【PCL】(二十七)基于法线差的点云分割
(二十七)基于法线差的点云分割
图片来源
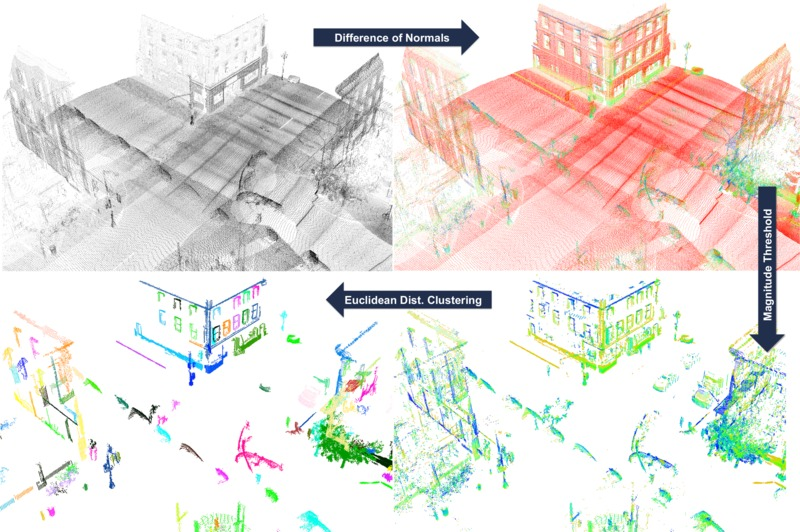
提出这个方法的论文:Difference of Normals as a Multi-Scale Operator in Unorganized Point Clouds
算法流程:
-
在大尺度的范围内(半径 r 1 r_1 r1)估计每个点的法线;
-
在晓尺度的范围(半径 r 2 r_2 r2)估计每个点的法线;
-
计算法线差(Difference of Normals (DoN));

-
根据设定的法线差阈值过滤点;
-
对剩余的点进行欧几里得分割。
don_segmentation.cpp
/*** @file don_segmentation.cpp* Difference of Normals Example for PCL Segmentation Tutorials.** @author Yani Ioannou* @date 2012-09-24*/
#include <string>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/search/organized.h>
#include <pcl/search/kdtree.h>
#include <pcl/features/normal_3d_omp.h>
#include <pcl/filters/conditional_removal.h>
#include <pcl/segmentation/extract_clusters.h>
#include <pcl/features/don.h>using namespace pcl;int main (int argc, char *argv[])
{///The smallest scale to use in the DoN filter.double scale1;///The largest scale to use in the DoN filter.double scale2;///The minimum DoN magnitude to threshold bydouble threshold;///segment scene into clusters with given distance tolerance using euclidean clusteringdouble segradius;if (argc < 6){std::cerr << "usage: " << argv[0] << " inputfile smallscale largescale threshold segradius" << std::endl;exit (EXIT_FAILURE);}/// the file to read from.std::string infile = argv[1];/// small scalestd::istringstream (argv[2]) >> scale1;/// large scalestd::istringstream (argv[3]) >> scale2;std::istringstream (argv[4]) >> threshold; // threshold for DoN magnitudestd::istringstream (argv[5]) >> segradius; // threshold for radius segmentation// Load cloud in blob formatpcl::PCLPointCloud2 blob;pcl::io::loadPCDFile (infile.c_str (), blob);pcl::PointCloud<PointXYZRGB>::Ptr cloud (new pcl::PointCloud<PointXYZRGB>);pcl::fromPCLPointCloud2 (blob, *cloud);// OrganizedNeighbor适用于有组织的数据。KDTree适用于无组织的数据pcl::search::Search<PointXYZRGB>::Ptr tree;if (cloud->isOrganized ()){tree.reset (new pcl::search::OrganizedNeighbor<PointXYZRGB> ());}else{tree.reset (new pcl::search::KdTree<PointXYZRGB> (false));}// Set the input pointcloud for the search treetree->setInputCloud (cloud);if (scale1 >= scale2){std::cerr << "Error: Large scale must be > small scale!" << std::endl;exit (EXIT_FAILURE);}// 计算每个点小尺度和大尺度的法线// 通过OpenMP多线程,使用处理器中的多个内核来计算法线pcl::NormalEstimationOMP<PointXYZRGB, PointNormal> ne; // PointNormal-float x,y,z,normal[3], curvaturene.setInputCloud (cloud);ne.setSearchMethod (tree);// 设置一个在所有法线计算中使用的视点,确保了在不同尺度上估计的法线的基本方向一致。ne.setViewPoint (std::numeric_limits<float>::max (), std::numeric_limits<float>::max (), std::numeric_limits<float>::max ());// calculate normals with the small scalestd::cout << "Calculating normals for scale..." << scale1 << std::endl;pcl::PointCloud<PointNormal>::Ptr normals_small_scale (new pcl::PointCloud<PointNormal>);ne.setRadiusSearch (scale1);ne.compute (*normals_small_scale);// calculate normals with the large scalestd::cout << "Calculating normals for scale..." << scale2 << std::endl;pcl::PointCloud<PointNormal>::Ptr normals_large_scale (new pcl::PointCloud<PointNormal>);ne.setRadiusSearch (scale2);ne.compute (*normals_large_scale);// Create output cloud for DoN resultsPointCloud<PointNormal>::Ptr doncloud (new pcl::PointCloud<PointNormal>);copyPointCloud (*cloud, *doncloud);std::cout << "Calculating DoN... " << std::endl;// DoN 估计模板的3个参数<第一个对应于输入点云类型,第二个对应于为点云估计的法线类型.第三个对应于输出类型pcl::DifferenceOfNormalsEstimation<PointXYZRGB, PointNormal, PointNormal> don;don.setInputCloud (cloud);don.setNormalScaleLarge (normals_large_scale);don.setNormalScaleSmall (normals_small_scale);if (!don.initCompute ()){std::cerr << "Error: Could not initialize DoN feature operator" << std::endl;exit (EXIT_FAILURE);}// Compute DoNdon.computeFeature (*doncloud);// Save DoN featurespcl::PCDWriter writer;writer.write<pcl::PointNormal> ("don.pcd", *doncloud, false); std::cout << "Filtering out DoN mag <= " << threshold << "..." << std::endl;// 设定滤波条件,根据点的法线差矢量过滤点 pcl::ConditionOr<PointNormal>::Ptr range_cond (new pcl::ConditionOr<PointNormal> ());// "curvature" :过滤DoN的l2范数小于threshold的点range_cond->addComparison (pcl::FieldComparison<PointNormal>::ConstPtr (new pcl::FieldComparison<PointNormal> ("curvature", pcl::ComparisonOps::GT, threshold)));// 创建条件滤波器pcl::ConditionalRemoval<PointNormal> condrem;condrem.setCondition (range_cond);condrem.setInputCloud (doncloud);pcl::PointCloud<PointNormal>::Ptr doncloud_filtered (new pcl::PointCloud<PointNormal>);// Apply filtercondrem.filter (*doncloud_filtered);doncloud = doncloud_filtered;// Save filtered outputstd::cout << "Filtered Pointcloud: " << doncloud->size () << " data points." << std::endl;writer.write<pcl::PointNormal> ("don_filtered.pcd", *doncloud, false); // 欧几里得聚类分割std::cout << "Clustering using EuclideanClusterExtraction with tolerance <= " << segradius << "..." << std::endl;pcl::search::KdTree<PointNormal>::Ptr segtree (new pcl::search::KdTree<PointNormal>);segtree->setInputCloud (doncloud);std::vector<pcl::PointIndices> cluster_indices;pcl::EuclideanClusterExtraction<PointNormal> ec;ec.setClusterTolerance (segradius);ec.setMinClusterSize (50);ec.setMaxClusterSize (100000);ec.setSearchMethod (segtree);ec.setInputCloud (doncloud);ec.extract (cluster_indices);int j = 0;for (const auto& cluster : cluster_indices){pcl::PointCloud<PointNormal>::Ptr cloud_cluster_don (new pcl::PointCloud<PointNormal>);for (const auto& idx : cluster.indices){cloud_cluster_don->points.push_back ((*doncloud)[idx]);}cloud_cluster_don->width = cloud_cluster_don->size ();cloud_cluster_don->height = 1;cloud_cluster_don->is_dense = true;//Save clusterstd::cout << "PointCloud representing the Cluster: " << cloud_cluster_don->size () << " data points." << std::endl;std::stringstream ss;ss << "don_cluster_" << j << ".pcd";writer.write<pcl::PointNormal> (ss.str (), *cloud_cluster_don, false);++j;}
}
CMakeLists.txt
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)project(don_segmentation)find_package(PCL 1.7 REQUIRED)include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})add_executable (don_segmentation don_segmentation.cpp)
target_link_libraries (don_segmentation ${PCL_LIBRARIES})
数据样例
编译并运行:
$ ./don_segmentation <inputfile> <smallscale> <largescale> <threshold> <segradius>
$./don_segmentation 003000.pcd 0.4 2 0.2 0.5
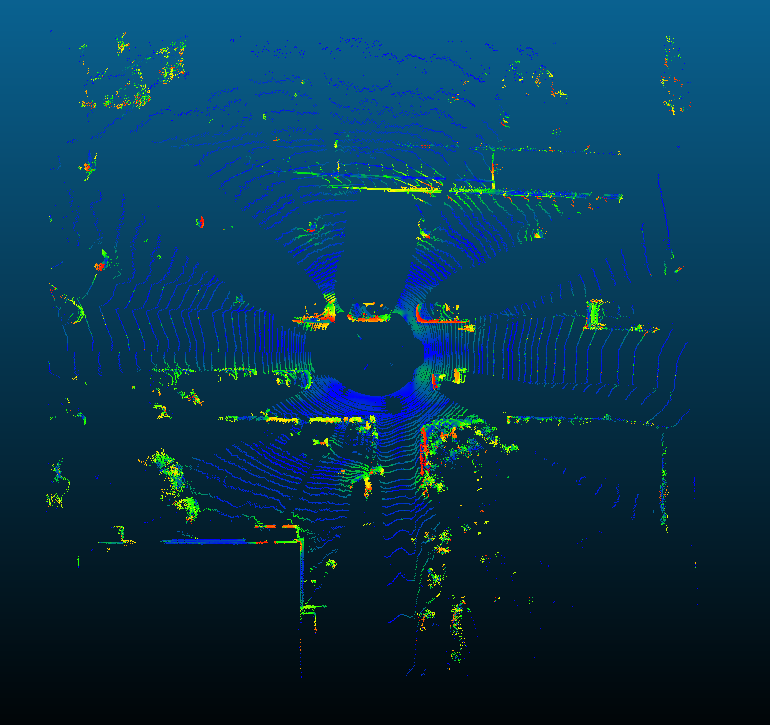
DoN:
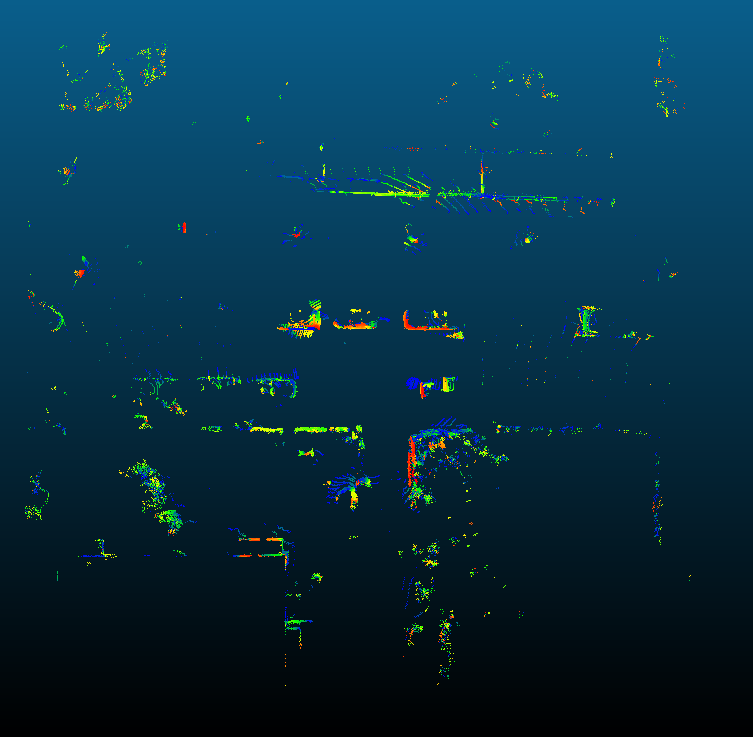
根据DoN滤除点:
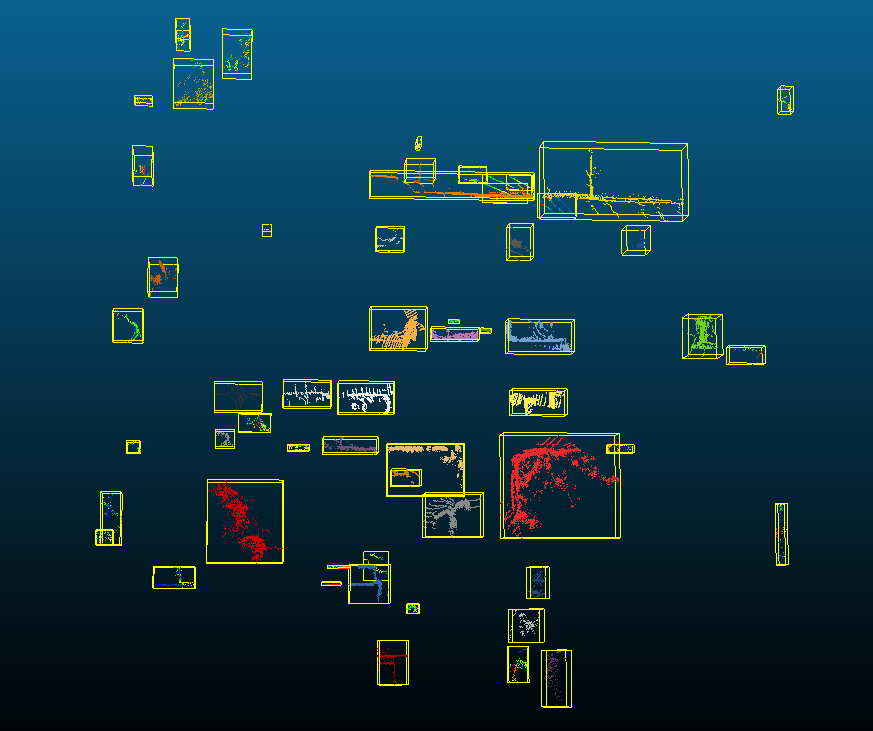
聚类:
相关文章:
【PCL】(二十七)基于法线差的点云分割
(二十七)基于法线差的点云分割 图片来源 提出这个方法的论文:Difference of Normals as a Multi-Scale Operator in Unorganized Point Clouds 算法流程: 在大尺度的范围内(半径 r 1 r_1 r1)估计每个点…...

智慧公厕系统的组成部分有什么?
智慧公厕系统是现代城市管理中一项重要的创新,利用物联网、互联网、大数据、云计算、自动化控制等先进的技术手段,提供高效便捷的公厕服务。从信息系统的角度来看,智慧公厕系统主要由硬件、软件和网络组成,硬件、软件和网络三大部…...

[数据集][目标检测]芒果叶病害数据集VOC+YOLO格式4000张5类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):4000 标注数量(xml文件个数):4000 标注数量(txt文件个数):4000 标注…...
Linux: 预备
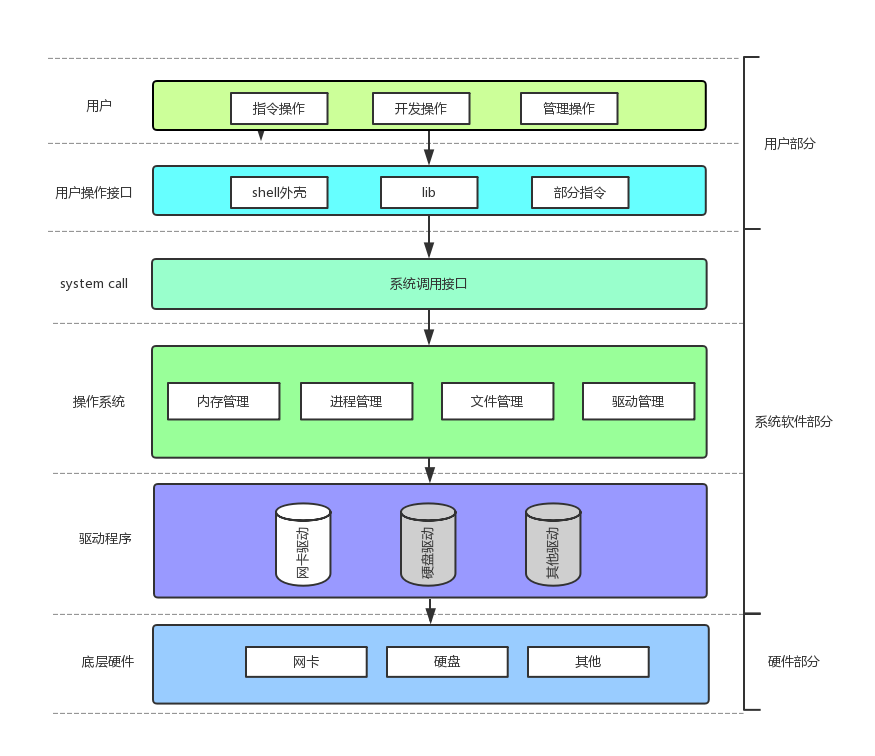
计算机结构基础 操作系统: 内核 (管理软硬件) shell(给用户使用操作系统的方式) 操作系统的目标 对硬件抽象 原因:操作系统是对软硬件资源管理的应用软件抽象:内存管理, 进程管理, 文件管理, 驱动管理软件:驱动程序(给软件提供访问硬件的软件)硬件:磁盘(对应文件), 网卡等隔离…...

ChatGPT 升级出现「我们未能验证您的支付方式/we are unable to authenticate」怎么办?
ChatGPT 升级出现「我们未能验证您的支付方式/we are unable to authenticate」怎么办? 在订阅 ChatGPT Plus 时,有时候会出现以下报错 : We are unable to authenticate your payment method. 我们未能验证您的支付方式。 出现 unable to a…...
JavaWeb - 3 - JavaScript(JS)
JavaScript(JS)官方参考文档:JavaScript 教程 JavaScript(简称:JS)是一门跨平台、面向对象的脚本语言,是用来控制网页行为的,它能使网页可交互(脚本语言就不需要编译,直接通过浏览器…...
基于springboot+vue的美食烹饪互动平台
博主主页:猫头鹰源码 博主简介:Java领域优质创作者、CSDN博客专家、阿里云专家博主、公司架构师、全网粉丝5万、专注Java技术领域和毕业设计项目实战,欢迎高校老师\讲师\同行交流合作 主要内容:毕业设计(Javaweb项目|小程序|Pyt…...

linux中操作服务器常用命令
在Linux中操作服务器时,常用的命令包括: ls:列出目录内容。 cd:切换目录。 pwd:显示当前所在的目录路径。 mkdir:创建一个新的目录。 rmdir:删除一个空的目录。 cp:复制文件或目录。…...

最简k8s部署(AWS Load Balancer Controller使用)
问题 我需要在k8s集群里面部署springboot服务,通过k8s ingress访问集群内部的springboot服务,应该怎么做? 这里假设已经准备好k8s集群,而且也准备好springboot服务的运行镜像了。这里我们将精力放在k8s服务编排上面。 一图胜千言…...

差距拉开了!量化大厂最新业绩排行曝光!
经历了一月份的失落和二月份绝地反攻,量化大厂们的整体业绩备受关注。 而今年2月份的量化战绩,甚为关键! 毕竟市场指数“前低后高”,基金经理与投资人开年以来,共同经历了“惊心动魄”的考验。 量化大厂,…...
【Web前端】Vue核心基础
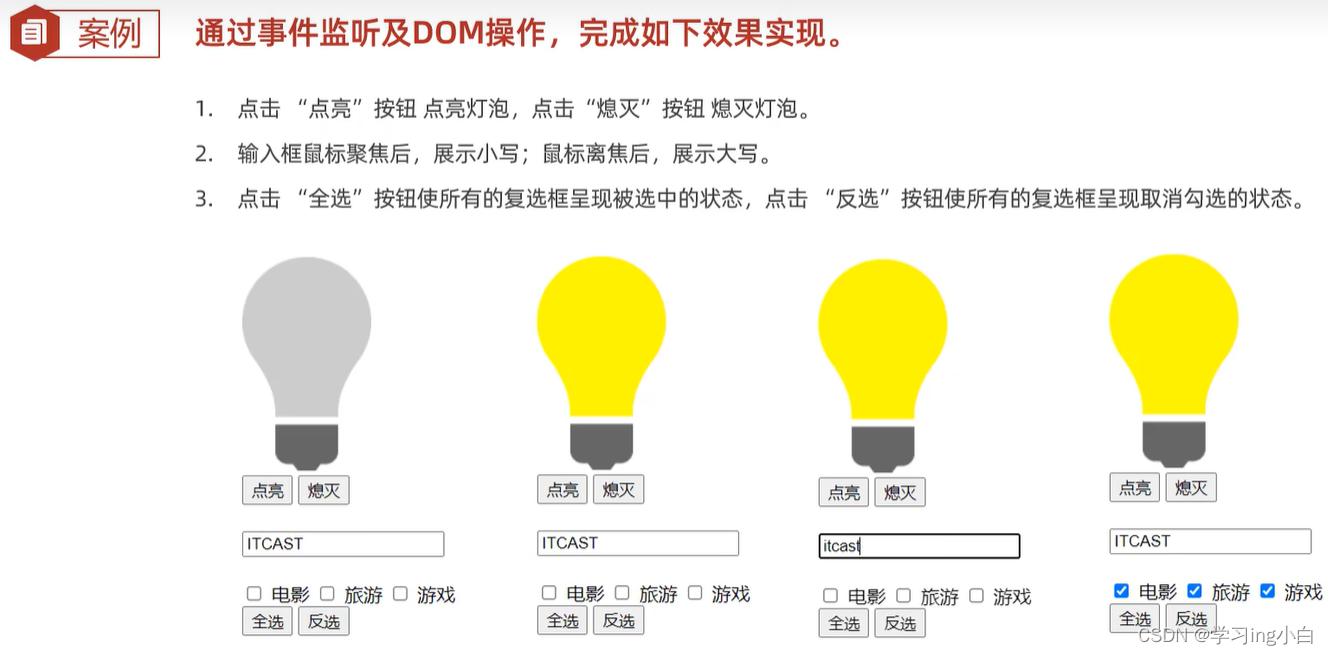
文章目录 1. Vue简介2. Vue官网使用指南3. 初识Vue3.1 搭建Vue开发环境3.2 HelloWorld案例3.3 el与data的两种写法3.4 MVVM模型3.5 模板语法 4. 数据绑定4.1 v-bind单向数据绑定4.2 v-model双向数据绑定 5. 事件处理5.1 v-on绑定事件5.2 事件修饰符5.3 键盘事件 6. 计算属性6.1…...

Linux操作系统项目上传Github代码仓库指南
文章目录 1 创建SSH key2.本地git的用户名和邮箱设置3.测试连接4.创建仓库5.终端项目上传 1 创建SSH key 1.登录github官网,点击个人头像,点击Settings,然后点击SSH and GPG keys,再点击New SSH key。 Title 可以随便取,但是 key 需要通过终端生成。 Linux终端执行…...

机器学习--循环神经网路(RNN)2
在这篇文章中,我们介绍一下其他的RNN。 一.深层RNN 循环神经网络的架构是可以任意设计的,之前提到的 RNN 只有一个隐藏层,但 RNN 也可以是深层的。比如把 xt 丢进去之后,它可以通过一个隐藏层,再通过第二个隐藏层&am…...
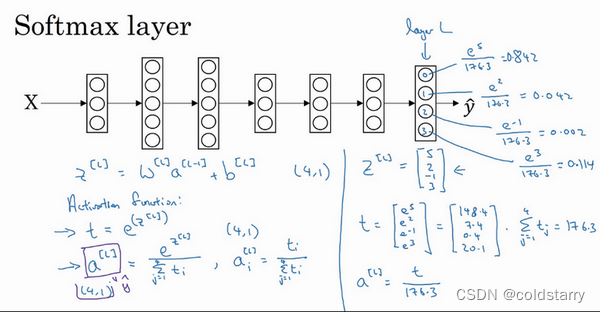
sheng的学习笔记-AI-多分类学习:ECOC,softmax
目录:sheng的学习笔记-AI目录-CSDN博客 基本术语: 若我们欲预测的是离散值,例如“好瓜”“坏瓜”,此类学习任务称为“分类”(classification); 若欲预测的是连续值,例如西瓜成熟度0.95、0.37,…...
ChatGPT Plus 支付出现「您的银行卡被拒绝/your card has been declined」怎么办?
ChatGPT Plus 支付出现「您的银行卡被拒绝/your card has been declined」怎么办? 在订阅 ChatGPT Plus 或者 OpenAI API 时,有时候会出现已下报错 : Your card has been declined. 您的银行卡被拒绝 出现这种错误,有以下几个解…...
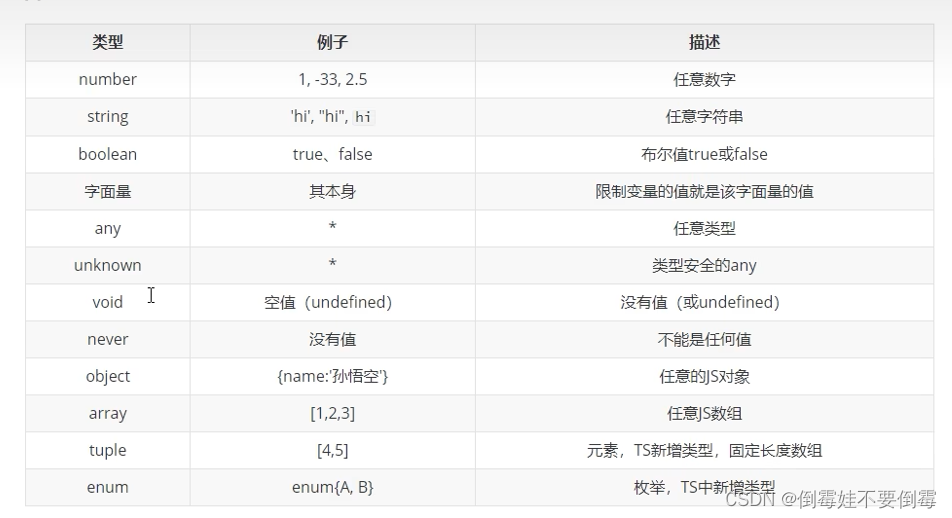
typescript学习(更新中)
目录 开发环境搭建类型如何声明有哪些类型编译配置文件 开发环境搭建 npm i -g typescripttsc检查是否安装成功 类型如何声明 // 先声明再赋值 let a: number a 1// 直接赋值 let b 1function sum(a: number, b: number): number {return a b } console.log(sum(1, 2))有…...

T2 小美的平衡矩阵(25分) - 美团编程题 题解
考试平台: 牛客网 题目类型: 30道单选题(60分) 2 道编程题 (15分 25分) 考试时间: 2024-03-09 (两小时) 题目描述 小美拿到了一个n*n的矩阵,其中每个元素是…...

13:大数据与Hadoop|分布式文件系统|分布式Hadoop集群
大数据与Hadoop|分布式文件系统|分布式Hadoop集群 Hadoop部署Hadoop HDFS分布式文件系统HDFS部署步骤一:环境准备HDFS配置文件 查官方手册配置Hadoop集群 日志与排错 mapreduce 分布式离线计算框架YARN集群资源管理系统步骤一:安装…...
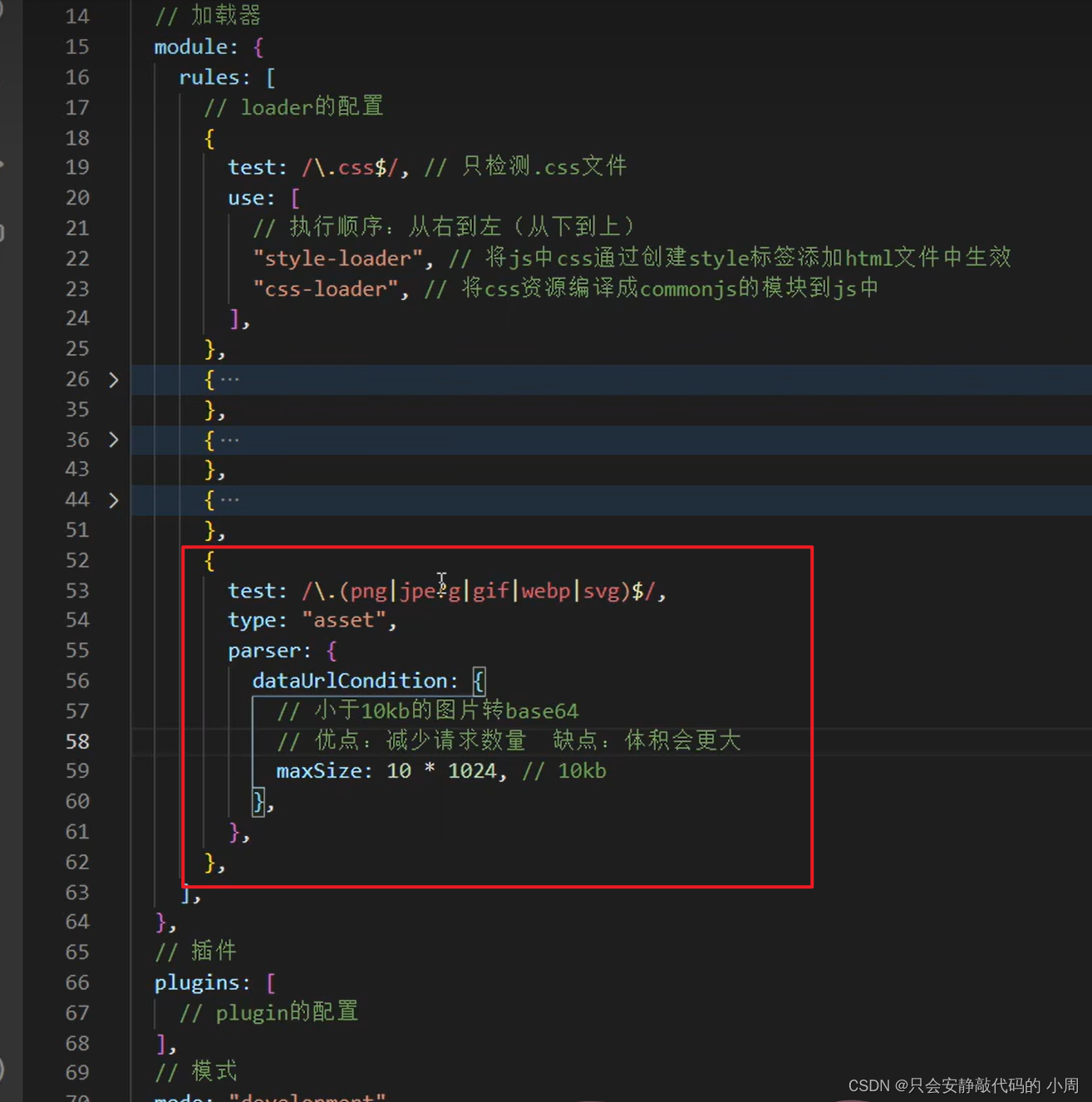
前端知识点、技巧、webpack、性能优化(持续更新~)
1、 请求太多 页面加载慢 (webpack性能优化) 可以把 图片转换成 base64 放在src里面 减少服务器请求 但是图片会稍微大一点点 以上的方法不需要一个一个自己转化 可以在webpack 进行 性能优化 (官网有详细描述)...

红队专题-开源漏扫-巡风xunfeng源码剖析与应用
开源漏扫-巡风xunfeng 介绍主体两部分:网络资产识别引擎,漏洞检测引擎。代码赏析插件编写JSON标示符Python脚本此外系统内嵌了辅助验证功能文件结构功能 模块添加IP三. 进行扫描在这里插入图片描述 )
Claude读论文系列(十)
精读笔记:CoDe-R CoDe-R: Refining Decompiler Output with LLMs via Rationale Guidance and Adaptive Inference arXiv: 2604.12913 | cs.SE / cs.AI / cs.CR 会议:IJCNN 2026(已收录) 机构:未标注(第一作…...

Qwen3-14B企业级API网关设计:实现高可用、可扩展的AI服务
Qwen3-14B企业级API网关设计:实现高可用、可扩展的AI服务 1. 企业级AI服务的挑战与机遇 在数字化转型浪潮中,大型语言模型如Qwen3-14B正成为企业智能化转型的核心引擎。然而,直接将模型暴露给业务系统会面临诸多挑战:突发流量可…...

效果实测:AI全身全息感知镜像在复杂动作下的识别精度展示
效果实测:AI全身全息感知镜像在复杂动作下的识别精度展示 1. 引言:全息感知技术的突破性进展 在虚拟现实、智能健身和远程协作等新兴领域,精准捕捉人体动作一直是个技术难题。传统方案要么需要昂贵的专业设备,要么只能识别单一维…...

SDMatte效果深度评测:复杂人像与发丝级抠图的惊艳表现
SDMatte效果深度评测:复杂人像与发丝级抠图的惊艳表现 1. 开篇:重新定义图像抠图标准 当你在电商平台看到完美无瑕的商品展示图,或者在电影中看到主角与虚拟场景无缝融合时,背后都离不开一项关键技术——图像抠图。传统抠图工具…...

【王炸组合】Hermes Agent 官方 UI 发布:本地白嫖 Google Gemma 4,零成本打造最强微信 AI 助手
前言如果说 2025 年是 AI 大模型的爆发年,那么 2026 年 4 月就是“个人 AI 智能体”的普及元年。随着 Gemma 4(Google 4月2日刚刚发布,31B 性能直逼 GPT-4o)的开源,以及 Hermes Agent 终于告别了繁琐的命令行、发布了正…...

鸣潮自动化终极指南:如何用ok-ww实现智能自动战斗与资源收集
鸣潮自动化终极指南:如何用ok-ww实现智能自动战斗与资源收集 【免费下载链接】ok-wuthering-waves 鸣潮 后台自动战斗 自动刷声骸 一键日常 Automation for Wuthering Waves 项目地址: https://gitcode.com/GitHub_Trending/ok/ok-wuthering-waves 鸣潮自动化…...

【卷卷观察】Vibe Coding 时代:有些人已经在用 AI 写代码,有些人还在争论 AI 能不能写代码
结论先说:Vibe Coding 这事,已经不是"趋势"了,是既成事实。92% 的美国开发者每天在用,41% 的代码是 AI 生成的。但这篇文章不想重复这些数字——数字你网上随便都能查到。我想聊的是:这事到底意味着什么&…...

Canvas水印实战:5分钟搞定前端图片防盗,附完整代码与避坑指南
Canvas水印实战:5分钟实现前端图片版权保护 在数字内容爆炸式增长的今天,图片盗用已成为困扰创作者的核心痛点。最近一位独立摄影师发现,其发布于社交平台的作品被某电商商家直接盗用,导致每月损失近万元订单。这样的案例并非孤例…...
告别DrawCall卡顿!Unity 2022最新Sprite Atlas图集打包保姆级教程(含旧版本迁移指南)
Unity 2022 Sprite Atlas图集优化全攻略:从原理到性能调优实战 最近在优化一个Unity项目时,发现UI界面在低端设备上频繁出现卡顿。通过Profiler分析,发现DrawCall数量高达200,而其中大部分都来自UI精灵的渲染。这让我重新审视了Sp…...

R3nzSkin国服换肤工具:英雄联盟国服免费皮肤修改器完整教程
R3nzSkin国服换肤工具:英雄联盟国服免费皮肤修改器完整教程 【免费下载链接】R3nzSkin-For-China-Server Skin changer for League of Legends (LOL) 项目地址: https://gitcode.com/gh_mirrors/r3/R3nzSkin-For-China-Server R3nzSkin国服特供版是一款专为英…...