扩散模型DDPM开源代码的剖析【对应公式与作者给的开源项目,diffusion model】
扩散模型DDPM开源代码的剖析【对应公式与作者给的开源项目,diffusion model】
- 一、简介
- 二、扩散过程:输入是x_0和时刻num_steps,输出是x_t
- 三、逆扩散过程:输入x_t,不断采样最终输出x_0
- 四、具体参考算法流程图
- 五、模型model和损失函数(最重要!)
- 1、先看损失函数
- 2、model(看解释)
- 六、损失函数的推导
一、简介
论文地址:https://proceedings.neurips.cc/paper/2020/hash/4c5bcfec8584af0d967f1ab10179ca4b-Abstract.html
项目地址:https://github.com/hojonathanho/diffusion
公式推导参考这篇博客:https://blog.csdn.net/qq_45934285/article/details/129107994?spm=1001.2014.3001.5502
本文主要对扩散模型的关键公式给出原代码帮助理解和学习。有pytorch和TensorFlow版。
原作者给的代码不太好理解,给出了pytorch的好理解一些。
二、扩散过程:输入是x_0和时刻num_steps,输出是x_t
首先值得注意的是:x_0是一个二维数组,例如这里给的是一个10000行2列的数组,即每一行代表一个点。
这里取了s_curve的x轴和z轴的坐标,用点表示看起来就像一个s型
s_curve,_ = make_s_curve(10**4,noise=0.1)
s_curve = s_curve[:,[0,2]]/10.0
dataset = torch.Tensor(s_curve).float()

扩散过程其实就是一个不断加噪的过程,其不含参。可以给出最终公式。
xt=α‾tx0x_t=\sqrt {\overline{\alpha}_ {t}}x_ {0}xt=αtx0 + 1−α‾t\sqrt {1-\overline {\alpha} }_ {t}1−αt z‾t\overline {z}_tzt
在t不断变大的时候βt\beta_tβt越来越大,αt=1−βt\alpha_t=1-\beta_tαt=1−βt越来越小。即t增大的时候上面公式的前一项系数越来越小,后一项系数越来越大不断接近一个z‾t\overline {z}_tzt的高斯分布。
代码来自diffusion_tf/diffusion_utils_2.py
def q_sample(self, x_start, t, noise=None):"""Diffuse the data (t == 0 means diffused for 1 step)"""if noise is None:noise = tf.random_normal(shape=x_start.shape)assert noise.shape == x_start.shapereturn (self._extract(self.sqrt_alphas_cumprod, t, x_start.shape) * x_start +self._extract(self.sqrt_one_minus_alphas_cumprod, t, x_start.shape) * noise)
pytorch:
#计算任意时刻的x采样值,基于x_0和重参数化
def q_x(x_0,t):"""可以基于x[0]得到任意时刻t的x[t]"""noise = torch.randn_like(x_0)# 创建了一个与 x_0 张量具有相同形状的名为 noise 的张量,并且该张量的值是从标准正态分布中随机采样得到的。alphas_t = alphas_bar_sqrt[t]alphas_1_m_t = one_minus_alphas_bar_sqrt[t]return (alphas_t * x_0 + alphas_1_m_t * noise)#在x[0]的基础上添加噪声
可见对于求xtx_txt的公式最难理解的就是代码如何实现z‾t\overline {z}_tzt在代码中是创建了一个与 x_0 张量具有**相同形状**的名为 noise 的张量,并且该张量的值是从标准正态分布中随机采样得到的。这个noise其元素的值是从均值为0、标准差为1的正态分布中随机采样得到的。这个张量可以被用于实现噪声注入,数据增强等操作,也可以被用于一些随机化的算法中。
值得一提的是原项目中用num_diffusion_timesteps=1000来表示t,假如num_steps=100,那么很多需要用到的参数都可以提前算出来。
三、逆扩散过程:输入x_t,不断采样最终输出x_0
最终公式是:
q(Xt−1∣XtX0)=N(Xt−1;1αt(Xt−βt(1−αˉt)Z),1−αˉt−11−αˉtβt),Z∼N(0,I)q\left(X_{t-1} \mid X_{t} X_{0}\right)=N\left(X_{t-1} ; \frac{1}{\sqrt{\alpha_t}} (X_{t}-\frac{\beta_{t}}{\sqrt{\left(1-\bar{\alpha}_{t}\right)}} Z), \frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_{t}} \beta_{t}\right), Z \sim N(0, I) q(Xt−1∣XtX0)=N(Xt−1;αt1(Xt−(1−αˉt)βtZ),1−αˉt1−αˉt−1βt),Z∼N(0,I)
在论文中方差设置为一个常数βt\beta _tβt或β~t\tilde{\beta }_tβ~t其中:
β~t=1−αˉt−11−αˉtβt\tilde{\beta }_t=\frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_{t}} \beta_{t} β~t=1−αˉt1−αˉt−1βt
因此可训练的参数只存在与其均值之中。

就是这个公式,方差变为βt\beta_tβt,其中ϵθ\epsilon_\thetaϵθ是模型model
def p_sample(model,x,t,betas,one_minus_alphas_bar_sqrt):"""从x[T]采样t时刻的重构值"""t = torch.tensor([t])coeff = betas[t] / one_minus_alphas_bar_sqrt[t]eps_theta = model(x,t)mean = (1/(1-betas[t]).sqrt())*(x-(coeff*eps_theta))z = torch.randn_like(x)sigma_t = betas[t].sqrt()sample = mean + sigma_t * zreturn (sample)
代码来自diffusion_tf/diffusion_utils_2.py
def p_sample(self, denoise_fn, *, x, t, noise_fn, clip_denoised=True, return_pred_xstart: bool):"""Sample from the model"""model_mean, _, model_log_variance, pred_xstart = self.p_mean_variance(denoise_fn, x=x, t=t, clip_denoised=clip_denoised, return_pred_xstart=True)noise = noise_fn(shape=x.shape, dtype=x.dtype)assert noise.shape == x.shape# no noise when t == 0nonzero_mask = tf.reshape(1 - tf.cast(tf.equal(t, 0), tf.float32), [x.shape[0]] + [1] * (len(x.shape) - 1))sample = model_mean + nonzero_mask * tf.exp(0.5 * model_log_variance) * noiseassert sample.shape == pred_xstart.shapereturn (sample, pred_xstart) if return_pred_xstart else sample
循环恢复。
可见初始的x_t完全是一个随机噪声。torch.randn(shape)
cur_x可以看做是一个当前的采样,是一个二维数组,就是上面说的10000行2列。
然后x_seq可以看做是一个三维数组,即元素为cur_x的一个数组。
i是时刻,从n_steps的反向开始。
def p_sample_loop(model,shape,n_steps,betas,one_minus_alphas_bar_sqrt):"""从x[T]恢复x[T-1]、x[T-2]|...x[0]"""cur_x = torch.randn(shape)x_seq = [cur_x]for i in reversed(range(n_steps)):cur_x = p_sample(model,cur_x,i,betas,one_minus_alphas_bar_sqrt)x_seq.append(cur_x)return x_seq
代码来自diffusion_tf/diffusion_utils_2.py
def p_sample_loop(self, denoise_fn, *, shape, noise_fn=tf.random_normal):"""Generate samples"""assert isinstance(shape, (tuple, list))i_0 = tf.constant(self.num_timesteps - 1, dtype=tf.int32)img_0 = noise_fn(shape=shape, dtype=tf.float32)_, img_final = tf.while_loop(cond=lambda i_, _: tf.greater_equal(i_, 0),body=lambda i_, img_: [i_ - 1,self.p_sample(denoise_fn=denoise_fn, x=img_, t=tf.fill([shape[0]], i_), noise_fn=noise_fn, return_pred_xstart=False)],loop_vars=[i_0, img_0],shape_invariants=[i_0.shape, img_0.shape],back_prop=False)assert img_final.shape == shapereturn img_final
那么最终得到的x_seq就是最终从噪声恢复出的x_T到x_0序列。
恢复图像过程中利用了:
- βt\beta_tβt数组,其可以引申出很多参数(带α\alphaα的)
- num_steps即时刻。
- 一个model
参数只有model,那么我们来看model到底是什么。
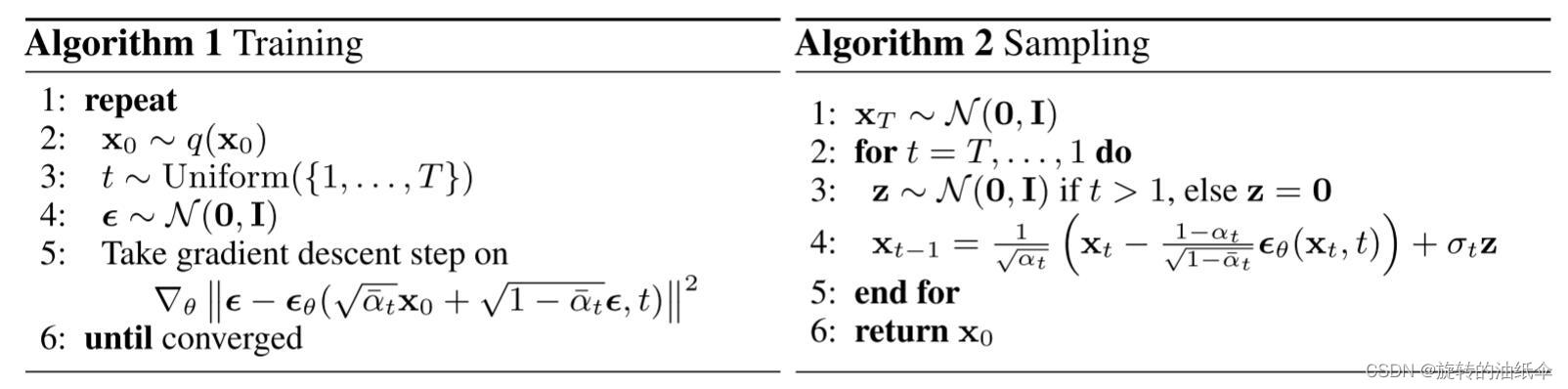
四、具体参考算法流程图
五、模型model和损失函数(最重要!)
1、先看损失函数

其中x_0就是一个batch的数据,batch_size取x_0的行数,就是batch_size
值得注意的是这里t是一个列向量,那么a也是一个列向量,其与x_0相乘的时候用了,广播机制(第二列完全复制第一列)然后与x_0对应位置上的元素相乘。
def diffusion_loss_fn(model,x_0,alphas_bar_sqrt,one_minus_alphas_bar_sqrt,n_steps):"""对任意时刻t进行采样计算loss"""batch_size = x_0.shape[0] #对一个batchsize样本生成随机的时刻t 覆盖到更多不同的tt = torch.randint(0,n_steps,size=(batch_size//2,))t = torch.cat([t,n_steps-1-t],dim=0)# [batchsize]行向量t = t.unsqueeze(-1)#压缩最后的时刻1[batchsize,1]列向量 #x0的系数a = alphas_bar_sqrt[t] #eps的系数aml = one_minus_alphas_bar_sqrt[t] #生成随机噪音epse = torch.randn_like(x_0) #构造模型的输入x = x_0*a+e*aml #送入模型,得到t时刻的随机噪声预测值output = model(x,t.squeeze(-1)) #这里t又变为一维向量[batchsize] #与真实噪声一起计算误差,求平均值return (e - output).square().mean()
其调用过程见:
重要的:batch_x是dataset的一个batch_size行的数据。例如dataset是10000行,batch_size=128那么batch_x是dataset的128行。需要注意的是,如果 dataset 的大小不能被 batch_size 整除,那么最后一个批次的大小可能会小于 batch_size。即一个epoch的batch数量为dataset.size()/batch_size向上取整。
dataloader = torch.utils.data.DataLoader(dataset,batch_size=batch_size,shuffle=True)
for idx,batch_x in enumerate(dataloader):loss = diffusion_loss_fn(model,batch_x,alphas_bar_sqrt,one_minus_alphas_bar_sqrt,num_steps)
dataloader这行代码是使用 PyTorch 中的 DataLoader 函数来创建一个数据加载器对象。这个对象可以用来迭代访问输入数据,以便将其输入到神经网络中进行训练或评估。
dataset:一个包含输入数据和对应标签的数据集对象。这个对象需要实现 getitem 和 len 方法,以便能够通过索引或长度访问数据集中的数据。
batch_size:一个整数值,表示每个批次的数据量。
shuffle:一个布尔值,表示是否需要在每个 epoch 开始前随机打乱数据集中的数据。
这个函数返回的是一个数据加载器对象,可以通过迭代器的方式来访问其中的数据。例如,可以使用 for 循环来遍历整个数据集,每次迭代会返回一个批次的数据和对应的标签。这样就可以方便地将数据输入到神经网络中进行训练或评估。
for idx,batch_x in enumerate(dataloader):
这行代码是使用 enumerate 函数和 DataLoader 对象来遍历整个数据集,并按照 batch_size 的大小分成若干批次进行迭代。
具体来说,enumerate 函数用于同时返回迭代对象中的元素以及它们的索引。在这里,dataloader 对象就是要被迭代的对象,而 idx 变量则表示当前迭代的批次索引。batch_x 变量则是当前批次中的输入数据,它是一个包含 batch_size 个样本的张量对象。
需要注意的是,在使用 enumerate 函数时,可以通过设置 start 参数来指定起始索引的值,默认为 0。例如,如果设置 start=1,那么第一个迭代的索引就是 1 而不是 0
2、model(看解释)
这里给出了一个比较简单的model,论文中使用的是Unet结构的模型。具体可以参考:https://nn.labml.ai/diffusion/ddpm/unet.html
具体训练过程可以参考:https://nn.labml.ai/diffusion/ddpm/experiment.html
import torch
import torch.nn as nnclass MLPDiffusion(nn.Module):def __init__(self,n_steps,num_units=128):super(MLPDiffusion,self).__init__()self.linears = nn.ModuleList([nn.Linear(2,num_units),nn.ReLU(),nn.Linear(num_units,num_units),nn.ReLU(),nn.Linear(num_units,num_units),nn.ReLU(),nn.Linear(num_units,2),])self.step_embeddings = nn.ModuleList([nn.Embedding(n_steps,num_units),nn.Embedding(n_steps,num_units),nn.Embedding(n_steps,num_units),])
# 第6步的modeldef forward(self,x,t):
# x = x_0for idx,embedding_layer in enumerate(self.step_embeddings):t_embedding = embedding_layer(t)x = self.linears[2*idx](x)x += t_embeddingx = self.linears[2*idx+1](x)x = self.linears[-1](x)return x
首先:
batch_size = 128
dataloader = torch.utils.data.DataLoader(dataset,batch_size=batch_size,shuffle=True)
num_epoch = 4000 # 4000个散点图
plt.rc('text',color='blue')
model = MLPDiffusion(num_steps)#输出维度是2,输入是x和step
optimizer = torch.optim.Adam(model.parameters(),lr=1e-3)
然后:训练这个model
for t in range(num_epoch):for idx,batch_x in enumerate(dataloader):loss = diffusion_loss_fn(model,batch_x,alphas_bar_sqrt,one_minus_alphas_bar_sqrt,num_steps)optimizer.zero_grad()loss.backward()torch.nn.utils.clip_grad_norm_(model.parameters(),1.)optimizer.step()
该模型的参数包括多个线性层和Embedding层的权重和偏置,在代码中用nn.ModuleList保存。在优化器更新时,通过model.parameters()方法获取所有可更新的参数,包括线性层和Embedding层的权重和偏置。因此,优化器更新的参数就是这些权重和偏置。
全连接层可以对输入数据进行线性变换,并输出与变换后数据维度相同的结果。例如,对于输入向量 xxx,全连接层可以通过将其与权重矩阵 WWW 相乘,加上偏置向量 bbb,并应用某种非线性激活函数 σ\sigmaσ,来计算输出向量 yyy:
y=σ(Wx+b)y = \sigma(Wx + b)y=σ(Wx+b)
更新的是这个W和b
Embedding 的参数也是模型中需要被训练的权重矩阵,它的维度是 (vocab_size, embedding_dim),其中 vocab_size 是词汇表大小,embedding_dim 是词嵌入的维度。Embedding 的参数在训练过程中被不断地更新,以最小化模型在训练集上的损失函数。每个词都被编码成一个 embedding_dim 维的向量,这些向量将作为输入传递到后续的网络层中。Embedding 层通过学习将每个词映射到一个低维空间中的向量表示,从而使得相似的词在这个向量空间中也更加接近,提高了模型的泛化能力。
更新的是(vocab_size, embedding_dim)
optimizer.zero_grad()的作用是将模型参数的梯度清零。在每次反向传播计算梯度之前,需要先清除之前的梯度,否则之前计算的梯度会累加到当前计算中,导致梯度计算出错。因此,在每次训练之前,需要调用zero_grad()来清除梯度。
loss.backward()是PyTorch中用于计算梯度的函数。在神经网络训练中,首先需要将输入数据通过前向传递计算出预测值,然后根据预测值和真实标签计算出损失函数值。接下来,需要计算损失函数对于模型参数的梯度,以便使用优化算法对参数进行更新。==loss.backward()函数的作用就是计算损失函数对于所有需要梯度的参数的导数。==在调用该函数之前,需要将所有需要梯度计算的参数设置requires_grad=True。该函数计算得到的梯度会保存在参数的.grad属性中。通常,计算完梯度后需要对其进行裁剪,以避免梯度爆炸问题,然后使用优化器对模型参数进行更新。
torch.nn.utils.clip_grad_norm_()是PyTorch中用于梯度裁剪的函数。梯度裁剪是一种防止梯度爆炸的技术,它限制了梯度的最大范数,从而避免梯度值过大。函数的第一个参数是一个可迭代对象,通常是模型的参数列表,第二个参数是梯度的最大范数。在该代码中,model.parameters()返回模型的参数列表,1.指定了梯度的最大范数为1。因此,该函数的作用是将模型参数的梯度限制在最大范数为1的范围内。梯度裁剪通常在计算梯度后和参数更新之前进行,以保证梯度不会过大。
optimizer.step()是PyTorch中用于更新模型参数的函数。在每次梯度计算之后,需要使用优化器来更新模型的参数。优化器根据梯度和学习率等参数来计算参数更新的值,并将计算得到的值应用到模型参数中。调用optimizer.step()函数可以实现该操作。该函数会更新优化器内部的参数状态,以便下一次迭代使用。
在Python中,super() 函数是用来调用父类(超类)的一个方法。在面向对象编程中,通常使用 super() 函数来初始化父类的构造方法。在这里,super(MLPDiffusion,self).init() 调用了父类 nn.Module 的构造函数,相当于显式调用 nn.Module 的构造函数,初始化了当前类 MLPDiffusion 的基类 nn.Module。这样做是为了确保子类继承父类中的属性和方法,并且能够正确地使用它们。
for idx,embedding_layer in enumerate(self.step_embeddings):
这行代码是在遍历self.step_embeddings列表中的每个embedding层,同时记录下每个embedding层在列表中的索引idx。
在MLPDiffusion模型的forward函数中,self.step_embeddings是一个由三个Embedding层组成的ModuleList,每个Embedding层的作用是将当前时间步t转化为一个num_units维的向量。在模型的forward函数中,需要遍历这三个Embedding层,并将其输出的向量与模型的输入x相加。这样做的目的是为了将当前时间步t的信息融入到模型的计算中。因此,遍历每个Embedding层,并将其输出的向量与模型的输入x相加,是非常必要的。
x = self.linears[2*idx](x)
这行代码的作用是对模型的输入x进行线性变换,即将x通过一个全连接层(线性层)进行变换。其中,2idx表示要使用==第idx个Embedding层的输出,==而self.linears[2idx]则表示要使用与之对应的全连接层。
需要注意的是,由于self.linears是一个由多个层组成的ModuleList,而不是一个单独的层,因此需要通过下标来获取其中的某个层。2*idx表示要使用第idx个Embedding层的输出,因为每个Embedding层输出的维度都是num_units,所以输入到全连接层的维度也是num_units。这里采用的激活函数是ReLU。
第idx个Embedding层的输出是一个维度为(batch_size,num_units)的张量,表示对输入的时间步t进行了嵌入(embedding)后的结果。其中,batch_size表示输入数据的批次大小,num_units是预定义的嵌入向量的维度,这里为128。Embedding层将整数编码转换为密集向量,这些密集向量在整个模型的训练过程中逐渐学习得到,类似于单词的词向量。在本模型中,使用三个Embedding层分别嵌入了当前时间步t,前一时间步t-1和后一时间步t+1,这些嵌入向量会在全连接层中与输入向量x进行加权求和,以产生输出。
x = self.linears[-1](x)
这行代码对应的是在模型的最后一层加上一个全连接层,输出维度为2。该全连接层对前面所有层的输出进行线性变换,并输出一个维度为2的向量作为最终的预测值。
ReLU它是一个激活函数,用于在神经网络的前向传播过程中对输入进行非线性变换。ReLU函数的形式为f(x)=max(0,x)f(x) = \max(0, x)f(x)=max(0,x),可以将输入的负值部分清零,保留正值部分。在反向传播中,ReLU层的导数可以被有效地计算,因此可以通过反向传播算法对模型的其他参数进行更新。
六、损失函数的推导
我们根据负对数似然优化 ELBO(来自简森不等式)。
E[−logpθ(x0)]≤Eq[−logpθ(x0:T)q(x1:T∣x0)]=L\mathbb{E}[-\log \textcolor{lightgreen}{p_\theta}(x_0)] \le \mathbb{E}_q [ -\log \frac{\textcolor{lightgreen}{p_\theta}(x_{0:T})}{q(x_{1:T}|x_0)} ] \\ =L E[−logpθ(x0)]≤Eq[−logq(x1:T∣x0)pθ(x0:T)]=L
损失可以改写如下。
L=Eq[−logpθ(x0:T)q(x1:T∣x0)]=Eq[−logp(xT)−∑t=1Tlogpθ(xt−1∣xt)q(xt∣xt−1)]=Eq[−logp(xT)q(xT∣x0)−∑t=2Tlogpθ(xt−1∣xt)q(xt−1∣xt,x0)−logpθ(x0∣x1)]=Eq[DKL(q(xT∣x0)∥p(xT))+∑t=2TDKL(q(xt−1∣xt,x0)∥pθ(xt−1∣xt))−logpθ(x0∣x1)]L = \mathbb{E}_q [ -\log \frac{\textcolor{lightgreen}{p_\theta}(x_{0:T})}{q(x_{1:T}|x_0)} ] \\ = \mathbb{E}_q [ -\log p(x_T) - \sum_{t=1}^T \log \frac{\textcolor{lightgreen}{p_\theta}(x_{t-1}|x_t)}{q(x_t|x_{t-1})} ] \\ = \mathbb{E}_q [ -\log \frac{p(x_T)}{q(x_T|x_0)} -\sum_{t=2}^T \log \frac{\textcolor{lightgreen}{p_\theta}(x_{t-1}|x_t)}{q(x_{t-1}|x_t,x_0)} -\log \textcolor{lightgreen}{p_\theta}(x_0|x_1)] \\ = \mathbb{E}_q [ D_{KL}(q(x_T|x_0) \Vert p(x_T)) +\sum_{t=2}^T D_{KL}(q(x_{t-1}|x_t,x_0) \Vert \textcolor{lightgreen}{p_\theta}(x_{t-1}|x_t)) -\log \textcolor{lightgreen}{p_\theta}(x_0|x_1)] L=Eq[−logq(x1:T∣x0)pθ(x0:T)]=Eq[−logp(xT)−t=1∑Tlogq(xt∣xt−1)pθ(xt−1∣xt)]=Eq[−logq(xT∣x0)p(xT)−t=2∑Tlogq(xt−1∣xt,x0)pθ(xt−1∣xt)−logpθ(x0∣x1)]=Eq[DKL(q(xT∣x0)∥p(xT))+t=2∑TDKL(q(xt−1∣xt,x0)∥pθ(xt−1∣xt))−logpθ(x0∣x1)]
DKL(q(xT∣x0)∥p(xT))D_{KL}(q(x_T|x_0) \Vert p(x_T))DKL(q(xT∣x0)∥p(xT)) 是常数,因为我们保持 β1,…,βT\beta_1, \dots, \beta_Tβ1,…,βT 不变。
计算 Lt−1=DKL(q(xt−1∣xt,x0)∥pθ(xt−1∣xt))L_{t-1} = D_{KL}(q(x_{t-1}|x_t,x_0) \Vert \textcolor{lightgreen} {p_\theta}(x_{t-1}| x_t))Lt−1=DKL(q(xt−1∣xt,x0)∥pθ(xt−1∣xt))
以 x0x_0x0 为条件的前向过程后验是,
q(xt−1∣xt,x0)=N(xt−1;μ~t(xt,x0),β~tI)μ~t(xt,x0)=αˉt−1βt1−αˉtx0+αt(1−αˉt−1)1−αˉtxtβ~t=1−αˉt−11−αˉtβtq(x_{t-1}|x_t, x_0) = \mathcal{N} \Big(x_{t-1}; \tilde\mu_t(x_t, x_0), \tilde\beta_t \mathbf{I} \Big) \\ \tilde\mu_t(x_t, x_0) = \frac{\sqrt{\bar\alpha_{t-1}}\beta_t}{1 - \bar\alpha_t}x_0 + \frac{\sqrt{\alpha_t}(1 - \bar\alpha_{t-1})}{1-\bar\alpha_t}x_t \\ \tilde\beta_t = \frac{1 - \bar\alpha_{t-1}}{1 - \bar\alpha_t} \beta_t q(xt−1∣xt,x0)=N(xt−1;μ~t(xt,x0),β~tI)μ~t(xt,x0)=1−αˉtαˉt−1βtx0+1−αˉtαt(1−αˉt−1)xtβ~t=1−αˉt1−αˉt−1βt
该论文设置 Σθ(xt,t)=σt2I\textcolor{lightgreen}{\Sigma_\theta}(x_t, t) = \sigma_t^2 \mathbf{I}Σθ(xt,t)=σt2I 其中 σt2\sigma_t^2σt2 设置为常量 βt\beta_tβt 或 β~t\tilde\beta_tβ~t。
然后,
pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),σt2I)\textcolor{lightgreen}{p_\theta}(x_{t-1} | x_t) = \mathcal{N}\big(x_{t-1}; \textcolor{lightgreen}{\mu_\theta}(x_t, t), \sigma_t^2 \mathbf{I} \big)pθ(xt−1∣xt)=N(xt−1;μθ(xt,t),σt2I)
对于给定噪声 ϵ∼N(0,I)\epsilon\sim\mathcal{N}(\mathbf{0}, \mathbf{I})ϵ∼N(0,I) 使用 q(xt∣x0)q(x_t|x_0)q(xt∣x0)
xt(x0,ϵ)=αˉtx0+1−αˉtϵx0=1αˉt(xt(x0,ϵ)−1−αˉtϵ)x_t(x_0, \epsilon) = \sqrt{\bar\alpha_t} x_0 + \sqrt{1-\bar\alpha_t}\epsilon \\ x_0 = \frac{1}{\sqrt{\bar\alpha_t}} \Big(x_t(x_0, \epsilon) - \sqrt{1-\bar\alpha_t}\epsilon\Big) xt(x0,ϵ)=αˉtx0+1−αˉtϵx0=αˉt1(xt(x0,ϵ)−1−αˉtϵ)
这给出了:
Lt−1=DKL(q(xt−1∣xt,x0)∥pθ(xt−1∣xt))=Eq[12σt2∥μ~(xt,x0)−μθ(xt,t)∥2]=Ex0,ϵ[12σt2∥1αt(xt(x0,ϵ)−βt1−αˉtϵ)−μθ(xt(x0,ϵ),t)∥2]L_{t-1} = D_{KL}(q(x_{t-1}|x_t,x_0) \Vert \textcolor{lightgreen}{p_\theta}(x_{t-1}|x_t)) \\ = \mathbb{E}_q \Bigg[ \frac{1}{2\sigma_t^2} \Big \Vert \tilde\mu(x_t, x_0) - \textcolor{lightgreen}{\mu_\theta}(x_t, t) \Big \Vert^2 \Bigg] \\ = \mathbb{E}_{x_0, \epsilon} \Bigg[ \frac{1}{2\sigma_t^2} \bigg\Vert \frac{1}{\sqrt{\alpha_t}} \Big( x_t(x_0, \epsilon) - \frac{\beta_t}{\sqrt{1 - \bar\alpha_t}} \epsilon \Big) - \textcolor{lightgreen}{\mu_\theta}(x_t(x_0, \epsilon), t) \bigg\Vert^2 \Bigg] \\ Lt−1=DKL(q(xt−1∣xt,x0)∥pθ(xt−1∣xt))=Eq[2σt21μ~(xt,x0)−μθ(xt,t)2]=Ex0,ϵ[2σt21αt1(xt(x0,ϵ)−1−αˉtβtϵ)−μθ(xt(x0,ϵ),t)2]
使用模型重新参数化以预测噪声
μθ(xt,t)=μ~(xt,1αˉt(xt−1−αˉtϵθ(xt,t)))=1αt(xt−βt1−αˉtϵθ(xt,t))\textcolor{lightgreen}{\mu_\theta}(x_t, t) = \tilde\mu \bigg(x_t, \frac{1}{\sqrt{\bar\alpha_t}} \Big(x_t - \sqrt{1-\bar\alpha_t}\textcolor{lightgreen}{\epsilon_\theta}(x_t, t) \Big) \bigg) \\ = \frac{1}{\sqrt{\alpha_t}} \Big(x_t - \frac{\beta_t}{\sqrt{1-\bar\alpha_t}}\textcolor{lightgreen}{\epsilon_\theta}(x_t, t) \Big) μθ(xt,t)=μ~(xt,αˉt1(xt−1−αˉtϵθ(xt,t)))=αt1(xt−1−αˉtβtϵθ(xt,t))
其中 ϵθ\epsilon_\thetaϵθ 是一个学习函数,它在给定 (xt,t)(x_t, t)(xt,t) 的情况下预测 ϵ\epsilonϵ。
这给出了:
Lt−1=Ex0,ϵ[βt22σt2αt(1−αˉt)∥ϵ−ϵθ(αˉtx0+1−αˉtϵ,t)∥2]L_{t-1} = \mathbb{E}_{x_0, \epsilon} \Bigg[ \frac{\beta_t^2}{2\sigma_t^2 \alpha_t (1 - \bar\alpha_t)} \Big\Vert \epsilon - \textcolor{lightgreen}{\epsilon_\theta}(\sqrt{\bar\alpha_t} x_0 + \sqrt{1-\bar\alpha_t}\epsilon, t) \Big\Vert^2 \Bigg] Lt−1=Ex0,ϵ[2σt2αt(1−αˉt)βt2ϵ−ϵθ(αˉtx0+1−αˉtϵ,t)2]
也就是说,我们正在训练预测噪声。
Simplified loss
Lsimple(θ)=Et,x0,ϵ[∥ϵ−ϵθ(αˉtx0+1−αˉtϵ,t)∥2]L_{\text{simple}}(\theta) = \mathbb{E}_{t,x_0, \epsilon} \Bigg[ \bigg\Vert \epsilon - \textcolor{lightgreen}{\epsilon_\theta}(\sqrt{\bar\alpha_t} x_0 + \sqrt{1-\bar\alpha_t}\epsilon, t) \bigg\Vert^2 \Bigg]Lsimple(θ)=Et,x0,ϵ[ϵ−ϵθ(αˉtx0+1−αˉtϵ,t)2]
这最小化 −logpθ(x0∣x1)-\log \textcolor{lightgreen}{p_\theta}(x_0|x_1)−logpθ(x0∣x1) when t=1t=1t=1 和 Lt−1L_{t-1}Lt−1 for t>1t\gt1t>1 丢弃 在 Lt−1L_{t-1}Lt−1 中加权。丢弃权重 βt22σt2αt(1−αˉt)\frac{\beta_t^2}{2\sigma_t^2 \alpha_t (1 - \bar\alpha_t)}2σt2αt(1−αˉt)βt2 增加赋予较高 ttt(具有较高噪声水平)的权重,从而提高样本质量。
如果觉得有帮助的话,记得点赞收藏支持一下哦。如果有问题请在评论区一起交流讨论。
Reference:
https://www.bilibili.com/video/BV1b541197HX/?spm_id_from=333.999.0.0
https://nn.labml.ai/diffusion/ddpm/index.html
相关文章:
扩散模型DDPM开源代码的剖析【对应公式与作者给的开源项目,diffusion model】
扩散模型DDPM开源代码的剖析【对应公式与作者给的开源项目,diffusion model】一、简介二、扩散过程:输入是x_0和时刻num_steps,输出是x_t三、逆扩散过程:输入x_t,不断采样最终输出x_0四、具体参考算法流程图五、模型mo…...

C语言 学生记录管理系统
学生记录管理系统 1--添加 2--删除 3--查询:按姓名 4--查询:按班级 5--查询:按学号 0--退出 请选择操作序号(0—5):1 请输入新学生的学号:1 请输入新学生的…...

【独家】华为OD机试 C 语言解题 - 交换字符
最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南)华为od机试,独家整理 已参加机试人员的实战技巧文章目录 最近更新的博客使用说明本期…...

网络安全平台测试赛 easyphp(phar脏数据处理)
昨天的比赛,14.00-17.00.时间有点紧张,比赛期间没拿下来这道 😭非常痛苦,很顺畅的思路 一步步想下来,卡在最后一步末尾脏数据处理了,最后时间到了 没打通,还需多练 这里本地复现一下࿱…...

【python】XML格式文件读写详解
注:最后有面试挑战,看看自己掌握了吗 文章目录XML介绍格式XML与AJAX与HTML区别联系生成XML文件案例用SAX模块处理XML用DOM模块处理XML🌸I could be bounded in a nutshell and count myself a king of infinite space. 特别鸣谢:…...

理解js的精度问题
参考博客:js精度丢失问题-看这篇文章就够了(通俗易懂)、探寻 JavaScript 精度问题以及解决方案、JavaScript 浮点数陷阱及解法 1 为什么 JavaScript 中所有数字包括整数和小数都只有一种类型 即 Number类型,它的实现遵循 IEEE 754 标准。 符号位S&#…...
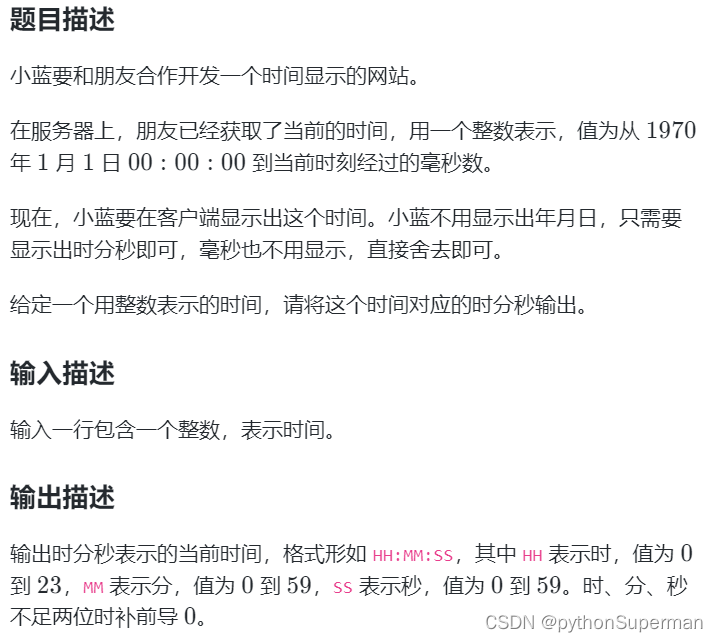
蓝桥杯 时间显示
题目 输入输出样例 示例 1 输入 46800999输出 13:00:00示例 2 输入 1618708103123输出 01:08:23评测用例规模与约定 对于所有评测用例,给定的时间为不超过 10^{18}1018 的正整数。 运行限制 最大运行时间:1s最大运行内存: 512M 基础知识 时间的转换…...

qt中设置菜单高度
如题所示,我建立一个菜单,代码如下,但是菜单项的高度太小了, { popupMenu new QMenu(this); QAction *action1 new QAction(tr(“&New1”), this); QAction *action2 new QAction(tr(“&New2”), this); QA…...
测开:前端基础-css页面布局-定位
一 、传统网页布局的三种方式 网页布局的本质–用CSS来摆放盒子,把盒子摆放到相应的位置,css提供了三种传统布局方式,分别是标准流,浮动和定位三种。 二、 定位 2.1 啥是定位 我的理解,就是要把这个元素,…...

Servlet中八个监听器介绍
一、监听对象创建的监听器 1、ServletContextListener /*** 用于监听ServletContext对象创建和销毁的监听器* since v 2.3*/public interface ServletContextListener extends EventListener {/*** 对象创建时执行此方法。该方法的参数是ServletContextEvent事件对象…...
LicenseBox Crack,对服务器的要求最低
LicenseBox Crack,对服务器的要求最低 LicenseBox是用于管理基于PHP的软件、WordPress插件或主题、主题、插件和WordPress的更新和许可的完整软件。它易于安装,对服务器的要求最低,用户友好的界面,无限脚本的使用为您的创造力打开了大门。 Li…...
css中重难点整理(vertical-align)
一、vertical-align 在学习vertical-align的时候,可能会很困惑。即使网上有一大推文章讲veitical-align,感觉看完好像懂了,等自己布局的时候用到vertical-align的时候好像对它又很陌生。这就是我在布局的时候遇到的问题。 本来vertical-align就很不好理…...
javaScript基础面试题 ---宏任务微任务
宏任务微任务一、为什么JS是单线程语言?二、JS是单线程,怎样执行异步代码?1、JS是单线程语言 2、JS代码执行流程,同步执行完,再进行事件循环(微任务、宏任务) 3、清空所有的微任务,再…...
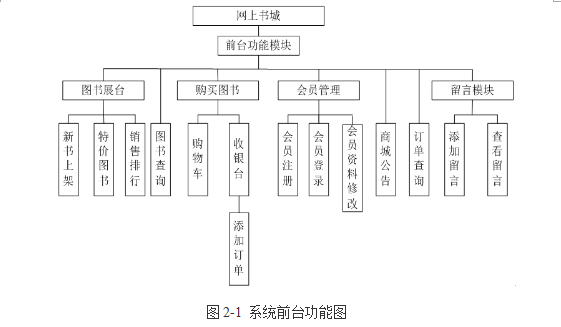
基于JSP的网上书城
技术:Java、JSP等摘要:随着科技的迅速发展,计算机技术已应用到社会的各个领域。随着计算机技术和通信技术的迅速发展,网络的规模也逐渐增大,网络的元素也随之不断增加,有的利用其通信,有的利用其…...

C#教程 05 常量
文章目录 C# 常量整数常量浮点常量字符常量字符串常量定义常量C# 常量 常量是固定值,程序执行期间不会改变。常量可以是任何基本数据类型,比如整数常量、浮点常量、字符常量或者字符串常量,还有枚举常量。 常量可以被当作常规的变量,只是它们的值在定义后不能被修改。 整数…...
)
【华为OD机试真题java、python】基站维修工程师【2022 Q4 100分】(100%通过)
代码请进行一定修改后使用,本代码保证100%通过率。本文章提供java、python两种代码 题目描述 小王是一名基站维护工程师,负责某区域的基站维护。 某地方有 n 个基站( 1<n<10 ),已知各基站之间的距离 s( 0<s<500 ), 并且基站 x 到基站 y 的距离,与基站 y …...

你是真的“C”——为冒泡排序升级赋能!
你是真的“C”——为冒泡排序升级赋能!😎前言🙌冒泡排序升级赋能之境界一!冒泡排序升级赋能之境界二!qsort库函数的运用和认识总结撒花💞😎博客昵称:博客小梦 😊最喜欢的…...
【JavaEE】基于mysql与servlet自制简易的表白墙程序
文章目录1 表白墙页面构建2 Servlet 回顾3 表白墙后端程序实现3.1 我们需要做什么?3.2 实现细节4 实现结果写在最后1 表白墙页面构建 该页面由标题、文本、三个 input 输入框与一个提交按钮构成,整体比较简单,相关样式文件和页面代码会在后面…...
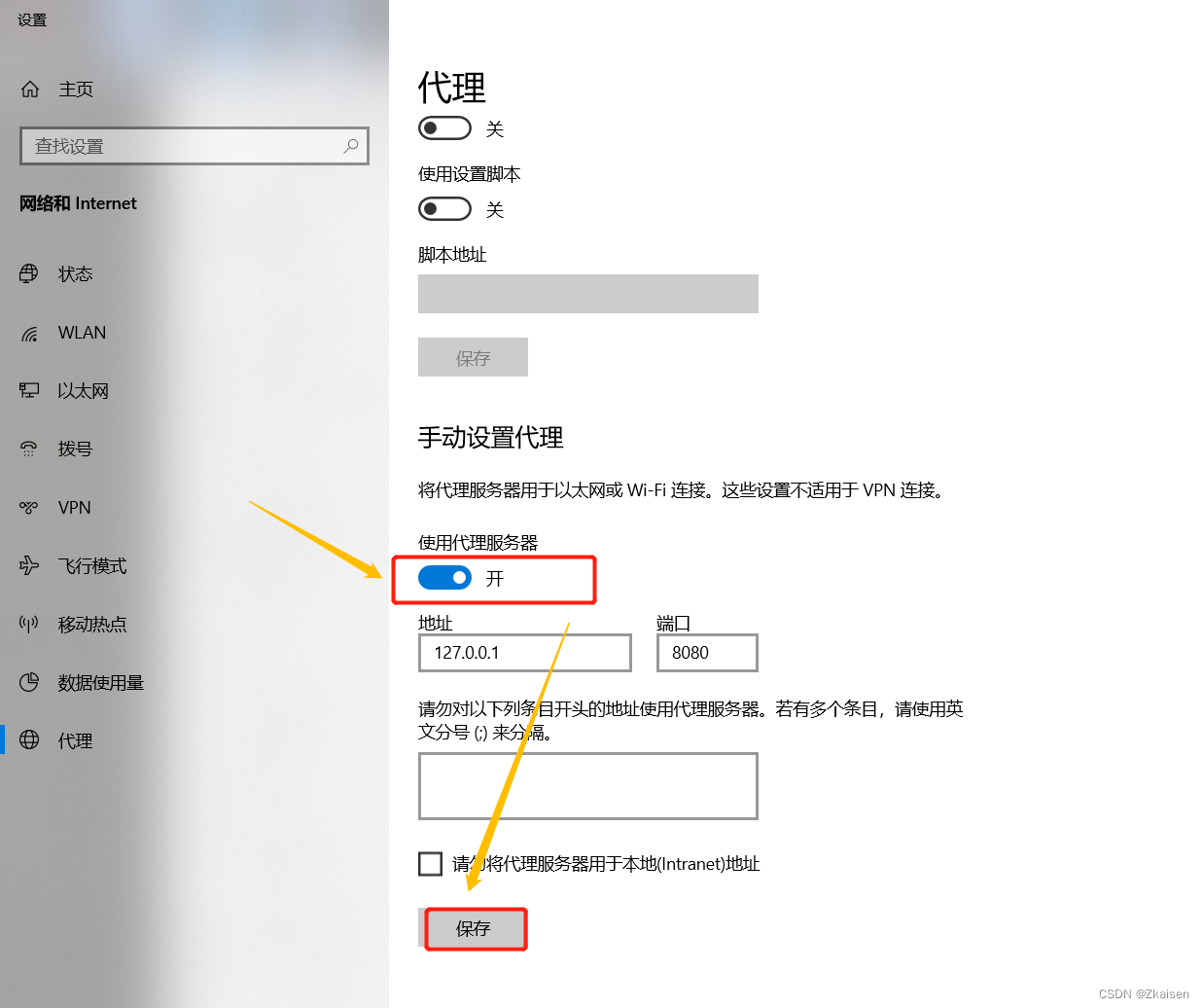
抓包技术(浏览器APP小程序PC应用)
P1 抓包工具 01. Fidder 首先第一个Fiddler它的优势,独立运行,第二个支持移动设备(是否能抓移动APP的包,)在这一块的话wireshark、httpwatch就不支持,因此在这一块就可以排除掉前连个,因为我们…...
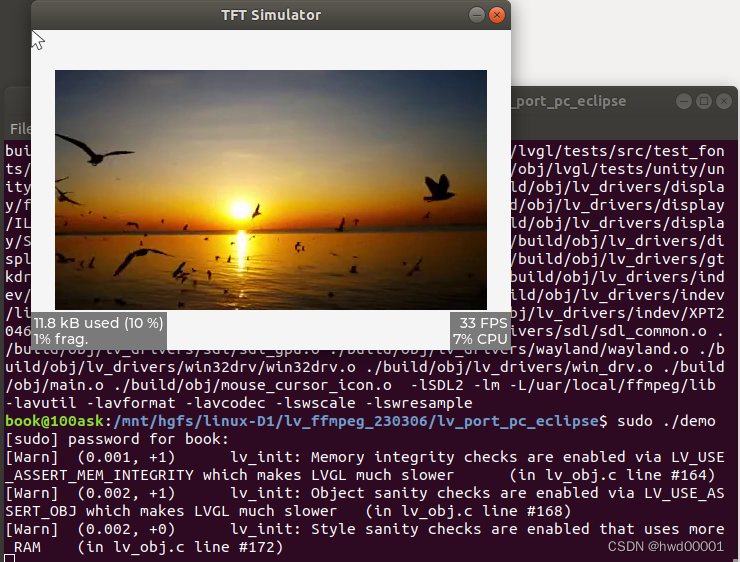
linux笔记(10):ubuntu环境下,基于SDL2运行lvgl+ffmpeg播放mp4
文章目录1.ubuntu安装ffmpeg1.1 源码安装1.1 克隆ffmpeg源码1.2 配置编译条件,编译,安装1.2 直接安装依赖包2.下载lvgl源码2.1 测试原始代码2.2 运行lv_example_ffmpeg_2()例程2.2.1 配置 LV_USE_FFMPEG 为 12.2.2 lv_example_ffmpeg_2()替换lv_demo_wid…...

Smithbox终极指南:如何轻松定制你的魂类游戏世界
Smithbox终极指南:如何轻松定制你的魂类游戏世界 【免费下载链接】Smithbox Smithbox is a modding tool for Elden Ring, Armored Core VI, Sekiro, Dark Souls 3, Dark Souls 2, Dark Souls, Bloodborne and Demons Souls. 项目地址: https://gitcode.com/gh_mi…...

硬件工程师的‘第一板’:从最小系统设计到PCB Layout的STM32实战指南
STM32最小系统设计实战:从原理到PCB的工程化思维 作为一名硬件工程师,第一次独立完成PCB设计时的忐忑至今记忆犹新。那块承载着STM32最小系统的绿色电路板,不仅是我职业生涯的"第一板",更是一次从理论到实践的完整跨越。…...
在SI仿真中的正确建模姿势)
从“白点”到模型:用通俗语言拆解玻纤布(如1078)在SI仿真中的正确建模姿势
从“白点”到模型:信号完整性仿真中的玻纤布建模实战指南 在高速PCB设计领域,信号完整性(SI)工程师常常需要面对一个看似微小却影响深远的问题:那些在显微镜下呈现为"白点"的玻璃纤维束,究竟应该…...

Midscene.js技术架构深度解析:构建企业级视觉驱动自动化测试平台的技术挑战与解决方案
Midscene.js技术架构深度解析:构建企业级视觉驱动自动化测试平台的技术挑战与解决方案 【免费下载链接】midscene AI-powered, vision-driven UI automation for every platform. 项目地址: https://gitcode.com/GitHub_Trending/mid/midscene 在当今多平台、…...

【M1 Mac实战】MATLAB R2021b 安装与优化全攻略
1. M1 Mac安装MATLAB R2021b前的准备工作 第一次在M1芯片的Mac上安装MATLAB R2021b时,我遇到了不少坑。这里分享下必须做好的几项准备工作,能帮你节省至少2小时的折腾时间。 首先确认你的系统版本。实测在macOS Monterey(12.0)到V…...

实测Taotoken多模型路由的稳定性与延迟体感观察
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 实测Taotoken多模型路由的稳定性与延迟体感观察 本文基于一段时间的实际调用体验,分享对Taotoken平台稳定性和延迟的直…...

别再用docker tag了!深入理解Containerd生态:crictl、ctr与nerdctl到底该怎么选?
深入解析Containerd生态:crictl、ctr与nerdctl的镜像管理实战指南 在容器技术快速发展的今天,越来越多的开发者正从Docker生态转向Containerd这一更轻量、更符合Kubernetes标准的运行时环境。但当我们真正开始使用Containerd时,往往会遇到一个…...

SpeexDSP音频处理库深度解析:3种核心算法实现与40%性能优化实战
SpeexDSP音频处理库深度解析:3种核心算法实现与40%性能优化实战 【免费下载链接】speexdsp Speex audio processing library - THIS IS A MIRROR, DEVELOPMENT HAPPENS AT https://gitlab.xiph.org/xiph/speexdsp 项目地址: https://gitcode.com/gh_mirrors/sp/sp…...

Spring Boot安全脚手架:openclaw-security-starter核心架构与实战指南
1. 项目概述:一个面向开发者的安全脚手架最近在梳理团队内部的安全开发规范时,发现一个普遍痛点:每个新项目启动,安全相关的配置总是东拼西凑,从依赖扫描、密钥管理到API安全策略,都得重新来一遍࿰…...

开发者必备:从聊天记录到结构化知识库的自动化工具实践
1. 项目概述:一个面向开发者的轻量级对话记录工具最近在整理几个开源项目的技术讨论记录时,我又一次陷入了混乱。Slack、Discord、Telegram、微信……不同平台的聊天记录散落各处,格式五花八门,想回溯一个关键的技术决策或一个报错…...