小型双轮差速底盘双灰度循迹功能的实现
1. 功能说明
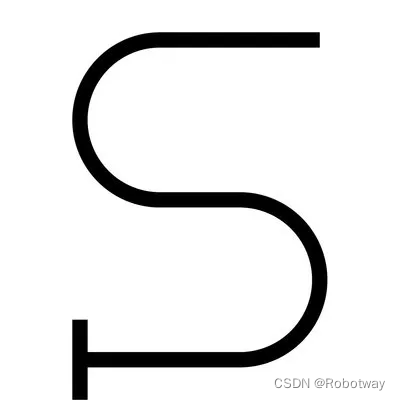
在机器人车体上安装2个 灰度传感器 ,实现机器人按照下图所指定的路线进行导航运动,来模拟仓库物流机器人按指定路线行进的工作过程。
2. 使用样机
本实验使用的样机为R023e样机。

3. 功能实现
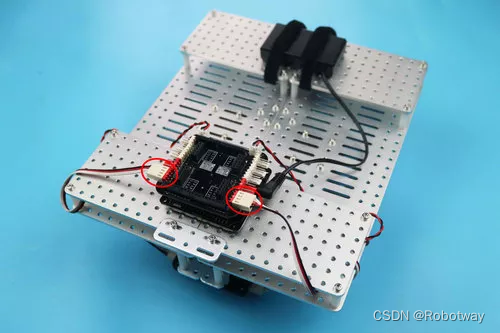
3.1 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra(兼容Arduino Uno) |
| 扩展板 | SH-01外围电路扩展板(与Bigfish扩展板相似) |
| 传感器 | 灰度传感器 |
| 电池 | 7.4V锂电池 |
电路连接说明:
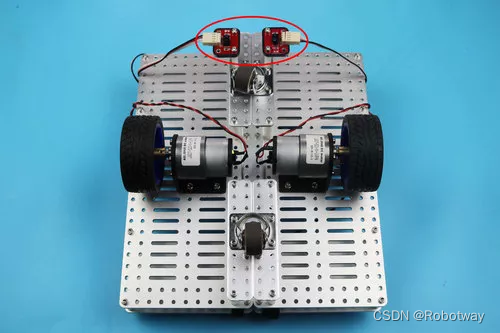
① 电机连在D6,D10及D5,D9接口上;
② 2个灰度传感器分别接在扩展板的传感器接口A0、A4上。
3.2 编写程序
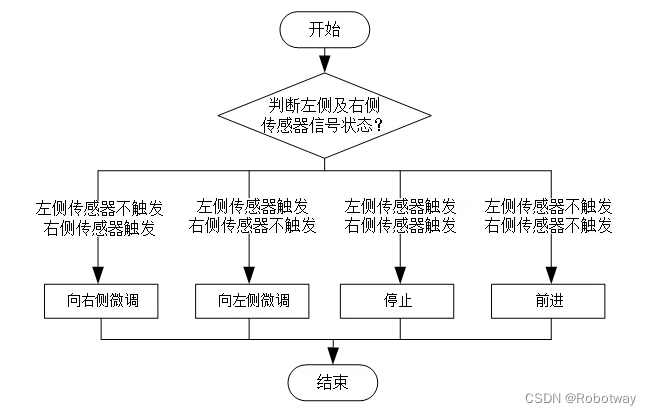
传感器触发情况、小车行驶状态、对应行为策略表:
| 传感器1 | 传感器2 | 小车状态 | 动作 |
| 0 | 1 | 小车左偏 | 向右调整 |
| 1 | 0 | 小车右偏 | 向左调整 |
| 1 | 1 | 到达终点 | 停止 |
| 0 | 0 | 正常 | 前进 |
① 根据实验内容,利用多分支结构设计出程序流程图。
② 根据设计好的程序流程图进行编程,编写并烧录以下程序(blackline_4if.ino),该程序将实现演示视频中的动作。
编程环境:Arduino 1.8.19
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-02-09 https://www.robotway.com/ ------------------------------------------------------------------------------------*/void turnleft_slow();void forward();void carstop();void turnright_slow();void setup(){pinMode( 18, INPUT);pinMode( 14, INPUT);pinMode( 10, OUTPUT);pinMode( 6, OUTPUT);pinMode( 5, OUTPUT);pinMode( 9, OUTPUT);}void loop(){if (( digitalRead(14) && digitalRead(18) )){forward();}if (( !( digitalRead(14) ) && digitalRead(18) )){turnleft_slow();}if (( digitalRead(14) && !( digitalRead(18) ) )){turnright_slow();}if (( !( digitalRead(14) ) && !( digitalRead(18) ) )){carstop();delay( 5000 );}}void turnright_slow(){analogWrite(6 , 80);analogWrite(10 , 0);analogWrite(5 , 0);analogWrite(9 , 0);}void carstop(){analogWrite(6 , 0);analogWrite(10 , 0);analogWrite(5 , 0);analogWrite(9 , 0);}void turnleft_slow(){analogWrite(6 , 0);analogWrite(10 , 0);analogWrite(5 , 80);analogWrite(9 , 0);}void forward(){analogWrite(6 , 80);analogWrite(10 , 0);analogWrite(5 , 80);analogWrite(9 , 0);}也可以使用if…else嵌套写法(blackline_ifelse.ino)。
void stop();void left();void right();void forwards();void setup(){pinMode( 18, INPUT);pinMode( 14, INPUT);pinMode( 10, OUTPUT);pinMode( 6, OUTPUT);pinMode( 5, OUTPUT);pinMode( 9, OUTPUT);}void loop(){if (( !( digitalRead(14) ) && digitalRead(18) )){right();}else{if (( digitalRead(14) && !( digitalRead(18) ) )){left();}else{if (( !( digitalRead(14) ) && !( digitalRead(18) ) )){stop();}else{forwards();}}}}void stop(){analogWrite(5 , 0);analogWrite(9 , 0);analogWrite(6 , 0);analogWrite(10 , 0);}void right(){analogWrite(5 , 150);analogWrite(9 , 0);analogWrite(6 , 0);analogWrite(10 , 150);}void forwards(){analogWrite(5 , 150);analogWrite(9 , 0);analogWrite(6 , 150);analogWrite(10 , 0);}void left(){analogWrite(5 , 0);analogWrite(9 , 150);analogWrite(6 , 150);analogWrite(10 , 0);}
资料内容详见 小型双轮差速底盘-双灰度循迹
相关文章:
小型双轮差速底盘双灰度循迹功能的实现
1. 功能说明 在机器人车体上安装2个 灰度传感器 ,实现机器人按照下图所指定的路线进行导航运动,来模拟仓库物流机器人按指定路线行进的工作过程。 2. 使用样机 本实验使用的样机为R023e样机。 3. 功能实现 3.1 电子硬件 在这个示例中,我们采…...

电子签名?玩具罢了!
需要的前置知识:简单的canvas绘制线路过程 let canvas document.getElementById(id); //id为canvas标签元素的id,或通过其它方法获取标签 let ctx canvas.getContext(2d); //规定为2d绘制图片,即确定为2d画笔 ctx.strokeStyle "whit…...

【Spring Boot读取配置文件的方式】
Spring Boot 支持多种读取配置文件的方式,常用的方式有以下三种: application.properties: Spring Boot 默认会读取该文件作为应用的配置文件。可以在 src/main/resources 目录下创建该文件,并在其中配置应用的属性。 applicat…...

java学习路线规划
java学习路线规划 一、写在前面 兄弟,我整理了一下关于自己之前学习java的一些方向,给你归纳在这里,有空就来看看,希望对你有帮助。 二、java基础篇 1、认识java 了解java历史,大概看看发展史,安装…...
格密码学习笔记(二):连续极小、覆盖半径和平滑参数
文章目录最短距离和连续极小值距离函数和覆盖半径格的平滑参数致谢最短距离和连续极小值 除了行列式,格的另一个基本量是格上最短非零向量的长度,即格中最短距离,其定义为 λ1minx,y∈L,x≠y∥x−y∥minz∈L,z≠0∥z∥.\begin{aligned} …...
ios 通过搜索设备MAC地址绑定
最近做了一个物联网项目,涉及到了设备绑定配网这块,需要了解一下iOS BLE与设备绑定的相关知识点,第一次接触蓝牙相关的项目,所以开始熟悉蓝牙的相关信息。没有去深入研究BabyTooth库,只是感觉CoreBluetooth已经让我更好的理解整个流程这个物联网项目的设备绑定流程是…...

Python实现人脸识别,进行视频跟踪打码,羞羞的画面统统打上马赛克
哈喽兄弟们,我是轻松~ 今天我们来实现用Python自动对视频打马赛克前言准备工作代码实战效果展示最后前言 事情是这样的,昨天去表弟家,用了下他的电脑,不小心点到了他硬盘里隐藏的秘密,本来我只需要用几分钟电脑的&…...

vcf bed起始位置是0还是1
VCF 起始位置为1, POS - position: The reference position, with the 1st base having position 1. Positions are sorted numerically, in increasing order, within each reference sequence CHROM. It is permitted to have multiple records with the same POS. Telome…...
Hexo+live2d | 如何把live2d老婆放进自己的博客
参考:Hexo添加Live2D看板娘最新教程live2d-widgetlive2d-widget-models网页/博客Hexo添加live2d游戏角色看板娘,简易添加,碧蓝航线等live2d新型游戏角色模型(moc3)live2d-moc3jsdelivr方法1可以直接去看参考文章的第一部分的第一篇…...

【微信小程序】-- 页面导航 -- 导航传参(二十四)
💌 所属专栏:【微信小程序开发教程】 😀 作 者:我是夜阑的狗🐶 🚀 个人简介:一个正在努力学技术的CV工程师,专注基础和实战分享 ,欢迎咨询! &…...

Pytorch学习笔记#2: 搭建神经网络训练MNIST手写数字数据集
学习自https://pytorch.org/tutorials/beginner/basics/quickstart_tutorial.html 导入并预处理数据集 pytorch中数据导入和预处理主要用torch.utils.data.DataLoader 和 torch.utils.data.Dataset Dataset 存储样本及其相应的标签,DataLoader在数据上生成一个可迭…...

C语言 猜名次、猜凶手、杨辉三角题目详解
猜名次题目:5位运动员参加了10米台跳水比赛,有人让他们预测比赛结果:A选手说:B第二,我第三;B选手说:我第二,E第四;C选手说:我第一,D第二ÿ…...

蚁群算法负荷预测
%% 清空环境变量 clc clear close all format compact %% 网络结构建立 %% 清空环境变量 clc clear close all format compact %% 网络结构建立 %读取数据 dataxlsread(天气_电量_数据.xlsx,C12:J70);%前7列为每个时刻的发电量 最后列为天气 for i1:58 input(i,:)[data…...

ubuntu添加系统服务实现开机root权限运行
需求 开机自动运行程序(或脚本),需要以root权限运行但不输入密码,也不能将密码写入文件。 环境 Ubuntu 20.04 解决方案 添加系统服务,然后通过systemctl控制。 操作步骤 假设目标程序为/home/xxx/test 1、创建service配置文件 [Unit…...

【阅读笔记】你不知道的Javascript--类与类型委托3
目录类一些常见原理混入行为委托委托理论类与对象更妙的设计与语法类型冷门关键词typeof 防范机制值原生函数访问内部属性类 一些常见原理 在继承或者实例化时,JavaScript 的对象机制并不会自动执行复制行为; 多态:JS 中的多态,…...
文件服务设计
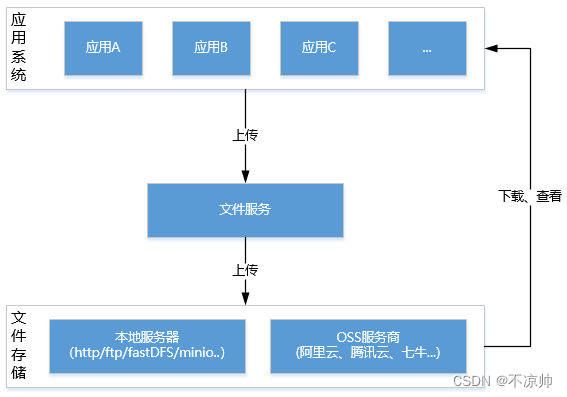
一、需求背景 文件的上传、下载功能是软件系统常见的功能,包括上传文件、下载文件、查看文件等。例如:电商系统中需要上传商品的图片、广告视频,办公系统中上传附件,社交类系统中上传用户头像等等。文件上传下载大致流程为&#…...

【批处理脚本】-1.22-字符串界定符号 ““
"><--点击返回「批处理BAT从入门到精通」总目录--> 共3页精讲(列举了所有字符串界定符号 ""的用法,图文并茂,通俗易懂) 在从事“嵌入式软件开发”和“Autosar工具开发软件”过程中,经常会在其集成开发环境IDE(CodeWarrior,S32K DS,Davinci,…...

【Flutter·学习实践·UI篇】基础且重要的UI知识
前言 参考学习官网:《Flutter实战第二版》 学习前先记住:Flutter 中万物皆为Widget,心中默念3次以上铭记于心。 这一点和开发语言Dart的变量一切皆是对象的概念,相互对应。 Widget 在前面的介绍中,我们知道在Flutt…...

【OpenCV】车牌自动识别算法的设计与实现
写目录一. 🦁 设计任务说明1.1 主要设计内容1.1.1 设计并实现车牌自动识别算法,基本功能要求1.1.2 参考资料1.1.3 参考界面布局1.2 开发该系统软件环境及使用的技术说明1.3 开发计划二. 🦁 系统设计2.1 功能分析2.1.1 车辆图像获取2.1.2 车牌…...

SpringBoot发送邮件
目录1. 获取授权码2. jar包引入3. 配置application4. 代码实现1. 获取授权码 以126邮箱为例,点开设置,选择POP3/SMTP/IMAP 开启POP3/SMTP服务,新增授权密码 扫码二维码,发送要求的短信内容到指定的号码即可,然后会返回…...

别再只懂install_github了!深入聊聊R包管理:GitHub PAT、依赖与Linux系统库的那些事儿
别再只懂install_github了!深入聊聊R包管理:GitHub PAT、依赖与Linux系统库的那些事儿 在数据科学和统计分析的世界里,R语言凭借其强大的包生态系统和活跃的开源社区,已经成为许多专业人士的首选工具。然而,当我们从个…...
)
Jetson Nano玩家必看:Windows下用Diskpart彻底格式化SD卡(解决烧录后不识别问题)
Jetson Nano玩家必备技能:Windows下彻底格式化SD卡的终极指南 当你兴奋地将Linux系统镜像烧录到SD卡,准备在Jetson Nano上大展拳脚时,却发现Windows资源管理器里那张卡"消失"了——这不是灵异事件,而是分区表变化导致的…...

StarRocks BE启动失败?别急着查网络,先看看你的CPU是不是AVX2指令集
StarRocks BE启动失败?可能是你的CPU在拖后腿 当你兴冲冲地准备部署StarRocks,却发现BE进程像幽灵一样启动即消失,日志文件也神秘失踪,这种挫败感我深有体会。大多数人的第一反应是检查网络配置或服务端口,但今天我要带…...

YouTube 视频翻译中文:基于 Whisper + FFmpeg 的自动化流水线实战
一、背景 YouTube 视频翻译中文,本质上是将外语视频通过语音识别(ASR)、文本翻译(NMT)、语音合成(TTS)三个环节处理后,重新合成为中文版本。每一个环节都有成熟的开源工具链支持&am…...

如何使用ubuntu搭建一个无盘PC启动服务器
启动windows,1. 安装tftp服务器sudo apt install tftpd-hpa2. 设置tftp,sudo systemctl restart tftpd-hpasudo nano /etc/default/tftpd-hpa# /etc/default/tftpd-hpaTFTP_USERNAME"tftp" TFTP_DIRECTORY"/srv/tftp" TFTP_ADDRESS":69" TFTP_OP…...

通过curl命令直接测试Taotoken聊天补全接口的配置与调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过curl命令直接测试Taotoken聊天补全接口的配置与调用 在对接大模型服务时,有时我们希望在引入完整SDK之前ÿ…...

SQLite高级优化实战
SQLite高级优化实战:从入门到千万级数据的性能调优指南 作者:Crown_22 | Hermes Agent 桌面程序开发者 前言 SQLite是世界上部署最广泛的数据库——每部手机、每个浏览器、每个Python安装都自带SQLite。很多人认为SQLite只是一个"轻量级"数据库,只适合小项目。但…...

构筑城市“数字底座”!全要素数据标准建设
城市运行管理服务平台的核心竞争力在于其建立了统一、规范的城市运行管理服务数据库。依据《城市运行管理服务平台数据标准》(CJ/T545),我们的技术方案实现了对城市管理全要素的数字化映射。这不仅仅是简单的数据录入,而是构建了一…...

图像处理入门避坑:拉普拉斯锐化中的‘标定’到底在做什么?用NumPy手撕一遍就懂了
图像处理入门避坑:拉普拉斯锐化中的‘标定’到底在做什么?用NumPy手撕一遍就懂了 当你第一次尝试用拉普拉斯算子锐化图像时,可能会遇到一个令人困惑的现象:明明按照教程写了代码,输出的却是一张全黑或全白的图片。这不…...

对比直接采购使用Taotoken Token Plan套餐在长期开发中的成本优势
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接采购与使用Taotoken Token Plan套餐在长期开发中的成本优势 在长期的技术项目开发中,模型API调用成本是团队必…...