STM32各外设初始化步骤
1、GPIO初始化步骤
1、使能GPIO时钟
2、初始化GPIO的输入/输出模式
3、设置GPIO的输出值或获取GPIO的输入值
GPIO_InitTypeDef GPIO_InitStruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_2MHz;GPIO_Init(GPIOA,&GPIO_InitStruct);2、EXTI的初始化步骤
1、使能EXTI线所在的GPIO时钟和AFIO复用时钟
2、初始化EXTI线所在的GPIO的输入输出模式
3、将GPIO脚映射到对应的EXTI线上
4、设置NVIC优先级分组,初始化NVIC
5、初始化EXTI
GPIO_InitTypeDef GPIO_InitStruct;EXTI_InitTypeDef EXTI_InitStruct;NVIC_InitTypeDef NVIC_InitStruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_2MHz;GPIO_Init(GPIOA,&GPIO_InitStruct);GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_Pin_1);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);NVIC_InitStruct.NVIC_IRQChannel = EXTI1_IRQn;NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStruct);EXTI_InitStruct.EXTI_Line = EXTI_Line1;EXTI_InitStruct.EXTI_LineCmd = ENABLE;EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising;EXTI_Init(&EXTI_InitStruct);3、USART的初始化步骤
1、使能USARTx的时钟和USARTx输入输出所用的GPIO时钟
2、将USART使用的GPIO引脚初始化为复用推挽(输出)和浮空输入模式
3、初始化USARTx,设置各种属性
4、如果需要中断,则开启串口中断
5、如果设置了USART中断,则需要设置NVIC优先级分组并且初始化NVIC
6、使能USARTx
GPIO_InitTypeDef GPIO_InitStruct;USART_InitTypeDef USART_InitStruct;NVIC_InitTypeDef NVIC_InitStruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStruct); GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStruct); USART_InitStruct.USART_BaudRate = 115200;USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;USART_InitStruct.USART_Parity = USART_Parity_No;USART_InitStruct.USART_StopBits = USART_StopBits_1;USART_InitStruct.USART_WordLength = USART_WordLength_8b;USART_Init(USART1,&USART_InitStruct);USART_Cmd(USART1,ENABLE);USART_ITConfig(USART1,USART_IT_RXNE,ENABLE); //中断接收NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStruct);void USART1_IRQHandler(void){//中断处理函数}4、通用定时器TIM定时中断的初始化步骤
1、使能定时时钟
2、初始化时基单元
3、开启定时器中断
4、配置NVIC:优先级分钟及NVIC初始化
5、使能定时器
6、编写定时中断函数
计数初值计算公式:计数器在CK_CNT的驱动下,计下一个数的时间为CK_CLK的倒数,即1 / (TIMxCLK / (PSC + 1));从开始计数到溢出期间计数器加1的个数为ARR + 1。(TIMxCLK:定时器时钟频率,默认等于系统时钟频率)
计数器计数频率 CK_CNT = TIMxCLK / (PSC + 1)
计数器溢出频率 CK_CNT_OV = CK_CNT / (ARR + 1)
= TIMxCLK / (PSC + 1) / (ARR + 1)
time(溢出时间) = ARR + 1 /TIMxCLK/ PSC + 1
以100ms,系统时钟为72MHZ为例,计算ARR和PSC的值,带入公式可得。
(ARR + 1) X (PSC + 1) = 100 * 72 * 1000
得
(ARR + 1) X (PSC + 1) = 1000 * 7200
这样可得多种组合,如ARR = 999 ; PSC = 7199。
//以100ms为例配置TIM定时中断TIM_TimeBaseInitTypeDef TimeBaseInitStruct;NVIC_InitTypeDef NVIC_InitStruct;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);TimeBaseInitStruct.TIM_Period = 999 + 1; //自动重装值TimeBaseInitStruct.TIM_Prescaler = 7199 + 1; //预分频值TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分割TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; // TimeBaseInitStruct.TIM_RepetitionCounter = ; 重复计数值 pwm模式使用TIM_TimeBaseInit(TIM3,&TimeBaseInitStruct);TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除标志位,防止从1开始计数TIM_ITConfig(TIM3,ENABLE); //使能定时中断NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分钟NVIC_InitStruct.NVIC_IRQChannel = TIM3_IRQn;NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStruct);TIM_Cmd(TIM3,ENABLE);void TIM3_IRQHandler(void){if(TIM_GetFlagStatus(TIM3,TIM_IT_Update) != RESET) //判断更新中断是否发生{//业务代码TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除标志位}}5、通用定时器PWM输出初始化步骤
1、使能定时器时钟和相关GPIO的时钟
2、初始化GPIO为复用推挽输出
3、若将PWM输出脚重映射到某个IO脚时,需设置重映射并且使能AFIO时钟
4、时基单元初始化,配置ARR,PSC
5、输出比较OCx初始化
6、使能预装载寄存器
7、使能定时器
8、不断改变比较值CCRx(CCRx包含了装入当前捕获/比较x寄存器的值(预装载值)。),达到不同的占空比
以TIM2、TIM3为例输出变化的PWM波信号,输出到PB3、PB4、PB5引脚
PB3、PB4默认是JTAG功能,需使用引脚重映射关闭JTAG功能改为普通IO口
要在PB3、PB4、PB5输出PWM波需要使用TIM2_CH2的部分重映射1和TIM3_CH1和TIM3_CH2的部分重映射。
部分重映射和完全重映射:所谓部分重映射就是部分管脚和默认的是一样的,而部分管脚是重新映射到其他管脚,而完全重 映射就是所有管脚都重新映射到其他管脚。通俗一点讲就是一个IO口有多个管脚,有的IO口是所有的管脚全部连接到一个外设上,有的IO口是一部分管脚接在一个外设上,另一部分管脚接在另一个外设上。

PWM占空比公式: CCR / ARR + 1
PWM 频率: TIMxCLK / (PSC + 1) / (ARR + 1)
PWM分辩率:1 / (ARR + 1) 越小越好
可通过 TIM_SetComparex(TIM2,uint16_t Compare);设置CCRx的值
//频率1000HZ,占空比50%的PWMGPIO_InitTypeDef GPIO_InitStruct;TIM_TimeBaseInitTypeDef TimeBaseInitStruct;TIM_OCInitTypeDef TIM_OCInitStruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2 | RCC_APB1Periph_TIM3,ENABLE);//GPIO引脚重映射关闭JTAG功能和TIM功能GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2,ENABLE); //GPIO部分重映射GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStruct.GPIO_Pin = GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStruct);TimeBaseInitStruct.TIM_Period = 100 - 1;TimeBaseInitStruct.TIM_Prescaler = 720 - 1;TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInit(TIM2,&TimeBaseInitStruct);TIM_TimeBaseInit(TIM3,&TimeBaseInitStruct);TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStruct.TIM_Pulse = 50; //CCR的值TIM_OC1Init(TIM3,&TIM_OCInitStruct);TIM_OC2Init(TIM3,&TIM_OCInitStruct);TIM_OC2Init(TIM2,&TIM_OCInitStruct);TIM_Cmd(TIM2,ENABLE);TIM_Cmd(TIM3,ENABLE);void setPWM_Duty(uint16_t compare){TIM_SetCompare1(TIM2,compare);TIM_SetCompare1(TIM3,compare);}6、通用定时器输入捕获初始化步骤
1、使能定时器时钟和相关GPIO的时钟
2、初始化GPIO输入输出模式
3、初始化时基单元,设置ARR,PSC的值
4、初始化输入捕获通道
5、开启捕获中断
6、NVIC优先级分组和NVIC初始化
7、使能定时器
8、编写定时中断函数
以TIM3为例进行初始化
GPIO_InitTypeDef GPIO_InitStruct;TIM_TimeBaseInitTypeDef TimeBaseInitStruct;TIM_ICInitTypeDef TIM_ICInitStruct;NVIC_InitTypeDef NVIC_InitStruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStruct); TimeBaseInitStruct.TIM_Period = 0xFFFF; //取最大值保证计数连续TimeBaseInitStruct.TIM_Prescaler = 71; //sysclk = 72mhz 计数周期为1us TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInit(TIM3,&TimeBaseInitStruct);TIM_ICInitStruct.TIM_Channel = TIM_Channel_3;TIM_ICInitStruct.TIM_ICFilter = 0; //输入捕获筛选值TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI; //指定输入TIM_ICInit(TIM3,&TIM_ICInitStruct);TIM_ITConfig(TIM3,TIM_IT_CC3,ENABLE); NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitStruct.NVIC_IRQChannel = TIM3_IRQn;NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2;NVIC_InitStruct.NVIC_IRQChannelSubPriority = 2;NVIC_Init(&NVIC_InitStruct);TIM_Cmd(TIM3,ENABLE);7、I2C总线初始化步骤
1、开启 I2C时钟和I2C所在GPIO的时钟
2、初始化I2C所在的GPIOB为规定的开漏复用输出模式
3、I2C初始化,设置I2C通信的参数
4、使能I2C
GPIO_InitTypeDef GPIO_InitStruct;I2C_InitTypeDef I2C_InitStruct;RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//初始化GPIO PB6/SCL PB7/SDAGPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_OD;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStruct);//配置I2C为普通模式,主机I2C_InitStruct.I2C_Mode = I2C_Mode_I2C;I2C_InitStruct.I2C_OwnAddress1 = 0X45; //主机随意设置I2C_InitStruct.I2C_DutyCycle = I2C_DutyCycle_2;I2C_InitStruct.I2C_Ack = I2C_Ack_Enable;I2C_InitStruct.I2C_ClockSpeed = 4000;I2C_InitStruct.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;//应答地址,选择7位,从机模式下才有效I2C_Cmd(I2C1,ENABLE);//自动应答ACK使能,初始化时不是能,后面可以函数调用。I2C_AcknowledgeConfig(I2C1,ENABLE); 软件模拟I2C,by 江协科技
// @author 江协科技/*引脚配置层*//*** 函 数:I2C写SCL引脚电平* 参 数:BitValue 协议层传入的当前需要写入SCL的电平,范围0~1* 返 回 值:无* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SCL为低电平,当BitValue为1时,需要置SCL为高电平*/
void MyI2C_W_SCL(uint8_t BitValue)
{GPIO_WriteBit(GPIOB, GPIO_Pin_10, (BitAction)BitValue); //根据BitValue,设置SCL引脚的电平Delay_us(10); //延时10us,防止时序频率超过要求
}/*** 函 数:I2C写SDA引脚电平* 参 数:BitValue 协议层传入的当前需要写入SDA的电平,范围0~0xFF* 返 回 值:无* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SDA为低电平,当BitValue非0时,需要置SDA为高电平*/
void MyI2C_W_SDA(uint8_t BitValue)
{GPIO_WriteBit(GPIOB, GPIO_Pin_11, (BitAction)BitValue); //根据BitValue,设置SDA引脚的电平,BitValue要实现非0即1的特性Delay_us(10); //延时10us,防止时序频率超过要求
}/*** 函 数:I2C读SDA引脚电平* 参 数:无* 返 回 值:协议层需要得到的当前SDA的电平,范围0~1* 注意事项:此函数需要用户实现内容,当前SDA为低电平时,返回0,当前SDA为高电平时,返回1*/
uint8_t MyI2C_R_SDA(void)
{uint8_t BitValue;BitValue = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11); //读取SDA电平Delay_us(10); //延时10us,防止时序频率超过要求return BitValue; //返回SDA电平
}/*** 函 数:I2C初始化* 参 数:无* 返 回 值:无* 注意事项:此函数需要用户实现内容,实现SCL和SDA引脚的初始化*/
void MyI2C_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB10和PB11引脚初始化为开漏输出/*设置默认电平*/GPIO_SetBits(GPIOB, GPIO_Pin_10 | GPIO_Pin_11); //设置PB10和PB11引脚初始化后默认为高电平(释放总线状态)
}/*协议层*//*** 函 数:I2C起始* 参 数:无* 返 回 值:无*/
void MyI2C_Start(void)
{MyI2C_W_SDA(1); //释放SDA,确保SDA为高电平MyI2C_W_SCL(1); //释放SCL,确保SCL为高电平MyI2C_W_SDA(0); //在SCL高电平期间,拉低SDA,产生起始信号MyI2C_W_SCL(0); //起始后把SCL也拉低,即为了占用总线,也为了方便总线时序的拼接
}/*** 函 数:I2C终止* 参 数:无* 返 回 值:无*/
void MyI2C_Stop(void)
{MyI2C_W_SDA(0); //拉低SDA,确保SDA为低电平MyI2C_W_SCL(1); //释放SCL,使SCL呈现高电平MyI2C_W_SDA(1); //在SCL高电平期间,释放SDA,产生终止信号
}/*** 函 数:I2C发送一个字节* 参 数:Byte 要发送的一个字节数据,范围:0x00~0xFF* 返 回 值:无*/
void MyI2C_SendByte(uint8_t Byte)
{uint8_t i;for (i = 0; i < 8; i ++) //循环8次,主机依次发送数据的每一位{MyI2C_W_SDA(Byte & (0x80 >> i)); //使用掩码的方式取出Byte的指定一位数据并写入到SDA线MyI2C_W_SCL(1); //释放SCL,从机在SCL高电平期间读取SDAMyI2C_W_SCL(0); //拉低SCL,主机开始发送下一位数据}
}/*** 函 数:I2C接收一个字节* 参 数:无* 返 回 值:接收到的一个字节数据,范围:0x00~0xFF*/
uint8_t MyI2C_ReceiveByte(void)
{uint8_t i, Byte = 0x00; //定义接收的数据,并赋初值0x00,此处必须赋初值0x00,后面会用到MyI2C_W_SDA(1); //接收前,主机先确保释放SDA,避免干扰从机的数据发送for (i = 0; i < 8; i ++) //循环8次,主机依次接收数据的每一位{MyI2C_W_SCL(1); //释放SCL,主机机在SCL高电平期间读取SDAif (MyI2C_R_SDA() == 1){Byte |= (0x80 >> i);} //读取SDA数据,并存储到Byte变量//当SDA为1时,置变量指定位为1,当SDA为0时,不做处理,指定位为默认的初值0MyI2C_W_SCL(0); //拉低SCL,从机在SCL低电平期间写入SDA}return Byte; //返回接收到的一个字节数据
}/*** 函 数:I2C发送应答位* 参 数:Byte 要发送的应答位,范围:0~1,0表示应答,1表示非应答* 返 回 值:无*/
void MyI2C_SendAck(uint8_t AckBit)
{MyI2C_W_SDA(AckBit); //主机把应答位数据放到SDA线MyI2C_W_SCL(1); //释放SCL,从机在SCL高电平期间,读取应答位MyI2C_W_SCL(0); //拉低SCL,开始下一个时序模块
}/*** 函 数:I2C接收应答位* 参 数:无* 返 回 值:接收到的应答位,范围:0~1,0表示应答,1表示非应答*/
uint8_t MyI2C_ReceiveAck(void)
{uint8_t AckBit; //定义应答位变量MyI2C_W_SDA(1); //接收前,主机先确保释放SDA,避免干扰从机的数据发送MyI2C_W_SCL(1); //释放SCL,主机机在SCL高电平期间读取SDAAckBit = MyI2C_R_SDA(); //将应答位存储到变量里MyI2C_W_SCL(0); //拉低SCL,开始下一个时序模块return AckBit; //返回定义应答位变量
}
8、DMA数据搬运初始化
MyDMA_Size = Size; //将Size写入到全局变量,记住参数Size/*开启时钟*/RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); //开启DMA的时钟/*DMA初始化*/DMA_InitTypeDef DMA_InitStructure; //定义结构体变量DMA_InitStructure.DMA_PeripheralBaseAddr = AddrA; //外设基地址,给定形参AddrADMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; //外设数据宽度,选择字节DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Enable; //外设地址自增,选择使能DMA_InitStructure.DMA_MemoryBaseAddr = AddrB; //存储器基地址,给定形参AddrBDMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte; //存储器数据宽度,选择字节DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //存储器地址自增,选择使能DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; //数据传输方向,选择由外设到存储器DMA_InitStructure.DMA_BufferSize = Size; //转运的数据大小(转运次数)DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; //模式,选择正常模式DMA_InitStructure.DMA_M2M = DMA_M2M_Enable; //存储器到存储器,选择使能DMA_InitStructure.DMA_Priority = DMA_Priority_Medium; //优先级,选择中等DMA_Init(DMA1_Channel1, &DMA_InitStructure); //将结构体变量交给DMA_Init,配置DMA1的通道1/*DMA使能*/DMA_Cmd(DMA1_Channel1, DISABLE); //这里先不给使能,初始化后不会立刻工作,等后续调用Transfer后,再开始//以下为搬运时配置DMA_Cmd(DMA1_Channel1, DISABLE); //DMA失能,在写入传输计数器之前,需要DMA暂停工作DMA_SetCurrDataCounter(DMA1_Channel1, MyDMA_Size); //写入传输计数器,指定将要转运的次数DMA_Cmd(DMA1_Channel1, ENABLE); //DMA使能,开始工作while (DMA_GetFlagStatus(DMA1_FLAG_TC1) == RESET); //等待DMA工作完成DMA_ClearFlag(DMA1_FLAG_TC1); //清除工作完成标志位9、AD单通道初始化
void AD_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE); //开启ADC1的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*设置ADC时钟*/RCC_ADCCLKConfig(RCC_PCLK2_Div6); //选择时钟6分频,ADCCLK = 72MHz / 6 = 12MHz/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0引脚初始化为模拟输入/*规则组通道配置*/ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_55Cycles5); //规则组序列1的位置,配置为通道0/*ADC初始化*/ADC_InitTypeDef ADC_InitStructure; //定义结构体变量ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //模式,选择独立模式,即单独使用ADC1ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //数据对齐,选择右对齐ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //外部触发,使用软件触发,不需要外部触发ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //连续转换,失能,每转换一次规则组序列后停止ADC_InitStructure.ADC_ScanConvMode = DISABLE; //扫描模式,失能,只转换规则组的序列1这一个位置ADC_InitStructure.ADC_NbrOfChannel = 1; //通道数,为1,仅在扫描模式下,才需要指定大于1的数,在非扫描模式下,只能是1ADC_Init(ADC1, &ADC_InitStructure); //将结构体变量交给ADC_Init,配置ADC1/*ADC使能*/ADC_Cmd(ADC1, ENABLE); //使能ADC1,ADC开始运行/*ADC校准*/ADC_ResetCalibration(ADC1); //固定流程,内部有电路会自动执行校准while (ADC_GetResetCalibrationStatus(ADC1) == SET);ADC_StartCalibration(ADC1);while (ADC_GetCalibrationStatus(ADC1) == SET);
}/*** 函 数:获取AD转换的值* 参 数:无* 返 回 值:AD转换的值,范围:0~4095*/
uint16_t AD_GetValue(void)
{ADC_SoftwareStartConvCmd(ADC1, ENABLE); //软件触发AD转换一次while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); //等待EOC标志位,即等待AD转换结束return ADC_GetConversionValue(ADC1); //读数据寄存器,得到AD转换的结果
}10、AD多通道初始化
void AD_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE); //开启ADC1的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*设置ADC时钟*/RCC_ADCCLKConfig(RCC_PCLK2_Div6); //选择时钟6分频,ADCCLK = 72MHz / 6 = 12MHz/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0、PA1、PA2和PA3引脚初始化为模拟输入/*不在此处配置规则组序列,而是在每次AD转换前配置,这样可以灵活更改AD转换的通道*//*ADC初始化*/ADC_InitTypeDef ADC_InitStructure; //定义结构体变量ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //模式,选择独立模式,即单独使用ADC1ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //数据对齐,选择右对齐ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //外部触发,使用软件触发,不需要外部触发ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //连续转换,失能,每转换一次规则组序列后停止ADC_InitStructure.ADC_ScanConvMode = DISABLE; //扫描模式,失能,只转换规则组的序列1这一个位置ADC_InitStructure.ADC_NbrOfChannel = 1; //通道数,为1,仅在扫描模式下,才需要指定大于1的数,在非扫描模式下,只能是1ADC_Init(ADC1, &ADC_InitStructure); //将结构体变量交给ADC_Init,配置ADC1/*ADC使能*/ADC_Cmd(ADC1, ENABLE); //使能ADC1,ADC开始运行/*ADC校准*/ADC_ResetCalibration(ADC1); //固定流程,内部有电路会自动执行校准while (ADC_GetResetCalibrationStatus(ADC1) == SET);ADC_StartCalibration(ADC1);while (ADC_GetCalibrationStatus(ADC1) == SET);
}/*** 函 数:获取AD转换的值* 参 数:ADC_Channel 指定AD转换的通道,范围:ADC_Channel_x,其中x可以是0/1/2/3* 返 回 值:AD转换的值,范围:0~4095*/
uint16_t AD_GetValue(uint8_t ADC_Channel)
{ADC_RegularChannelConfig(ADC1, ADC_Channel, 1, ADC_SampleTime_55Cycles5); //在每次转换前,根据函数形参灵活更改规则组的通道1ADC_SoftwareStartConvCmd(ADC1, ENABLE); //软件触发AD转换一次while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); //等待EOC标志位,即等待AD转换结束return ADC_GetConversionValue(ADC1); //读数据寄存器,得到AD转换的结果
}
相关文章:
STM32各外设初始化步骤
1、GPIO初始化步骤 1、使能GPIO时钟 2、初始化GPIO的输入/输出模式 3、设置GPIO的输出值或获取GPIO的输入值 GPIO_InitTypeDef GPIO_InitStruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitStruct.GPIO_Mode GPIO_Mode_Out_PP; GPIO_InitStruct.GPIO_Pin…...

10. Nginx进阶-Return
简介 什么是Return? nginx的return指令是用于在nginx配置文件中进行重定向或返回特定的HTTP响应码的指令。 它可以根据不同的条件来执行不同的操作,如重定向到其他URL、返回指定的HTTP响应码或自定义响应内容等。 Return适用范围 return指令只能在se…...
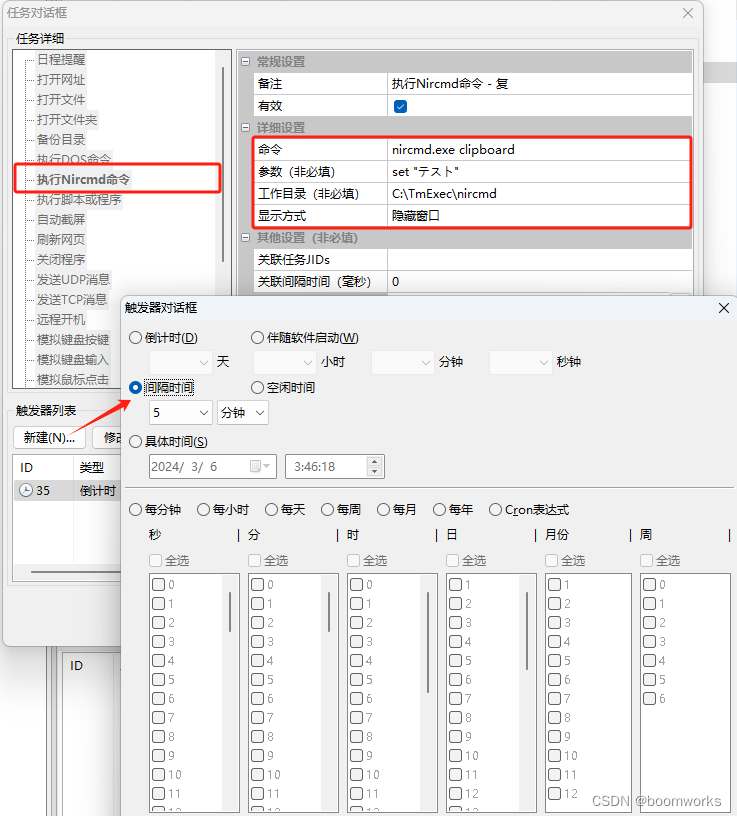
Nircmd集成定时执行专家之后的使用场景
Nircmd工具拥有了定时执行功能之后,可以用于以下场景: 1. 自动化日常工作 定时清理系统垃圾文件定时备份重要文件定时关闭或重启电脑定时发送邮件或短信定时执行其他程序或脚本 2. 监控系统状态 定时检查系统温度定时检查磁盘空间定时检查网络连接定时…...
)
Java面试题【必知必会】Linux常用命令面试题(2024)
近期一直在准备面试,所以为了巩固知识,也为了梳理,整理了一些java的基础面试题!同时也希望各位英雄和女侠能够补充!不胜荣幸!!! 名称地址Java面试题【必知必会】基础(202…...

元宇宙融合多功能气膜馆:开启娱乐与文化的数字新纪元
多功能气膜馆和元宇宙的结合,标志着娱乐和文化领域进入了全新的时代。元宇宙作为数字化空间的前沿概念,正在逐渐渗透到人们的日常生活中。而多功能气膜馆作为一种创新的场馆模式,则为人们提供了更为丰富多彩的娱乐和文化体验。这种融合不仅将…...
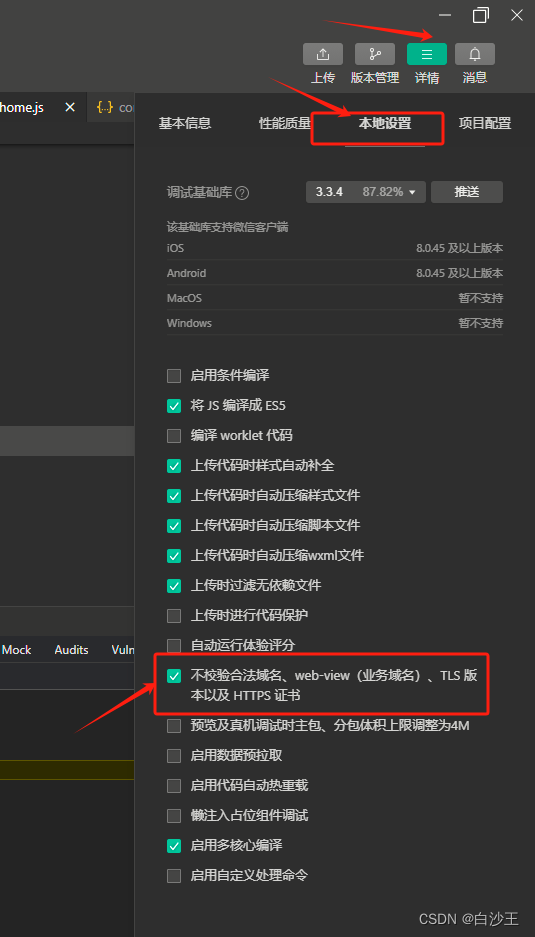
微信小程序本地开发
微信小程序本地开发时不需要在小程序后台配置服务器域名直接在小程序项目中填写后端在本机的IP地址和端口号 如图(第一步) 填写地址后发现报错,url不是合法域名,则在详情设置不校验合法域名 如图(第二歩)…...

2024火爆全网系列,原来RocketMQ中间件可以这么玩
前言 做了 3~5 年编程开发,你已经积累了不少项目经验,扩宽了技术广度,也许已发力成为团队管理者。到了这个阶段,大家却常有这种感受:感觉自己卡在瓶颈进步缓慢,技术水平很难像早期一样实现大幅突破&#x…...

2024阿里、网易、京东等大厂最新Java面试题,一举拿下腾讯美团滴滴offer
前言 一位小伙伴准备了许久的阿里Java面试,原以为能够顺利拿下offer,但在第三面还是被摁在地上反复摩擦,丧气一段时间后,小伙伴调整了心态重新尝试了一下,最终拿下了offer,今天小编把这位小伙伴遇到的面试…...
)
我的创作纪念日(2024.3.6)
机缘 从2020.10.11号进入博客,刚开始我只是把博客当作类似于微博的网站,用的比较少,后来到公司之后,开始使用博客进行做笔记,把工作上遇到的问题都记录下来,这样后面再遇到同样的问题就可以通过自己以前做…...
)
SpringBoot实战(1)
SpringBoot总结 一,Spring 设计思想 OOP: 面向对象编程-》封装、继承、多态 BOP: 面向Bean编程-》一切从Bean开始 AOP: 面向切面编程-》解藕、专 人做专事 IOC: 控制反转,将new 对象的操作交给Spring统一管理-》转交控制权 DI/DL: 依赖注入/依赖查找-》自动赋值 DI和AOP…...
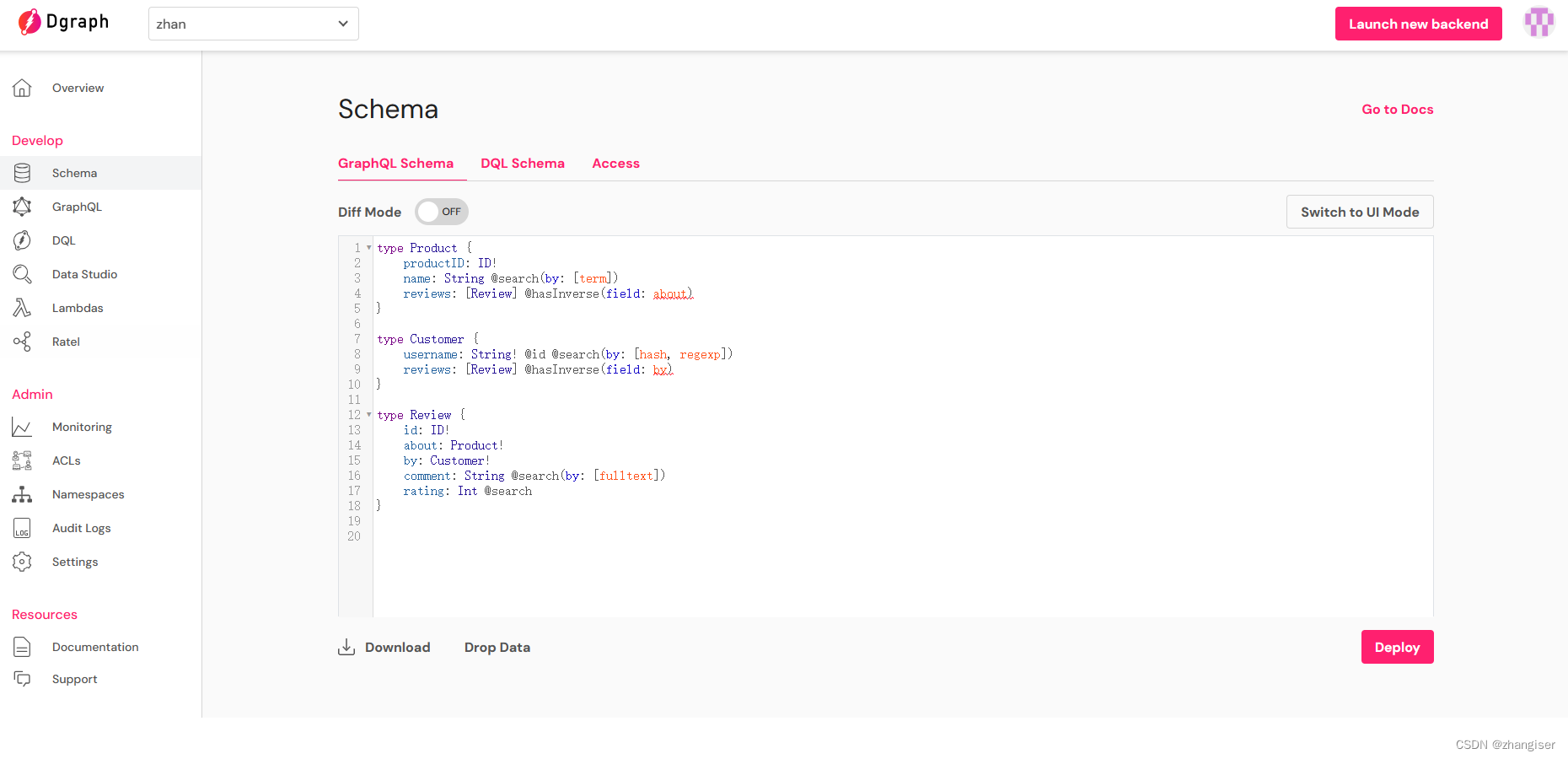
Dgraph 入门教程二《 快速开始》
1、Clound 云 云地址:Dgraph Cloud 登录Clound 云后,可以用云上的东西操作,可以用谷歌账号或者github账号登录。 启动云 (1)在云控制台,点击 Launch new backend. (2)选择计划&…...
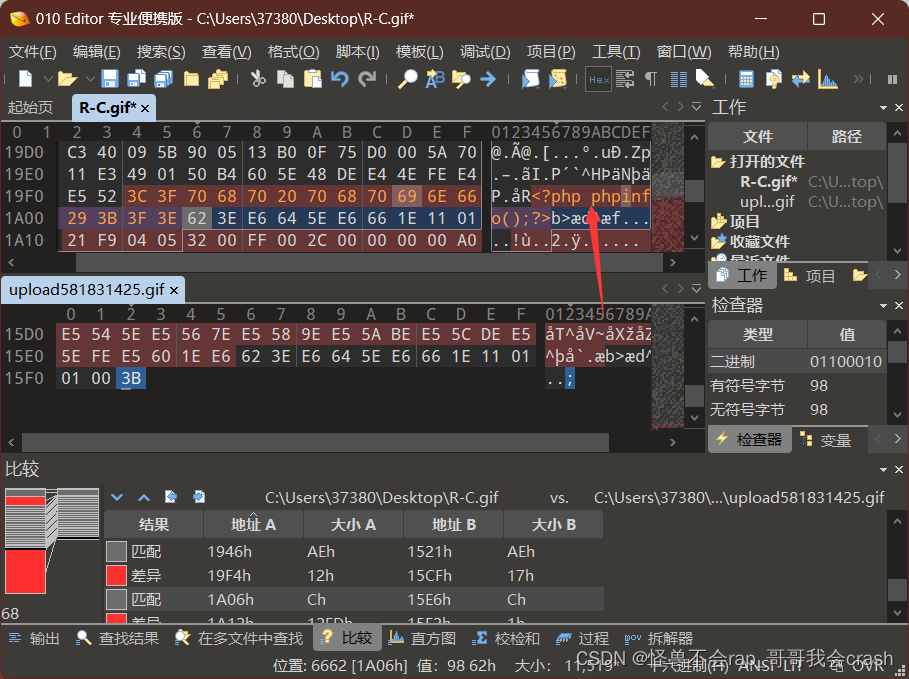
文件上传{session文件包含以及条件竞争、图片文件渲染绕过(gif、png、jpg)}
session文件包含以及条件竞争 条件: 知道session文件存储在哪里 一般的默认位置: /var/lib/php/sess_PHPSESSID /var/lib/php/sessions/sess_PHPSESSID /tmp/sess_PHPSESSID /tmp/sessions/sess_PHPSESSID ####在没做过设置的情况下一般都是存储在/var…...

【论文精读】Mask R-CNN
摘要 基于Faster RCNN,做出如下改变: 添加了用于预测每个感兴趣区域(RoI)上的分割掩码分支,与用于分类和边界框回归的分支并行。mask分支是一个应用于每个RoI的FCN,以像素到像素的方式预测分割掩码,只增加了很小的计…...

vue + js 项目打包JS、CSS文件自动部署到oss
一、下载oss依赖 npm install webpack-aliyun-oss 或 yarn add webpack-aliyun-oss 二、在vue.config.js中配置文件 const WebpackAliyunOss require("webpack-aliyun-oss");let VUE_APP_BUCKET "xxx"; let VUE_APP_REGION "xx-xxx-xxx";m…...

CSS:让动画流畅生动的缓动函数
在CSS中,可以使用transition属性或者keyframes关键帧动画来创建动画效果。 使用缓动函数则可以让动画更加流畅和生动。 div {transition: <property> <duration> <timing-function> <delay>; }div {animation: <keyframes-name> &l…...
蓝桥杯集训·每日一题2024 (差分)
前言: 差分笔记以前就做了,在这我就不再写一遍了,直接上例题。 例题: #include<bits/stdc.h> using namespace std; int a[10009],b[100009]; int main(){int n,ans10,ans20;cin>>n;for(int i1;i<n;i){cin>>…...
)
嵌入式通信数据经常说的大端和小端模式(学习)
一.概念 大端模式(Big-endian):高位字节排放在内存的低地址端,低位字节排放在内存的高地址端,即正序排列,高尾端; 小端模式(Little-endian):低位字节排放在…...
bun 单元测试
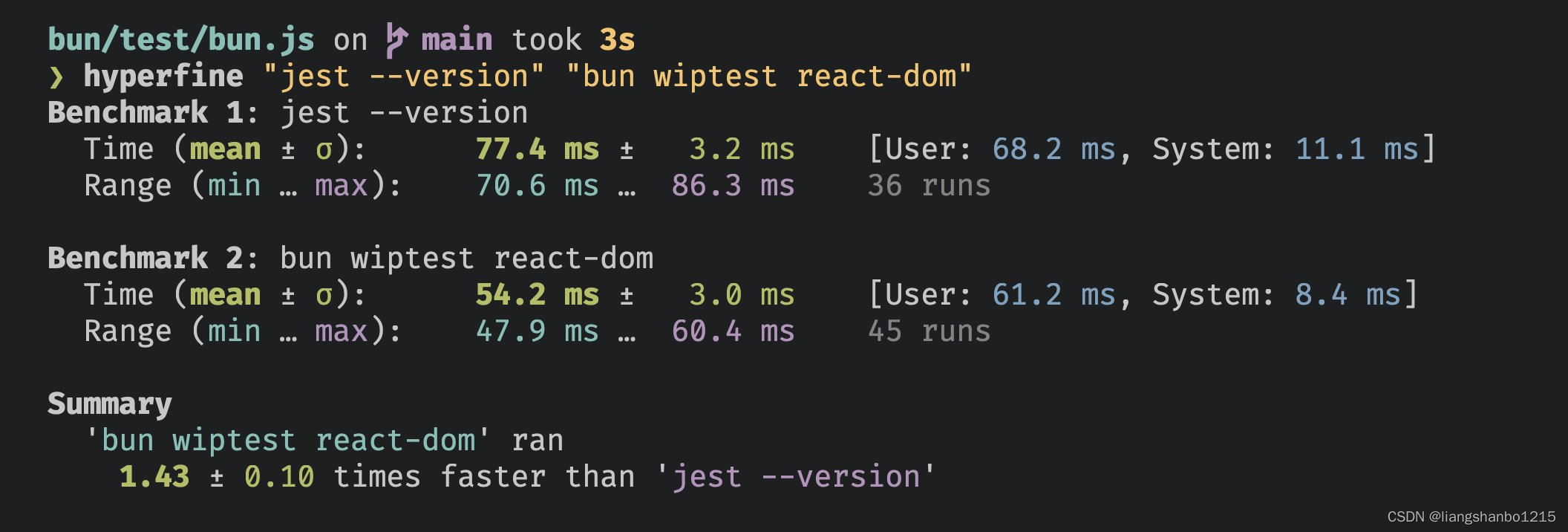
bun test Bun 附带了一个快速、内置、兼容 Jest 的测试运行程序。测试使用 Bun 运行时执行,并支持以下功能。 TypeScript 和 JSX生命周期 hooks快照测试UI 和 DOM 测试使用 --watch 的监视模式使用 --preload 预加载脚本 Bun 旨在与 Jest 兼容,但并非所…...

阿里云2核4G服务器支持多少人同时在线?
2核4G服务器支持多少人在线?阿里云服务器网账号下的2核4G服务器支持20人同时在线访问,然而应用不同、类型不同、程序效率不同实际并发数也不同,2核4G服务器的在线访问人数取决于多个变量因素: 2核4G:2核CPU和4G内存对…...
浏览器发出一个请求到收到响应步骤详解
前言 在网络通信中,浏览器向Web服务器发送HTTP请求消息的过程是一个复杂而精密的环节,涉及到URL解析、DNS解析、数据拆分、路由表规则和MAC头部添加等一系列步骤。本文将深入探讨这一过程的每个环节,帮助读者更全面地了解浏览器与Web服务器之…...

别再死记硬背GitFlow命令了!用SourceTree图形化工具5分钟搞定团队协作流程
告别GitFlow命令行恐惧:用SourceTree可视化工具高效管理团队协作 在中小型技术团队中,版本控制是日常开发不可或缺的环节,但传统的GitFlow工作流常常让非命令行爱好者望而生畏。当团队成员水平参差不齐时,频繁的git merge --no-ff…...

SaySo 语音识别相关技术解析,从语音输入到可用文本
摘要语音识别正在从一个独立功能,变成越来越多桌面应用里的基础交互能力。对于 SaySo 这类 PC 端语音工具来说,语音识别不仅仅是把声音转成文字,更关键的是如何在桌面工作流中做到识别准确、响应及时、体验稳定。本文将围绕 SaySo 的语音识别…...

cursor接入外部大模型教程!新手必看
一、接入前准备 在开始之前,请先登录你的大模型平台,这里使用 我自用的举例官网地址,创建并复制你的 API Key。 这里添加令牌,有名称和分组,简单举例,填入名称 cursor-claude, 一个key只能选一…...

抢先李飞飞!世界模型能多人联机玩FPS游戏了
Jay 发自 凹非寺量子位 | 公众号 QbitAI我被AI杀了?有视频为证,我被一个不知道是人还是AI的东西,一枪崩了。还是在一个世界模型创造的世界里。嗯,就是这个画质糊成马赛克的网页版FPS。背后没有游戏引擎,没有物理规则&a…...

Flyback电源里,为什么TVS管和二极管要‘组队’才能搞定电压尖峰?
Flyback电源中TVS管与二极管的协同钳位机制解析 在反激式(Flyback)电源设计中,初级侧的电压尖峰抑制一直是工程师面临的棘手问题。许多初学者会疑惑:为什么不能像继电器线圈保护那样,仅用单个二极管实现钳位?这个看似简单的疑问背…...

Go语言云原生开发:构建高可用微服务架构
Go语言云原生开发:构建高可用微服务架构 引言 云原生开发已成为现代应用开发的主流范式,Go语言凭借其轻量级、高性能和出色的并发支持,成为云原生开发的首选语言。本文将深入探讨Go语言在云原生环境中的应用,帮助您构建高可用的微…...

EMD vs NEMD:分子动力学算热导率,新手到底该选哪个?
EMD与NEMD方法实战指南:如何为你的热导率计算选择最佳方案 在纳米材料和新型功能材料的研究中,热导率的精确计算是理解材料热输运性能的关键。面对平衡态分子动力学(EMD)和非平衡态分子动力学(NEMD)两种主流方法,许多研究者常常陷入选择困境。…...

ARM P-Channel接口设计与低功耗SoC电源管理实践
1. ARM P-Channel接口深度解析在低功耗SoC设计中,电源管理接口的可靠性和时序一致性直接决定了系统的能效表现。ARM P-Channel作为专为电源管理设计的标准化接口协议,通过独特的四阶段握手机制,为设备与电源控制器之间建立了高效的状态协商通…...

告别Resources.Load!Unity动态加载材质资源的最佳实践与性能优化指南
Unity材质资源动态加载:从基础实现到架构级优化方案 在AR涂鸦、实时换装、用户自定义皮肤等现代游戏交互场景中,动态材质加载已成为核心需求。传统Resources.Load虽简单直接,但在大型项目中常引发资源管理混乱、内存泄漏和热更新障碍。本文将…...

Kubernetes 监控与可观测性深度解析:Prometheus + Grafana + Loki
Kubernetes 监控与可观测性深度解析:Prometheus Grafana Loki 引言 在云原生环境中,监控与可观测性是保障系统稳定运行的关键。Kubernetes 生态提供了丰富的监控工具,其中 Prometheus、Grafana 和 Loki 组成了完整的可观测性栈。本文将深…...