【学习总结】ORBSLAM3使用自己相机数据
本文仅用于自己学习总结。本文档记录如何修改ORBSLAM3的接口,用自己的图片和数据。
单目视觉,无IMU,离线数据运行的配置过程
euroc_examples.sh
首先从euroc_examples.sh这个运行指令改。这个文件在最新版的代码中被删掉了,但通过翻commit的版本,这个文件应该是这个样子:
pathDatasetEuroc='/home/larrydong/codeGit/ORB_SLAM3_larrydong/data' #Example, it is necesary to change it by the dataset path
#------------------------------------
# Monocular Examples
echo "Launching MH01 with Monocular sensor"
./Examples/Monocular/mono_euroc \./Vocabulary/ORBvoc.txt \./Examples/Monocular/EuRoC.yaml \"$pathDatasetEuroc"/MH01 \./Examples/Monocular/EuRoC_TimeStamps/MH01.txt \dataset-MH01_mono
即运行了mono_euroc程序,输入参数有5个:词袋文件、配置文件、图片数据路径、时间戳文件、输出路径。接下来一个个改。
mono_euroc.cc
从这个文件可以看出,对于单目非IMU的读取,首先是根据一个时间戳文件读取图片:时间戳文件的每一行就是图片路径下每个图片的文件名。因此自己采集的数据需要导出时间戳和图像。
为此写了个简单的代码,将rosbag数据中的图像导出到图片和时间戳文件:
https://github.com/LarryDong/usb_cam_utils/tree/main/image_writer
这里有一个坑,我如果存成.png格式图像,运行时无法初始化。后面存成.bmp格式则正常很多。怀疑是png格式压缩比较离谱?所以后面一律用bmp格式,需要修改对应LoadImages函数里面的加载。
同时代码默认是没有开启可视化的,需要将SLAM系统的false选项设置为true
// ORB_SLAM3::System SLAM(argv[1],argv[2],ORB_SLAM3::System::MONOCULAR, false);
ORB_SLAM3::System SLAM(argv[1],argv[2],ORB_SLAM3::System::MONOCULAR, true);
对这个文件做完必要的修改后,就是在CMakeLists.txt中增加编译。
CMakeLists.txt
初看这个CMakeLists.txt并编译,没有找到编译后输出的可执行程序在哪里,即euroc_examples.sh的第一行:./Examples/Monocular/mono_euroc。后来发现,在CMakeLists中有一行Set设定了输出路径。这里我进行修改,将输出路径CMAKE_RUNTIME_OUTPUT_DIRECTORY设定为$Project/Apps/build路径,同时增加对应的cpp文件usb_cam.cc:
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Apps/build)
add_executable(my_ownApps/src/usb_cam.cc
)
target_link_libraries(my_own ${PROJECT_NAME})
camera.yaml
这里修改相机和SLAM的配置文件,首先对相机进行标定获得内参,然后修改对应参数。这里遇到一个坑,p1和p2参数需要设置为0.0,设置为0时运行会报错找不到p1参数。由于是离线模式,fps等参数实际没有用到。
File.version: "1.0"
Camera.type: "PinHole"
Camera1.fx: 1042.7
Camera1.fy: 1044.3
Camera1.cx: 948.5
Camera1.cy: 488.9Camera1.k1: 0.0055
Camera1.k2: 0.0129
Camera1.p1: 0.0 # 设置为0时运行报错 Camera1.p1 是空,所以改成了0.0
Camera1.p2: 0.0Camera.width: 1920
Camera.height: 1080
Camera.newWidth: 1920
Camera.newHeight: 1080
# Camera frames per second
Camera.fps: 20
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
TODO:
IMU和在线运行的配置后面再写吧。
相关文章:

【学习总结】ORBSLAM3使用自己相机数据
本文仅用于自己学习总结。本文档记录如何修改ORBSLAM3的接口,用自己的图片和数据。 单目视觉,无IMU,离线数据运行的配置过程 euroc_examples.sh 首先从euroc_examples.sh这个运行指令改。这个文件在最新版的代码中被删掉了,但通…...
C++单例模式实现
目录 1.提出的需求 2.如何定义一个类,使得这个类最多只能创建一个对象? 3.代码 4.小结 C/CLinux服务器开发/后台架构师【零声教育】-学习视频教程-腾讯课堂 1.提出的需求 在架构设计时&am…...
343. 整数拆分
343. 整数拆分 给定一个正整数 n ,将其拆分为 k 个 正整数 的和( k > 2 ),并使这些整数的乘积最大化。 返回 你可以获得的最大乘积 。 示例 1: 输入: n 2 输出: 1 解释: 2 1 1, 1 1 1。示例 2: 输入: n 10 输出: 36…...
SCAFFOLD: Stochastic Controlled Averaging for Federated Learning学习
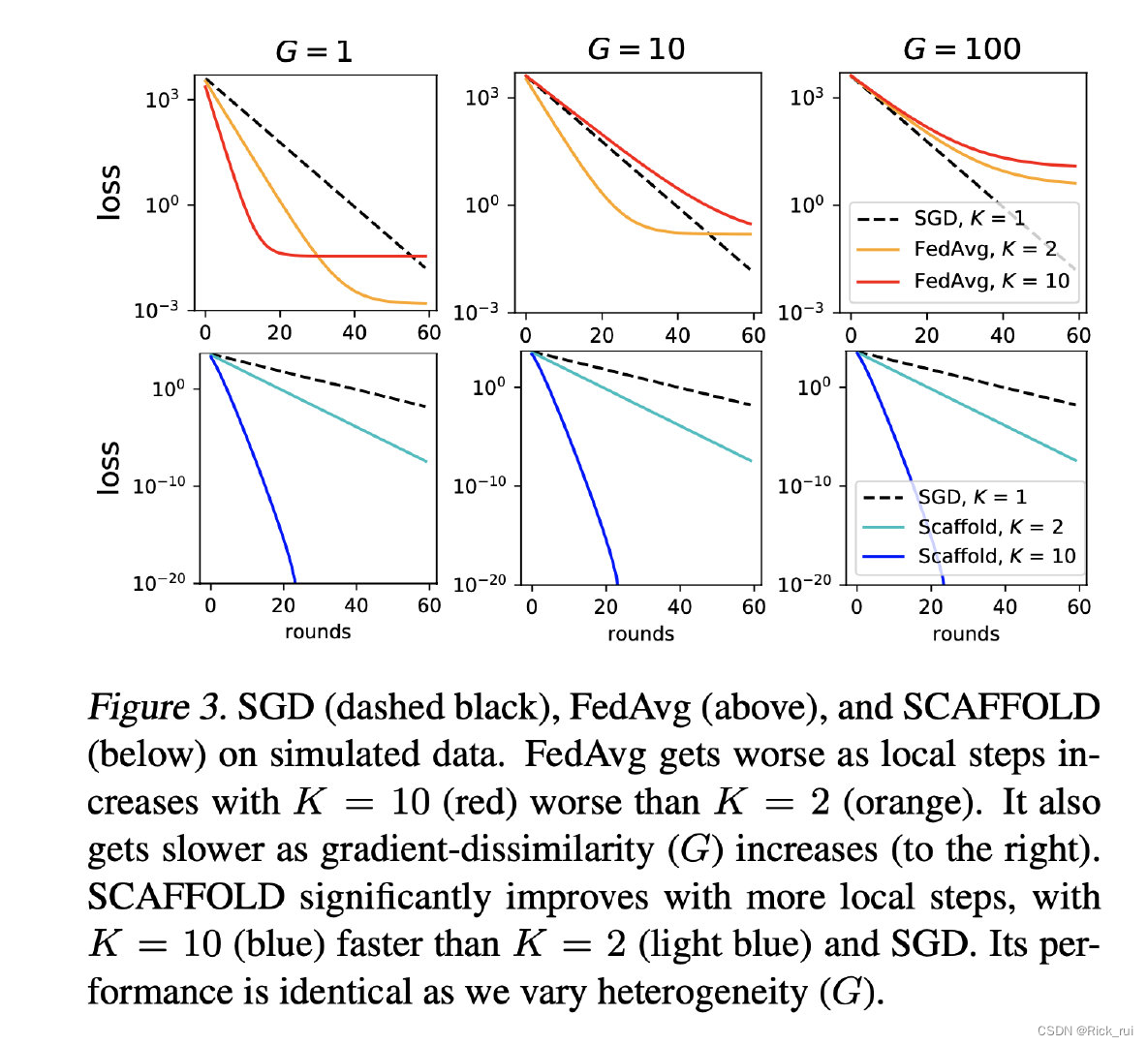
SCAFFOLD: Stochastic Controlled Averaging for Federated Learning学习背景贡献论文思想算法局部更新方式全局更新方式实验总结背景 传统的联邦学习在数据异构(non-iid)的场景中很容易产生“客户漂移”(client-drift )的现象,这会导致系统的收敛不稳定或者缓慢。…...
第十四届蓝桥杯三月真题刷题训练——第 3 天
目录 题目1:门牌制作 题目描述 运行限制 代码: 题目2:货物摆放_long 题目描述 答案提交 运行限制 代码: 题目3:跳跃_dp 题目描述 输入描述 输出描述 输入输出样例 运行限制 代码: 题目4&a…...

变量的四大存储类型static extern auto register
变量的四大存储类型static extern auto register外部变量(全局变量)extern----全局静态存储区定义 引用性声明❗易错点:函数之外未定义的变量一般是外部变量 extern全局变量 与 局部变量的区别‼️ 谨记:声明可以多次,…...
JavaScript基础五、语句
零、文章目录 文章地址 个人博客-CSDN地址:https://blog.csdn.net/liyou123456789个人博客-GiteePages:https://bluecusliyou.gitee.io/techlearn 代码仓库地址 Gitee:https://gitee.com/bluecusliyou/TechLearnGithub:https:…...

青龙面板399乐园
1.拉库 ql raw https://wjkjy.cn/wp-content/uploads/2023/03/1678104978-afaecb98a9df61e.js 2.抓包 7.26 399乐园 每天 七八毛左右 脚本已完成全部任务,自动提现 下载链接:https://3mao.lanzoul.com/izGDh084oogh 抓包链接 https://339.mhhuanyue.c…...

自动化注册组件
// components/index.js export default { install(app) { const req require.context(‘./’, false, /.vue$/) // console.log(req, ‘req’) req.keys().forEach((item) > { // console.log(item, ‘item’) const com req(item).default // console.log(com, ‘com’)…...

【JS代码优化一】分支优化篇
序:如何让代码看起来更优雅?代码是由文字堆叠起来的可以被机器执行的程序。它记载着相关信息(状态)、表达相关的情绪(函数),所以如何能够写出简洁、优雅、健壮、可维护性强的程序至关重要。本系…...

软件测试-接口测试-补充
文章目录 1.持续集成2. mock测试3.Fiddler 抓包工具3.1 弱网测试4. webservice1.持续集成 持续集成概念 重复执行开发提交代码并集成到主干; aim 加速产品迭代 好处 快速发现问题 避免分支大幅度偏离主干 加速产品发布 工具 git:源代码版本工具github:代码仓库jenkins:持续…...
:Beans自动装配)
Spring笔记(5):Beans自动装配
为什么需要使用自动装配 在通过XML配置文件进行设置Bean元素注入与声明注册后,我们能够发现一个问题,在项目中是会存在大量对象的,不可能全部都写在XML文件中,那会显得非常的臃肿,不利于后期维护,所以需要用…...

Spark+Vue+Springboot 协同过滤额音乐推荐大数据深度学习项目
一、项目背景 随着互联网的发展,大数据的到来,传统的音乐行业受到了很大的冲击,原有的音乐数字化给人们生活带来了极大的便利。随着数字音乐的兴起,各大音乐平台层出不穷,人们在音乐平台上收听音乐的时,常常因为歌曲信息繁杂,而不能找到自己想听的音乐。为了解决这个问题,音乐…...
JDBC的实现(IDEA版)
前期准备 开发环境: IDEA 2021.1.3 JAVA 1.8 MYSQL 8.0.32 msql用户名:root 密码:123 下载MySQL JDBC 驱动 前往MySQL官网下载对应版本的MySQL Connector/J驱动 (下载地址:https://dev.mysql.com/downloads/connector/j/ÿ…...
人员摔倒识别预警系统 人员跌倒检测算法 yolov7
人员摔倒识别预警系统 人员跌倒检测算法基于yolov7网络模型计算机识别技术,人员摔倒识别预警系统 人员跌倒检测算法对画面中人员摔倒进行实时检测识别抓拍告警。YOLOv7 的策略是使用组卷积来扩展计算块的通道和基数。研究者将对计算层的所有计算块应用相同的组参数和…...
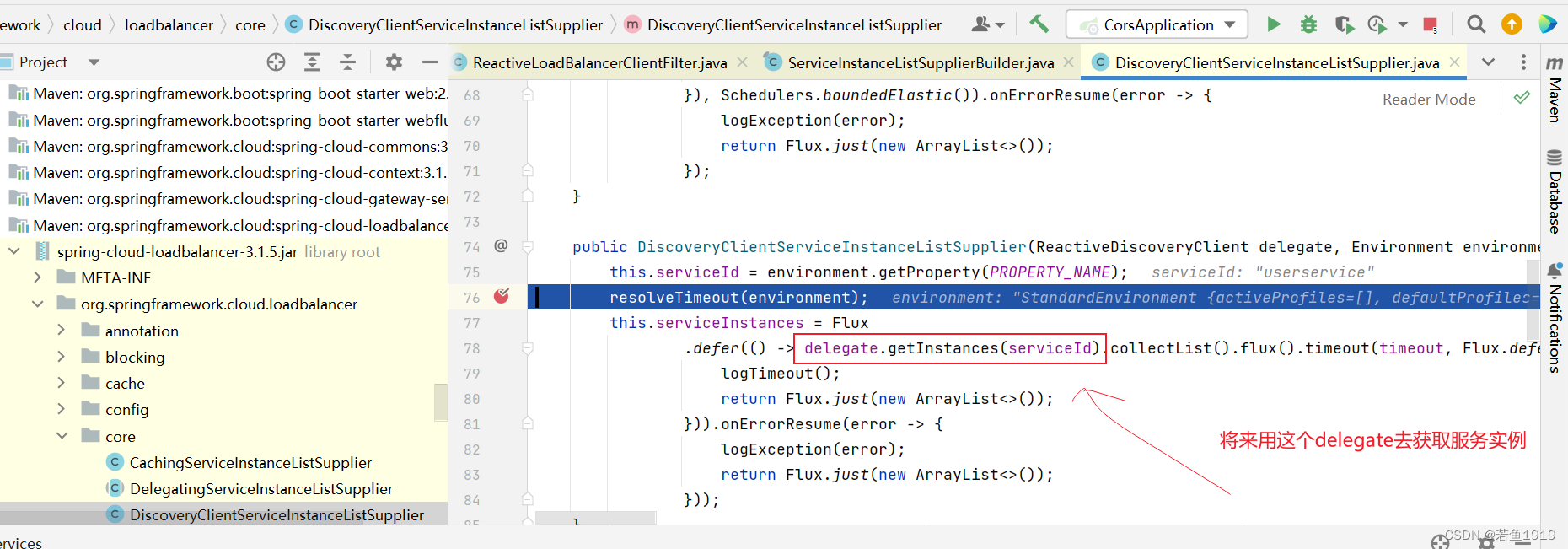
Spring-Cloud-Gateway集成Nacos如何做负载均衡?
spring-cloud-alibaba的低版本 如果所用的SpringCloud和Nacos的版本信息如下: <spring-cloud.version>Hoxton.SR10</spring-cloud.version> <spring-cloud-alibaba.version>2.2.6.RELEASE</spring-cloud-alibaba.version>网关的依赖如下&…...

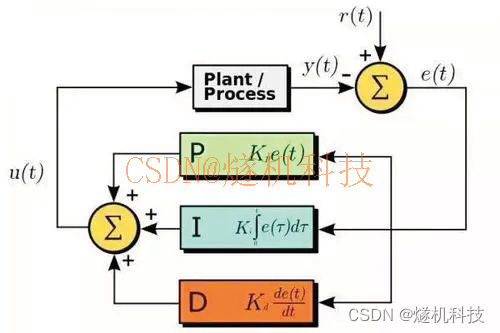
【数据挖掘与商务智能决策】第四章 逻辑回归模型
逻辑回归模型算法原理 逻辑回归模型的数学原理 %matplotlib inline# 补充知识点:Sigmoid函数绘制 import matplotlib.pyplot as plt import numpy as npx = np.linspace(-6, 6) # 通过linspace()函数生成-6到6的等差数列,默认50个数 y = 1.0...

滚动升级回滚
滚动升级回滚 ReplicationController 资源文件 apiVersion: v1 kind: ReplicationController metadata:name: kubia-v1labels:app: kubia spec:replicas: 3template:metadata:name: kubialabels:app: kubiaspec:containers:- image: luksa/kubia:v1name: nodejes --- apiVer…...
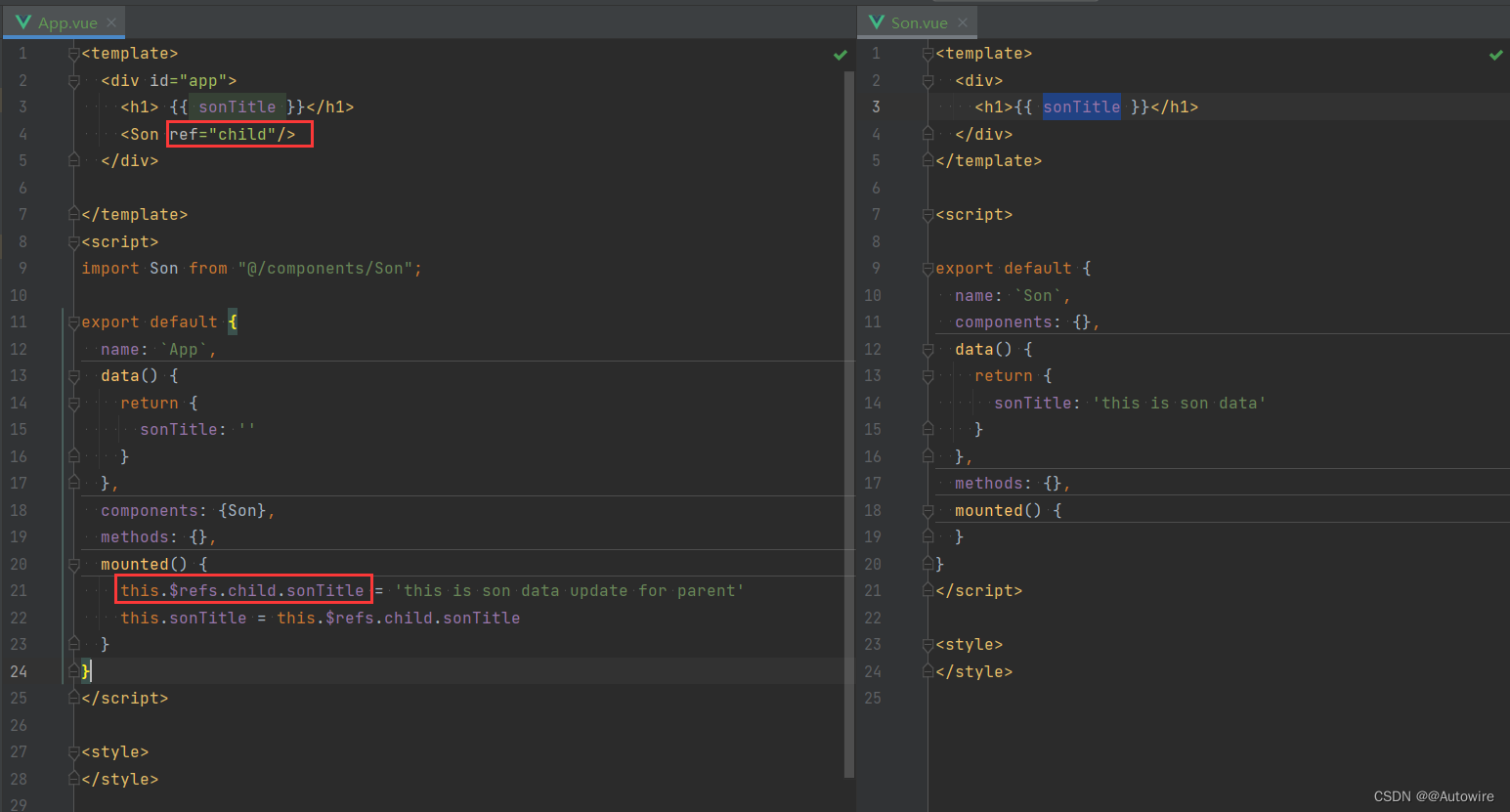
2023/3/6 VUE - 组件传值【通信】方式
1 父亲传子代传值【子代使用父代的数据】 1.1 props传值 父亲给儿子传值: 爷爷给孙子传值: 这个props传值的方式,只能一代一代的往下传,不能跨代传值。 有一个问题:子组件不能修改父组件的值: 1.2 …...
MedCalc v20.217 医学ROC曲线统计分析参考软件
MedCalc是一款医学 ROC 曲线统计软件,用于ROC曲线分析的参考软件,医学工作者设计的医学计算器,功能齐全。它可以帮助医生快速作出普通的医学计算,从而对症下药。提供超过76种常用的规则和方法,包括:病人数据、单位参数、费用计算等等。甚至可以将图形另存为BMP,PNG,GIF…...

STM32 HAL库实战:用CD74HC4067扩展16路模拟输入,附多路复用防干扰代码
STM32 HAL库实战:用CD74HC4067扩展16路模拟输入,附多路复用防干扰代码 在嵌入式开发中,资源有限的微控制器常常面临模拟输入通道不足的问题。以STM32F103C8T6为例,虽然性能强大,但ADC通道数量有限,难以满足…...

基于大语言模型的强化学习奖励函数自动生成:text2reward项目实践指南
1. 项目概述:从文本指令到强化学习奖励的桥梁最近在折腾强化学习项目时,一个老问题又冒出来了:怎么设计一个既精确又高效的奖励函数?传统方法要么是工程师凭经验手写一堆规则,复杂场景下容易顾此失彼;要么依…...

零依赖STL转STEP工具:5分钟实现3D格式无缝转换的完整指南
零依赖STL转STEP工具:5分钟实现3D格式无缝转换的完整指南 【免费下载链接】stltostp Convert stl files to STEP brep files 项目地址: https://gitcode.com/gh_mirrors/st/stltostp 在数字化制造和工程设计的交叉领域,STL到STEP格式转换已成为连…...

FontForge入门指南:从零开始设计你的第一套字体
FontForge入门指南:从零开始设计你的第一套字体 【免费下载链接】fontforge Free (libre) font editor for Windows, Mac OS X and GNULinux 项目地址: https://gitcode.com/gh_mirrors/fo/fontforge 你是否曾想过亲手设计一套属于自己的字体?Fon…...

Postal邮件服务器与AI助手集成:MCP协议实现与安全实践
1. 项目概述:一个连接Postal与MCP的桥梁最近在折腾一些自动化工作流和智能体应用时,遇到了一个挺有意思的需求:如何让我那些基于Claude或GPT的AI助手,能够直接、安全地访问和操作我自建的邮件服务器数据?比如查询特定邮…...
)
内网开发环境救星:保姆级教程搞定Docker与Docker Compose离线安装(附避坑清单)
内网开发环境救星:保姆级教程搞定Docker与Docker Compose离线安装(附避坑清单) 在企业级开发环境中,内网隔离是常见的安全策略,但这也给技术栈的部署带来了挑战。想象一下,当你需要在完全离线的环境中搭建一…...

Taotoken 的 Token Plan 套餐如何帮助个人开发者控制预算
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken 的 Token Plan 套餐如何帮助个人开发者控制预算 对于个人开发者或小型工作室而言,在探索和集成大模型能力时&…...

NotebookLM如何3分钟解析薛定谔方程?——物理学者私藏的7个Prompt工程技巧曝光
更多请点击: https://intelliparadigm.com 第一章:NotebookLM物理学研究辅助 NotebookLM 是 Google 推出的基于 LLM 的研究型笔记工具,专为学者与科研人员设计。在物理学研究中,它可高效整合 PDF 论文、实验日志、LaTeX 公式片段…...

ComfyUI-Manager插件不显示问题终极指南:从原理到实战的完整解决方案
ComfyUI-Manager插件不显示问题终极指南:从原理到实战的完整解决方案 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable…...
如何用TranslucentTB实现Windows任务栏透明化:完整配置指南与性能优化
如何用TranslucentTB实现Windows任务栏透明化:完整配置指南与性能优化 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/TranslucentTB Window…...