Linux环境下使用interrupt方式操作UART
目录
概述
1 Linux环境下UART设备
2 轮询方式操作UART功能实现
2.1 打开串口函数:usr_serial_open
2.2 关闭串口函数: usr_serial_close
2.3 发送数据函数: usr_serial_sendbytes
2.4 接收数据函数: usr_serial_readinterrupt
3 完整代码
3.1 usr_serial.c 文件内容
3.1 usr_serial.h 文件内容
4 编写测试代码
4.1 编写测试代码
4.2 编写测试代码的Makefile
5 测试中断模式下串口数据的发送和接收功能
源代码下载地址:Linux环境下使用interrupt方式操作UART资源-CSDN文库
概述
本文介绍Linux环境下使用interrupt方式操作UART的方法,实现了串口打开,关闭,发送数据,接收数据功能,还编写测试代码,验证该功能。
1 Linux环境下UART设备
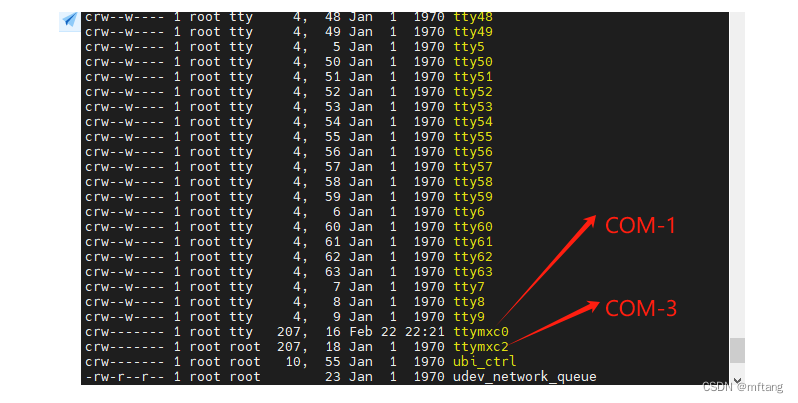
在linux环境下,UART作为一个终端设备存在,可使用命令, 系统会罗列出该目录下所有的device,其中以tty开头的设备为终端设备。串口也是这些设备之一。
ls /dev/ -l
执行该命令后,可以看见许多以tty开头的设备:
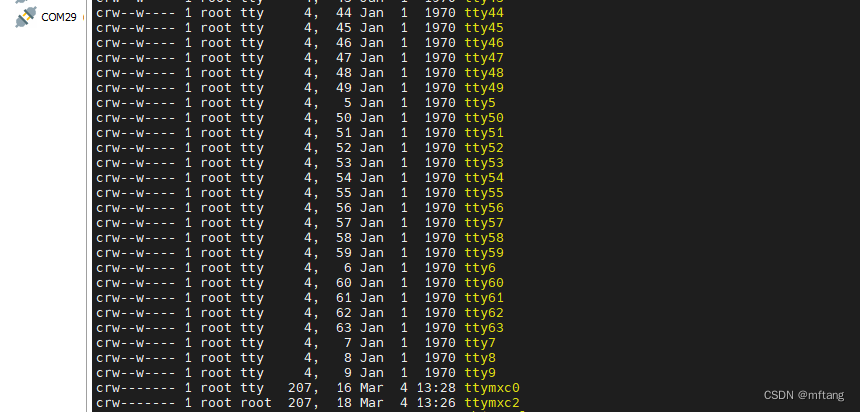
user根据板卡的信息,找到对应的端口,然后才能使用这些串口,笔者使用是基于iMX6ull芯片的板卡,板卡上COM1被用于调试终端,COM3可作为用户终端。
2 轮询方式操作UART功能实现
2.1 打开串口函数:usr_serial_open
函数参数
| 参数 | 描述 |
|---|---|
| port | 终端设备: /dev/tty0 |
| baudrate | 波特率: 1200/2400/4800 ... /115200 |
| databit | 数据bit位: /5/6/7/8 |
| stopbit | 停止位:"1" / "1.5" / "2" |
| parity | 奇偶位使能: 'N' / 'E' / 'O' |
函数实现方法:
代码 43行: 打开端口
代码 49行: 保存termios数据结构中,旧的参数
代码 51行:设置当前用户参数
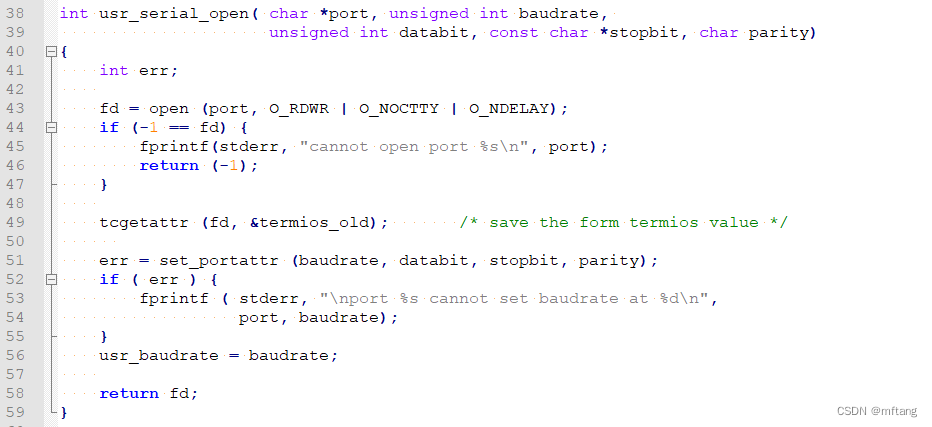
源代码:
int usr_serial_open( char *port, unsigned int baudrate, unsigned int databit, const char *stopbit, char parity)
{int err;fd = open (port, O_RDWR | O_NOCTTY | O_NDELAY);if (-1 == fd) {fprintf(stderr, "cannot open port %s\n", port);return (-1);}tcgetattr (fd, &termios_old); /* save the form termios value */err = set_portattr (baudrate, databit, stopbit, parity);if ( err ) {fprintf ( stderr, "\nport %s cannot set baudrate at %d\n",port, baudrate);}usr_baudrate = baudrate;return fd;
}2.2 关闭串口函数: usr_serial_close
函数实现方法:
代码 64行: 恢复termios default参数
代码 65行:关闭fd端口

void usr_serial_close( void )
{/* flush output data before close and restore old attribute */tcsetattr(fd, TCSADRAIN, &termios_old);close(fd);
}2.3 发送数据函数: usr_serial_sendbytes
函数参数
| 参数 | 描述 |
|---|---|
| *data | 存贮数据的数组 |
| datalength | 发送的数据长度 |
函数实现方法:
代码 72行: 使用write函数发送数据

2.4 接收数据函数: usr_serial_readinterrupt
函数参数
| 参数 | 描述 |
|---|---|
| *data | 存贮数据的数组 |
| datalength | 接收的数据长度 |
函数实现方法:
代码 100~102行: 配置接收中断
代码 104行: 使用read函数写数据
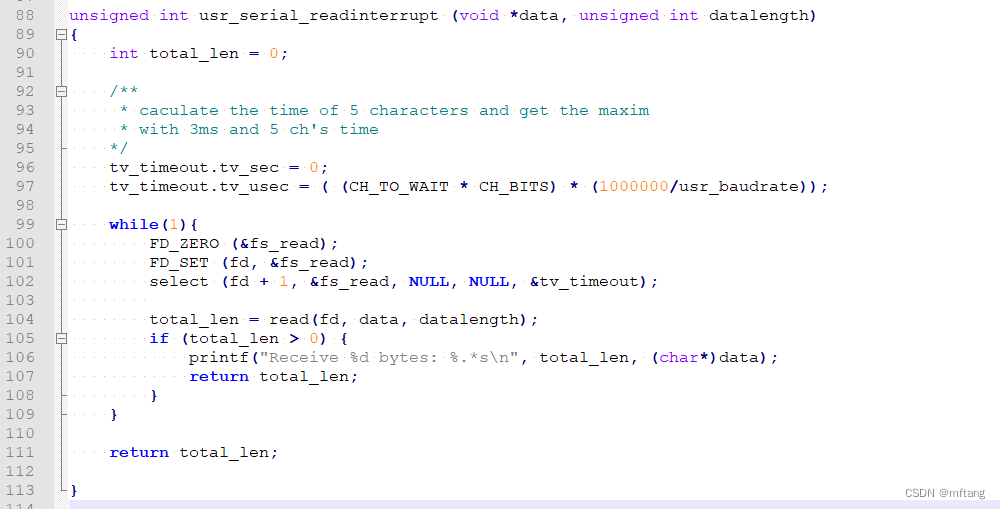
unsigned int usr_serial_readinterrupt (void *data, unsigned int datalength)
{int total_len = 0;/*** caculate the time of 5 characters and get the maxim* with 3ms and 5 ch's time*/tv_timeout.tv_sec = 0;tv_timeout.tv_usec = ( (CH_TO_WAIT * CH_BITS) * (1000000/usr_baudrate));while(1){FD_ZERO (&fs_read);FD_SET (fd, &fs_read);select (fd + 1, &fs_read, NULL, NULL, &tv_timeout);total_len = read(fd, data, datalength);if (total_len > 0) {printf("Receive %d bytes: %.*s\n", total_len, (char*)data);return total_len;}}return total_len;}3 完整代码
代码文件命名为usr_serial, 包含两个文件
usr_serial.c usr_serial.h
3.1 usr_serial.c 文件内容
/***************************************************************
Copyright 2024-2029. All rights reserved.
文件名 : 01_usr_serial.c
作者 : tangmingfei2013@126.com
版本 : V1.0
描述 : linux 串口应用程序接口
其他 : 无
日志 : 初版V1.0 2024/03/01***************************************************************/
#include "usr_serial.h"/* Private define ------------------------------------------------------------*/
#define TIMEOUT_SEC(buflen,baud) (buflen*20/baud+2)
#define TIMEOUT_USEC 0#define CH_TO_WAIT 5
#define CH_BITS 11/* Private variables ---------------------------------------------------------*/
static unsigned int fd; static struct timeval tv_timeout;
static struct termios termios_old;
static struct termios termios_new;static fd_set fs_read;
static unsigned int usr_baudrate;/* Private function prototypes -----------------------------------------------*/
static speed_t baudrate_to_Bxx (unsigned int baudrate);
static void set_data_bit (unsigned int databit);
static unsigned int set_portattr ( unsigned int baudrate,unsigned int databit, const char *stopbit,char parity);int usr_serial_open( char *port, unsigned int baudrate, unsigned int databit, const char *stopbit, char parity)
{int err;fd = open (port, O_RDWR | O_NOCTTY | O_NDELAY);if (-1 == fd) {fprintf(stderr, "cannot open port %s\n", port);return (-1);}tcgetattr (fd, &termios_old); /* save the form termios value */err = set_portattr (baudrate, databit, stopbit, parity);if ( err ) {fprintf ( stderr, "\nport %s cannot set baudrate at %d\n",port, baudrate);}usr_baudrate = baudrate;return fd;
}void usr_serial_close( void )
{/* flush output data before close and restore old attribute */tcsetattr(fd, TCSADRAIN, &termios_old);close(fd);
}unsigned int usr_serial_sendbytes (void * data, unsigned int datalength)
{unsigned int total_len = 0;total_len = write(fd, data, datalength);return (total_len);
}int usr_serial_readbytes (void *data, unsigned int datalength)
{unsigned int total_len = 0;total_len = read(fd, data, datalength);if (total_len > 0) {printf("Receive %d bytes: %.*s\n", total_len, (char*)data);}return (total_len);
}unsigned int usr_serial_readinterrupt (void *data, unsigned int datalength)
{int total_len = 0;/*** caculate the time of 5 characters and get the maxim* with 3ms and 5 ch's time*/tv_timeout.tv_sec = 0;tv_timeout.tv_usec = ( (CH_TO_WAIT * CH_BITS) * (1000000/usr_baudrate));while(1){FD_ZERO (&fs_read);FD_SET (fd, &fs_read);select (fd + 1, &fs_read, NULL, NULL, &tv_timeout);total_len = read(fd, data, datalength);if (total_len > 0) {printf("Receive %d bytes: %.*s\n", total_len, (char*)data);return total_len;}}return total_len;}static void set_data_bit (unsigned int databit)
{termios_new.c_cflag &= ~CSIZE;switch (databit) {default:case 8:termios_new.c_cflag |= CS8;break;case 7:termios_new.c_cflag |= CS7;break;case 6:termios_new.c_cflag |= CS6;break;case 5:termios_new.c_cflag |= CS5;break;}
}static void set_stopbit (const char *stopbit)
{if (0 == strcmp (stopbit, "1")) {termios_new.c_cflag &= ~CSTOPB; /* 1 stop bit */}else if (0 == strcmp (stopbit, "1.5")) {termios_new.c_cflag &= ~CSTOPB; /* 1.5 stop bits */}else if (0 == strcmp (stopbit, "2")) {termios_new.c_cflag |= CSTOPB; /* 2 stop bits */}else {termios_new.c_cflag &= ~CSTOPB; /* 1 stop bit */}
}static void set_parity (char parity)
{switch (parity) {case 'N': /* no parity check */termios_new.c_cflag &= ~PARENB;break;case 'E': /* even */termios_new.c_cflag |= PARENB;termios_new.c_cflag &= ~PARODD;break;case 'O': /* odd */termios_new.c_cflag |= PARENB;termios_new.c_cflag |= ~PARODD;break;default: /* no parity check */termios_new.c_cflag &= ~PARENB;break;}
}static speed_t baudrate_to_Bxx (unsigned int baudrate)
{switch (baudrate) {case 0:return (B0);case 50:return (B50);case 75:return (B75);case 110:return (B110);case 134:return (B134);case 150:return (B150);case 200:return (B200);case 300:return (B300);case 600:return (B600);case 1200:return (B1200);case 2400:return (B2400);case 9600:return (B9600);case 19200:return (B19200);case 38400:return (B38400);case 57600:return (B57600);case 115200:return (B115200);default:return (B9600);}
}static void set_baudrate (unsigned int baudrate)
{speed_t speed;speed = baudrate_to_Bxx (baudrate); /* set baudrate */cfsetispeed(&termios_new, speed); // set input speedcfsetospeed(&termios_new, speed); // set output speed
}static unsigned int set_portattr ( unsigned int baudrate, // 1200 2400 4800 9600 .. 115200unsigned int databit, // 5, 6, 7, 8const char *stopbit, // "1", "1.5", "2"char parity) // N(o), O(dd), E(ven)
{bzero(&termios_new, sizeof (termios_new));cfmakeraw (&termios_new);set_baudrate (baudrate);termios_new.c_cflag |= CLOCAL | CREAD; /* | CRTSCTS */set_data_bit (databit);set_parity (parity);set_stopbit (stopbit);termios_new.c_cc[VTIME] = 1; /* unit: 1/10 second. */termios_new.c_cc[VMIN] = 255; /* minimal characters for reading */return (tcsetattr (fd, TCSANOW, &termios_new));
}/* End of this file */
3.1 usr_serial.h 文件内容
#ifndef __USR_SERIAL_H
#define __USR_SERIAL_H#include <termios.h> /* tcgetattr, tcsetattr */
#include <stdio.h> /* perror, printf, puts, fprintf, fputs */
#include <unistd.h> /* read, write, close */
#include <fcntl.h> /* open */
#include <sys/signal.h>
#include <sys/types.h>
#include <string.h> /* bzero, memcpy */
#include <limits.h> /* CHAR_MAX */#ifdef __cplusplus
extern "C" {
#endifint usr_serial_open( char *port, unsigned int baudrate, unsigned int databit, const char *stopbit, char parity);
void usr_serial_close( void );unsigned int usr_serial_sendbytes (void * data, unsigned int datalength);
int usr_serial_readbytes (void *data, unsigned int datalength);
unsigned int usr_serial_readinterrupt (void *data, unsigned int datalength);#ifdef __cplusplus
}
#endif#endif /* __USR_SERIAL_H */
4 编写测试代码
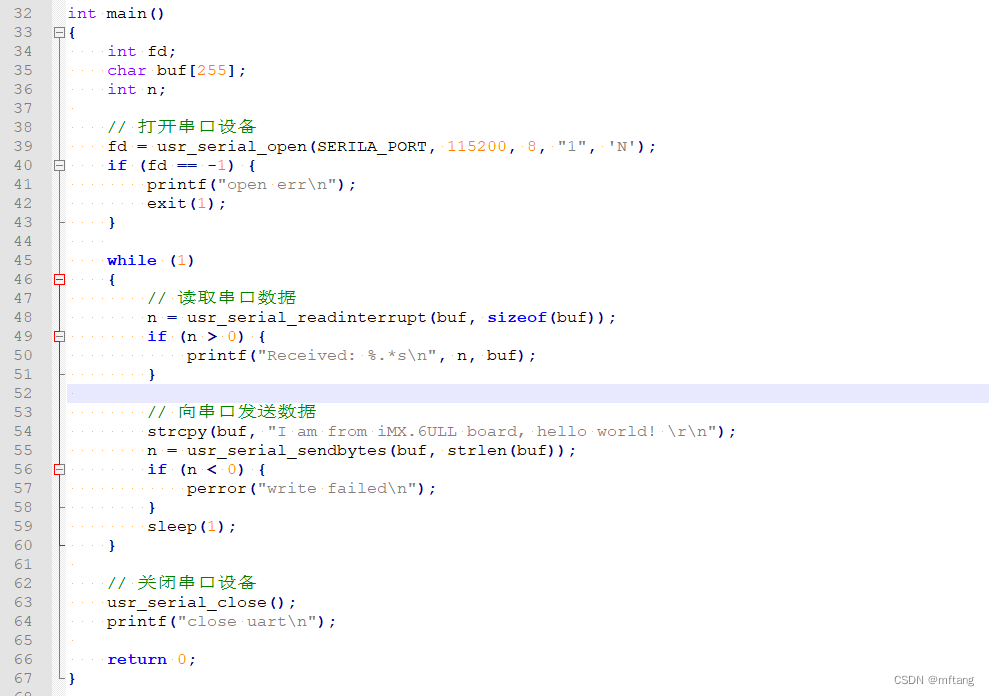
4.1 编写测试代码
代码实现功能介绍:
代码 39行:初始化串口设备,设置baud,数据位,停止位等参数
代码 48行:从串口读取数据
代码 55行:向串口写数据
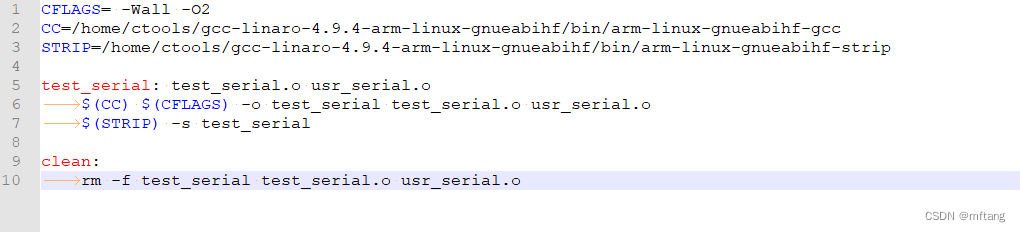
4.2 编写测试代码的Makefile
代码实现功能介绍:
代码 2行:编译器地址
代码 3行:linux内核地址
代码 3行:链接的.o文件名
代码 6行:生成可执行型文件
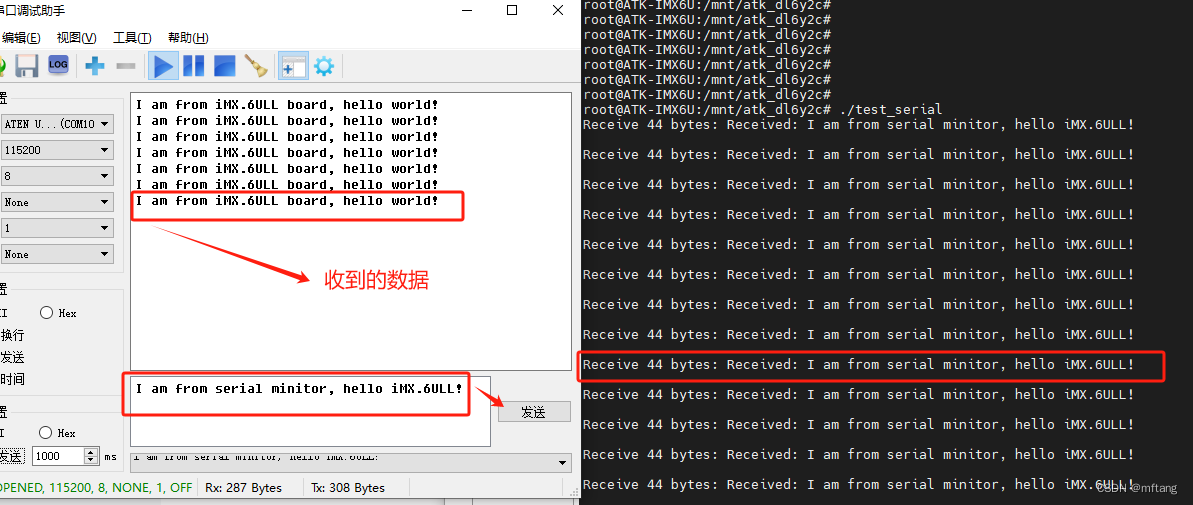
5 测试中断模式下串口数据的发送和接收功能
使用Make命令编译代码,然后将生成的可执行性文件copy到NFS的共享目录下,然后在板卡中执行。
在代码中,定义要发送的数据如下:
strcpy(buf, "I am from iMX.6ULL board, hello world! \r\n");

PC端,使用串口调试助手接收数据,详细信息如下:
相关文章:
Linux环境下使用interrupt方式操作UART
目录 概述 1 Linux环境下UART设备 2 轮询方式操作UART功能实现 2.1 打开串口函数:usr_serial_open 2.2 关闭串口函数: usr_serial_close 2.3 发送数据函数: usr_serial_sendbytes 2.4 接收数据函数: usr_serial_readinterr…...
修改Android打包apk的名字和目录
app打包生成apk后通常需要进行备份,但是要区分好哪个apk是什么版本的、什么时候打包的,以方便以后区分使用。 最开始的想法是把版本号、创建时间这些加在apk文件名上即可,但是公司要求apk使用一个固定的名称,那我怎么保存版本号信…...
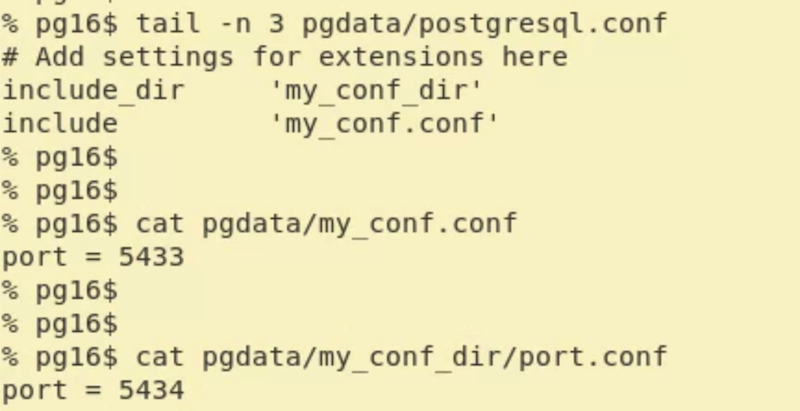
管理 PostgreSQL 中配置参数的各种方法
管理 PostgreSQL 中配置参数的各种方法 1. 概述 PostgreSQL提供了一个配置文件 postgresql.conf 让用户自定义参数。您可能需要更改一些参数来调整性能或在工作环境中部署 PostgreSQL 服务器。在这篇博文中,我们将探索管理这些参数的不同方法。 2. 以不同方式管理…...
)
Linux命令-continue命令(结束本次循环,继续执行下一个for,while或until循环。)
概要 continue [n]主要用途 结束本次循环,继续执行下一个for,while或until循环;可指定从第几层循环继续执行。 参数 n(可选):大于等于1的整数,用于指定从第几层循环继续执行。 返回值 返回…...
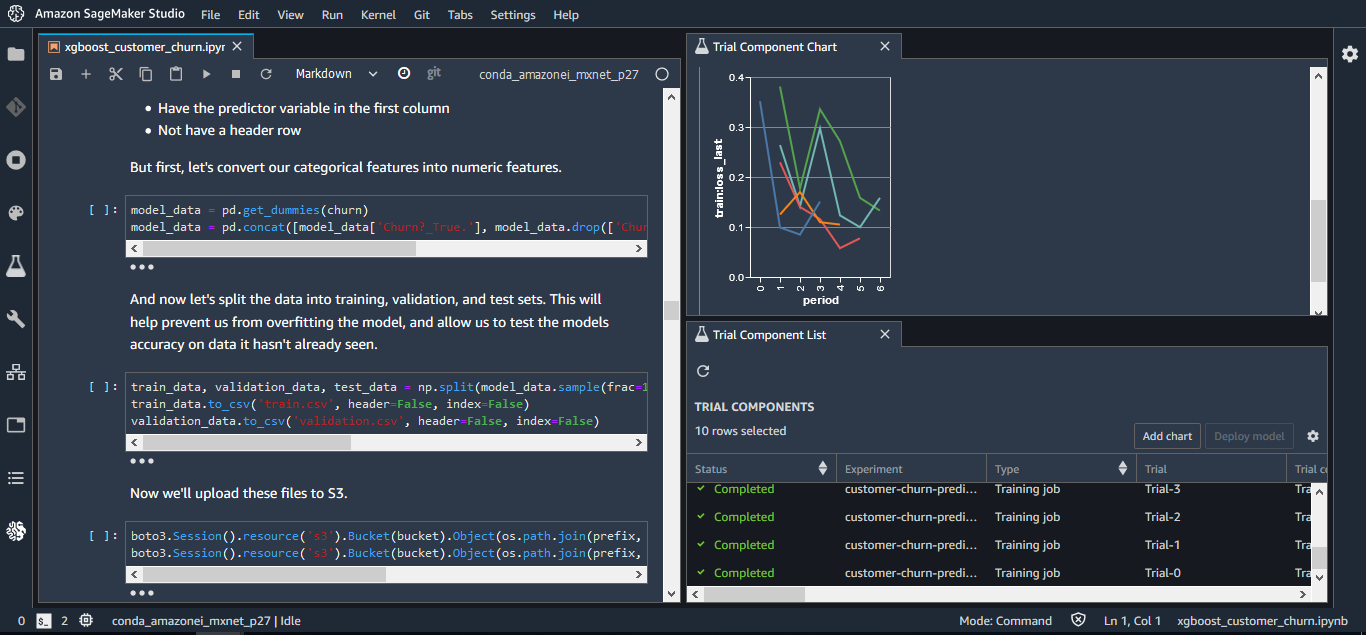
智能部署之巅:Amazon SageMaker 引领机器学习革新
本篇文章授权活动官方亚马逊云科技文章转发、改写权,包括不限于在 亚马逊云科技开发者社区, 知乎,自媒体平台,第三方开发者媒体等亚马逊云科技官方渠道。 (全球 TMT 2023年12月6日讯)亚马逊云科技在 2023 re:Invent 全…...

国内哪个工具可以平替chatgpt?国内有哪些比较好用的大模型gpt?
我自己试用了很多的平台,发现三个比较好的大模型平台,对普通用户也比较的友好的,而且返回内容相对来说,正确率更高的,并且相关场景插件比较丰富的国内厂商。 本文说的,是我自己觉得的,比较有主观…...

python如何打包py文件为exe
要将Python程序打包为可执行文件(.exe),您可以使用一些第三方工具。以下是两个常用的工具:PyInstaller和cx_Freeze。 使用PyInstaller PyInstaller是一个流行的Python打包工具,可以将Python程序及其所有依赖项打包为…...

yolov9网络结构图
文章目录 配置文件主干分支backbone预测头headyolov9网络结构图 系列文章目录 论文链接:👿 YOLOv9: Learning What You Want to Learn Using Programmable Gradient Information代码链接:👿 https://github.com/WongKinYiu/yolov9…...
Spark 核心API
核心 API spark core API 指的是 spark 预定义好的算子。无论是 spark streaming 或者 Spark SQL 都是基于这些最基础的 API 构建起来的。理解这些核心 API 也是写出高效 Spark 代码的基础。 Transformation 转化类的算子是最多的,学会使用这些算子就应付多数的数…...

OpenLayers线性渐变和中心渐变(径向渐变)
目录 1.前言2.添加一个面要素3.线性渐变3.1 第一个注意点3.2 第二个注意点 4.中心渐变(径向渐变)5.总结 1.前言 OpenLayers官网有整个图层的渐变示例,但是没有单个要素的渐变示例,我们这里来补充一下。OpenLayers中的渐变是通过fi…...
)
[210. 课程表 II] 拓扑排序模板(DFS+BFS)
Problem: 210. 课程表 II 文章目录 思路解题方法Code 思路 本题是经典拓扑排序模板,通过DFS和BFS两种方式进行实现。 解题方法 DFS DFS方法的重点在于如何标记节点状态,初做题者如果只用未访问和已访问两种状态很容易陷入死结。正确的做法是使用三种状…...

我的第一个python web 网站
# -*- coding: utf-8 -*-import http.server import socketserver from datetime import datetimePORT 8000import sys# ...class MyHandler(http.server.SimpleHTTPRequestHandler):def do_GET(self):if self.path /:# 如果路径是根路径,返回页面内容self.send_r…...
产品展示型wordpress外贸网站模板
孕婴产品wordpress外贸网站模板 吸奶器、待产包、孕妇枕头、护理垫、纸尿裤、孕妇装、孕婴产品wordpress外贸网站模板。 https://www.jianzhanpress.com/?p4112 床品毛巾wordpress独立站模板 床单、被套、毛巾、抱枕、靠垫、围巾、布艺、枕头、乳胶枕、四件套、浴巾wordpre…...

四信全球化拓展再启新篇!LoRa传感器与云平台领航智能感知时代
随着科技浪潮的不断推进,物联网已逐渐融入我们的生活。刚刚结束的MWC24盛会上,四信带来了一系列前沿技术成果,不仅将5G技术成功扩展至当前市场主流类型的终端,更携手联通、ASR等业界巨头,在连接、5G RedCap、AI、LoRa以…...

阿里云k8s环境下,因slb限额导致的发布事故
一、背景 阿里云k8s容器,在发布java应用程序的时候,客户端访问出现500错误。 后端服务是健康且可用的,网关层大量500错误请求,slb没有流入和流出流量。 经过回滚,仍未能解决错误。可谓是一次血的教训,特…...

【STM32+OPENMV】矩形识别
一、准备工作 有关OPENMV最大色块追踪及与STM32通信内容,详情见【STM32HAL】与OpenMV通信 二、所用工具 1、芯片:STM32F103C8T6 2、CUBEMX配置软件 3、KEIL5 4、OPENMV 三、实现功能 寻找黑色矩形,并将最大矩形的四个边缘坐标发送给STM…...

在吗?腾讯云服务器优惠价格表曝光_2023年3月报价请过目!
腾讯云服务器多少钱一年?61元一年起,2核2G3M配置,腾讯云2核4G5M轻量应用服务器165元一年、756元3年,4核16G12M服务器32元1个月、312元一年,8核32G22M服务器115元1个月、345元3个月,腾讯云服务器网txyfwq.co…...
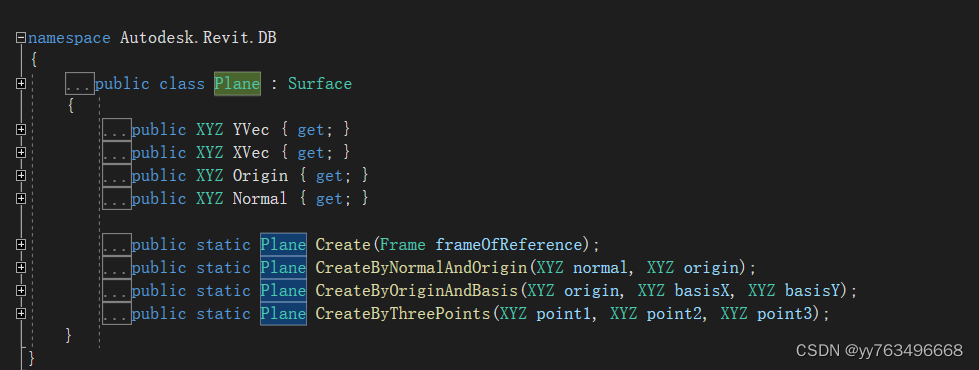
Revit-二开之创建Plane-(7)
2016版本的Plane 2017版本的Plane 2018版本及以上版本的Plane 由此可见2017版本是一个分水岭 #if REVIT2016Plane plane = new Plane(uiDoc.Document.ActiveView...

【操作系统学习笔记】文件管理1.2
【操作系统学习笔记】文件管理1.2 参考书籍: 王道考研 视频地址: Bilibili 文件的逻辑结构 无结构文件 文件内部的数据就是一系列的二进制流或字符流组成,又称流式文件,例如 .text 文件 有结构文件 由一组相似的记录组成,又称记录式文件…...

算法归纳【数组篇】
目录 二分查找1. 前提条件:2. 二分查找边界 2.移除元素有序数组的平方长度最小的子数组59.螺旋矩阵II54. 螺旋矩阵 二分查找 参考链接 https://programmercarl.com/0704.%E4%BA%8C%E5%88%86%E6%9F%A5%E6%89%BE.html#%E6%80%9D%E8%B7%AF 1. 前提条件: 数…...

GameFramework——FileSystem篇
目录 一、快速入门 1.1 什么是文件系统模块? 1.2 基本使用步骤 1.2.1 创建文件系统 1.2.2 写入文件 1.2.3 读取文件 1.2.4 删除文件 1.2.5 加载已有文件系统 二、文件布局 2.1 HeaderData(文件头) 2.2 BlockData(块数据…...

MySQL从节点上的服务崩了后如何做主从读写分离?
背景 我们的项目采用了读写分离的方案:查询和更新的业务走主库,统计相关的功能走从库,从而减少主库的压力。原理如下图所示: 读写分离的方案 如果从库崩了,实在无法访问了,就会把所有请求打到主库上。原理…...

告别“炼丹”:用ReVeal的GGNN+Triplet Loss实战代码漏洞检测,我踩过的坑你别踩
从理论到实践:ReVeal漏洞检测模型落地中的关键挑战与解决方案 在代码安全领域,深度学习技术的应用正经历着从实验室研究到工业落地的关键转折期。ReVeal作为近年来备受关注的漏洞检测框架,其结合GGNN图神经网络与Triplet Loss的创新设计&…...
字节流 字符流)
JAVA重点基础、进阶知识及易错点总结(14)字节流 字符流
🚀 Java 巩固进阶 第14天 主题:字节流 & 字符流 —— 文件读写的核心引擎📅 进度概览:今天进入 IO 流的灵魂章节!掌握这 4 个核心类,你就能打通文件读写的任督二脉。 💡 核心价值ÿ…...

Qt多线程数据库操作:安全分离连接,彻底解决段错误
在 Qt 开发中,数据库操作与多线程的搭配是一个经典难题。许多开发者都曾遇到过这样的诡异现象:程序运行一段时间后突然崩溃,堆栈指向数据库操作,但代码逻辑明明正确。真相只有一个——数据库连接被多个线程共享了。本文结合真实项…...
)
2026降AIGC率工具实测:10款好用工具推荐(论文AI痕迹重必看)
临近毕业季,不少同学都在为论文的AIGC检测头疼:明明是自己写的内容,却被判定为AI生成?用AI搭了初稿,怎么改都消不掉机器痕迹?到底有没有靠谱的降AI率工具能真正解决问题? 今天我就给大家整理了1…...

Kubernetes中的ConfigMap与Secret:安全高效管理配置的终极指南
引言:云原生时代的配置困境 在传统的运维模式中,配置往往硬编码在镜像中,或通过环境变量散落在各处。随着微服务架构的普及,这种模式带来了“配置漂移”、镜像臃肿、敏感信息泄露等痛点。 Kubernetes 通过 ConfigMap 和 Secret …...

电源管理入门-12 clock驱动
电源管理的两个大方面就是电压和时钟。 Clock 时钟就是 SoC 中的脉搏,由它来控制各个部件按各自的节奏跳动。比如,CPU主频设置,串口的波特率设置,I2S的采样率设置,I2C的速率设置等等。这些不同的clock设置,…...

html-to-docx:让HTML转Word不再头疼的开源解决方案
html-to-docx:让HTML转Word不再头疼的开源解决方案 【免费下载链接】html-to-docx HTML to DOCX converter 项目地址: https://gitcode.com/gh_mirrors/ht/html-to-docx 在数字化办公的浪潮中,文档格式转换已成为企业和个人的日常需求。据行业调研…...

光流法在气象雷达中的应用:从原理到外推实践
光流法在气象雷达中的应用:从原理到外推实践 气象雷达作为现代气象监测的核心工具,其回波数据蕴含着丰富的天气系统动态信息。如何从这些看似静态的图像序列中提取运动规律,进而预测未来短时内的天气变化,一直是气象学界和工程界关…...