android so载入过程
源自android 9
看源代码的网页
/bionic/libdl/libdl_static.c 好像没用。都是空的
/bionic/libdl/libdl.cpp 主角
22// These functions are exported by the loader
23// TODO(dimitry): replace these with reference to libc.so101// Proxy calls to bionic loader
102__attribute__((__weak__))
103void* dlopen(const char* filename, int flag) {
104 const void* caller_addr = __builtin_return_address(0);
105 return __loader_dlopen(filename, flag, caller_addr);
106}
/bionic/linker/dlfcn.cpp
152void* __loader_dlopen(const char* filename, int flags, const void* caller_addr) {
153 return dlopen_ext(filename, flags, nullptr, caller_addr);
154}131static void* dlopen_ext(const char* filename,
132 int flags,
133 const android_dlextinfo* extinfo,
134 const void* caller_addr) {
135 ScopedPthreadMutexLocker locker(&g_dl_mutex);
136 g_linker_logger.ResetState();
137 void* result = do_dlopen(filename, flags, extinfo, caller_addr);
138 if (result == nullptr) {
139 __bionic_format_dlerror("dlopen failed", linker_get_error_buffer());
140 return nullptr;
141 }
142 return result;
143}
do_dlopen
/bionic/linker/linker.cpp
49void* do_dlopen(const char* name, int flags,
2050 const android_dlextinfo* extinfo,
2051 const void* caller_addr) {
2052 std::string trace_prefix = std::string("dlopen: ") + (name == nullptr ? "(nullptr)" : name);
2053 ScopedTrace trace(trace_prefix.c_str());
2054 ScopedTrace loading_trace((trace_prefix + " - loading and linking").c_str());
2055 soinfo* const caller = find_containing_library(caller_addr);
2056 android_namespace_t* ns = get_caller_namespace(caller);
2057
2058 LD_LOG(kLogDlopen,
2059 "dlopen(name=\"%s\", flags=0x%x, extinfo=%s, caller=\"%s\", caller_ns=%s@%p) ...",
2060 name,
2061 flags,
2062 android_dlextinfo_to_string(extinfo).c_str(),
2063 caller == nullptr ? "(null)" : caller->get_realpath(),
2064 ns == nullptr ? "(null)" : ns->get_name(),
2065 ns);
2066
2067 auto failure_guard = android::base::make_scope_guard(
2068 [&]() { LD_LOG(kLogDlopen, "... dlopen failed: %s", linker_get_error_buffer()); });
2069
2070 if ((flags & ~(RTLD_NOW|RTLD_LAZY|RTLD_LOCAL|RTLD_GLOBAL|RTLD_NODELETE|RTLD_NOLOAD)) != 0) {
2071 DL_ERR("invalid flags to dlopen: %x", flags);
2072 return nullptr;
2073 }
2074
2075 if (extinfo != nullptr) {
2076 if ((extinfo->flags & ~(ANDROID_DLEXT_VALID_FLAG_BITS)) != 0) {
2077 DL_ERR("invalid extended flags to android_dlopen_ext: 0x%" PRIx64, extinfo->flags);
2078 return nullptr;
2079 }
2080
2081 if ((extinfo->flags & ANDROID_DLEXT_USE_LIBRARY_FD) == 0 &&
2082 (extinfo->flags & ANDROID_DLEXT_USE_LIBRARY_FD_OFFSET) != 0) {
2083 DL_ERR("invalid extended flag combination (ANDROID_DLEXT_USE_LIBRARY_FD_OFFSET without "
2084 "ANDROID_DLEXT_USE_LIBRARY_FD): 0x%" PRIx64, extinfo->flags);
2085 return nullptr;
2086 }
2087
2088 if ((extinfo->flags & ANDROID_DLEXT_LOAD_AT_FIXED_ADDRESS) != 0 &&
2089 (extinfo->flags & (ANDROID_DLEXT_RESERVED_ADDRESS | ANDROID_DLEXT_RESERVED_ADDRESS_HINT)) != 0) {
2090 DL_ERR("invalid extended flag combination: ANDROID_DLEXT_LOAD_AT_FIXED_ADDRESS is not "
2091 "compatible with ANDROID_DLEXT_RESERVED_ADDRESS/ANDROID_DLEXT_RESERVED_ADDRESS_HINT");
2092 return nullptr;
2093 }
2094
2095 if ((extinfo->flags & ANDROID_DLEXT_USE_NAMESPACE) != 0) {
2096 if (extinfo->library_namespace == nullptr) {
2097 DL_ERR("ANDROID_DLEXT_USE_NAMESPACE is set but extinfo->library_namespace is null");
2098 return nullptr;
2099 }
2100 ns = extinfo->library_namespace;
2101 }
2102 }
2103
2104 std::string asan_name_holder;
2105
2106 const char* translated_name = name;
2107 if (g_is_asan && translated_name != nullptr && translated_name[0] == '/') {
2108 char original_path[PATH_MAX];
2109 if (realpath(name, original_path) != nullptr) {
2110 asan_name_holder = std::string(kAsanLibDirPrefix) + original_path;
2111 if (file_exists(asan_name_holder.c_str())) {
2112 soinfo* si = nullptr;
2113 if (find_loaded_library_by_realpath(ns, original_path, true, &si)) {
2114 PRINT("linker_asan dlopen NOT translating \"%s\" -> \"%s\": library already loaded", name,
2115 asan_name_holder.c_str());
2116 } else {
2117 PRINT("linker_asan dlopen translating \"%s\" -> \"%s\"", name, translated_name);
2118 translated_name = asan_name_holder.c_str();
2119 }
2120 }
2121 }
2122 }
2123
2124 ProtectedDataGuard guard;
2125 soinfo* si = find_library(ns, translated_name, flags, extinfo, caller);
2126 loading_trace.End();
2127
2128 if (si != nullptr) {
2129 void* handle = si->to_handle();
2130 LD_LOG(kLogDlopen,
2131 "... dlopen calling constructors: realpath=\"%s\", soname=\"%s\", handle=%p",
2132 si->get_realpath(), si->get_soname(), handle);
2133 si->call_constructors();
2134 failure_guard.Disable();
2135 LD_LOG(kLogDlopen,
2136 "... dlopen successful: realpath=\"%s\", soname=\"%s\", handle=%p",
2137 si->get_realpath(), si->get_soname(), handle);
2138 return handle;
2139 }
2140
2141 return nullptr;
2142}
排除一大堆分支。可以很清楚的发现 核心代码就是调用find_library 来构造一个soinfo 结构体,然后调用soinfo 的to_handle和call_constructors最后把to_handle函数的返回值返回。
soinfo
/bionic/linker/linker_soinfo.h
soinfo 代码太长了就不贴了。看样子内容和elf 的差不多。所以find_library 的任务应该就是把elf 文件的动态链接库文件加工一下放到soinfo结构体中。然后android 通过管理soinfo 来管理所有动态链接库
find_library
/bionic/linker/linker.cpp
1759static soinfo* find_library(android_namespace_t* ns,
1760 const char* name, int rtld_flags,
1761 const android_dlextinfo* extinfo,
1762 soinfo* needed_by) {
1763 soinfo* si = nullptr;
1764
1765 if (name == nullptr) {
1766 si = solist_get_somain();
1767 } else if (!find_libraries(ns,
1768 needed_by,
1769 &name,
1770 1,
1771 &si,
1772 nullptr,
1773 0,
1774 rtld_flags,
1775 extinfo,
1776 false /* add_as_children */,
1777 true /* search_linked_namespaces */)) {
1778 if (si != nullptr) {
1779 soinfo_unload(si);
1780 }
1781 return nullptr;
1782 }
1783
1784 si->increment_ref_count();
1785
1786 return si;
1787}
这个name 就do_dlopen前面一大串代码找到的so路径。 所以一般情况下solist_get_somain 是不会运行的。不过我好奇看了一下这个默认行为是做什么的。
/bionic/linker/linker_main.cpp
59// These should be preserved static to avoid emitting
60// RELATIVE relocations for the part of the code running
61// before linker links itself.
62
63// TODO (dimtiry): remove somain, rename solist to solist_head
64static soinfo* solist;
65static soinfo* sonext;
66static soinfo* somain; // main process, always the one after libdl_info
67static soinfo* vdso; // vdso if present104soinfo* solist_get_somain() {
105 return somain;
106}通过注释好像标识main process ,不过上面有一个remove somain 是不是表示后面要移除的。不过这个不是我们研究的重点
find_libraries 核心装在步骤
/bionic/linker/linker_main.cpp
1504// add_as_children - add first-level loaded libraries (i.e. library_names[], but
1505// not their transitive dependencies) as children of the start_with library.
1506// This is false when find_libraries is called for dlopen(), when newly loaded
1507// libraries must form a disjoint tree.
1508bool find_libraries(android_namespace_t* ns,
1509 soinfo* start_with,
1510 const char* const library_names[],
1511 size_t library_names_count,
1512 soinfo* soinfos[],
1513 std::vector<soinfo*>* ld_preloads,
1514 size_t ld_preloads_count,
1515 int rtld_flags,
1516 const android_dlextinfo* extinfo,
1517 bool add_as_children,
1518 bool search_linked_namespaces,
1519 std::vector<android_namespace_t*>* namespaces) {
1520 // Step 0: prepare.
1521 std::unordered_map<const soinfo*, ElfReader> readers_map;
1522 LoadTaskList load_tasks;
1523
1524 for (size_t i = 0; i < library_names_count; ++i) {
1525 const char* name = library_names[i];
1526 load_tasks.push_back(LoadTask::create(name, start_with, ns, &readers_map));
1527 }
1528
1529 // If soinfos array is null allocate one on stack.
1530 // The array is needed in case of failure; for example
1531 // when library_names[] = {libone.so, libtwo.so} and libone.so
1532 // is loaded correctly but libtwo.so failed for some reason.
1533 // In this case libone.so should be unloaded on return.
1534 // See also implementation of failure_guard below.
1535
1536 if (soinfos == nullptr) {
1537 size_t soinfos_size = sizeof(soinfo*)*library_names_count;
1538 soinfos = reinterpret_cast<soinfo**>(alloca(soinfos_size));
1539 memset(soinfos, 0, soinfos_size);
1540 }
1541
1542 // list of libraries to link - see step 2.
1543 size_t soinfos_count = 0;
1544
1545 auto scope_guard = android::base::make_scope_guard([&]() {
1546 for (LoadTask* t : load_tasks) {
1547 LoadTask::deleter(t);
1548 }
1549 });
1550
1551 ZipArchiveCache zip_archive_cache;
1552
1553 // Step 1: expand the list of load_tasks to include
1554 // all DT_NEEDED libraries (do not load them just yet)
1555 for (size_t i = 0; i<load_tasks.size(); ++i) {
1556 LoadTask* task = load_tasks[i];
1557 soinfo* needed_by = task->get_needed_by();
1558
1559 bool is_dt_needed = needed_by != nullptr && (needed_by != start_with || add_as_children);
1560 task->set_extinfo(is_dt_needed ? nullptr : extinfo);
1561 task->set_dt_needed(is_dt_needed);
1562
1563 // Note: start from the namespace that is stored in the LoadTask. This namespace
1564 // is different from the current namespace when the LoadTask is for a transitive
1565 // dependency and the lib that created the LoadTask is not found in the
1566 // current namespace but in one of the linked namespace.
1567 if (!find_library_internal(const_cast<android_namespace_t*>(task->get_start_from()),
1568 task,
1569 &zip_archive_cache,
1570 &load_tasks,
1571 rtld_flags,
1572 search_linked_namespaces || is_dt_needed)) {
1573 return false;
1574 }
1575
1576 soinfo* si = task->get_soinfo();
1577
1578 if (is_dt_needed) {
1579 needed_by->add_child(si);
1580 }
1581
1582 // When ld_preloads is not null, the first
1583 // ld_preloads_count libs are in fact ld_preloads.
1584 if (ld_preloads != nullptr && soinfos_count < ld_preloads_count) {
1585 ld_preloads->push_back(si);
1586 }
1587
1588 if (soinfos_count < library_names_count) {
1589 soinfos[soinfos_count++] = si;
1590 }
1591 }
1592
1593 // Step 2: Load libraries in random order (see b/24047022)
1594 LoadTaskList load_list;
1595 for (auto&& task : load_tasks) {
1596 soinfo* si = task->get_soinfo();
1597 auto pred = [&](const LoadTask* t) {
1598 return t->get_soinfo() == si;
1599 };
1600
1601 if (!si->is_linked() &&
1602 std::find_if(load_list.begin(), load_list.end(), pred) == load_list.end() ) {
1603 load_list.push_back(task);
1604 }
1605 }
1606 shuffle(&load_list);
1607
1608 for (auto&& task : load_list) {
1609 if (!task->load()) {
1610 return false;
1611 }
1612 }
1613
1614 // Step 3: pre-link all DT_NEEDED libraries in breadth first order.
1615 for (auto&& task : load_tasks) {
1616 soinfo* si = task->get_soinfo();
1617 if (!si->is_linked() && !si->prelink_image()) {
1618 return false;
1619 }
1620 }
1621
1622 // Step 4: Construct the global group. Note: DF_1_GLOBAL bit of a library is
1623 // determined at step 3.
1624
1625 // Step 4-1: DF_1_GLOBAL bit is force set for LD_PRELOADed libs because they
1626 // must be added to the global group
1627 if (ld_preloads != nullptr) {
1628 for (auto&& si : *ld_preloads) {
1629 si->set_dt_flags_1(si->get_dt_flags_1() | DF_1_GLOBAL);
1630 }
1631 }
1632
1633 // Step 4-2: Gather all DF_1_GLOBAL libs which were newly loaded during this
1634 // run. These will be the new member of the global group
1635 soinfo_list_t new_global_group_members;
1636 for (auto&& task : load_tasks) {
1637 soinfo* si = task->get_soinfo();
1638 if (!si->is_linked() && (si->get_dt_flags_1() & DF_1_GLOBAL) != 0) {
1639 new_global_group_members.push_back(si);
1640 }
1641 }
1642
1643 // Step 4-3: Add the new global group members to all the linked namespaces
1644 if (namespaces != nullptr) {
1645 for (auto linked_ns : *namespaces) {
1646 for (auto si : new_global_group_members) {
1647 if (si->get_primary_namespace() != linked_ns) {
1648 linked_ns->add_soinfo(si);
1649 si->add_secondary_namespace(linked_ns);
1650 }
1651 }
1652 }
1653 }
1654
1655 // Step 5: Collect roots of local_groups.
1656 // Whenever needed_by->si link crosses a namespace boundary it forms its own local_group.
1657 // Here we collect new roots to link them separately later on. Note that we need to avoid
1658 // collecting duplicates. Also the order is important. They need to be linked in the same
1659 // BFS order we link individual libraries.
1660 std::vector<soinfo*> local_group_roots;
1661 if (start_with != nullptr && add_as_children) {
1662 local_group_roots.push_back(start_with);
1663 } else {
1664 CHECK(soinfos_count == 1);
1665 local_group_roots.push_back(soinfos[0]);
1666 }
1667
1668 for (auto&& task : load_tasks) {
1669 soinfo* si = task->get_soinfo();
1670 soinfo* needed_by = task->get_needed_by();
1671 bool is_dt_needed = needed_by != nullptr && (needed_by != start_with || add_as_children);
1672 android_namespace_t* needed_by_ns =
1673 is_dt_needed ? needed_by->get_primary_namespace() : ns;
1674
1675 if (!si->is_linked() && si->get_primary_namespace() != needed_by_ns) {
1676 auto it = std::find(local_group_roots.begin(), local_group_roots.end(), si);
1677 LD_LOG(kLogDlopen,
1678 "Crossing namespace boundary (si=%s@%p, si_ns=%s@%p, needed_by=%s@%p, ns=%s@%p, needed_by_ns=%s@%p) adding to local_group_roots: %s",
1679 si->get_realpath(),
1680 si,
1681 si->get_primary_namespace()->get_name(),
1682 si->get_primary_namespace(),
1683 needed_by == nullptr ? "(nullptr)" : needed_by->get_realpath(),
1684 needed_by,
1685 ns->get_name(),
1686 ns,
1687 needed_by_ns->get_name(),
1688 needed_by_ns,
1689 it == local_group_roots.end() ? "yes" : "no");
1690
1691 if (it == local_group_roots.end()) {
1692 local_group_roots.push_back(si);
1693 }
1694 }
1695 }
1696
1697 // Step 6: Link all local groups
1698 for (auto root : local_group_roots) {
1699 soinfo_list_t local_group;
1700 android_namespace_t* local_group_ns = root->get_primary_namespace();
1701
1702 walk_dependencies_tree(root,
1703 [&] (soinfo* si) {
1704 if (local_group_ns->is_accessible(si)) {
1705 local_group.push_back(si);
1706 return kWalkContinue;
1707 } else {
1708 return kWalkSkip;
1709 }
1710 });
1711
1712 soinfo_list_t global_group = local_group_ns->get_global_group();
1713 bool linked = local_group.visit([&](soinfo* si) {
1714 // Even though local group may contain accessible soinfos from other namesapces
1715 // we should avoid linking them (because if they are not linked -> they
1716 // are in the local_group_roots and will be linked later).
1717 if (!si->is_linked() && si->get_primary_namespace() == local_group_ns) {
1718 if (!si->link_image(global_group, local_group, extinfo) ||
1719 !get_cfi_shadow()->AfterLoad(si, solist_get_head())) {
1720 return false;
1721 }
1722 }
1723
1724 return true;
1725 });
1726
1727 if (!linked) {
1728 return false;
1729 }
1730 }
1731
1732 // Step 7: Mark all load_tasks as linked and increment refcounts
1733 // for references between load_groups (at this point it does not matter if
1734 // referenced load_groups were loaded by previous dlopen or as part of this
1735 // one on step 6)
1736 if (start_with != nullptr && add_as_children) {
1737 start_with->set_linked();
1738 }
1739
1740 for (auto&& task : load_tasks) {
1741 soinfo* si = task->get_soinfo();
1742 si->set_linked();
1743 }
1744
1745 for (auto&& task : load_tasks) {
1746 soinfo* si = task->get_soinfo();
1747 soinfo* needed_by = task->get_needed_by();
1748 if (needed_by != nullptr &&
1749 needed_by != start_with &&
1750 needed_by->get_local_group_root() != si->get_local_group_root()) {
1751 si->increment_ref_count();
1752 }
1753 }
1754
1755
1756 return true;
1757}
看到这我第一时间感觉这块代码是不是大改过。应该是随着android迭代而增加的。本来不想粘怎么多代码的。但是看它写了这个函数的具体的操作的步骤,我就简单写一下把
- 全部代码都是围绕着LoadTask列表操作。第一步就是把所有依赖的so都找出来初始化load_tasks 列表。这个列表是 std::vector<LoadTask*>,猜测所有载入操作实际就是在LoadTask类中进行的。
- 调用LoadTask的load 方法载入so
- 后面就是处理载入的so,然后进行linking。至于什么namespace,local group和global group是啥,我也不明白,就先不写了
- 最后做一些首尾的清理工作。这一套走完。我们的soinfos就初始化玩了。
最后我们看一下find_library_internal,其实也没啥可看的,都是比较底层的工作,一层层调用之后。最后就是读so的磁盘文件。之后他们负责初始化传进来的LoadTask的类。初始化好了之后,以后LoadTask调用load方法就就完成载入了。
/bionic/linker/linker.cpp
1442static bool find_library_internal(android_namespace_t* ns,
1443 LoadTask* task,
1444 ZipArchiveCache* zip_archive_cache,
1445 LoadTaskList* load_tasks,
1446 int rtld_flags,
1447 bool search_linked_namespaces) {
1448 soinfo* candidate;
1449
1450 if (find_loaded_library_by_soname(ns, task->get_name(), search_linked_namespaces, &candidate)) {
1451 task->set_soinfo(candidate);
1452 return true;
1453 }
1454
1455 // Library might still be loaded, the accurate detection
1456 // of this fact is done by load_library.
1457 TRACE("[ \"%s\" find_loaded_library_by_soname failed (*candidate=%s@%p). Trying harder...]",
1458 task->get_name(), candidate == nullptr ? "n/a" : candidate->get_realpath(), candidate);
1459
1460 if (load_library(ns, task, zip_archive_cache, load_tasks, rtld_flags, search_linked_namespaces)) {
1461 return true;
1462 }
1463
1464 if (search_linked_namespaces) {
1465 // if a library was not found - look into linked namespaces
1466 // preserve current dlerror in the case it fails.
1467 DlErrorRestorer dlerror_restorer;
1468 for (auto& linked_namespace : ns->linked_namespaces()) {
1469 if (find_library_in_linked_namespace(linked_namespace,
1470 task)) {
1471 if (task->get_soinfo() == nullptr) {
1472 // try to load the library - once namespace boundary is crossed
1473 // we need to load a library within separate load_group
1474 // to avoid using symbols from foreign namespace while.
1475 //
1476 // However, actual linking is deferred until when the global group
1477 // is fully identified and is applied to all namespaces.
1478 // Otherwise, the libs in the linked namespace won't get symbols from
1479 // the global group.
1480 if (load_library(linked_namespace.linked_namespace(), task, zip_archive_cache, load_tasks, rtld_flags, false)) {
1481 return true;
1482 }
1483 } else {
1484 // lib is already loaded
1485 return true;
1486 }
1487 }
1488 }
1489 }
1490
1491 return false;
1492}
14931322static bool load_library(android_namespace_t* ns,
1323 LoadTask* task,
1324 ZipArchiveCache* zip_archive_cache,
1325 LoadTaskList* load_tasks,
1326 int rtld_flags,
1327 bool search_linked_namespaces) {
1328 const char* name = task->get_name();
1329 soinfo* needed_by = task->get_needed_by();
1330 const android_dlextinfo* extinfo = task->get_extinfo();
1331
1332 off64_t file_offset;
1333 std::string realpath;
1334 if (extinfo != nullptr && (extinfo->flags & ANDROID_DLEXT_USE_LIBRARY_FD) != 0) {
1335 file_offset = 0;
1336 if ((extinfo->flags & ANDROID_DLEXT_USE_LIBRARY_FD_OFFSET) != 0) {
1337 file_offset = extinfo->library_fd_offset;
1338 }
1339
1340 if (!realpath_fd(extinfo->library_fd, &realpath)) {
1341 PRINT("warning: unable to get realpath for the library \"%s\" by extinfo->library_fd. "
1342 "Will use given name.", name);
1343 realpath = name;
1344 }
1345
1346 task->set_fd(extinfo->library_fd, false);
1347 task->set_file_offset(file_offset);
1348 return load_library(ns, task, load_tasks, rtld_flags, realpath, search_linked_namespaces);
1349 }
1350
1351 // Open the file.
1352 int fd = open_library(ns, zip_archive_cache, name, needed_by, &file_offset, &realpath);
1353 if (fd == -1) {
1354 DL_ERR("library \"%s\" not found", name);
1355 return false;
1356 }
1357
1358 task->set_fd(fd, true);
1359 task->set_file_offset(file_offset);
1360
1361 return load_library(ns, task, load_tasks, rtld_flags, realpath, search_linked_namespaces);
1362}
1363
1364static bool find_loaded_library_by_soname(android_namespace_t* ns,
1365 const char* name,
1366 soinfo** candidate) {
1367 return !ns->soinfo_list().visit([&](soinfo* si) {
1368 const char* soname = si->get_soname();
1369 if (soname != nullptr && (strcmp(name, soname) == 0)) {
1370 *candidate = si;
1371 return false;
1372 }
1373
1374 return true;
1375 });
1376}
1377
1378// Returns true if library was found and false otherwise
1379static bool find_loaded_library_by_soname(android_namespace_t* ns,
1380 const char* name,
1381 bool search_linked_namespaces,
1382 soinfo** candidate) {
1383 *candidate = nullptr;
1384
1385 // Ignore filename with path.
1386 if (strchr(name, '/') != nullptr) {
1387 return false;
1388 }
1389
1390 bool found = find_loaded_library_by_soname(ns, name, candidate);
1391
1392 if (!found && search_linked_namespaces) {
1393 // if a library was not found - look into linked namespaces
1394 for (auto& link : ns->linked_namespaces()) {
1395 if (!link.is_accessible(name)) {
1396 continue;
1397 }
1398
1399 android_namespace_t* linked_ns = link.linked_namespace();
1400
1401 if (find_loaded_library_by_soname(linked_ns, name, candidate)) {
1402 return true;
1403 }
1404 }
1405 }
1406
1407 return found;
1408}
14091188static bool load_library(android_namespace_t* ns,
1189 LoadTask* task,
1190 LoadTaskList* load_tasks,
1191 int rtld_flags,
1192 const std::string& realpath,
1193 bool search_linked_namespaces) {
1194 off64_t file_offset = task->get_file_offset();
1195 const char* name = task->get_name();
1196 const android_dlextinfo* extinfo = task->get_extinfo();
1197
1198 if ((file_offset % PAGE_SIZE) != 0) {
1199 DL_ERR("file offset for the library \"%s\" is not page-aligned: %" PRId64, name, file_offset);
1200 return false;
1201 }
1202 if (file_offset < 0) {
1203 DL_ERR("file offset for the library \"%s\" is negative: %" PRId64, name, file_offset);
1204 return false;
1205 }
1206
1207 struct stat file_stat;
1208 if (TEMP_FAILURE_RETRY(fstat(task->get_fd(), &file_stat)) != 0) {
1209 DL_ERR("unable to stat file for the library \"%s\": %s", name, strerror(errno));
1210 return false;
1211 }
1212 if (file_offset >= file_stat.st_size) {
1213 DL_ERR("file offset for the library \"%s\" >= file size: %" PRId64 " >= %" PRId64,
1214 name, file_offset, file_stat.st_size);
1215 return false;
1216 }
1217
1218 // Check for symlink and other situations where
1219 // file can have different names, unless ANDROID_DLEXT_FORCE_LOAD is set
1220 if (extinfo == nullptr || (extinfo->flags & ANDROID_DLEXT_FORCE_LOAD) == 0) {
1221 soinfo* si = nullptr;
1222 if (find_loaded_library_by_inode(ns, file_stat, file_offset, search_linked_namespaces, &si)) {
1223 TRACE("library \"%s\" is already loaded under different name/path \"%s\" - "
1224 "will return existing soinfo", name, si->get_realpath());
1225 task->set_soinfo(si);
1226 return true;
1227 }
1228 }
1229
1230 if ((rtld_flags & RTLD_NOLOAD) != 0) {
1231 DL_ERR("library \"%s\" wasn't loaded and RTLD_NOLOAD prevented it", name);
1232 return false;
1233 }
1234
1235 struct statfs fs_stat;
1236 if (TEMP_FAILURE_RETRY(fstatfs(task->get_fd(), &fs_stat)) != 0) {
1237 DL_ERR("unable to fstatfs file for the library \"%s\": %s", name, strerror(errno));
1238 return false;
1239 }
1240
1241 // do not check accessibility using realpath if fd is located on tmpfs
1242 // this enables use of memfd_create() for apps
1243 if ((fs_stat.f_type != TMPFS_MAGIC) && (!ns->is_accessible(realpath))) {
1244 // TODO(dimitry): workaround for http://b/26394120 - the grey-list
1245
1246 // TODO(dimitry) before O release: add a namespace attribute to have this enabled
1247 // only for classloader-namespaces
1248 const soinfo* needed_by = task->is_dt_needed() ? task->get_needed_by() : nullptr;
1249 if (is_greylisted(ns, name, needed_by)) {
1250 // print warning only if needed by non-system library
1251 if (needed_by == nullptr || !is_system_library(needed_by->get_realpath())) {
1252 const soinfo* needed_or_dlopened_by = task->get_needed_by();
1253 const char* sopath = needed_or_dlopened_by == nullptr ? "(unknown)" :
1254 needed_or_dlopened_by->get_realpath();
1255 DL_WARN_documented_change(__ANDROID_API_N__,
1256 "private-api-enforced-for-api-level-24",
1257 "library \"%s\" (\"%s\") needed or dlopened by \"%s\" "
1258 "is not accessible by namespace \"%s\"",
1259 name, realpath.c_str(), sopath, ns->get_name());
1260 add_dlwarning(sopath, "unauthorized access to", name);
1261 }
1262 } else {
1263 // do not load libraries if they are not accessible for the specified namespace.
1264 const char* needed_or_dlopened_by = task->get_needed_by() == nullptr ?
1265 "(unknown)" :
1266 task->get_needed_by()->get_realpath();
1267
1268 DL_ERR("library \"%s\" needed or dlopened by \"%s\" is not accessible for the namespace \"%s\"",
1269 name, needed_or_dlopened_by, ns->get_name());
1270
1271 // do not print this if a library is in the list of shared libraries for linked namespaces
1272 if (!maybe_accessible_via_namespace_links(ns, name)) {
1273 PRINT("library \"%s\" (\"%s\") needed or dlopened by \"%s\" is not accessible for the"
1274 " namespace: [name=\"%s\", ld_library_paths=\"%s\", default_library_paths=\"%s\","
1275 " permitted_paths=\"%s\"]",
1276 name, realpath.c_str(),
1277 needed_or_dlopened_by,
1278 ns->get_name(),
1279 android::base::Join(ns->get_ld_library_paths(), ':').c_str(),
1280 android::base::Join(ns->get_default_library_paths(), ':').c_str(),
1281 android::base::Join(ns->get_permitted_paths(), ':').c_str());
1282 }
1283 return false;
1284 }
1285 }
1286
1287 soinfo* si = soinfo_alloc(ns, realpath.c_str(), &file_stat, file_offset, rtld_flags);
1288 if (si == nullptr) {
1289 return false;
1290 }
1291
1292 task->set_soinfo(si);
1293
1294 // Read the ELF header and some of the segments.
1295 if (!task->read(realpath.c_str(), file_stat.st_size)) {
1296 soinfo_free(si);
1297 task->set_soinfo(nullptr);
1298 return false;
1299 }
1300
1301 // find and set DT_RUNPATH and dt_soname
1302 // Note that these field values are temporary and are
1303 // going to be overwritten on soinfo::prelink_image
1304 // with values from PT_LOAD segments.
1305 const ElfReader& elf_reader = task->get_elf_reader();
1306 for (const ElfW(Dyn)* d = elf_reader.dynamic(); d->d_tag != DT_NULL; ++d) {
1307 if (d->d_tag == DT_RUNPATH) {
1308 si->set_dt_runpath(elf_reader.get_string(d->d_un.d_val));
1309 }
1310 if (d->d_tag == DT_SONAME) {
1311 si->set_soname(elf_reader.get_string(d->d_un.d_val));
1312 }
1313 }
1314
1315 for_each_dt_needed(task->get_elf_reader(), [&](const char* name) {
1316 load_tasks->push_back(LoadTask::create(name, si, ns, task->get_readers_map()));
1317 });
1318
1319 return true;
1320}
相关文章:

android so载入过程
源自android 9 看源代码的网页 /bionic/libdl/libdl_static.c 好像没用。都是空的 /bionic/libdl/libdl.cpp 主角 22// These functions are exported by the loader 23// TODO(dimitry): replace these with reference to libc.so101// Proxy calls to bionic loader 102_…...
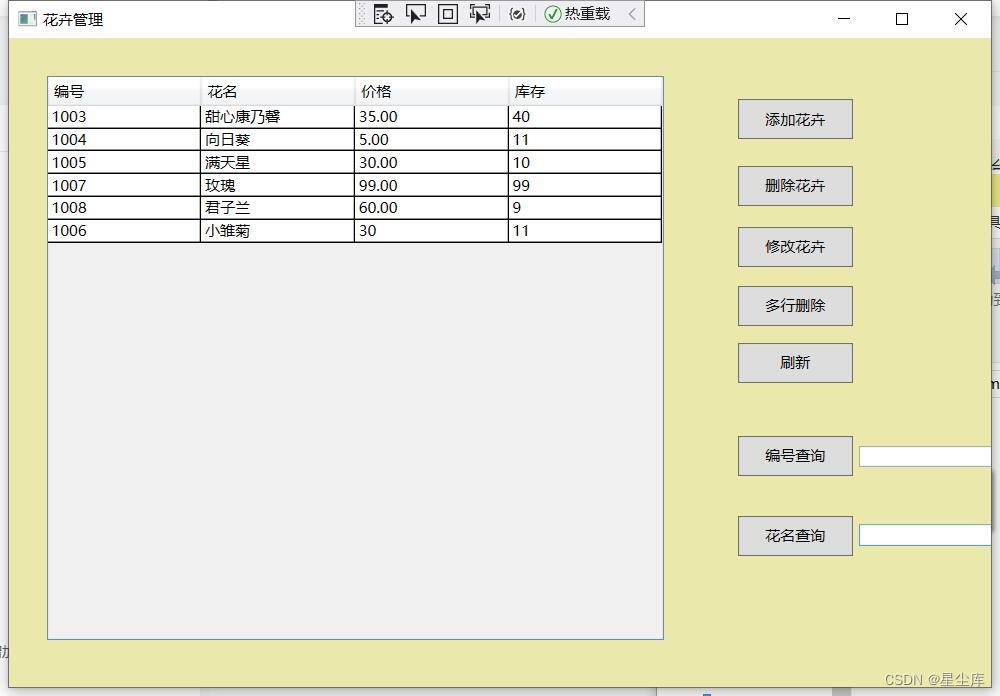
FlowerShop花店管理系统wpf+sqlserver
FlowerShop花店管理系统wpfsqlserver说明文档 运行前附加数据库.mdf(或sql生成数据库) 主要技术: 基于C#wpf架构和sql server数据库 功能模块: 顾客登录后可以查询花卉详情然后购买 店主登录管理后台 顾客管理 删除顾客多行删…...
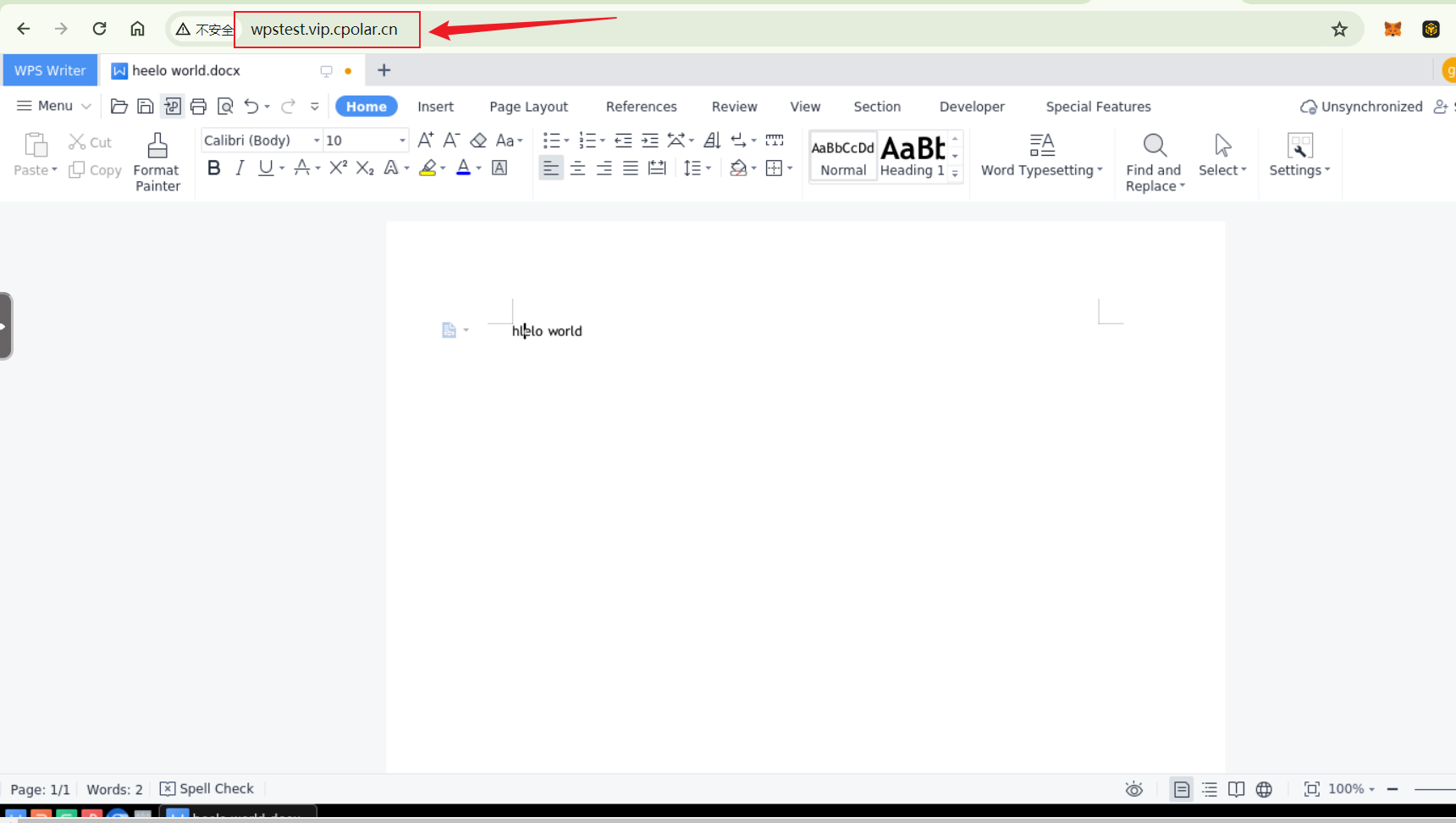
如何在群晖NAS部署WPS容器并实现无公网IP远程访问本地office软件
文章目录 1. 拉取WPS Office镜像2. 运行WPS Office镜像容器3. 本地访问WPS Office4. 群晖安装Cpolar5. 配置WPS Office远程地址6. 远程访问WPS Office小结 7. 固定公网地址 wps-office是一个在Linux服务器上部署WPS Office的镜像。它基于WPS Office的Linux版本,通过…...

【C语言程序设计】C语言求圆周率π(三种方法)
题目一: 利用公式①计求π的近似值,要求累加到最后一项小于10^(-6)为止。 程序代码: #include <stdio.h> #include <stdlib.h> #include <math.h> int main(){float s1;float pi0;float i1.0;float n1.0;while(fabs(i)&…...

常见的特殊端口号及其用途
21端口:FTP(文件传输协议)服务端口。FTP允许用户进行文件传输,如上传和下载文件。22端口:SSH(安全外壳协议)服务端口。SSH用于远程登录到服务器,并提供加密的数据传输。23端口&#…...
 安装kotlin)
Linux(ubuntu) 安装kotlin
Kotlin 是一种基于 Java 语言的静态类型编程语言,它可以运行于 JVM 上 1. 安装 Java Development Kit (JDK) Kotlin 运行于 JVM 上,所以首先需要安装 Java Development Kit(JDK) Ubuntu 或 Debian 系统 sudo apt update sudo a…...

微信小程序提交成功设置提示
在微信小程序中,当用户成功提交表单或完成某项操作后,通常我们会设置一个提示来告知用户操作已完成。这种提示通常可以通过几种方式来实现,例如使用 wx.showToast 方法显示一个短暂的提示消息,或者跳转到一个新的页面并显示成功信…...
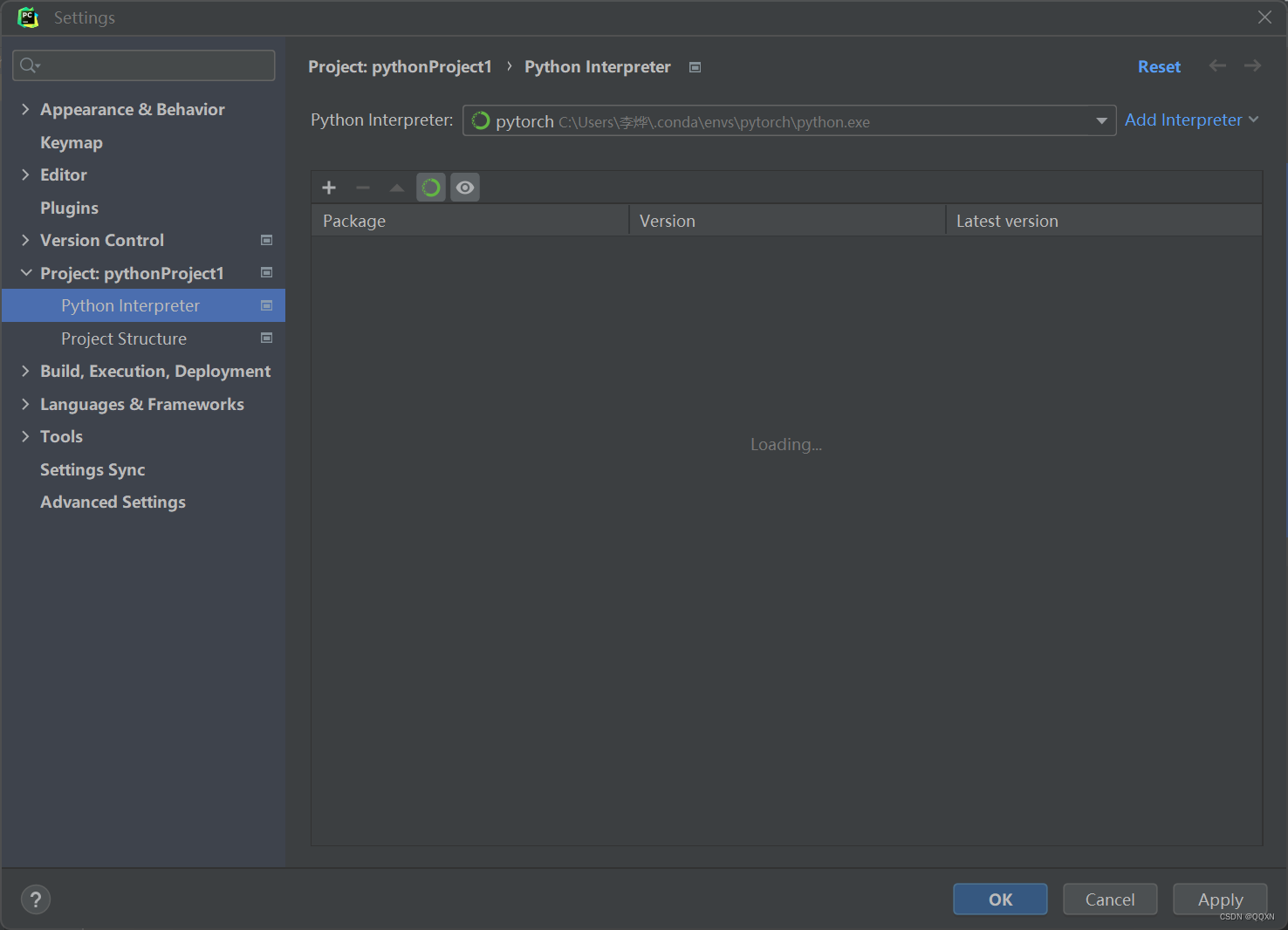
Pycharm与Anaconda安装
网址: Pycharm:https://www.jetbrains.com/pycharm/ Anaconda:https://www.anaconda.com/download/ 官网下载速度太慢可以选择到清华源下载:https://repo.anaconda.com/archive/ 一:Anaconda安装 安装: …...
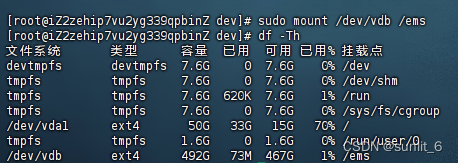
阿里云数据盘挂载目录
1、先登录服务器创建新目录aaa 2、云盘都快照备份下。后续操作完核实无误了,您根据您需求删除快照就行, 然后登录服务器内执行: fdisk -l lsblk blkid ll /aaa 3、执行:(以下命令是进行数据盘做ext4文件系统并挂载到…...

【Python】探索PyPinyin 库:Python 中的中文拼音转换工具
花未全开月未圆, 半山微醉尽余欢。 何须多虑盈亏事, 终是小满胜万全。 —— 《对抗路—吕布》 PyPinyin 是一个功能强大的 Python 库,用于将中文文本转换为拼音。它提供了丰富的功能,能够满足各种中文文本处理的需求。在本文中&am…...

Linux运维总结:Centos7.6之OpenSSH7.4升级版本至9.3
一、环境信息 操作系统:Centos7.6.1810 OpenSSH_7.4p1, OpenSSL 1.0.2k-fips 注意:升级后由于加密算法的区别,低版本的SSH工具可能无法连接,建议改用Xshell7或SecureCRT9.0以上版本。 二、注意事项 1、 检查防火墙或selinux是否…...

SD-WAN能解决企业网络的哪些问题?
SD-WAN技术的崛起为企业网络带来了全新的解决方案。在数字化转型、云计算、远程办公和5G等领域,SD-WAN技术展现出强劲的市场趋势。那么,SD-WAN究竟能够解决企业网络中的哪些难题呢? 提升网络带宽利用率 传统网络在连接分支机构时,…...

Python实战:Python集合的常见操作
Python集合(set)是一种无序且元素唯一的容器,它是Python中一种基本的数据结构。本文将详细介绍Python集合的常见操作,包括创建集合、添加和删除元素、集合运算、集合推导式等。 1. 创建集合 Python集合可以通过多种方式创建&…...

Linux: cloud: network: tap tx 丢包一例,vCPU的运行受到主机CPU的占用影响
https://access.redhat.com/documentation/en-us/red_hat_openstack_platform/10/html/ovs-dpdk_end_to_end_troubleshooting_guide/high_packet_loss_in_the_tx_queue_of_the_instance_s_tap_interface 这个里面有一个丢包的例子是说,如果tx-queue的大小不够大&am…...

揭秘数据之美:利用 Bokeh 轻松构建实时、动态的数据可视化项目
1、引言 想让你的数据跃然 “屏” 上?厌倦了静态图表的平淡无奇?那么,今天就让我们一起探索 Python 世界中的瑰宝 ——Bokeh 库。这款强大的可视化工具以其流畅的交互性和实时更新能力,让你的数据呈现如电影般生动立体࿰…...

性能测试场景分析并设计?超细案例讲解
前言 性能测试场景,其实和功能测试没什么区别,只是侧重点不同。 我们在功能测试中经常用到的等价类边界值等分析和设计测试case的方法,目的是为了尽可能的覆盖业务场景,避免遗漏导致的功能逻辑缺失或者未达到预期。 而在性能测试…...

python面向对象练习一
假设我们正在开发一个学生管理系统,我们需要创建一个Student类来表示学生对象。 每个学生都有学号、姓名和年龄属性。我们还希望能够打印学生的信息,并在删除学生对象时输出一条提示消息。 要求使用__str__()管理学生信息的打印 要求使用__del__()管理删…...

【Linux-tar/gzip/zip】
Linux-tar/gzip/zip ■ tar■ gzip■ zip■ unzip解压缩 ■ tar 基本语法: tar [选项] 压缩后的压缩包 要压缩的文件 选项说明描述-cf :对文件或文件夹进行打包-v :显示压缩的进度- z :使用gzip压缩工具把打包后的文件进行压缩为.gz-j :使用bzip2压缩工具把打包后…...
第一代高通S7和S7 Pro音频平台:超旗舰性能,全面革新音频体验
以下文章来源于高通中国 如今,音频内容与形式日渐丰富,可满足人们放松心情、提升自我、获取资讯等需求。得益于手机、手表、耳机、车载音箱等智能设备的广泛应用,音频内容可以更快速触达用户。从《音频产品使用现状调研报告2023》中发现&…...
el-menu + el-badge 菜单加红点标识el-badge
el-menu el-badge 菜单加红点标识el-badge 一、el-menu组件menu/index.vuemenu/submenu.vue 二、获取/更新菜单红点标识 main.js引入全局组件/mixins全局混入 el-menu封装 一、el-menu组件 menu/index.vue 重点:定义 ref"menu",切换路由时…...

AI赋能5G核心网故障诊断:从PCAP解析到智能根因分析的工程实践
1. 项目概述:当AI遇见5G核心网故障诊断在5G核心网的运维与测试一线干了这么多年,最头疼的莫过于面对海量的PCAP抓包文件。一个复杂的信令流程下来,动辄几千甚至上万个数据包,工程师需要像侦探一样,逐帧审视协议交互&am…...
)
Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析)
更多请点击: https://intelliparadigm.com 第一章:Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析) 自2024年V6.2版本起,大量用户反馈 --stylize 与 --sharp 参数组合下图像边缘锐化效果显著弱化&am…...

Hindsight测试策略:单元测试、集成测试和端到端测试
Hindsight测试策略:单元测试、集成测试和端到端测试 【免费下载链接】hindsight Hindsight: Agent Memory That Learns 项目地址: https://gitcode.com/GitHub_Trending/hindsight2/hindsight Hindsight作为一款专注于Agent Memory的开源项目,其可…...

JWT弱密钥爆破实战:从HS256签名原理到CTF权限提升
1. 这不是密码学考试,而是一场“密钥猜谜”实战JWT(JSON Web Token)在现代Web系统中早已不是可选项,而是默认配置。登录成功后返回一串形如eyJhbGciOiJIUzI1NiIsInR5cCI6IkpXVCJ9.eyJ1c2VyX2lkIjoxMjMsIm5hbWUiOiLnlKjliYkiLCJpYX…...

Hermes Agent 框架如何对接 Taotoken 作为自定义模型供应商并配置环境变量
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Hermes Agent 框架如何对接 Taotoken 作为自定义模型供应商并配置环境变量 Hermes Agent 是一个流行的 AI 代理开发框架࿰…...

量子机器学习与傅里叶分析:革新期权定价的混合计算范式
1. 项目概述:当量子机器学习遇见金融定价在金融工程的核心地带,期权定价一直是个计算密集型的硬骨头。传统的蒙特卡洛模拟虽然通用,但为了达到足够的精度,动辄需要百万甚至千万次的路径模拟,计算成本高昂。近年来&…...

从脚本到系统:设计一个支持插件、限流、重试与监控的 Python 异步爬虫框架
从脚本到系统:设计一个支持插件、限流、重试与监控的 Python 异步爬虫框架 很多人第一次写 Python 爬虫,都是从几十行脚本开始的:requests.get()、BeautifulSoup、for 循环、保存 CSV。它很快,也很有成就感。但真实项目往往不是“…...

MNE-Python 第9天学习笔记:源定位基础
一、什么是源定位? 1.1 通俗理解 到目前为止,我们分析的是"头皮上的脑电":头皮电极 → 记录头皮表面的电位↓这就像在地球表面测量地震波我们想知道的是:震源在哪里?多深?源定位 从头皮电位反推…...

MFCC与可解释机器学习:构建可解释的L2发音AI诊断系统
1. 项目概述:当语音技术遇见二语教学 作为一名在语音技术和教育技术交叉领域摸爬滚打了十多年的从业者,我常常思考一个问题:我们能用算法“听”出一个人说外语时,他的母语口音吗?更进一步,我们能否不仅“听…...

如何快速上手SoundMind:10分钟完成音频逻辑推理模型训练
如何快速上手SoundMind:10分钟完成音频逻辑推理模型训练 【免费下载链接】SoundMind We introduce the Audio Logical Reasoning (ALR) dataset, consisting of 6,446 text-audio annotated samples specifically designed for complex reasoning tasks. Building o…...