STM32 学习10 PWM输出
STM32 学习10 PWM输出
- 一、PWM简介
- 1. PWM的概念
- 2. PWM的工作原理
- 3. PWM 常用的应用场景
- 二、一些概念
- 1. 频率
- 2. 占空比
- 三、STM32F1 PWM介绍
- 1. 定时器与寄存器
- (1)**自动重装载寄存器(ARR)**:
- (2)**比较寄存器(CCR)**:
- 2. PWM的输出模式
- (1)PWM模式1
- (2)PWM模式2
- 3. 边沿对齐与中心对齐
- (1)边沿对齐模式
- (2)中心对齐模式
- 四、PWM输出配置步骤
- 1. 使能定时器及端口时钟
- 2. 定时器的重映像
- (1)定时器4复用功能重映像
- (2)定时器3复用功能重映像
- (3) 定时器2复用功能重映像
- 3. 输出端口复用
- 4. 初始化定时器参数
- 5. 初始化PWM输出参数
- 6. 开启定时器
- 7. 修改TIMx_CCRx的值控制占空比
- 8. 使能 TIMx 在 CCRx 上的预装载寄存器
- 9. 使能 TIMx 在 ARR上的预装载寄存器允许位
- 10. 设置 MOE位
- 五、代码示例
- 1. pwm_utils.h
- 2. pwm_utils.c
- 3. main函数实现
一、PWM简介
1. PWM的概念
PWM的全称是脉冲宽度调制(Pulse Width Modulation),是一种控制模拟信号的方法。它通过改变脉冲的宽度来控制模拟信号的平均值。
2. PWM的工作原理
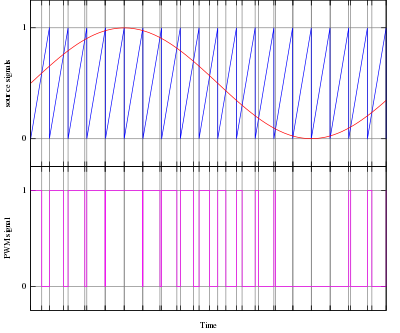
PWM的工作原理是将一个周期性的脉冲信号与一个控制信号进行比较。当控制信号大于脉冲信号时,输出高电平;当控制信号小于脉冲信号时,输出低电平。通过改变脉冲信号的宽度,可以控制输出信号的平均值。
输出信号的平均值连在一起,可以达到模拟信号的效果,如下图所示:
3. PWM 常用的应用场景
- 电机控制:用于控制电机的速度和方向;
- 照明控制:用于控制灯光的亮度;
- 电源管理:用于控制电源的输出电压;
- 音频控制:用于控制声音的大小。
二、一些概念
1. 频率
PWM波形在单位时间内重复出现的次数。
2. 占空比
PWM波形中高电平信号所占的比例。
三、STM32F1 PWM介绍
1. 定时器与寄存器
STM32F1除了基本定时器TIM6和TIM7,其它定时器都可以产生PWM输出。其中:
- TIM1和TIM8:均可同时产生7路PWM输出;
- 其它通用定时器:均可同时产生4路PWM输出。
在STM32微控制器中,生成PWM信号通常涉及到自动重装载寄存器(ARR)和比较寄存器(CCR)两个重要的寄存器。
(1)自动重装载寄存器(ARR):
- 通过修改ARR的值,可以调节PWM信号的周期,从而改变PWM信号的频率。
- 当ARR增加时,整个PWM信号的周期增加,导致PWM信号的频率降低。
(2)比较寄存器(CCR):
- 通过修改CCR的值,可以调节PWM信号的占空比,从而改变PWM信号的高电平持续时间。
- CCR的值通常应该小于ARR的值,以确保PWM信号的占空比在0到100%之间。
- 当CCR增加时,高电平部分的持续时间增加,导致PWM信号的占空比增加。
2. PWM的输出模式
PWM输出模式一共8种,常用的是PWM1和PWM2,其用法差不多,区别如下:
下表是PWM1和PWM2的区别:
(1)PWM模式1
在该模式下,定时器的计数器从0开始递增,
- 当计数器的值小于CCR时,输出为高电平;
- 当计数器的值大于等于CCR时,输出为低电平;
- 在计数器达到ARR时,产生一个更新事件,计数器重新从0开始计数。
这种模式下,PWM信号的周期由ARR决定,占空比由CCR决定。
(2)PWM模式2
与PWM模式1相比,PWM模式2输出有效性正好是相反的。
下表是PWM1和PWM2的比较:
| 模式 | CNT 计算方式 | CNT<CCR | CNT>CCR |
|---|---|---|---|
| PWM1 | 递增 | 通道CH有效 | 通道CH无效 |
| PWM1 | 递减 | 通道CH无效 | 通道CH有效 |
| PWM2 | 递增 | 通道CH无效 | 通道CH有效 |
| PWM2 | 递减 | 通道CH有效 | 通道CH无效 |
3. 边沿对齐与中心对齐
(1)边沿对齐模式
- 在边沿对齐模式下,PWM信号的起始位置位于PWM周期的起始边沿(即ARR),然后递增至CCR,再递增至ARR,最后重复此过程。
- PWM信号的高电平和低电平都与PWM周期的边沿对齐,即从PWM周期的起始边沿开始。
- 边沿对齐模式通常用于需要高精度输出的应用,例如需要精确控制PWM信号的起始和终止时间的应用场景。
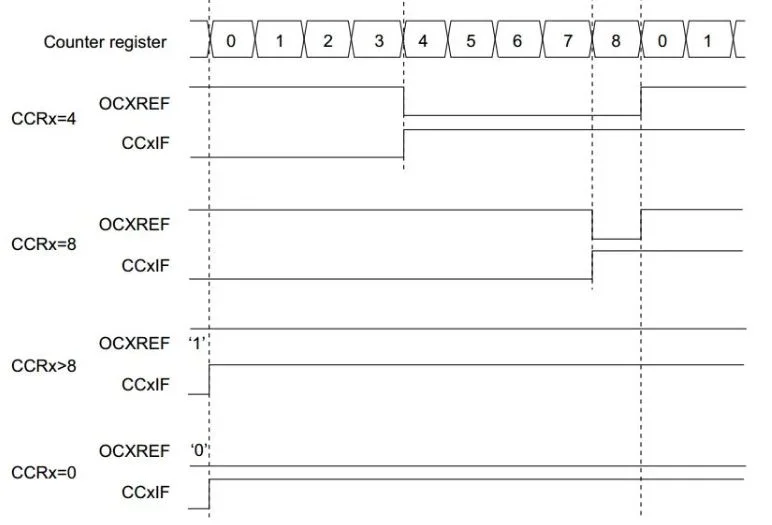
以上图为例,TIMx_CR1寄存器的DIR位为低时,递增计数,设ARR=8,当CCRx=4时: - CNT从0增至3的时候,输出PWM参考信号0CxREF为有效的高电平;
- CNT从4到8的时候,0CxREF输出为低电平;
0CXREF表示定时器的比较器
(2)中心对齐模式
- 在中心对齐模式下,PWM信号的起始位置位于PWM周期的中间,然后递增至CCR,再递减至0,再重复此过程。
- PWM信号的高电平和低电平都与PWM周期的中心对齐,即从PWM周期的中间开始。
- 中心对齐模式通常用于需要调节占空比范围较大的应用,例如需要在PWM周期内任意调节占空比的应用场景。由于PWM信号的起始位置位于PWM周期的中间,因此可以实现更宽范围的占空比调节。
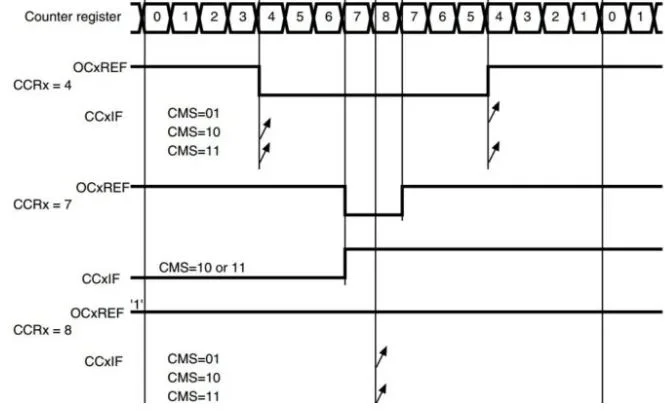
以上图为例,设ARR=8,当CCRx=4时,
- 当CNT<CCRx,输出为有效信号高电平 ;
- 当CNT>CCRx,输出为有效信号低电平;
四、PWM输出配置步骤
PWM 的配置在库文件 time.c 中。
1. 使能定时器及端口时钟
下面是使能设置代码:
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);2. 定时器的重映像
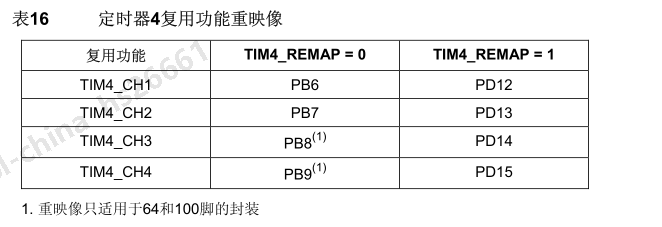
后面示例的 PWM 需要配置引脚的复用功能(重映像),定时器的重映像可在《STM32F10x参考手册》查询,摘录如下:
(1)定时器4复用功能重映像
(2)定时器3复用功能重映像

(3) 定时器2复用功能重映像
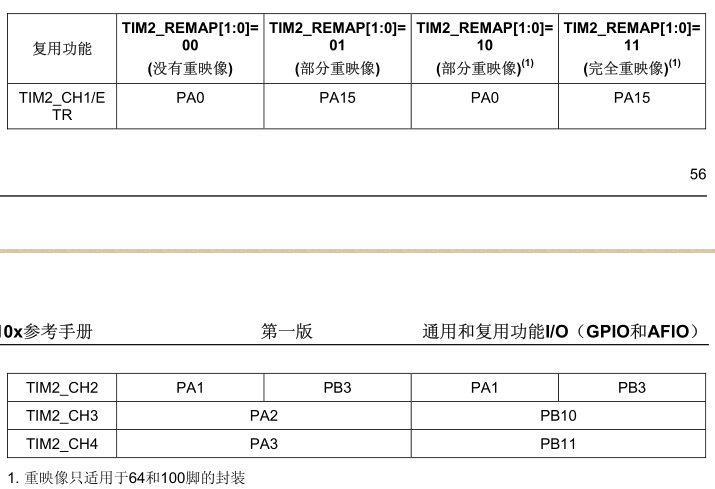
以使用 TIM3 的通道1为例,它默认是在PA6引脚上,它完全重映像是在PC6,后面使用的开发板上原理图示:
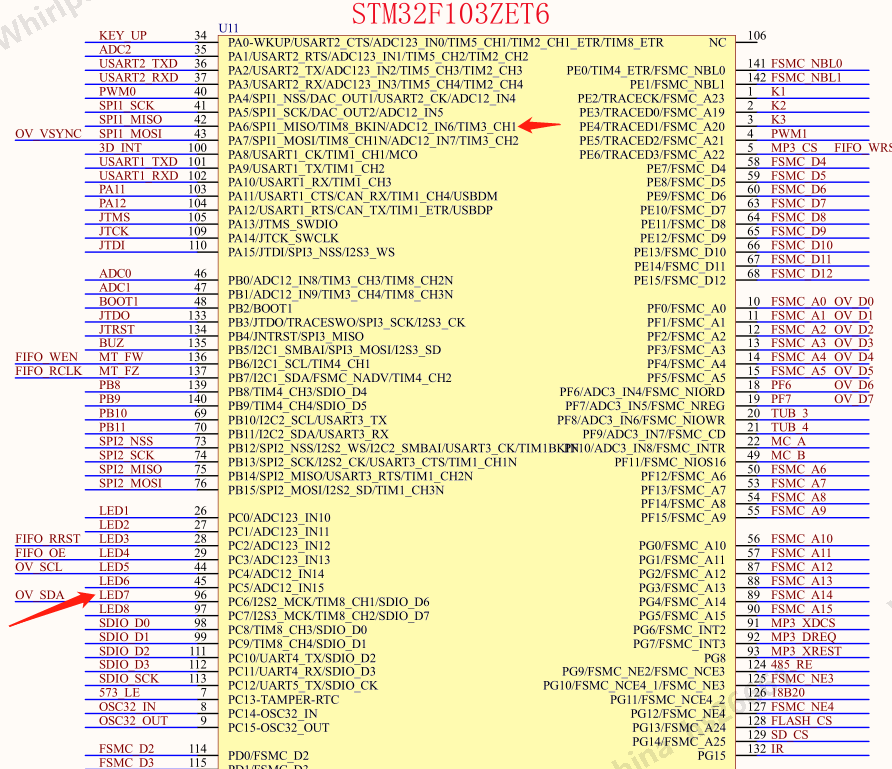
示例代码将使用PC6输出TIM3的通道1 PWM波。
代码示例:
// 设置 TIM3 完全重映像
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE);
3. 输出端口复用
在输出PWM信号时,通常需要考虑信号的稳定性、噪声抑制以及输出电流的能力等因素。复用推挽输出是一种常见的配置方式。
// 复用推挽输出
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
4. 初始化定时器参数
包括 : 自动重载值、分频系数、计数方式等。
void TIM_TimeBaseInit(TIM_TypeDef*TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStructure)
5. 初始化PWM输出参数
包括 :PWM 模式、输出极性、使能等。
void TIM_OCxInit(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStructure);// 结构体定义
typedef struct
{uint16_t TIM_OCMode; // 比较输出模式uint16_t TIM_OutputState; // 比较输出使能uint16_t TIME_OutputNState: // 比较互补输出使能uint32_t TIM_Pulse; // 脉冲宽度 0~65535/*** 输出极性* * TIM_OCPolarity_High: 高电平有效* * TIM_OCPolarity_Low: 低电平有效*/uint16_t TIM_OCPolarity;/*** 互补比较输出极性* * TIM_OCNPolarity_High: 高电平有效* * TIM_OCNPolarity_Low: 低电平有效*/ uint16_t TIM_OCNPolarity;/*** 空闲状态下比较输出状态* * TIM_OCIdleState_Set: 置位* * TIM_OCIdleState_Reset: 复位*/ uint16_t TIM_OCIdleState;/*** 空闲状态下比较输出状态* * TIM_OCNIdleState_Set: 置位* * TIM_OCNIdleState_Reset: 复位*/uint16_t TIM_OCNIdleState;
} TIM_OCInitTypeDef;6. 开启定时器
// NewState: 新的状态,可以是 ENABLE 或 DISABLE。
void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState)
7. 修改TIMx_CCRx的值控制占空比
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint32_t Compare1);
8. 使能 TIMx 在 CCRx 上的预装载寄存器
// 参数 TIM_OCPreload 可为 TIM_OCPreload_Enable、TIM_OCPreload_Disable
void TIM_OCxPreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
9. 使能 TIMx 在 ARR上的预装载寄存器允许位
// NewState: 新的状态,可以是 ENABLE 或 DISABLE。
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
10. 设置 MOE位
对于高级定时器,需要设置MOE位。
MOE 位,全称 Master Output Enable,是定时器控制寄存器 1 (TIMx->CR1) 中的一个控制位(15位),用于使能或禁用定时器主输出。
- MOE 位可以用于控制 PWM 输出的使能和禁用。
- 可以使用 MOE 位来实现软启动和软停止功能。
- 可以使用 MOE 位来实现故障保护功能。
void TIM_CtrlPWMOutputs(TIM_TypeDef* TIMx, FunctionalState NewState);
五、代码示例
本实验对TIM3控制,使用通道1, 对TIM3_CH1重映像到PC6引脚,控制PC6上接的LED亮度。
示例程序控制LED呼吸灯效果,渐渐变亮,再渐渐变暗。
1. pwm_utils.h
#ifndef __PWM_UTILS_H__
#define __PWM_UTILS_H__#include "stm32f10x.h"void tim3_ch1_pwm_init(u16 preriod, u16 prescaler);
void tim3_ch1_pwm_set_duty(u16 duty);
#endif2. pwm_utils.c
#include "pwm_utils.h"
#include "led_utils.h"/*** @brief 定时器3初始化
*/
void tim3_ch1_pwm_init(u16 preriod, u16 prescaler){// 使能TIM3时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);// 使能LED所在端口的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);// 使能AFIORCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);GPIO_InitTypeDef GPIO_InitStructure; //定义GPIO初始化结构体GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置输出速度为50MHzGPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //设置为推挽输出模式GPIO_Init(LED_PORT, &GPIO_InitStructure); //初始化 LED_PORT// 管脚重映像GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE);// 定时器初始化TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_TimeBaseStructure.TIM_Period = preriod; //设置自动重装载寄存器周期值TIM_TimeBaseStructure.TIM_Prescaler = prescaler; //设置时钟预分频数TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分频因子TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;// 初始化TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);// PWM模式1TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性高TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OC1Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC1// 使能TIM3的CCR1寄存器预装载TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);// 使能TIM3的ARR寄存器预装载TIM_ARRPreloadConfig(TIM3, ENABLE);// 使能TIM3TIM_Cmd(TIM3, ENABLE);
}
void tim3_ch1_pwm_set_duty(u16 duty){// 设置定时器3的PWM占空比TIM_SetCompare1(TIM3, duty);
}3. main函数实现
#include "gpio_utils.h"
#include "stm32f10x.h"
#include "sys_tick_utils.h"
#include "led_utils.h"
#include "pwm_utils.h"// 主函数
int main(void)
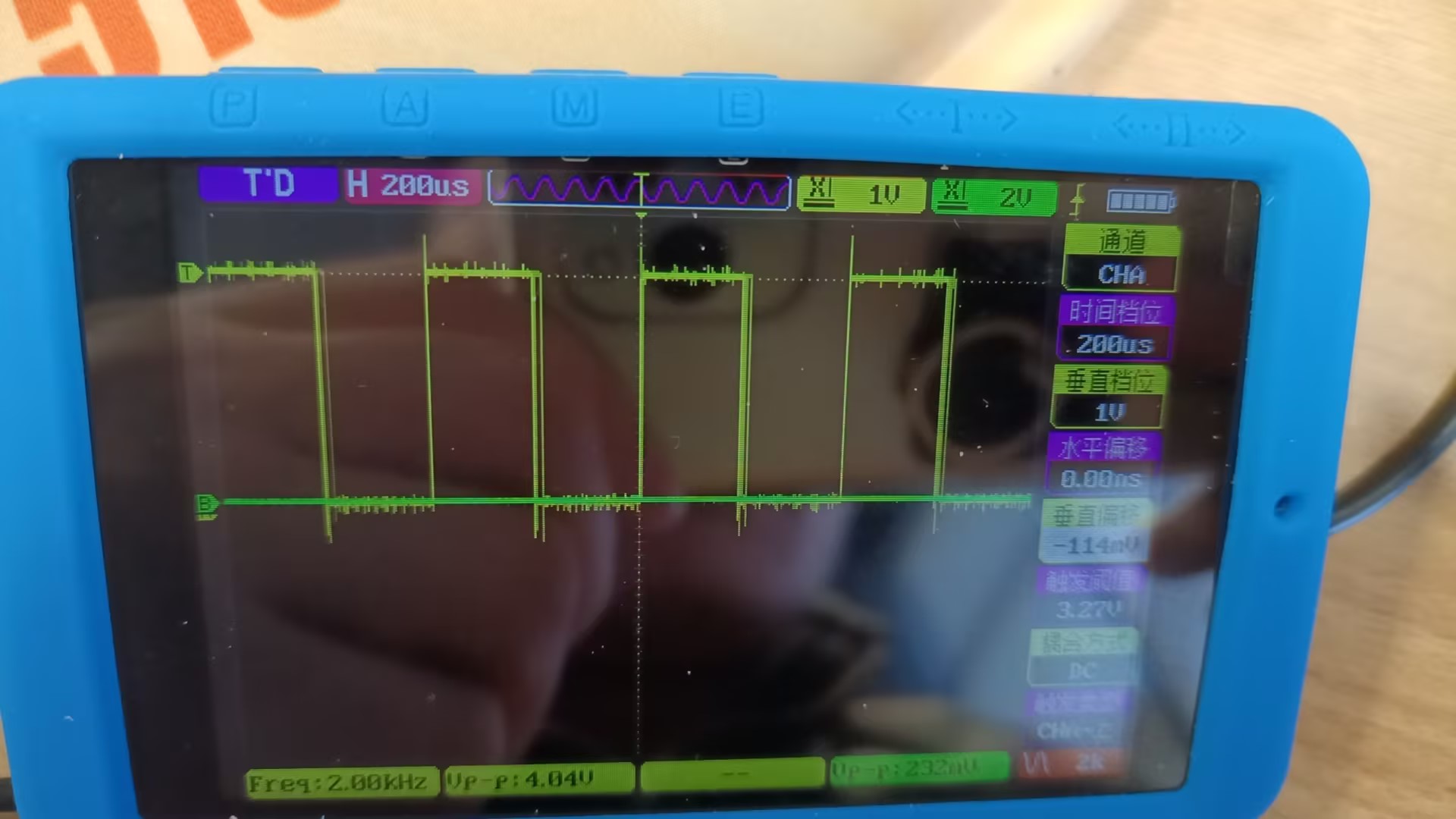
{// led 初始化custom_led_init();// tick 初始化sys_tick_init(72);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// PWM 初始化,2Ktim3_ch1_pwm_init(500, 72-1);led_all_off();int i = 0;u8 direction=0;while (1) //无限循环{tim3_ch1_pwm_set_duty(i);if(direction==0){i++;}else{i--;}if(i>300){direction = 1;}else if(i<1){direction = 0;}delay_ms(10);}
}实测PC6的波形是一直变化中:
本文代码开源地址:
https://gitee.com/xundh/stm32_arm_learn
相关文章:
STM32 学习10 PWM输出
STM32 学习10 PWM输出 一、PWM简介1. PWM的概念2. PWM的工作原理3. PWM 常用的应用场景 二、一些概念1. 频率2. 占空比 三、STM32F1 PWM介绍1. 定时器与寄存器(1)**自动重装载寄存器(ARR)**:(2)…...
)
SQL语言(数据库编程)
一.select查询 在数据库编程中,SQL(Structured Query Language,结构化查询语言)是一种用于管理关系数据库管理系统(RDBMS)的标准编程语言。其中,SELECT 是 SQL 中最常用的查询语句,用于从数据库表中检索数据。 下面是一个基本的 SELECT 查询的示例: SELECT column1…...
中的多态性)
C#面向对象(OOPs)中的多态性
本文由 简悦 SimpRead 转码, 原文地址 mp.weixin.qq.com C#面向对象(OOPs)中的多态性 概述:在编程语言和类型理论中,多态性是为不同类型的实体提供单个接口,或者使用单个符号来表示多个不同的类型。多态对象是能够呈现多种形式的…...
(二十一)从零开始搭建k8s集群——kubernates核心组件及功能介绍
前言 Kubernetes是一个可移植、可扩展、开源的平台,用于管理容器化的工作负载和服务,它促进了声明性配置和自动化。Kubernetes容器可以持续开发、集成和部署:可靠且频繁地构建和部署容器镜像,快速有效地回滚;开发与运…...
[云原生] k8s之存储卷
一、emptyDir存储卷 当Pod被分配给节点时,首先创建emptyDir卷,并且只要该Pod在该节点上运行,该卷就会存在。正如卷的名字所述,它最初是空的。Pod 中的容器可以读取和写入emptyDir卷中的相同文件,尽管该卷可以挂载到每…...
【PCL】(二十七)基于法线差的点云分割
(二十七)基于法线差的点云分割 图片来源 提出这个方法的论文:Difference of Normals as a Multi-Scale Operator in Unorganized Point Clouds 算法流程: 在大尺度的范围内(半径 r 1 r_1 r1)估计每个点…...

智慧公厕系统的组成部分有什么?
智慧公厕系统是现代城市管理中一项重要的创新,利用物联网、互联网、大数据、云计算、自动化控制等先进的技术手段,提供高效便捷的公厕服务。从信息系统的角度来看,智慧公厕系统主要由硬件、软件和网络组成,硬件、软件和网络三大部…...

[数据集][目标检测]芒果叶病害数据集VOC+YOLO格式4000张5类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):4000 标注数量(xml文件个数):4000 标注数量(txt文件个数):4000 标注…...
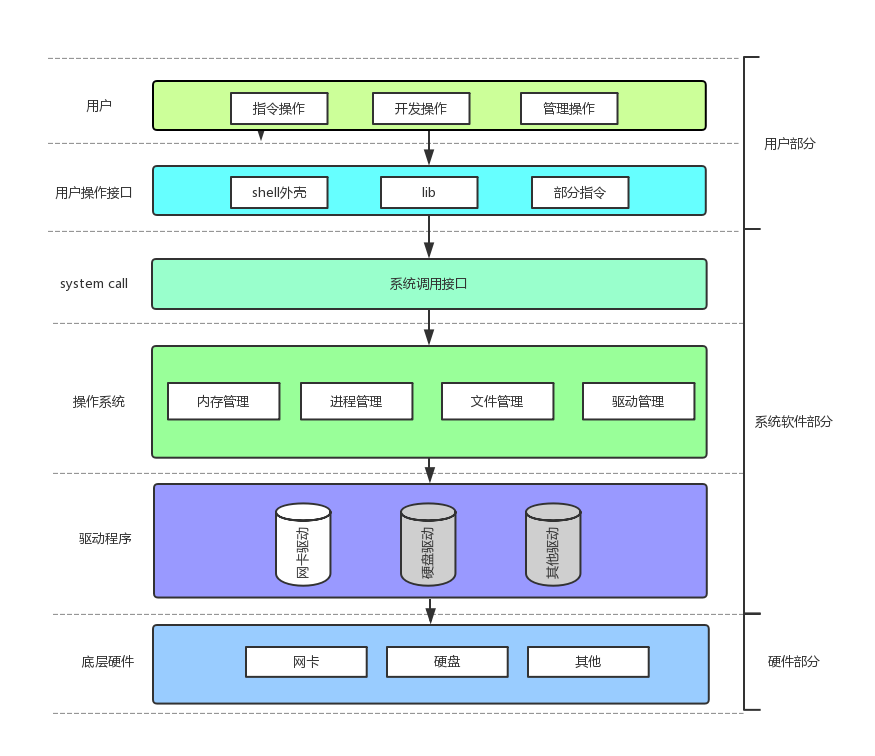
Linux: 预备
计算机结构基础 操作系统: 内核 (管理软硬件) shell(给用户使用操作系统的方式) 操作系统的目标 对硬件抽象 原因:操作系统是对软硬件资源管理的应用软件抽象:内存管理, 进程管理, 文件管理, 驱动管理软件:驱动程序(给软件提供访问硬件的软件)硬件:磁盘(对应文件), 网卡等隔离…...

ChatGPT 升级出现「我们未能验证您的支付方式/we are unable to authenticate」怎么办?
ChatGPT 升级出现「我们未能验证您的支付方式/we are unable to authenticate」怎么办? 在订阅 ChatGPT Plus 时,有时候会出现以下报错 : We are unable to authenticate your payment method. 我们未能验证您的支付方式。 出现 unable to a…...
JavaWeb - 3 - JavaScript(JS)
JavaScript(JS)官方参考文档:JavaScript 教程 JavaScript(简称:JS)是一门跨平台、面向对象的脚本语言,是用来控制网页行为的,它能使网页可交互(脚本语言就不需要编译,直接通过浏览器…...
基于springboot+vue的美食烹饪互动平台
博主主页:猫头鹰源码 博主简介:Java领域优质创作者、CSDN博客专家、阿里云专家博主、公司架构师、全网粉丝5万、专注Java技术领域和毕业设计项目实战,欢迎高校老师\讲师\同行交流合作 主要内容:毕业设计(Javaweb项目|小程序|Pyt…...

linux中操作服务器常用命令
在Linux中操作服务器时,常用的命令包括: ls:列出目录内容。 cd:切换目录。 pwd:显示当前所在的目录路径。 mkdir:创建一个新的目录。 rmdir:删除一个空的目录。 cp:复制文件或目录。…...

最简k8s部署(AWS Load Balancer Controller使用)
问题 我需要在k8s集群里面部署springboot服务,通过k8s ingress访问集群内部的springboot服务,应该怎么做? 这里假设已经准备好k8s集群,而且也准备好springboot服务的运行镜像了。这里我们将精力放在k8s服务编排上面。 一图胜千言…...

差距拉开了!量化大厂最新业绩排行曝光!
经历了一月份的失落和二月份绝地反攻,量化大厂们的整体业绩备受关注。 而今年2月份的量化战绩,甚为关键! 毕竟市场指数“前低后高”,基金经理与投资人开年以来,共同经历了“惊心动魄”的考验。 量化大厂,…...
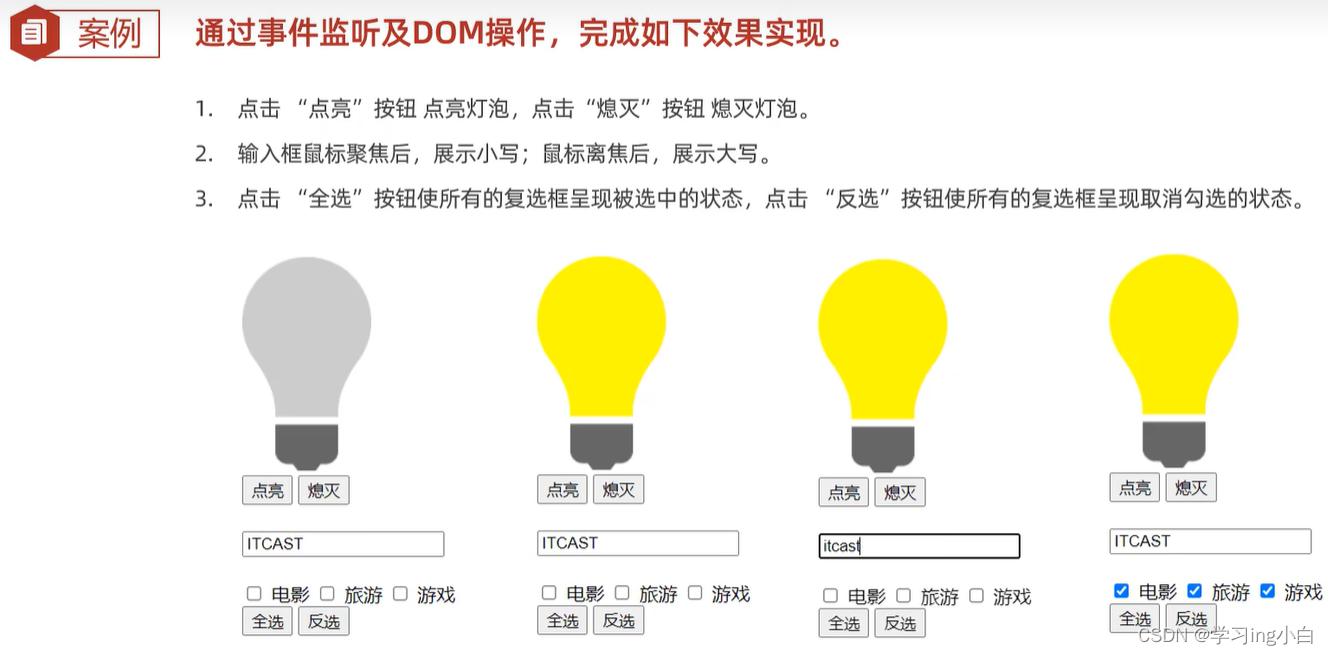
【Web前端】Vue核心基础
文章目录 1. Vue简介2. Vue官网使用指南3. 初识Vue3.1 搭建Vue开发环境3.2 HelloWorld案例3.3 el与data的两种写法3.4 MVVM模型3.5 模板语法 4. 数据绑定4.1 v-bind单向数据绑定4.2 v-model双向数据绑定 5. 事件处理5.1 v-on绑定事件5.2 事件修饰符5.3 键盘事件 6. 计算属性6.1…...

Linux操作系统项目上传Github代码仓库指南
文章目录 1 创建SSH key2.本地git的用户名和邮箱设置3.测试连接4.创建仓库5.终端项目上传 1 创建SSH key 1.登录github官网,点击个人头像,点击Settings,然后点击SSH and GPG keys,再点击New SSH key。 Title 可以随便取,但是 key 需要通过终端生成。 Linux终端执行…...

机器学习--循环神经网路(RNN)2
在这篇文章中,我们介绍一下其他的RNN。 一.深层RNN 循环神经网络的架构是可以任意设计的,之前提到的 RNN 只有一个隐藏层,但 RNN 也可以是深层的。比如把 xt 丢进去之后,它可以通过一个隐藏层,再通过第二个隐藏层&am…...
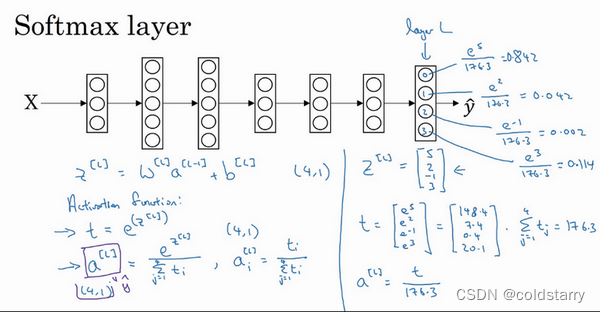
sheng的学习笔记-AI-多分类学习:ECOC,softmax
目录:sheng的学习笔记-AI目录-CSDN博客 基本术语: 若我们欲预测的是离散值,例如“好瓜”“坏瓜”,此类学习任务称为“分类”(classification); 若欲预测的是连续值,例如西瓜成熟度0.95、0.37,…...
ChatGPT Plus 支付出现「您的银行卡被拒绝/your card has been declined」怎么办?
ChatGPT Plus 支付出现「您的银行卡被拒绝/your card has been declined」怎么办? 在订阅 ChatGPT Plus 或者 OpenAI API 时,有时候会出现已下报错 : Your card has been declined. 您的银行卡被拒绝 出现这种错误,有以下几个解…...

nli-distilroberta-base新手入门:句子关系判断的3个实用场景
nli-distilroberta-base新手入门:句子关系判断的3个实用场景 1. 认识nli-distilroberta-base nli-distilroberta-base是一个基于DistilRoBERTa模型的自然语言推理(NLI)服务,专门用于判断两个句子之间的关系。它可以帮助我们快速分析文本之间的逻辑关联…...

量化策略回测必备:一份让TA-Lib的MACD/KDJ与通达信对齐的Python代码库
量化策略回测必备:让TA-Lib的MACD/KDJ与通达信严格对齐的工程实践 在量化交易领域,技术指标的计算一致性是策略回测可靠性的生命线。许多开发者都遇到过这样的困境:自己用TA-Lib计算的MACD指标与通达信软件显示的结果存在微妙差异,…...

别再死记硬背欧氏和曼哈顿距离了!用Python实战理解闵可夫斯基距离的万能公式
别再死记硬背欧氏和曼哈顿距离了!用Python实战理解闵可夫斯基距离的万能公式 刚接触机器学习时,面对各种距离公式总让人头疼——欧氏距离、曼哈顿距离、切比雪夫距离...每个公式看起来都不同,却又似乎有某种神秘联系。其实这些距离度量都属于…...

AGI在注塑、焊接、SMT三大高波动场景的真实ROI数据曝光:SITS2026证实——第187小时起开始盈亏平衡
第一章:SITS2026案例:AGI在制造业的应用 2026奇点智能技术大会(https://ml-summit.org) 在2026奇点智能技术大会(SITS2026)公布的标杆案例中,德国博世与上海振华重工联合部署的AGI驱动柔性产线系统“SITS-Fabricate”…...


Gemini出点问题-----解决
遇到这个问题,网址栏目输入 后面加上 /gems/createwww.gemini.com/gems/create命个名字就好了 ,点击左上角的报错,就开启新对话了 基本跟什么服务地址,ip干净不干净没啥关系(我都试过了),…...

从M516 BCM的休眠电流与唤醒策略,聊聊如何让汽车电瓶更耐用
从M516 BCM的休眠电流与唤醒策略,聊聊如何让汽车电瓶更耐用 你是否遇到过这样的尴尬场景:出差一周回来,发现爱车竟然无法启动,仪表盘一片漆黑?这背后往往与车身控制器(BCM)的功耗管理设计密切相…...

HarmonyOS布局避坑指南:为什么你的Column和Row总对不齐?
HarmonyOS布局避坑指南:为什么你的Column和Row总对不齐? 在HarmonyOS应用开发中,布局是构建用户界面的基础。然而,许多开发者在实际项目中常常遇到Column和Row组件对不齐的问题,导致界面显示效果不尽如人意。本文将深入…...

从热电阻测量到4-20mA输出:一个运放项目实战中的电源、滤波与保护电路设计全解析
从热电阻测量到4-20mA输出:工业级信号链设计的工程实践 在工业传感器接口开发中,将物理量转换为标准电流信号是最基础却最考验工程师功底的环节。想象一下炼油厂里数百个PT100温度传感器需要将-50℃~200℃的测量值转换为4-20mA信号,通过百米电…...
)
RK3399固件备份与恢复全攻略:从分区表解析到实战操作(Ubuntu环境)
RK3399固件备份与恢复全攻略:从分区表解析到实战操作(Ubuntu环境) 在嵌入式开发领域,RK3399作为瑞芯微电子的旗舰级处理器,凭借其双核Cortex-A72四核Cortex-A53的六核架构和强大的GPU性能,被广泛应用于单板…...