结合大象机器人六轴协作机械臂myCobot 280 ,解决特定的自动化任务和挑战!(下)
Limo Pro 小车建图导航
引言
前景提要:我们在上文介绍了使用LIMO cobot 实现一个能够执行复杂任务的复合机器人系统的应用场景的项目,从以下三个方面:概念设计、系统架构以及关键组件。
本文主要深入项目内核的主要部分,同样也主要分为三个部分:机械臂的视觉抓取,LIMO Pro在ROS中的功能,建图导航避障等,以及两个系统的集成。
设备准备
- myCobot 280 M5stack
- myCobot Adaptive Gripper
- myCobot Camera Flange 2.0
- LIMO PRO
机械臂视觉抓取
这是机械臂安装 Adaptive Gripper,和 camera flange 2.0之后的样子。

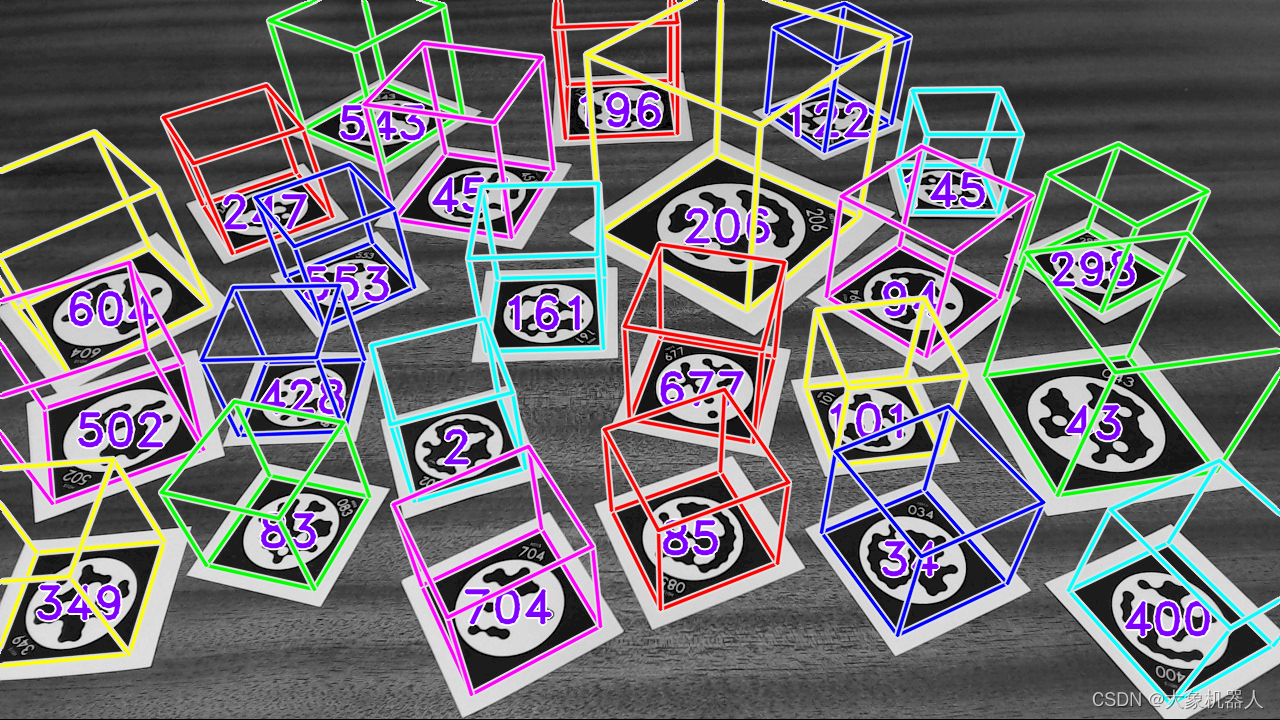
我们是用的camera flange 2.0是一款2D的相机,他并不能够依靠他相机本身来获取到一个物体的三维(长宽高),但我们可以使用标记物来获得到目标物体的都长宽高。常见的有ArUco,STag,AR码,AprilTags。今天我们用STag算法来做视觉识别。
STag标记系统
STag是一个为了高稳定性和精确的三位定位而设计的标记系统。它特别适用于环境中有遮挡和光照变化的情况。
下面有一个视频展示了STag标记码,ARToolKit+,ArUco,RUNE-Tag码在同一个环境下的识别效果。
https://www.youtube.com/watch?v=vnHI3GzLVrY
可以从视频中看出来STag对环境变化的强大适应性和在复杂场景下的高可靠性,使其成为在要求高精度跟踪和定位的应用中的首选。还有一篇论文专门讲解STag稳定的基准标记系统,感兴趣的可以自己点击链接去了解一下。
https://arxiv.org/abs/1707.06292
STag系统可以是适配与ROS,有ROS软件包,用的是c++编写的,也能够支持python进行使用。
C++/ROS:GitHub - bbenligiray/stag: STag: A Stable Fiducial Marker System
Python:GitHub - ManfredStoiber/stag-python: Python Package for STag - A Stable, Occlusion-Resistant Fiducial Marker System
用python 简单写一个例子
import cv2
import stag
import numpy as np# 加载相机参数
camera_params = np.load("camera_params.npz")
mtx, dist = camera_params["mtx"], camera_params["dist"]# 初始化STag检测器
stag_detector = stag.detectMarkers(mtx, dist)# 初始化视频捕获
cap = cv2.VideoCapture(0)
while cap.isOpened():ret, frame = cap.read()if not ret:break# 应用相机校正(可选)frame_undistorted = cv2.undistort(frame, mtx, dist, None, mtx)# 检测STag标记(corners, ids, rejected_corners) = stag.detectMarkers(frame_undistorted, 21)# 绘制检测到的标记及其IDstag.drawDetectedMarkers(frame_undistorted, corners, ids)# 绘制被拒绝的候选区域,颜色设为红色stag.drawDetectedMarkers(frame_undistorted, rejected_corners, border_color=(255, 0, 0))# 显示结果cv2.imshow("STag Detection", frame_undistorted)if cv2.waitKey(1) & 0xFF == ord('q'):breakcap.release()
cv2.destroyAllWindows()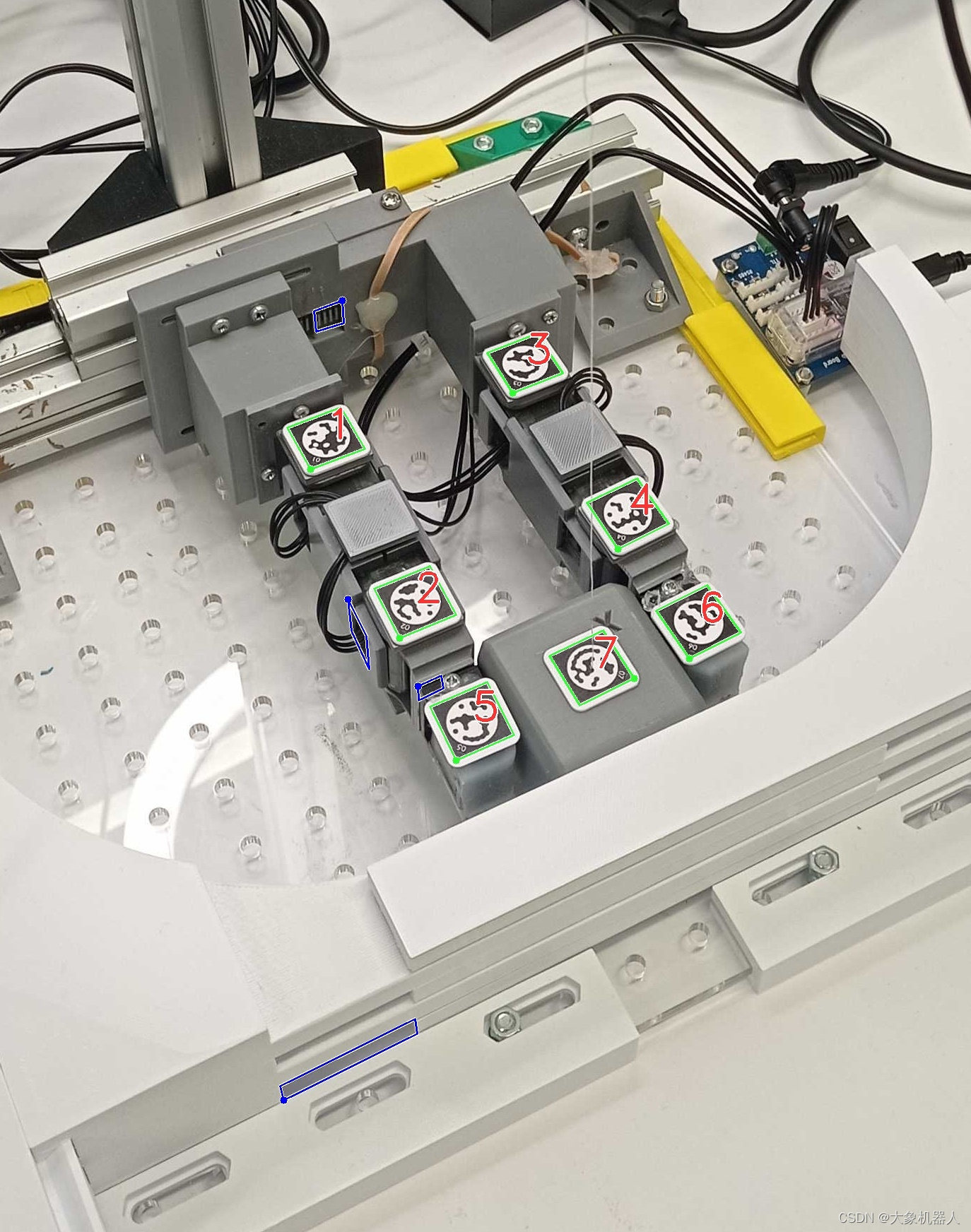
标记了STag码之后可以获得标记码四个角的参数,
(array([[[257., 368.],[185., 226.],[345., 162.],[420., 302.]]], dtype=float32),)给定坐标过后,可以用opencv的‘cv2.solvePnP'函数来计算标记相对于相机的旋转和偏移量。这个函数需要标记的3D坐标(在物理世界中的位置)和相应的2D图像坐标(即检测到的角点),以及相机的内参和畸变系数。solvePnP会返回旋转向量(rvec)和平移向量(tvec),它们描述了从标记坐标系到相机坐标系的转换。这样,就可以根据这些参数计算出标记的位置和朝向。
以下是伪代码方便理解
def estimate_pose(corners):#Do some calculations with PnP, camera rotation and offsetreturn rvec,tvecdef convert_pose_to_arm_coordinates(rvec, tvec):# 将旋转向量和平移向量转换为机械臂坐标系统中的x, y, z, rx, ry, rzreturn x, y, z, rx, ry, rzdef convert_grab(object_coord_list):#Do some calculations to convert the coordinates into grasping coordinates for the robotic armreturn grab_positioncap = cv2.VideoCapture(0)
while cap.isOpened():ret, frame = cap.read()if not ret:breakmaker = (corners, ids, rejected_corners) = stag.detectMarkers(image, 21)rvec, tvec = stag.estimate_pose(marker)object_coord_list = convert_pose_to_arm_coordinates(rvec, tvec)grab_position = convert_grab(object_coord_list)mycobot.move_to_position(grab_position)机械臂控制
以上的代码就是大概的抓取的流程,比较复杂的部分解决了,接下来我们处理机械臂的运动控制,用到的是pymycobot库
from pymycobot import MyCobot#Create an instance and link the robotic arm
mc = MyCobot('com3',115200)#Control the robotic arm with angle
mc.send_angles(angles_list,speed)#Control the robotic arm using coordinates
mc.send_coords(coords_list,speed,mode)#Control gripper,value-0~100
mc.set_gripper_value(value,speed)因为机械臂的开放接口比较多,我们只需要使用坐标控制,夹爪控制就好了。
Limo Pro 建图导航
完成了机械臂抓取部分的功能,接下来我们要实现小车的建图导航模块了。
首先我们要见图,有了地图之后才能够在地图上进行导航,定点巡航等一些的功能,目前有多种建图的算法,因为我们搭建的场景并不是很大,环境相对于静态我们选择使用gmapping算法来实现。
建图
Gmapping是基于滤波SLAM框架的常用开源SLAM算法。Gmapping有效利用了车轮里程计信息,对激光雷达的频率要求不高,在构建小场景地图时,所需的计算量较小且精度较高。这里通过使用ROS封装了的GMapping功能包来实现limo的建图。
注:以下的功能都是封装好的可以直接使用
首先需要启动雷达,打开一个新终端,在终端中输入命令:
roslaunch limo_bringup limo_start.launch pub_odom_tf:=false然后启动gmapping建图算法,打开另一个新终端,在终端中输入命令:
roslaunch limo_bringup limo_gmapping.launch成功启动之后会打开rviz可视化工具,这时候看到的界面如图
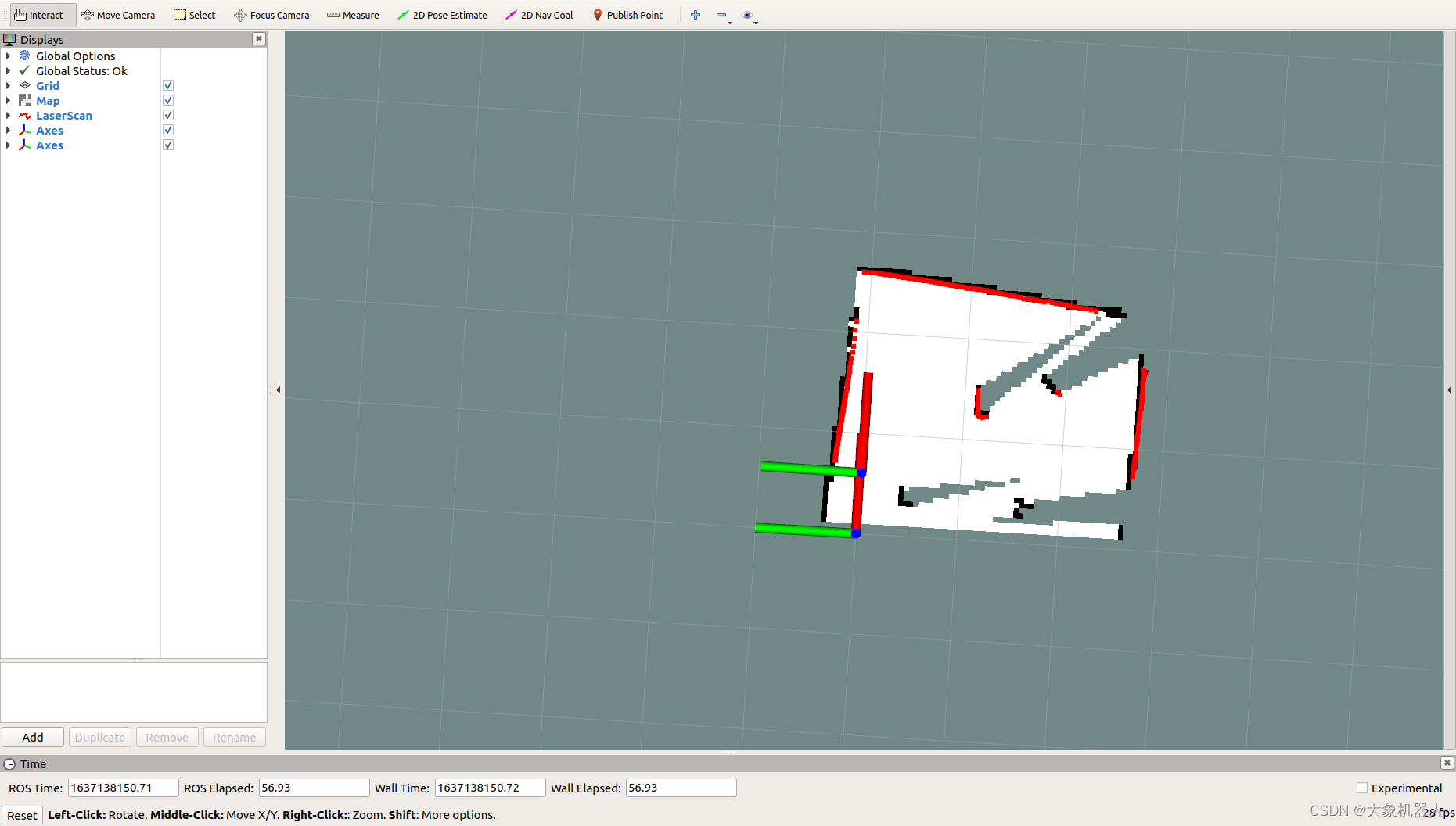
这时候就可以把手柄调为遥控模式,控制limo建图了。
构建完地图之后,需要运行以下命令,把地图保存到指定目录:
1、切换到需要保存地图的目录下,这里把地图保存到~/agilex_ws/src/limo_ros/limo_bringup/maps/,在终端中输入命令:
cd ~/agilex_ws/src/limo_ros/limo_bringup/maps/2、切换到/agilex_ws/limo_bringup/maps 之后,继续在终端中输入命令:
rosrun map_server map_saver -f map1map1为保存地图的名称,保存地图时应避免地图的名称重复
导航
前面我们用了gmapping来进行建图,我们现在来进行导航。导航的关键是机器人定位和路径规划两大部分。针对这两个核心,ROS提供了以下两个功能包。
(1)move_base:实现机器人导航中的最优路径规划。
(2)amcl:实现二维地图中的机器人定位。
在上述的两个功能包的基础上,ROS提供了一套完整的导航框架,
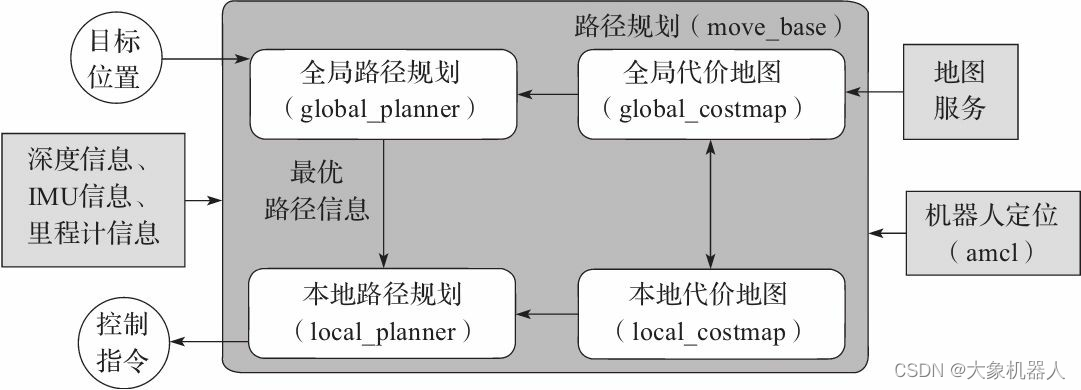
机器人只需要发布必要的传感器信息和导航的目标位置,ROS即可完成导航功能。在该框架中,move_base功能包提供导航的主要运行、交互接口。为了保障导航路径的准确性,机器人还要对自己所处的位置进行精确定位,这部分功能由amcl功能包实现。
在导航的过程中,运用了两种算法DWA和TEB算法,这两种算法分别处理全局路径和局部路径规划,来保证小车能够安全的前进到目的地,避免与障碍物发生碰撞。
(1)首先启动雷达,在终端中输入命令:
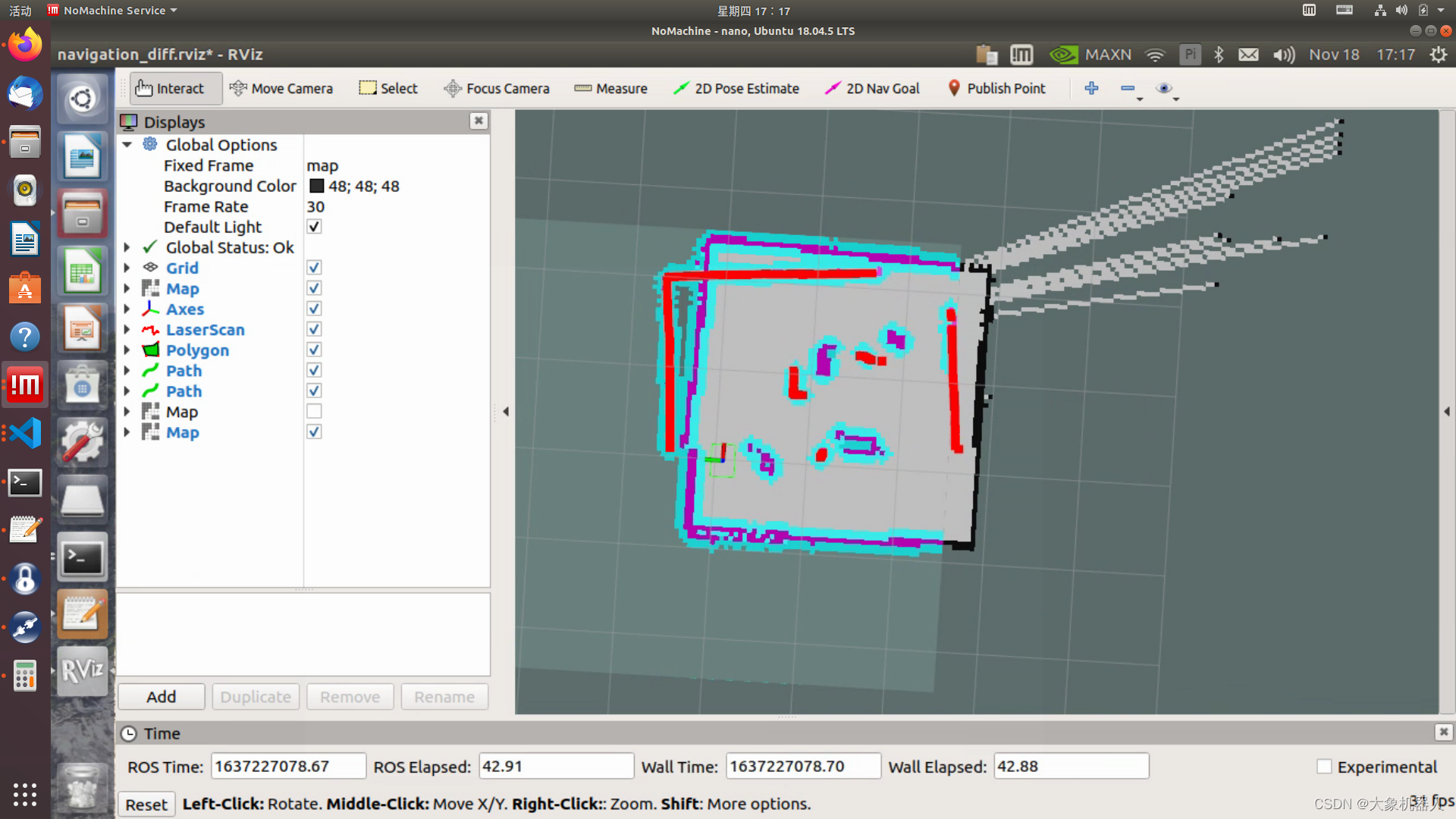
roslaunch limo_bringup limo_start.launch pub_odom_tf:=false(2)启动导航功能,在终端中输入命令:
roslaunch limo_bringup limo_navigation_diff.launch启动成功之后会打开rviz界面,如图
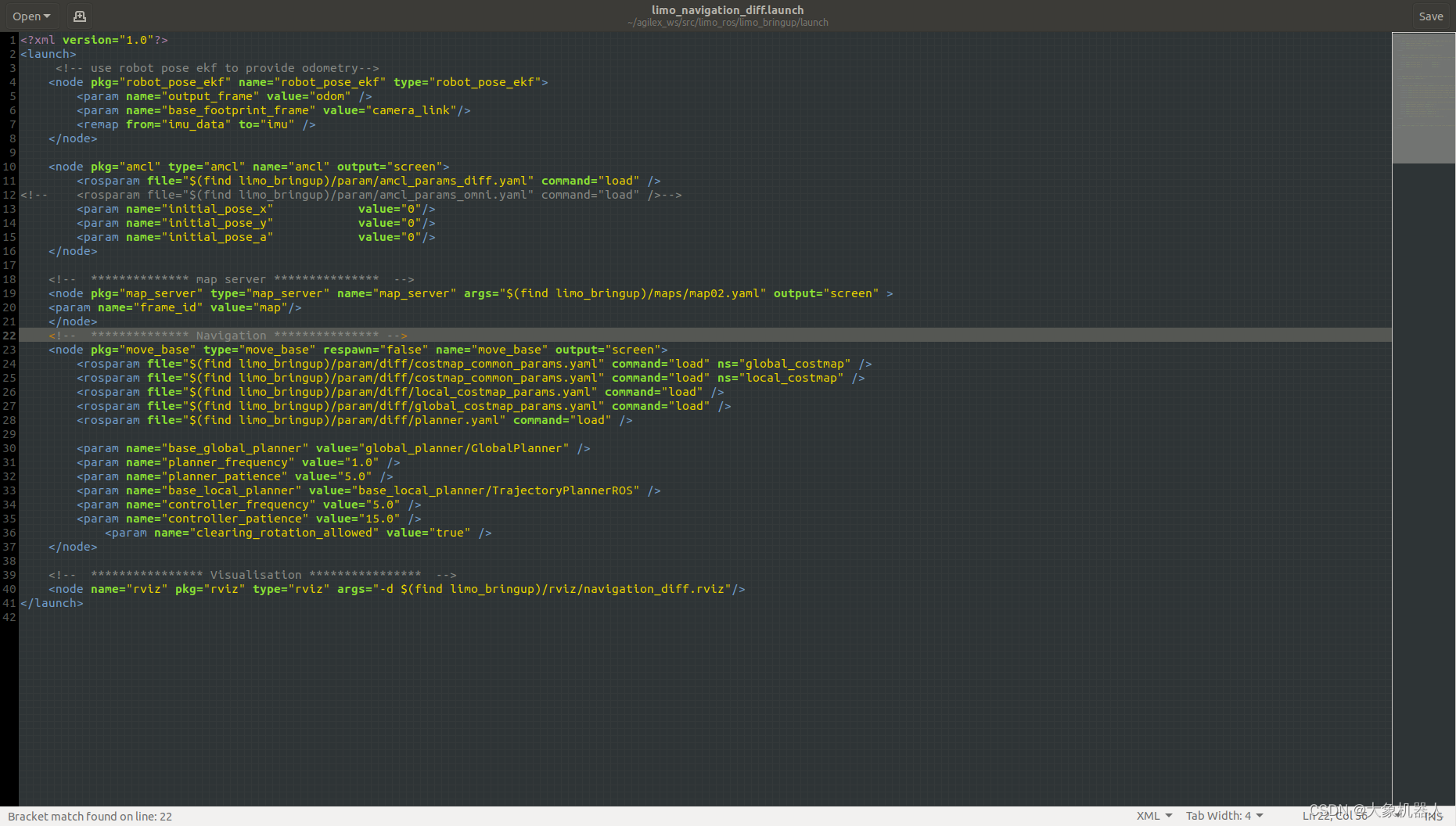
 我们需要把刚才建的地图给导进去,请打开limo_navigation_diff.launch 文件修改参数, 文件所在目录为:~/agilex_ws/src/limo_ros/limo_bringup/launch。把map02修改为需要更换的地图名称。
我们需要把刚才建的地图给导进去,请打开limo_navigation_diff.launch 文件修改参数, 文件所在目录为:~/agilex_ws/src/limo_ros/limo_bringup/launch。把map02修改为需要更换的地图名称。
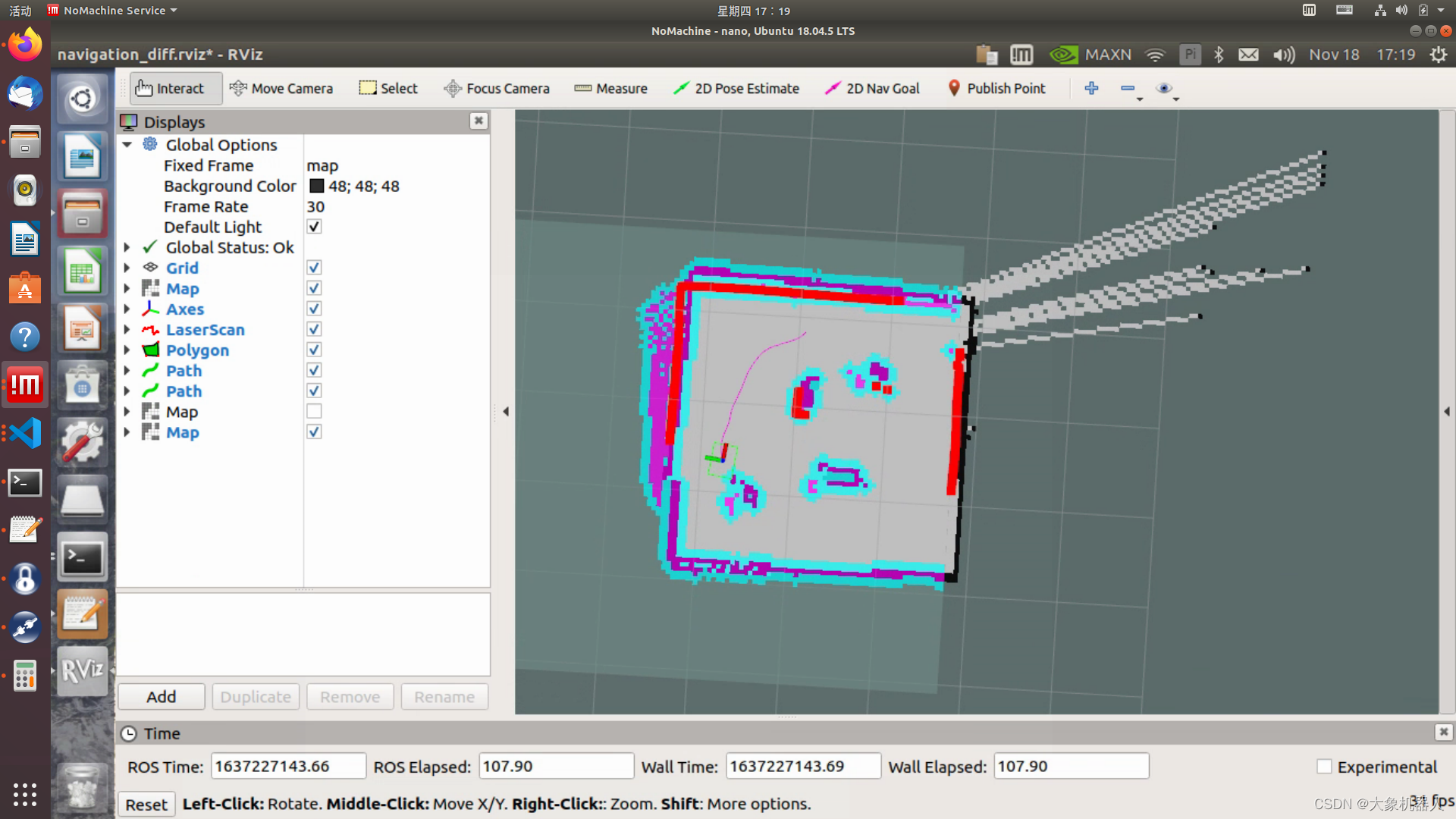
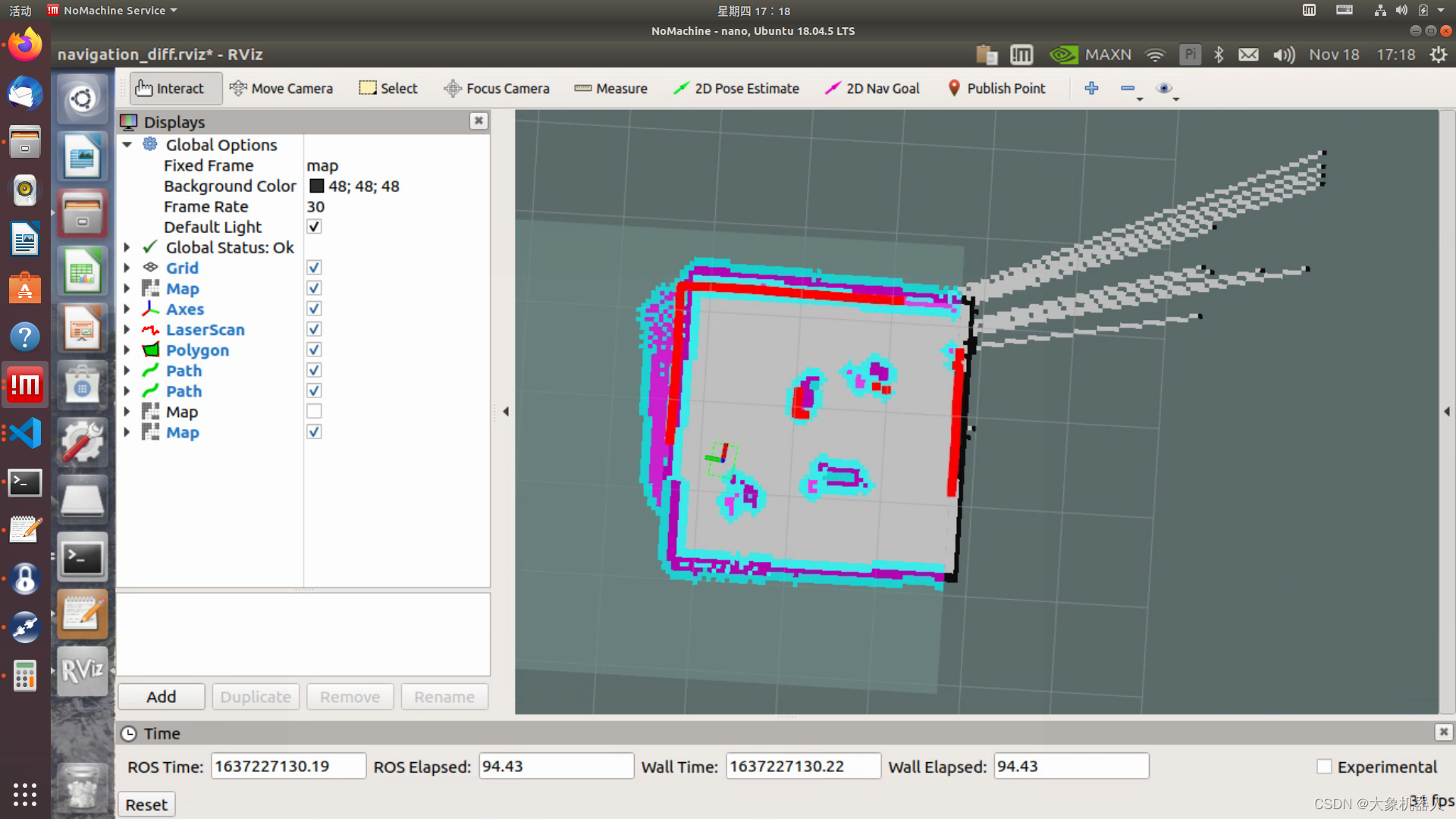
开启导航之后,会发现激光扫描出来的形状和地图没有重合,需要我们手动校正,在rviz中显示的地图上矫正底盘在场景中实际的位置,通过rviz中的工具,发布一个大概的位置,给limo一个大致的位置,然后通过手柄遥控limo旋转,让其自动校正,当激光形状和地图中的场景形状重叠的时候,校正完成。操作步骤如图 :
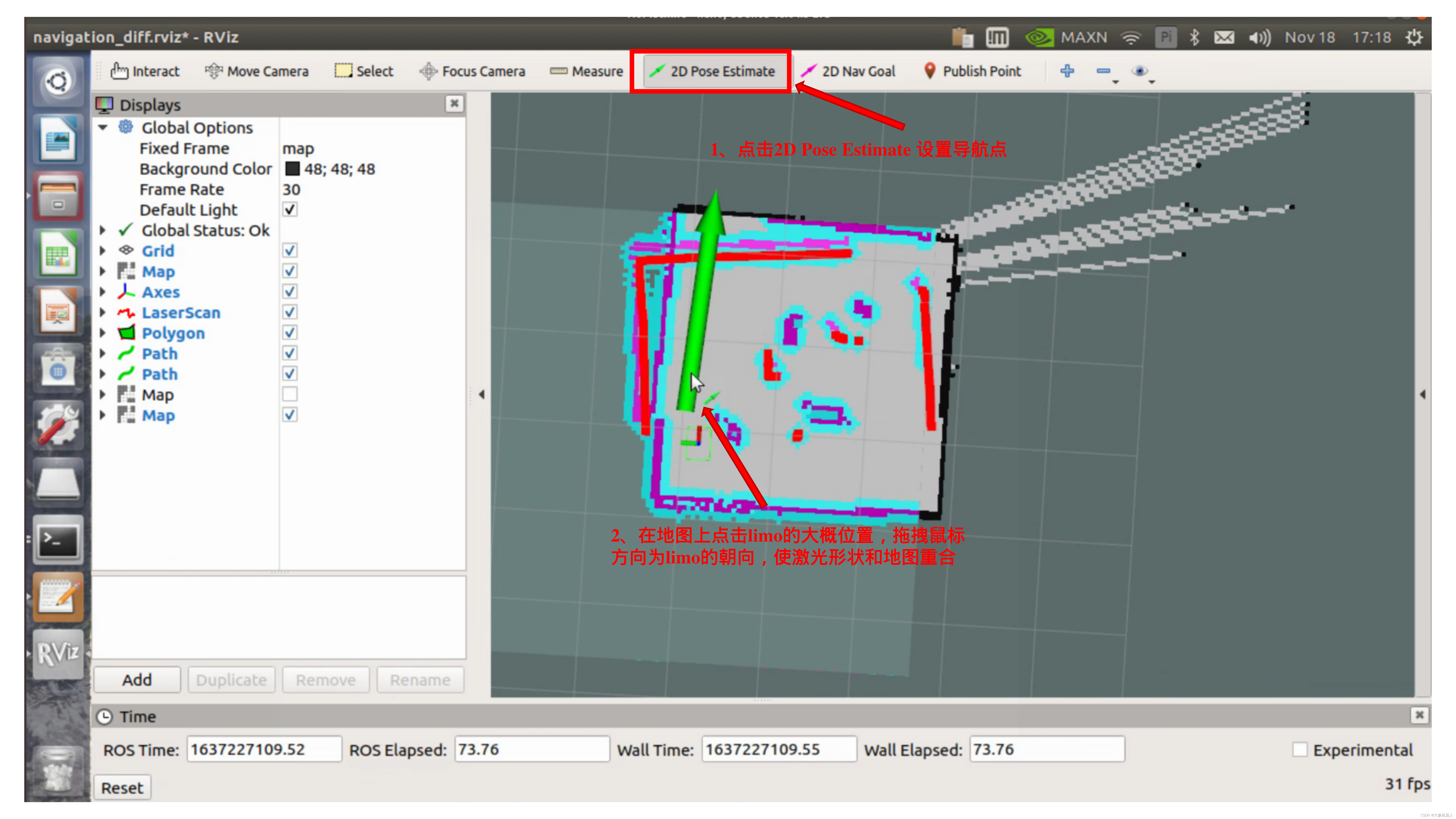
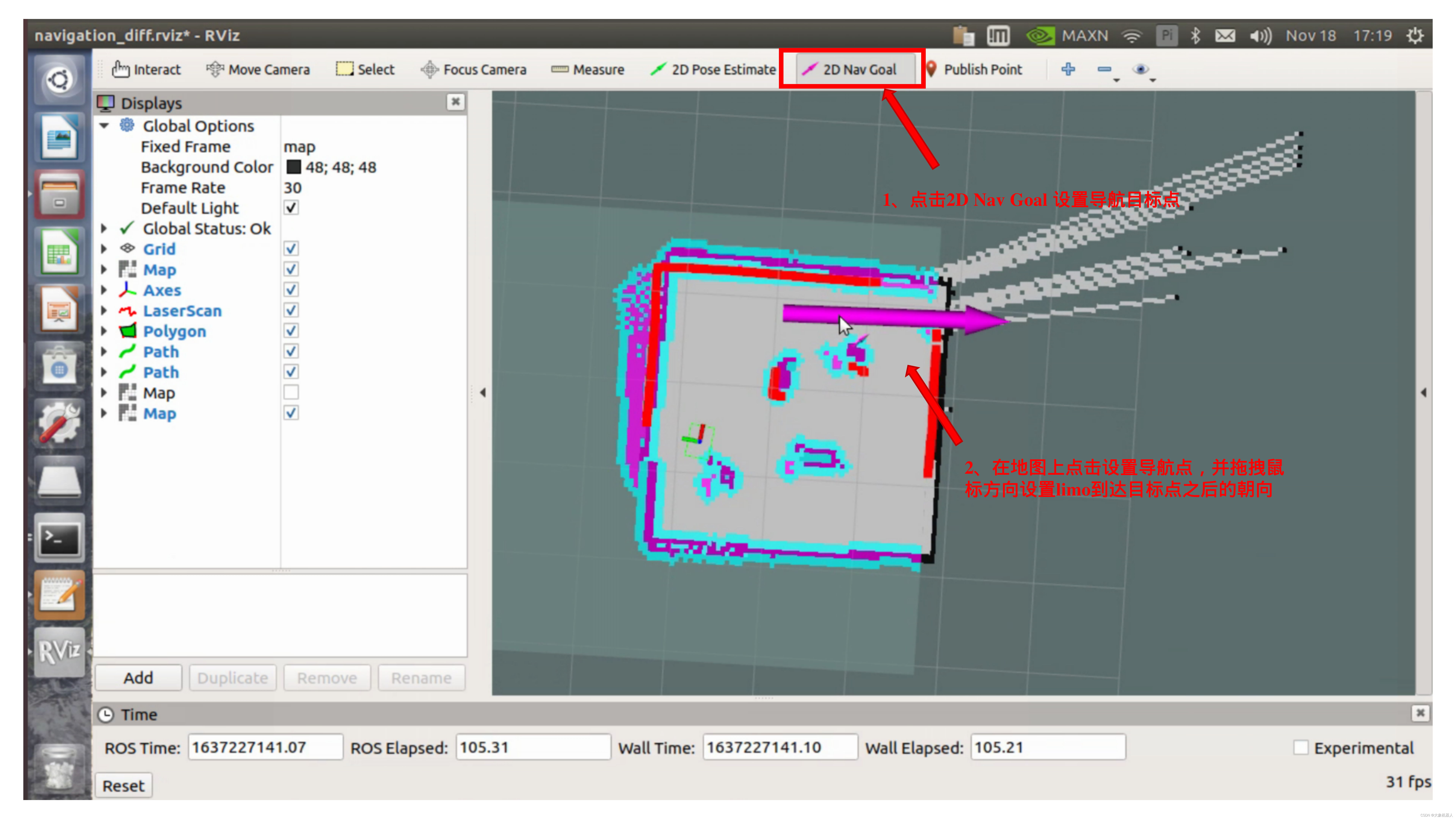
校正完成后
通过2D Nav Goal 设置导航目标点
路径巡检
如果要在一条路上来回运动的话,我们要启用路径巡检功能,后续会使用上这个功能。
(1)首先启动雷达,开启一个新的终端,在终端中输入命令:
roslaunch limo_bringup limo_start.launch pub_odom_tf:=false(2)启动导航功能,开启一个新的终端,在终端中输入命令:
roslaunch limo_bringup limo_navigation_diff.launch注:如果是阿克曼运动模式,请运行
roslaunch limo_bringup limo_navigation_ackerman.launch(3)启动路径记录功能,开启一个新的终端,在终端中输入命令:
roslaunch agilex_pure_pursuit record_path.launch路径记录结束之后终止路径记录程序,在终端中输入命令为:Ctrl+c
(4)启动路径巡检功能,开启一个新的终端,在终端中输入命令:
注:把手柄调至指令模式
roslaunch agilex_pure_pursuit pure_pursuit.launch两个系统的集成
上面分布完成了myCobot机械臂视觉的抓取,LIMO的建图导航,路径巡检功能,现在我们需要把它们集成在ROS系统上。我们预设的场景是,LIMO进行定点的巡检,当遇到了标志物的时候停止运动,等待机械臂执行抓取物体,完成之后LIMO移动到下一个点位。
功能节点分布
在ROS(Robot Operating System)中实现一个功能的流程涉及到多个步骤和组件,包括节点(nodes)、话题(topics)、服务(services)、参数服务器(parameter server)和动作(actions)。根据ROS的功能节点架构,我们确定了节点的分布和它们交互的方式:
1. 图像识别节点(Image Recognition Node)
- 职责:持续接收来自摄像头的图像流,使用图像识别算法(如OpenCV或深度学习模型)来检测特定的标记物。
- 输入:来自摄像头的图像流。
- 输出:当检测到标记物时,发布一个消息到一个特定的话题(如/marker_detected)。
2. 控制节点(Control Node)
- 职责:管理机器人的移动,包括启动、停止和继续巡检。
- 输入:订阅/marker_detected话题以监听图像识别节点的输出。也可能订阅一个专门用于接收手动控制指令的话题(如/control_commands)。
- 输出:向机器人底层控制系统(如驱动电机的节点)发送控制命令。
3. 任务执行节点(Task Execution Node)
- 职责:执行遇到标记物后的特定任务,这些任务可以是数据采集、状态报告等。
- 输入:监听来自控制节点的指令,这些指令指示何时开始执行任务。
- 输出:任务完成的状态反馈,可能会发送到控制节点或一个专门的状态话题(如/task_status)。
4. 导航和路径规划节点(Navigation and Path Planning Node)
- 职责:处理机器人的路径规划和导航逻辑,确保机器人可以在环境中安全移动。
- 输入:接收来自控制节点的指令,用于启动、停止或调整导航路径。
- 输出:向机器人底层控制系统发送导航指令,如目标位置、速度和方向。
总结
这个场景算是初步完成了,其实还可以添加许多细节的,比如说在行径的过程中增添一些移动的障碍物,又或者设定一个红绿灯之类的物体,更加接近真实的场景。如果你们觉得有什么需要改善的地方,又或者说你想用 LIMO cobot 来做一些什么,尽管畅所欲言,你的回复和点赞就是我们更新最大的动力!
相关文章:
结合大象机器人六轴协作机械臂myCobot 280 ,解决特定的自动化任务和挑战!(下)
Limo Pro 小车建图导航 引言 前景提要:我们在上文介绍了使用LIMO cobot 实现一个能够执行复杂任务的复合机器人系统的应用场景的项目,从以下三个方面:概念设计、系统架构以及关键组件。 本文主要深入项目内核的主要部分,同样也主要…...
加速 Webpack 构建:提升效率的秘诀
🤍 前端开发工程师、技术日更博主、已过CET6 🍨 阿珊和她的猫_CSDN博客专家、23年度博客之星前端领域TOP1 🕠 牛客高级专题作者、打造专栏《前端面试必备》 、《2024面试高频手撕题》 🍚 蓝桥云课签约作者、上架课程《Vue.js 和 E…...

Qt自定义标题栏的多屏适配
标题栏自定义 参考博客 : https://blog.csdn.net/goforwardtostep/article/details/53494800 多屏适配 MyTitleBar类抽象定义了自定义标题栏,使用起来相对方便。但是在多屏情况下,窗口初次显示只能在主屏幕上,如果拖到其他屏幕…...

【MySQL篇】 MySQL基础学习
文章目录 前言基础数据类型DDL数据库操作查询数据库创建数据库删除数据库使用数据库 DDL表操作创建表查询表修改表删除 DML-增删改添加数据更改数据删除数据 DQL-查询基础查询条件查询聚合函数分组查询排序查询分页查询编写顺序 DML-用户及权限用户管理权限控制 函数字符串函数…...

Qt多弹窗实现包括QDialog、QWidget、QMainWindow
1.相关说明 独立Widget窗口、嵌入式Widget、嵌入式MainWindow窗口、独立MainWindow窗口等弹窗的实现 相关界面包含关系 2.相关界面 3.相关代码 mainwindow.cpp #include "mainwindow.h" #include "ui_mainwindow.h" #include "tformdoc.h" #incl…...

Django高级之-forms组件
Django高级之-forms组件 1 校验字段功能 针对一个实例:注册用户讲解。 模型:models.py class UserInfo(models.Model):namemodels.CharField(max_length32)pwdmodels.CharField(max_length32)emailmodels.EmailField()模版文件 <!DOCTYPE html&g…...

GPT实战系列-LangChain实现简单链
GPT实战系列-LangChain实现简单链 LangChain GPT实战系列-LangChain如何构建基通义千问的多工具链 GPT实战系列-构建多参数的自定义LangChain工具 GPT实战系列-通过Basetool构建自定义LangChain工具方法 GPT实战系列-一种构建LangChain自定义Tool工具的简单方法 GPT实战系…...

关于tomcat服务器配置及性能优化的20道高级面试题
1. 请描述Tomcat服务器的基本架构和组件。 Tomcat服务器的基本架构主要包括Server、Service、Connector和Container等组件。具体来看: Server:是Tomcat中最顶层的容器,代表着整个服务器。它负责运行Tomcat服务器,例如打开和关闭…...
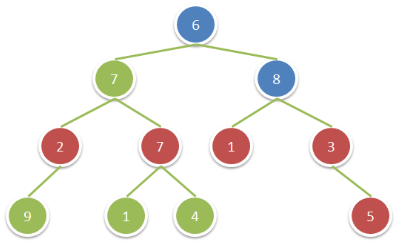
LeetCode 1315.祖父节点值为偶数的节点和
给你一棵二叉树,请你返回满足以下条件的所有节点的值之和: 该节点的祖父节点的值为偶数。(一个节点的祖父节点是指该节点的父节点的父节点。) 如果不存在祖父节点值为偶数的节点,那么返回 0 。 示例: 输入…...

C语言分支和循环总结
文章目录 概要结构介绍不同结构的语句简单运用小结 概要 C语言中分为三种结构:顺序结构,选择结构,循环结构 结构介绍 顺序结构就是从上到下,从左到右等等;选择结构可以想象是Y字路口就是到了一个地方会有不同的道路…...

【Echarts】曲线图上方显示数字以及自定义值,标题和副标题居中,鼠标上显示信息以及自定义信息
欢迎来到《小5讲堂》 大家好,我是全栈小5。 这是《前端》系列文章,每篇文章将以博主理解的角度展开讲解, 特别是针对知识点的概念进行叙说,大部分文章将会对这些概念进行实际例子验证,以此达到加深对知识点的理解和掌握…...
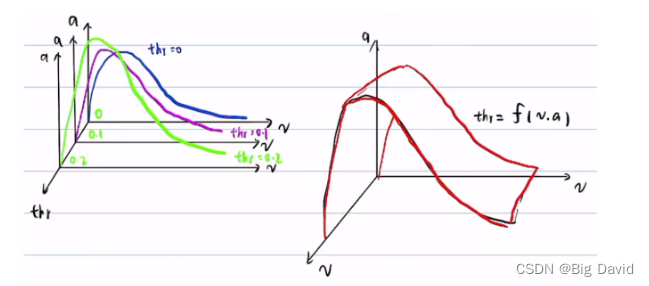
双环PID控制详细讲解
参考博客: (1)PID双环控制(速度环和位置环) (2)PID控制(四)(单环与双环PID) (3)内外双环pid算法 0 单环PID 目标位置→系…...

深入解析Java内存模型
一、背景 并发编程本质问题是:CPU、内存以及IO三者之间的速度差异。CPU速度快于内存、内存访问速度又远远快于IO,根据木桶理论,程序性能取决于最慢的操作,即IO操作。这样会出现CPU和内存交互时,CPU性能无法被充分利用…...

python使用国内镜像源
使用格式 格式为:pip install 库名 -i 镜像地址(注意空格的存在) pip install pandas -i https://pypi.tuna.tsinghua.edu.cn/simple 推荐的镜像源: 清华大学(推荐):https://pypi.tuna.tsing…...
【动态规划】代码随想录算法训练营第四十六天 |139.单词拆分,关于多重背包,你该了解这些! ,背包问题总结篇!(待补充)
139.单词拆分 1、题目链接:. - 力扣(LeetCode) 2、文章讲解:代码随想录 3、题目: 给定一个非空字符串 s 和一个包含非空单词的列表 wordDict,判定 s 是否可以被空格拆分为一个或多个在字典中出现的单词…...
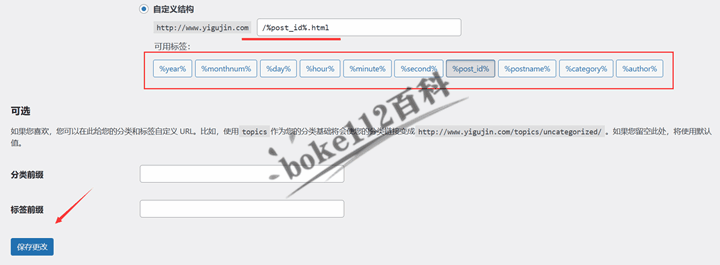
WordPress建站入门教程:如何选择和设置固定链接结构?
我们成功搭建好WordPress网站后,发布的文章对应的URL地址默认是使用“日期和名称型”,即是网站域名跟着的是年月日,最后是文章标题,如http://www.yigujin.com/2024/03/06/免费响应式WordPress博客主题JianYue/ 为了让我们的文章U…...

一款好用的AI工具——边界AICHAT(三)
目录 3.23、文档生成PPT演示3.24、AI文档翻译3.25、AI翻译3.26、论文模式3.27、文章批改3.28、文章纠正3.29、写作助手3.30、文言文翻译3.31、日报周报月报生成器3.32、OCR-DOC办公文档识别3.33、AI真人语音合成3.34、录音音频总结3.35、域方模型市场3.36、模型创建3.37、社区交…...

编程示例: 矩阵的多项式计算以javascript语言为例
编程示例: 矩阵的多项式计算以javascript语言为例 国防工业出版社的《矩阵理论》一书中第一章第8个习题 试计算2*A^8-3*A^5A^4A^2-4I A[[1,0,2],[0,-1,1],[0,1,0]] 代码如下 <html> <head> <title> 矩阵乘法 </title> <script srcset.js ><…...

project generator 简单使用
文章目录 1 progen 资源2 使用简介2.1 安装2.2 添加 target(可选)2.3 替换 CMake 模板(可选)2.4 创建 progen 项目 3 总结 1 progen 资源 0)简介:progen(project-generator,项目生成…...
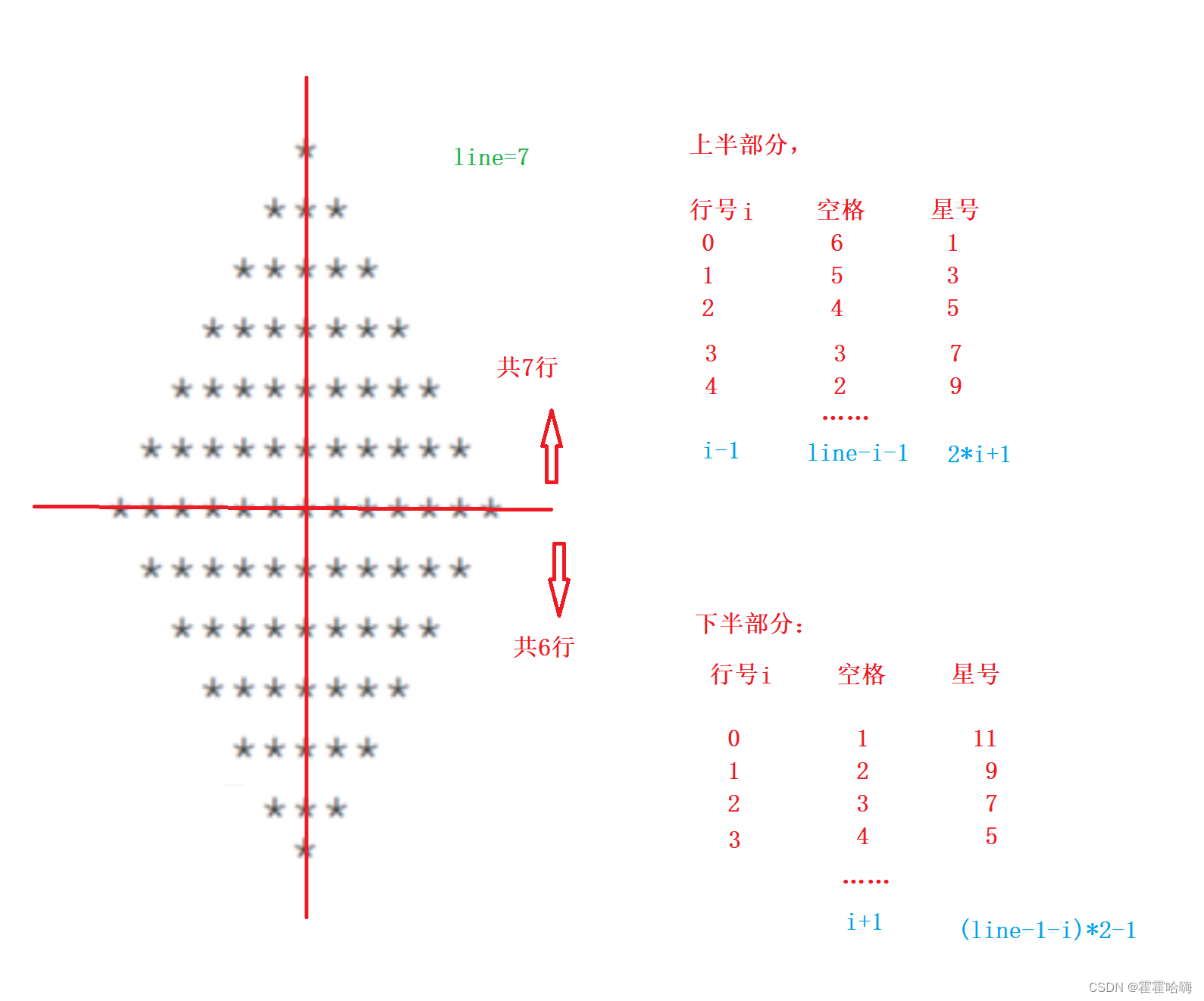
C语言 —— 图形打印
题目1: 思路: 如果我们要打印一个实心正方形,其实就是一个二维数组,i控制行,j控制列,行列不需要控制,arr[i][j]直接打印星号即可。 对于空心正方形,我们只需要控制行和列的条件&…...

Ventoy终极指南:一个U盘启动所有系统,告别重复格式化烦恼 [特殊字符]
Ventoy终极指南:一个U盘启动所有系统,告别重复格式化烦恼 😎 【免费下载链接】Ventoy A new bootable USB solution. 项目地址: https://gitcode.com/GitHub_Trending/ve/Ventoy 还在为每次安装系统都要重新制作启动盘而烦恼吗&#x…...

Visual Studio 项目属性页开发完全教程:从基础到高级
Visual Studio 项目属性页开发完全教程:从基础到高级 【免费下载链接】project-system The .NET Project System for Visual Studio 项目地址: https://gitcode.com/gh_mirrors/pr/project-system Visual Studio 项目属性页是开发者管理项目配置的核心界面&a…...

告别沉浸式白屏!UniApp中iOS/Android底部安全区与顶部状态栏颜色自定义全攻略
告别沉浸式白屏!UniApp中iOS/Android底部安全区与顶部状态栏颜色自定义全攻略当开发者尝试在UniApp中实现沉浸式设计时,往往会遇到一个令人头疼的问题——默认的白色安全区和状态栏导致界面元素(如电池图标、信号强度)几乎不可见。…...

别再盲跑了!手把手教你用Arduino Zero在IDE 2.0里设置断点单步调试
告别盲跑时代:Arduino Zero与IDE 2.0的源码级调试实战指南 当你的Arduino项目逻辑越来越复杂,仅靠串口打印调试就像在迷宫里摸黑前行——直到遇见Arduino Zero与IDE 2.0的调试组合。本文将揭示如何用这套工具实现 源码级精准调试 ,即使你手…...

为什么92%的DeepSeek二次开发团队在6个月内遭遇交付延迟?——基于17个真实项目的技术债务归因分析
更多请点击: https://intelliparadigm.com 第一章:为什么92%的DeepSeek二次开发团队在6个月内遭遇交付延迟?——基于17个真实项目的技术债务归因分析 在对17个采用DeepSeek-R1/VL模型开展定制化开发的工业级项目进行回溯审计后,我…...

终极艾尔登法环帧率解锁指南:轻松突破60FPS限制
终极艾尔登法环帧率解锁指南:轻松突破60FPS限制 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirrors/el/EldenRing…...
)
Postgresql基础实践教程(九)
⭐️⭐️⭐️⭐️⭐️ 完整数据详见 练习数据免费 ⭐️⭐️⭐️⭐️⭐️ 七十二、WITH查询(公用表表达式CTE) 1. SELECT 中的 WITH 2. 递归查询 3. 公用表表达式的物化 4. WITH中的数据修改语句 WITH提供了一种在主查询中写辅助语句的方法。这些语…...
适合全体毕业生)
口碑最好的AI论文写作工具推荐(从文献整理到论文成稿全流程)适合全体毕业生
还在为选题方向纠结、文献资料翻找耗时、开题报告无从下手、论文框架反复修改、查重率居高不下、降重过程痛苦不堪,甚至答辩PPT还要临时抱佛脚?作为学术新手、应届生或本科硕士毕业生,面对论文写作的重重关卡,流程复杂、操作门槛高…...
)
别再死磕USB HID了!用ESP32的Arduino框架手把手教你实现蓝牙鼠标键盘(附完整代码)
ESP32蓝牙HID实战:零基础打造自定义键盘鼠标 手里那块吃灰的ESP32开发板终于能派上用场了!上周我用它做了个无线演示控制器,在会议室里走着就能翻PPT,同事们都问是怎么实现的。其实秘诀就在于ESP32的蓝牙HID功能——不需要任何USB…...

如何快速解锁艾尔登法环帧率限制:终极性能优化指南
如何快速解锁艾尔登法环帧率限制:终极性能优化指南 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirrors/el/EldenR…...