基于openKylin与RISC-V的MindSpore AI项目实践
项目目标:
- 在openKylin系统上安装和配置MindSpore框架。
- 开发一个简单的图像分类模型,并在RISC-V平台上进行训练和推理。
- 根据RISC-V的特性,对MindSpore框架进行必要的优化。
目录
项目目标:
训练模型
编写训练代码,设置优化器、损失函数等,并开始训练模型。
模型推理
在模型训练完成后,我们可以进行推理,即使用训练好的模型对新的图像进行分类。首先,我们需要加载训练好的模型参数,然后将这些参数加载到我们的模型中。
针对RISC-V优化
部署与测试
总结:

步骤一:安装MindSpore
- 首先,我们需要在openKylin系统上安装MindSpore。
- 请参照MindSpore官方文档,根据openKylin系统的特性进行安装。--MindSpore官方文档
步骤二:准备数据集
- 选择一个适合图像分类的数据集,如MNIST或CIFAR-10。下载数据集,并将其预处理为MindSpore可以识别的格式。

(没有的开发者们可以找我哦)
步骤三:编写模型代码
- 使用MindSpore编写一个简单的卷积神经网络(CNN)模型,用于图像分类。
import mindspore.nn as nn
from mindspore import Tensor
from mindspore.ops import operations as P class SimpleCNN(nn.Cell): def __init__(self, num_classes=10): super(SimpleCNN, self).__init__() self.conv1 = nn.Conv2d(3, 32, 3, pad_mode='same') self.relu1 = nn.ReLU() self.max_pool1 = nn.MaxPool2d(kernel_size=2, stride=2) self.conv2 = nn.Conv2d(32, 64, 3, pad_mode='same') self.relu2 = nn.ReLU() self.max_pool2 = nn.MaxPool2d(kernel_size=2, stride=2) self.flatten = nn.Flatten() self.fc1 = nn.Dense(64 * 7 * 7, 128) self.relu3 = nn.ReLU() self.fc2 = nn.Dense(128, num_classes) def construct(self, x): x = self.conv1(x) x = self.relu1(x) x = self.max_pool1(x) x = self.conv2(x) x = self.relu2(x) x = self.max_pool2(x) x = self.flatten(x) x = self.fc1(x) x = self.relu3(x) x = self.fc2(x) return x # 实例化模型
model = SimpleCNN()-
训练模型
-
编写训练代码,设置优化器、损失函数等,并开始训练模型。
from mindspore import context
from mindspore.train.callback import ModelCheckpoint, CheckpointConfig, LossMonitor
from mindspore.train.loss_scale_manager import FixedLossScaleManager
from mindspore import Tensor
from mindspore.nn import SoftmaxCrossEntropyWithLogits
from mindspore.train import Model # 设置上下文环境
context.set_context(mode=context.GRAPH_MODE, device_target="CPU") # 创建数据加载器
# ... # 创建损失函数和优化器
criterion = SoftmaxCrossEntropyWithLogits(sparse=True, reduction="mean")
optimizer = nn.Momentum(model.trainable_params(), learning_rate=0.01, momentum=0.9) # 配置模型保存
config_ck = CheckpointConfig(save_checkpoint_steps=1000, keep_checkpoint_max=10)
ckpoint_cb = ModelCheckpoint(prefix="checkpoint_simplecnn", directory="./", config=config_ck) # 开始训练
model = Model(model, criterion, optimizer, metrics={"Accuracy": nn.Accuracy()}, loss_scale_manager=FixedLossScaleManager())
model.train(epoch_num, train_dataset, callbacks=[ckpoint_cb, LossMonitor(100)], dataset_sink_mode=True)-
模型推理
在模型训练完成后,我们可以进行推理,即使用训练好的模型对新的图像进行分类。首先,我们需要加载训练好的模型参数,然后将这些参数加载到我们的模型中。
# 加载模型参数
param_dict = load_checkpoint("./checkpoint_simplecnn-1_1000.ckpt")
load_param_into_net(model, param_dict) # 设置输入图像
# 假设我们有一个预处理后的图像tensor,名为'input_tensor',大小为[1, 3, 32, 32]
# input_tensor = ... # 使用模型进行推理
output = model(input_tensor) # 输出预测结果
predicted_class = output.asnumpy().argmax()
print(f"Predicted class: {predicted_class}")-
针对RISC-V优化
- RISC-V架构的优化可能涉及多个层面,包括算法层面的优化、框架层面的优化以及硬件层面的优化。这里,我们主要关注框架层面的优化。
- 算法优化:针对RISC-V的特点,如整数运算性能高、内存访问延迟大等,可以优化模型中的算法,减少浮点运算,利用RISC-V的整数运算优势。
- 内存访问优化:RISC-V的内存访问延迟可能较大,因此可以通过减少内存访问次数、优化内存访问模式(如使用缓存友好的数据结构)来减少延迟。
- 模型剪枝与量化:通过模型剪枝减少模型复杂度,通过量化减少模型大小并加速推理。
-
部署与测试
- 在openKylin系统上部署优化后的AI应用,并进行实际测试,确保应用能够稳定运行,并且性能达到预期。

总结:
通过上述步骤,我们展示了如何在openKylin系统上基于MindSpore框架开发并优化一个图像分类AI应用,并部署在RISC-V平台上进行推理。这个过程涉及了模型的构建、训练、推理以及针对特定硬件架构的优化,是AI应用在实际应用中不可或缺的一部分。
相关文章:
基于openKylin与RISC-V的MindSpore AI项目实践
项目目标: 在openKylin系统上安装和配置MindSpore框架。开发一个简单的图像分类模型,并在RISC-V平台上进行训练和推理。根据RISC-V的特性,对MindSpore框架进行必要的优化。 目录 项目目标: 训练模型 编写训练代码,设…...

【牛客】VL64 时钟切换
描述 题目描述: 存在两个同步的倍频时钟clk0 clk1,已知clk0是clk1的二倍频,现在要设计一个切换电路,sel选择时候进行切换,要求没有毛刺。 信号示意图: 波形示意图: 输入描述: clk0 clk1为时…...

Java设计模式——桥连模式
桥接模式简单来说就是通过将抽象部分和具体部分分离,使它们可以独立地变化。如果你的一个类存在多个变化维度(如抽象和具体的实现)。若使用继承来处理这些变化,将会导致类层次结构的急剧增加,难以管理和维护。并且&…...
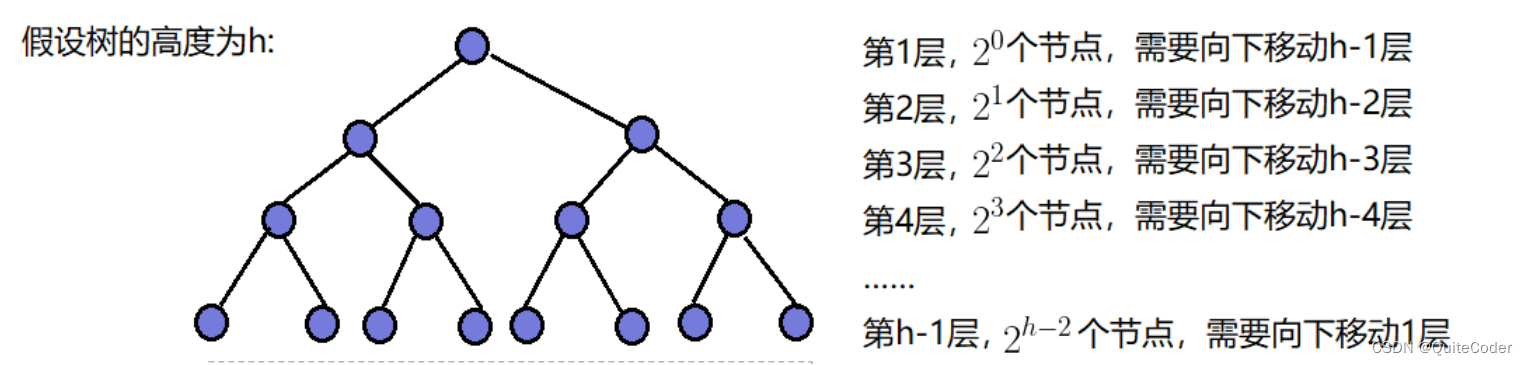
数据结构与算法:堆排序和TOP-K问题
朋友们大家好,本节内容来到堆的应用:堆排序和topk问题 堆排序 1.堆排序的实现1.1排序 2.TOP-K问题3.向上调整建堆与向下调整建堆3.1对比两种方法的时间复杂度 我们在c语言中已经见到过几种排序,冒泡排序,快速排序(qsor…...

【NR 定位】3GPP NR Positioning 5G定位标准解读(三)
目录 前言 5 NG-RAN UE定位架构 5.1 架构 5.2 UE定位操作 5.3 NG-RAN定位操作 5.3.1 通用NG-RAN定位操作 5.3.2 OTDOA定位支持 5.3.3 广播辅助信息支持 5.3.4 NR RAT相关定位支持 5.4 NG-RAN中与UE定位相关的元素功能描述 5.4.1 用户设备(UE) …...

文件操作与IO(3) 文件内容的读写——数据流
目录 一、流的概念 二、字节流代码演示 1、InputStream read方法 第一个没有参数的版本: 第二个带有byte数组的版本: 第三个版本 搭配Scanner的使用 2、OutputStream write方法 第一个版本: 第二个写入整个数组版本: …...
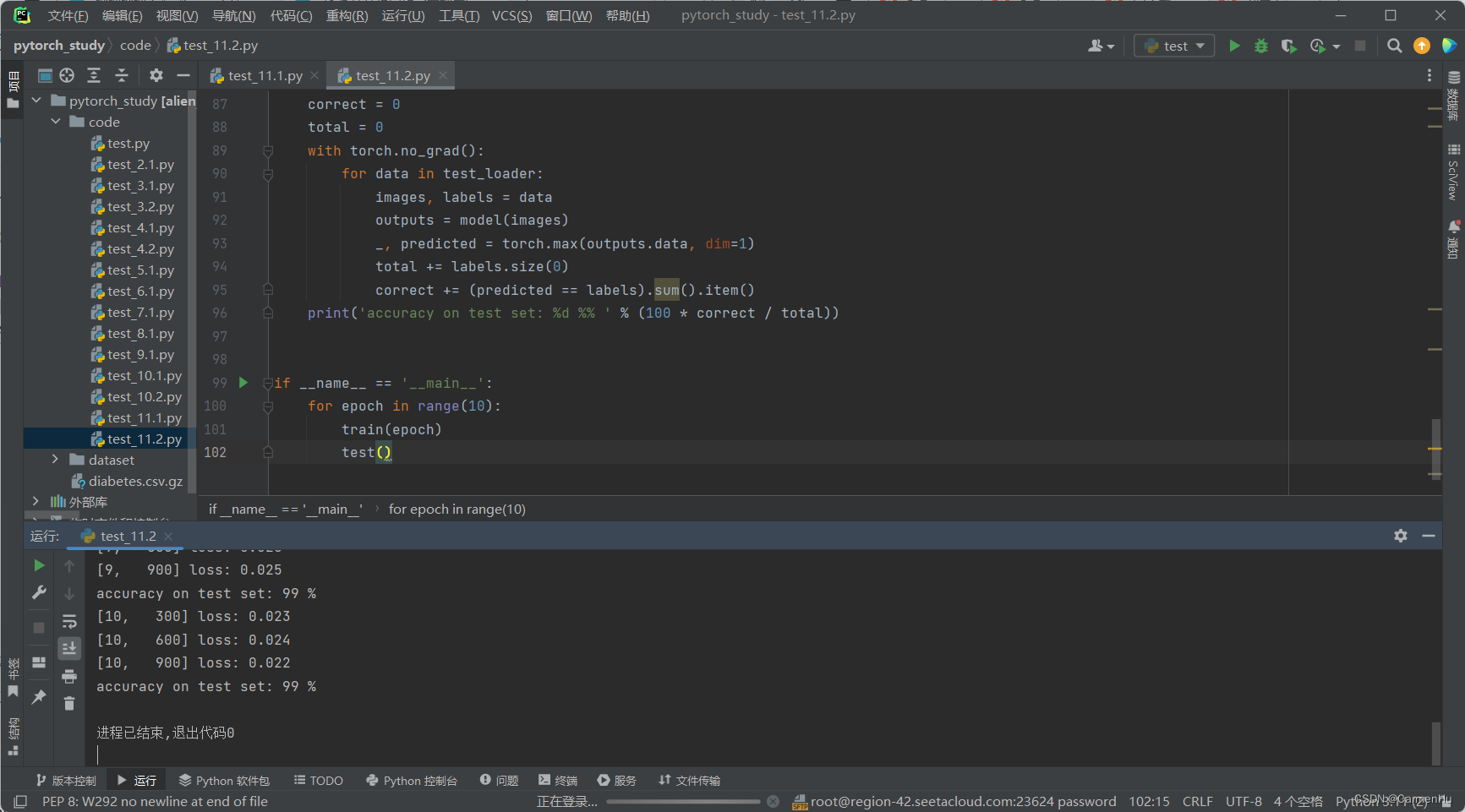
《PyTorch深度学习实践》第十一讲卷积神经网络进阶
一、 1、卷积核超参数选择困难,自动找到卷积的最佳组合。 2、1x1卷积核,不同通道的信息融合。使用1x1卷积核虽然参数量增加了,但是能够显著的降低计算量(operations) 3、Inception Moudel由4个分支组成,要分清哪些是在Init里定义…...

Ansible的playbook的编写和解析
目录 什么是playbook Ansible 的脚本 --- playbook 剧本 实例部署(使用playbook安装启动httpd服务) 1.编写一个.yaml文件 在主机下载安装http,将配置文件复制到opt目录下 运行playbook 在192.168.17.77主机上查看httpd服务是否成功开启…...

[环境配置]ssh连接报错“kex_exchange_identification: read: Connection reset by peer”
已经被VScode ssh毒死好几次了,都是执行命令意外中断,然后又VSCode里连不上、本机Terminal也连不上了。。。 重启远程服务器,VSCode可以连上了, 系统ssh还是不行,报错“kex_exchange_identification: read: Connecti…...
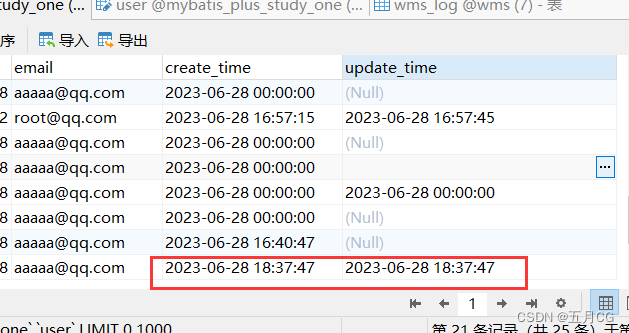
Mybatis-Plus——04,自动填充时间(新注解)
自动填充(新注解) 一、数据库添加两个字段二、实体类字段属性上增加注解三、编写填充器四、查看结果4.1 插入结果4.2 修改结果 五、同步修改5.1实体类属性改成 INSERT_UPDATE5.2 在填充器的方法这里加上 updateTime5.3 查看结果————————创作不易…...

【动态规划入门】最长上升子序列
每日一道算法题之最长上升子序列 一、题目描述二、思路三、C代码 一、题目描述 题目来源:LeetCode 给你一个整数数组 nums ,找到其中最长严格递增子序列的长度。 输入格式 第一行包含整数 N。 第二行包含 N个整数,表示完整序列。 输出格式 输出一个整数…...
LabVIEW眼结膜微血管采集管理系统
LabVIEW眼结膜微血管采集管理系统 开发一套基于LabVIEW的全自动眼结膜微血管采集管理系统,以提高眼结膜微血管临床研究的效率。系统集成了自动化图像采集、图像质量优化和规范化数据管理等功能,有效缩短了图像采集时间,提高了图像质量&#…...

通过GitHub探索Python爬虫技术
1.检索爬取内容案例。 2.找到最近更新的。(最新一般都可以直接运行) 3.选择适合自己的项目,目前测试下面画红圈的是可行的。 4.方便大家查看就把代码粘贴出来了。 #图中画圈一代码 import requests import os import rewhile True:music_id input("请输入歌曲…...
【Python】-----基础知识
注释 定义:让计算机跳过这个代码执行用三个单引号/双引号都表示注释信息,在Python中单引号与双引号没有区别,但必须是成对出现 输出与输入 程序是有开始,有结束的,程序运行规则:从上而下,由内…...
:点云处理相关开源算法库、软件、工具)
如何学习、上手点云算法(二):点云处理相关开源算法库、软件、工具
写在前面 本文内容 一些用于点云处理的开源算法库、软件介绍,主要包含: CloudCompare, MeshLab, PCL, Open3D, VTK, CGAL等 不定时更新 平台/环境 Windows10, Ubuntu1804, CMake, Open3D, PCL 转载请注明出处: https://blog.csdn.net/qq_41…...

为什么会对猫毛过敏?如何缓解?浮毛克星—宠物空气净化器推荐
猫咪过敏通常是因为它们身上的Fel d1蛋白质导致的,这些蛋白质附着在猫咪的皮屑上。猫咪舔毛的过程会带出这些蛋白质,一旦接触就可能引发过敏症状,比如打喷嚏等。因此,减少空气中的浮毛数量有助于减轻过敏现象。猫用空气净化器可以…...

Linux学习-etcdctl安装
etcdctl3.5下载链接 1. 先通过上面链接下载gz包2. 解压 [rootk8s-master ~]# tar xf etcd-v3.5.11-linux-amd64.tar.gz [rootk8s-master etcd-v3.5.11-linux-amd64]# ls Documentation etcd etcdctl etcdutl README-etcdctl.md README-etcdutl.md README.md READMEv2-e…...

Qt应用软件【文件篇】读写文件技巧
文章目录 简介按照偏移读文件按照偏移写文件Qt按行写文件Qt按行读文件注意事项指定文件编码格式UTF8转GBK简介 Qt提供了丰富的API来处理文件读写操作,使得读写文件变得简单。 按照偏移读文件 QFile file("example.txt"); if (file.open(QIODevice::ReadOnly)) {q…...

GO常量指针
Go语言中的常量使用关键字const定义,用于存储不会改变的数据,常量是在编译时被创建的,即使定义在函数内部也是如此,并且只能是布尔型、数字型(整数型、浮点型和复数)和字符串型。 由于编译时的限制&#x…...
微服务间通信重构与服务治理笔记
父工程 依赖版本管理,但实际不引入依赖 pom.xml <?xml version"1.0" encoding"UTF-8"?> <project xmlns"http://maven.apache.org/POM/4.0.0"xmlns:xsi"http://www.w3.org/2001/XMLSchema-instance"xsi:schemaLocation&…...

抖音无水印下载器:高效保存高清视频与图集的完整解决方案
抖音无水印下载器:高效保存高清视频与图集的完整解决方案 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback su…...

PS左边工具栏不见了?最全恢复解决教程
在使用Photoshop进行修图、设计操作时,左侧工具栏作为核心功能面板,承载着选区、绘画、修图等常用工具,一旦莫名消失,会直接中断操作、影响效率。很多新手遇到这种情况会手足无措,其实无需慌张,今天就给大家…...

SchemaCrawler:终极数据库模式发现与理解工具完全指南
SchemaCrawler:终极数据库模式发现与理解工具完全指南 【免费下载链接】SchemaCrawler Free database schema discovery and comprehension tool 项目地址: https://gitcode.com/gh_mirrors/sc/SchemaCrawler 在当今数据驱动的时代,数据库模式发现…...

水下叶轮脉动压力测试:Kulite压力传感器强在哪?安装门槛怎么破?
水下叶轮脉动压力测试这事,干过的朋友都懂——看着挺简单,上手哪一步都可能翻车。传感器防水、空间狭小、叶轮旋转、信号采集困难——随便拎出一个,都够让人头疼的。折腾了一圈,有一个型号被反复验证为绕不开的经典:Ku…...

文档下载神器kill-doc:如何一键拯救被平台困住的30+文档资源
文档下载神器kill-doc:如何一键拯救被平台困住的30文档资源 【免费下载链接】kill-doc 看到经常有小伙伴们需要下载一些免费文档,但是相关网站浏览体验不好各种广告,各种登录验证,需要很多步骤才能下载文档,该脚本就是…...

收藏 | LangChain vs LlamaIndex:大模型应用开发框架深度解析,小白也能轻松入门!
本文深入对比了LangChain和LlamaIndex两大框架的核心定位、功能模块及适用场景。LangChain是一个通用的LLM应用编排框架,通过LangGraph支持复杂Agent流程;LlamaIndex则专注于数据索引和检索,提供丰富的数据连接器和索引类型。文章还介绍了如何…...

通过TaotokenCLI工具一键配置多开发环境提升团队协作效率
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过Taotoken CLI工具一键配置多开发环境提升团队协作效率 在团队协作开发中,一个常见的挑战是确保所有成员都能快速、…...

罗技鼠标宏逆向工程:PUBG后坐力补偿系统的架构设计与实现
罗技鼠标宏逆向工程:PUBG后坐力补偿系统的架构设计与实现 【免费下载链接】logitech-pubg PUBG no recoil script for Logitech gaming mouse / 绝地求生 罗技 鼠标宏 项目地址: https://gitcode.com/gh_mirrors/lo/logitech-pubg 在竞技射击游戏中ÿ…...

网络编程入门 Python Socket 实现一个简单的用户认证系统
# Python Socket 实现一个简单的用户认证系统这次写的是一个简单的用户认证系统。整体思路是:1. 服务端负责保存和校验用户名、密码 2. 客户端负责输入用户名、密码 3. 客户端把用户输入的数据发送给服务端 4. 服务端判断用户名和密码是否正确 5. 服务端把登录结果返…...

宇视云团队模式访客预约操作流程
宇视云团队模式访客预约操作流程 本文将从创建访客邀请、来访信息登记、线上审批操作到最终多种方式通行,为您提供一步步的详细图文说明,引导企业内部员工和外部来访人员轻松上手,让访客接待更高效、更安全。 第一步:受访者创建“…...