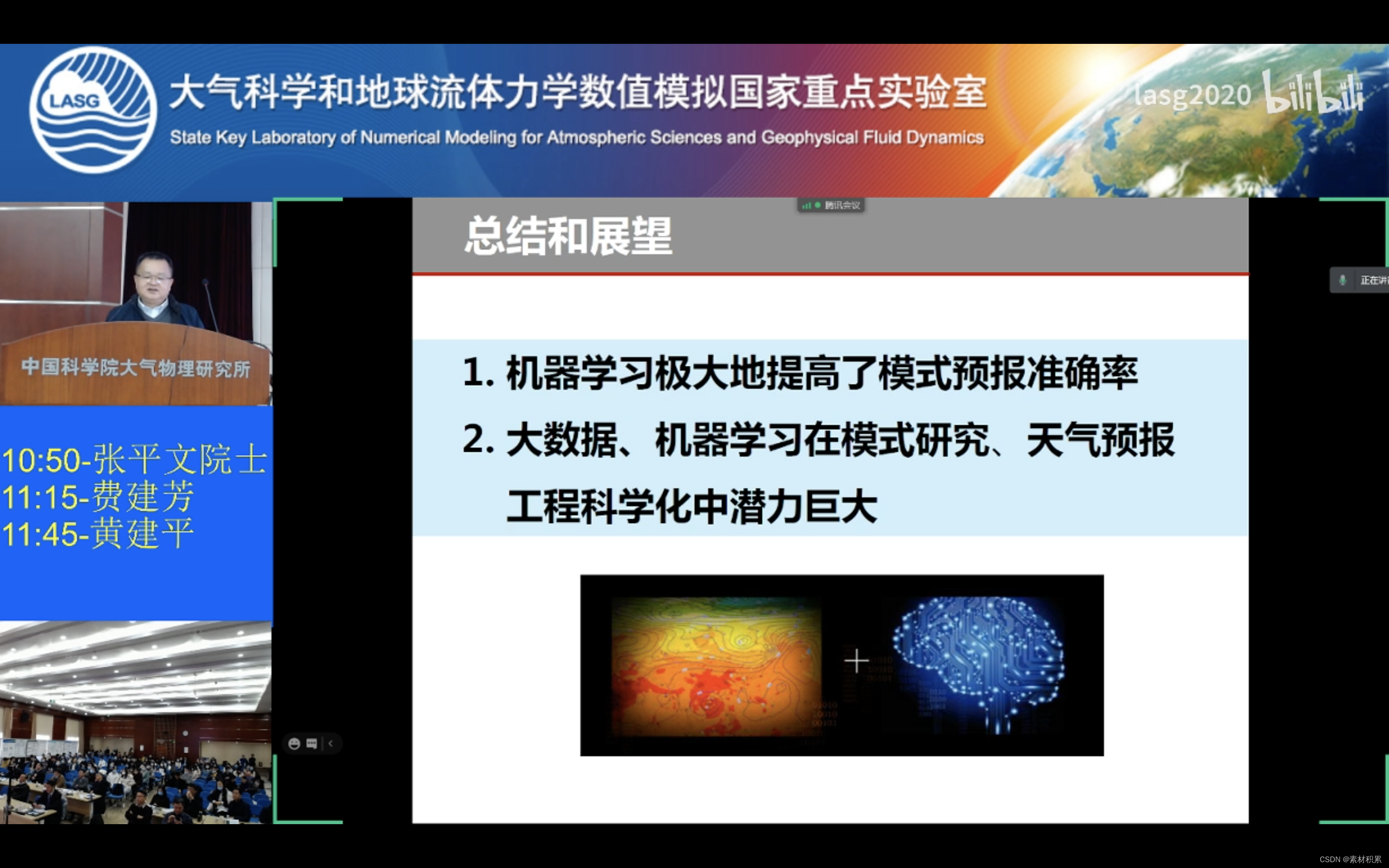
大数据和机器学习在气象预报中的应用-张平文院士
报告链接:张平文院士 -- 大数据和机器学习在气象预报中的应用_哔哩哔哩_bilibili...
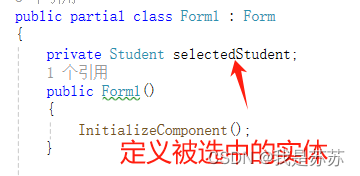
C#高级:Winform桌面开发中DataGridView的详解
一、每条数据增加一个按钮,点击输出对应实体 请先确保正确添加实体的名称和文本: private void button6_Click(object sender, EventArgs e) {//SQL查询到数据,存于list中List<InforMessage> list bll.QueryInforMessage();//含有字段…...
java八股文复习-----2024/03/05----基础---反射,动态代理。序列化
来源一 大彬八股文 来源二 2023 20W字八股文 2024秋招八股文 1.Java创建对象有几种方式? Java创建对象有以下几种方式: 用new语句创建对象。使用反射,使用Class.newInstance()创建对象。调用对象的clone()方法。运用反序列化手段&#x…...

【人工智能】Anthropic发布强大的Claude3对齐GPT-4,大模型杂谈个人感想
北京时间3月5日,人工智能创业公司Anthropic宣布,推出其突破性的Claude 3系列模型。Claude 3系列包含三个子模型,分别为Claude 3 Haiku、Claude 3 Sonnet和Claude 3 Opus,它们提供不同程度的智能、速度和成本选择,以满足…...

基于openKylin与RISC-V的MindSpore AI项目实践
项目目标: 在openKylin系统上安装和配置MindSpore框架。开发一个简单的图像分类模型,并在RISC-V平台上进行训练和推理。根据RISC-V的特性,对MindSpore框架进行必要的优化。 目录 项目目标: 训练模型 编写训练代码,设…...

【牛客】VL64 时钟切换
描述 题目描述: 存在两个同步的倍频时钟clk0 clk1,已知clk0是clk1的二倍频,现在要设计一个切换电路,sel选择时候进行切换,要求没有毛刺。 信号示意图: 波形示意图: 输入描述: clk0 clk1为时…...

Java设计模式——桥连模式
桥接模式简单来说就是通过将抽象部分和具体部分分离,使它们可以独立地变化。如果你的一个类存在多个变化维度(如抽象和具体的实现)。若使用继承来处理这些变化,将会导致类层次结构的急剧增加,难以管理和维护。并且&…...
数据结构与算法:堆排序和TOP-K问题
朋友们大家好,本节内容来到堆的应用:堆排序和topk问题 堆排序 1.堆排序的实现1.1排序 2.TOP-K问题3.向上调整建堆与向下调整建堆3.1对比两种方法的时间复杂度 我们在c语言中已经见到过几种排序,冒泡排序,快速排序(qsor…...

【NR 定位】3GPP NR Positioning 5G定位标准解读(三)
目录 前言 5 NG-RAN UE定位架构 5.1 架构 5.2 UE定位操作 5.3 NG-RAN定位操作 5.3.1 通用NG-RAN定位操作 5.3.2 OTDOA定位支持 5.3.3 广播辅助信息支持 5.3.4 NR RAT相关定位支持 5.4 NG-RAN中与UE定位相关的元素功能描述 5.4.1 用户设备(UE) …...

文件操作与IO(3) 文件内容的读写——数据流
目录 一、流的概念 二、字节流代码演示 1、InputStream read方法 第一个没有参数的版本: 第二个带有byte数组的版本: 第三个版本 搭配Scanner的使用 2、OutputStream write方法 第一个版本: 第二个写入整个数组版本: …...
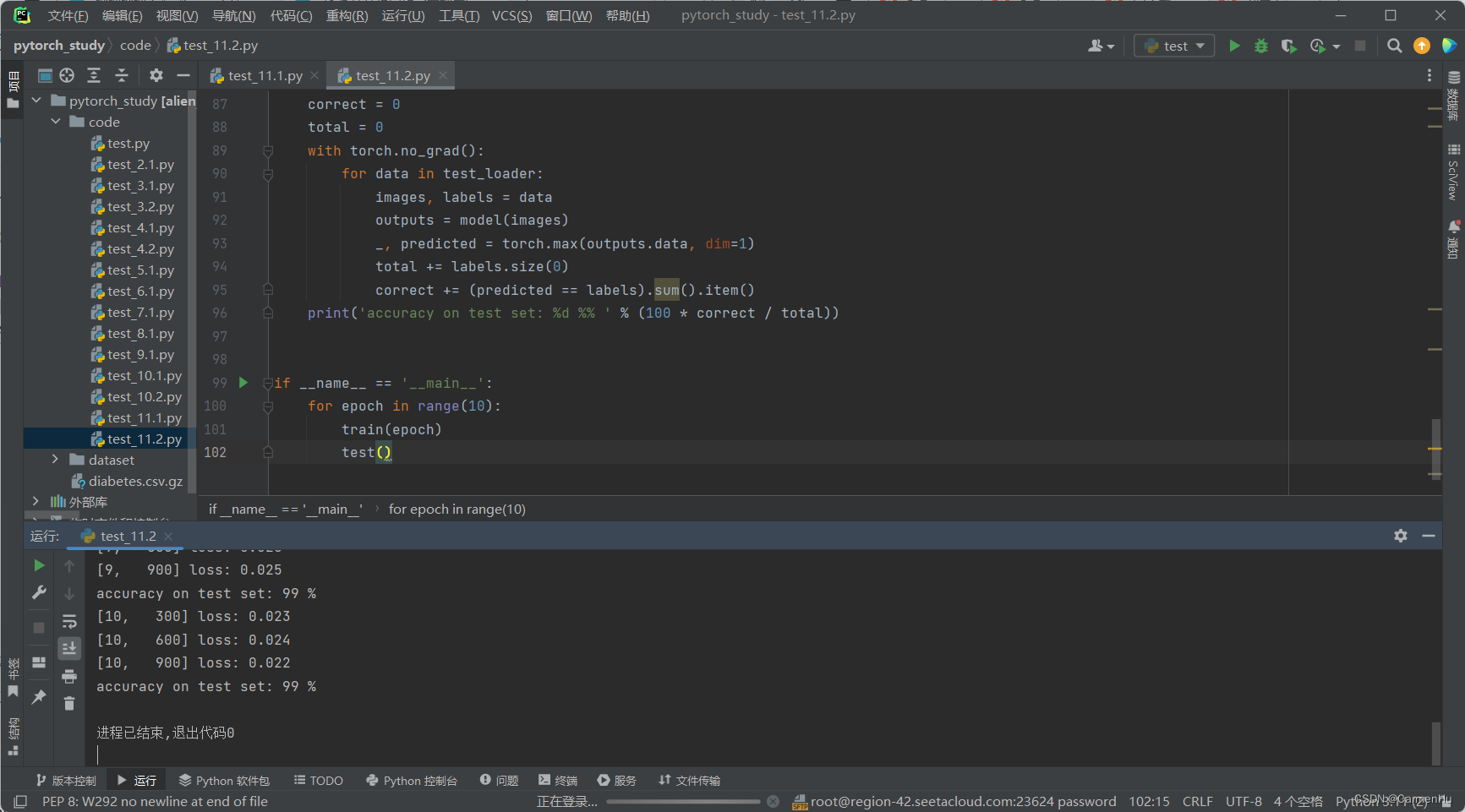
《PyTorch深度学习实践》第十一讲卷积神经网络进阶
一、 1、卷积核超参数选择困难,自动找到卷积的最佳组合。 2、1x1卷积核,不同通道的信息融合。使用1x1卷积核虽然参数量增加了,但是能够显著的降低计算量(operations) 3、Inception Moudel由4个分支组成,要分清哪些是在Init里定义…...

鸿蒙生鲜电商页面构建:果蔬配送模块的声明式UI实践
鸿蒙生鲜电商页面构建:果蔬配送模块的声明式UI实践 前言 在 HarmonyOS 6.0 应用开发中,生鲜电商类页面的核心挑战在于如何高效展示商品分类、秒杀活动和商品列表,同时保持视觉吸引力。本文将以“鲜选菜篮”生鲜配送应用的主页面为例ÿ…...

10分钟掌握XGBoost:机器学习竞赛的终极梯度提升库
10分钟掌握XGBoost:机器学习竞赛的终极梯度提升库 【免费下载链接】xgboost Scalable, Portable and Distributed Gradient Boosting (GBDT, GBRT or GBM) Library, for Python, R, Java, Scala, C and more. Runs on single machine, Hadoop, Spark, Dask, Flink a…...

蒙古语TTS准确率仅73%?ElevenLabs 2024Q2基准测试报告曝光:词级准确率91.4%,但需绕过这2个API默认参数坑
更多请点击: https://codechina.net 第一章:蒙古语TTS准确率争议的真相还原 近年来,多款商用及开源蒙古语文本转语音(TTS)系统在公开评测中报告了92%–97%的词级准确率,但一线教育机构与本地化团队反馈的实…...

性价比高的卫浴软件供应商
在卫浴行业数字化转型浪潮中,蓝猿BLUEAPE大力投入AI建设,其成果融入产品,为企业带来高效解决方案。降低成本,提升效率蓝猿云册多端同步,省略传统纸质画册印刷等环节,降低样品制作与分发成本,某卫…...

什么样的落地灯对小孩看书好?家长首选落地灯推荐清单,优选品质
选护眼大路灯这事吧,我以前也踩过坑:有的灯亮是亮,但眩光明显,盯久了眼睛就发干;还有的调亮度很难掌控,忽明忽暗看着就累。所以我比较在意什么样的落地灯对小孩看书好?下面给大家挑了5款口碑不错…...

罗技鼠标宏逆向工程:PUBG后坐力补偿系统的架构设计与实现
罗技鼠标宏逆向工程:PUBG后坐力补偿系统的架构设计与实现 【免费下载链接】logitech-pubg PUBG no recoil script for Logitech gaming mouse / 绝地求生 罗技 鼠标宏 项目地址: https://gitcode.com/gh_mirrors/lo/logitech-pubg 在竞技射击游戏中ÿ…...

长期使用Taotoken Token Plan套餐的成本节省实际感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Taotoken Token Plan套餐的成本节省实际感受 1. 从按量付费到套餐订阅的转变 我们团队在接入大模型API进行日常开发与内容…...

多模型选型与成本对比在Taotoken模型广场轻松完成
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 多模型选型与成本对比在Taotoken模型广场轻松完成 对于开发者而言,选择合适的模型并控制调用成本是接入大模型服务时的…...

终极LuaJIT反编译指南:如何快速恢复丢失的Lua源代码
终极LuaJIT反编译指南:如何快速恢复丢失的Lua源代码 【免费下载链接】luajit-decompiler https://gitlab.com/znixian/luajit-decompiler 项目地址: https://gitcode.com/gh_mirrors/lu/luajit-decompiler 你是否曾面对编译后的LuaJIT字节码文件束手无策&…...

地质建模革命:如何使用GemPy在10分钟内构建专业3D地质模型 [特殊字符]
地质建模革命:如何使用GemPy在10分钟内构建专业3D地质模型 🚀 【免费下载链接】gempy GemPy is an open-source, Python-based 3-D structural geological modeling software, which allows the implicit (i.e. automatic) creation of complex geologic…...