AIGC笔记--Maya提取和修改FBX动作文件
目录
1--Maya数据解析
2--FBX SDK导出6D数据
3--6D数据映射和Maya可视化
完整项目代码:Data-Processing/FBX_SDK_Maya
1--Maya数据解析
在软件Maya中直接拖入FBX文件,可以播放和查看人体各个骨骼关节点的数据:
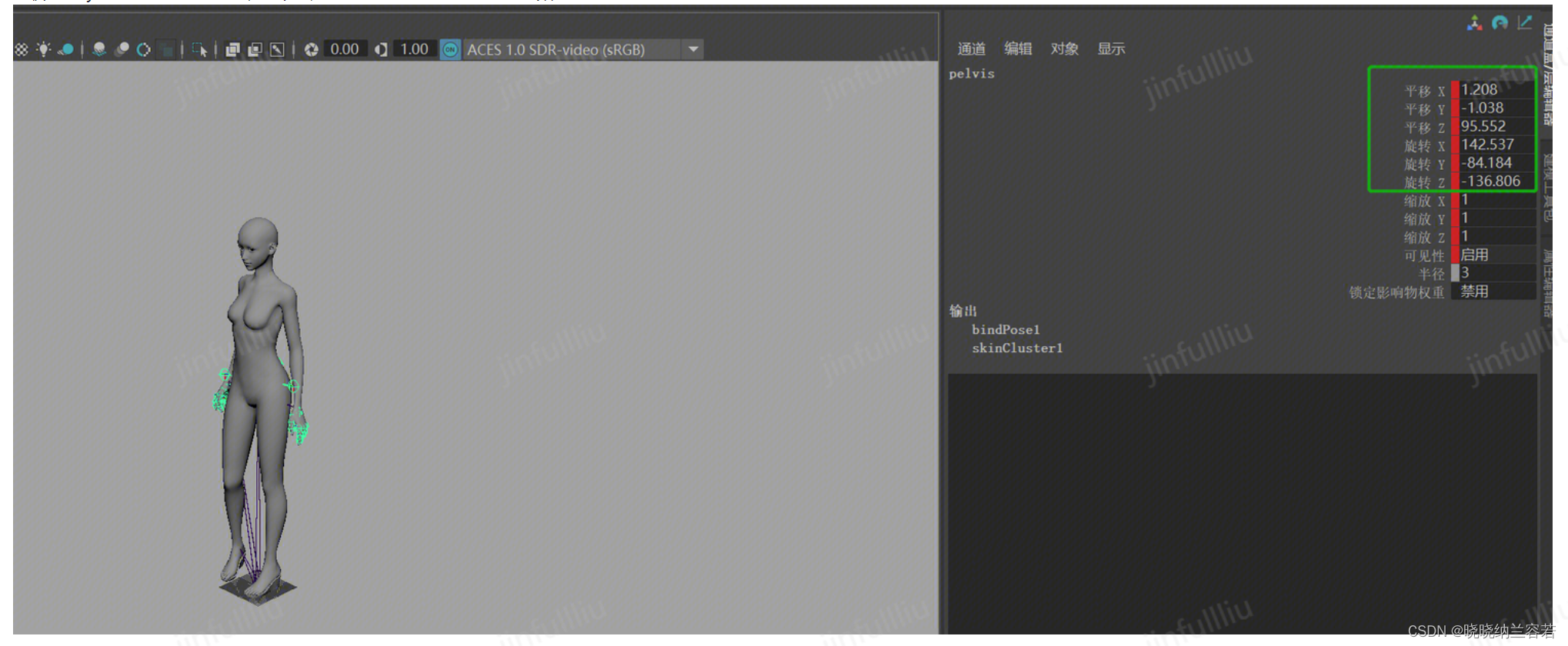
对于上图来说,平移X、平移Y和平移Z表示关节点的Local Transaction的坐标,而旋转X、旋转Y、旋转Z表示关节点的Euler Rotation坐标;对于一个固定的人体模型,修改每一帧中各个关节点的上述六个坐标,即可改变人体表现的动作;
在Maya中,可以通过以下脚本在Python编辑器(窗口→常规编辑器→脚本编辑器)中打印所有帧所有关节的上述6D坐标数据:
'''
@File : print_joint_6Ddata_maya.py
@Time : 2024/03/07 20:05:00
@Author : Jinfu Liu
@Version : 1.0
@Desc : print 6D data of joint in FBX file
'''import maya.cmds as cmdsjoint_names = ["root", "pelvis", "spine_00", "spine_01", "spine_02", "spine_03", "clavicle_l", "upperarm_l", "lowerarm_l", "hand_l", "index_01_l","index_02_l", "index_03_l", "middle_01_l", "middle_02_l", "middle_03_l", "pinky_01_l", "pinky_02_l", "pinky_03_l", "ring_01_l", "ring_02_l","ring_03_l", "thumb_01_l", "thumb_02_l", "thumb_03_l", "Slot_hand_L_bone", "clavicle_r", "upperarm_r", "lowerarm_r", "hand_r", "index_01_r","index_02_r", "index_03_r", "middle_01_r", "middle_02_r", "middle_03_r", "pinky_01_r", "pinky_02_r", "pinky_03_r", "ring_01_r", "ring_02_r","ring_03_r", "thumb_01_r", "thumb_02_r", "thumb_03_r", "Slot_hand_R_bone", "Slot_spine_bone", "neck_01", "head", "thigh_l", "calf_l","foot_l", "ball_l", "thigh_r", "calf_r", "foot_r", "ball_r", "Slot_waist_L_bone", "Slot_waist_R_bone", "Slot_pelvis_bone", "ik_foot_root", "ik_foot_l","ik_foot_r", "ik_hand_root", "ik_hand_gun", "ik_hand_l", "ik_hand_r"]for joint in joint_names:obj = cmds.ls(joint)print("process ", obj)keyframes = cmds.keyframe(obj, query=True)for frame in keyframes:local_trans_X = cmds.getAttr(joint + ".translateX", time = frame)local_trans_Y = cmds.getAttr(joint + ".translateY", time = frame)local_trans_Z = cmds.getAttr(joint + ".translateZ", time = frame)local_rotate_X = cmds.getAttr(joint + ".rotateX", time = frame)local_rotate_Y = cmds.getAttr(joint + ".rotateY", time = frame)local_rotate_Z = cmds.getAttr(joint + ".rotateZ", time = frame)print(local_trans_X, local_trans_Y, local_trans_Z)print(local_rotate_X, local_rotate_Y, local_rotate_Z)2--FBX SDK导出6D数据
通过Python FBX SDK,我们可以提取和保存在一个原始FBX文件中对应于Maya可视化的6D坐标,具体的脚本如下:FBX_SDK_Maya/Extract_local_TR.py
3--6D数据映射和Maya可视化
通过第2步的脚本可以提取人体运动的关键6D坐标数据,这些6D坐标数据可以进行一些动作生成任务,生成相同意义的坐标数据。原始6D或生成的6D坐标数据可以使用以下脚本,并在Maya中进行可视化:
'''
@File : set_joint_6Ddata_maya.py
@Time : 2024/03/07 20:10:00
@Author : Jinfu Liu
@Version : 1.0
@Desc : set 6D data of joint in FBX file
'''# you must install numpy by: mayapy.exe -m pip install numpy
import numpy as np
import maya.cmds as cmdsJoint_to_idx = {"root": 0,"pelvis": 1,"spine_00": 2,"spine_01": 3,"spine_02": 4,"spine_03": 5,"clavicle_l": 6,"upperarm_l": 7,"lowerarm_l": 8,"hand_l": 9,"index_01_l": 10,"index_02_l": 11,"index_03_l": 12,"middle_01_l": 13,"middle_02_l": 14,"middle_03_l": 15,"pinky_01_l": 16,"pinky_02_l": 17,"pinky_03_l": 18,"ring_01_l": 19,"ring_02_l": 20,"ring_03_l": 21,"thumb_01_l": 22,"thumb_02_l": 23,"thumb_03_l": 24,"Slot_hand_L_bone": 25,"clavicle_r": 26,"upperarm_r": 27,"lowerarm_r": 28,"hand_r": 29,"index_01_r": 30,"index_02_r": 31,"index_03_r": 32,"middle_01_r": 33,"middle_02_r": 34,"middle_03_r": 35,"pinky_01_r": 36,"pinky_02_r": 37,"pinky_03_r": 38,"ring_01_r": 39,"ring_02_r": 40,"ring_03_r": 41,"thumb_01_r": 42,"thumb_02_r": 43,"thumb_03_r": 44,"Slot_hand_R_bone": 45,"Slot_spine_bone": 46,"neck_01": 47,"head": 48,"thigh_l": 49,"calf_l": 50,"foot_l": 51,"ball_l": 52,"thigh_r": 53,"calf_r": 54,"foot_r": 55,"ball_r": 56,"Slot_waist_L_bone": 57,"Slot_waist_R_bone": 58,"Slot_pelvis_bone": 59,"ik_foot_root": 60,"ik_foot_l": 61,"ik_foot_r": 62,"ik_hand_root": 63,"ik_hand_gun": 64,"ik_hand_l": 65,"ik_hand_r": 66
}Local_Trans_data = np.load("C:/Users/jinfullliu/Desktop/test_maya/Local_Trans.npy", allow_pickle = True)
local_Rotate_data = np.load("C:/Users/jinfullliu/Desktop/test_maya/local_Rotate.npy", allow_pickle = True)for joint in Joint_to_idx:joint_idx = Joint_to_idx[joint]obj = cmds.ls(joint)print("process ", obj)for frame in range(Local_Trans_data.shape[0]):cmds.setKeyframe(joint + '.translateX', value = Local_Trans_data[frame, joint_idx, 0], time=frame)cmds.setKeyframe(joint + '.translateY', value = Local_Trans_data[frame, joint_idx, 1], time=frame)cmds.setKeyframe(joint + '.translateZ', value = Local_Trans_data[frame, joint_idx, 2], time=frame)cmds.setKeyframe(joint + '.rotateX', value = local_Rotate_data[frame, joint_idx, 0], time=frame)cmds.setKeyframe(joint + '.rotateY', value = local_Rotate_data[frame, joint_idx, 1], time=frame)cmds.setKeyframe(joint + '.rotateZ', value = local_Rotate_data[frame, joint_idx, 2], time=frame)相关文章:
AIGC笔记--Maya提取和修改FBX动作文件
目录 1--Maya数据解析 2--FBX SDK导出6D数据 3--6D数据映射和Maya可视化 完整项目代码:Data-Processing/FBX_SDK_Maya 1--Maya数据解析 在软件Maya中直接拖入FBX文件,可以播放和查看人体各个骨骼关节点的数据: 对于上图来说,…...

【刷题训练】LeetCode125. 验证回文串
验证回文串 题目要求 示例 1: 输入: s “A man, a plan, a canal: Panama” 输出:true 解释:“amanaplanacanalpanama” 是回文串。 示例 2: 输入:s “race a car” 输出:false 解释:“rac…...

optee默认安全配置
OP-TEE(Open Portable Trusted Execution Environment)是一个开源的可移植的可信执行环境(TEE),用于提供安全和受保护的执行环境。它旨在为基于 ARM 架构的设备提供强大的安全性和隔离能力。 OP-TEE 主要由两部分组成…...
Arcgis新建位置分配求解最佳商店位置
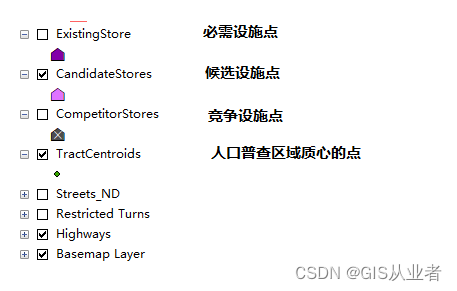
背景 借用Arcgis帮助文档中的说明:在本练习中,您将为连锁零售店选择可以获得最大业务量的商店位置。主要目标是要将商店定位在人口集中地区附近,因为这种区域对商店的需求量较大。设立这一目标的前提是假设人们往往更多光顾附近的商店,而对于距离较远的商店则较少光顾。您…...
【C++初阶】C++入门(上)
C的认识 ①什么是C? C语言是结构化和模块化的语言,适合处理较小规模的程序。对于复杂的问题,规模较大的程序,需要高度的抽象和建模时,C语言则不合适。 于是1982年,Bjarne Stroustrup(本…...

Vue.js+SpringBoot开发校园疫情防控管理系统
目录 一、摘要1.1 项目介绍1.2 项目录屏 二、功能模块2.1 学生2.2 老师2.3 学校管理部门 三、系统展示四、核心代码4.1 新增健康情况上报4.2 查询健康咨询4.3 新增离返校申请4.4 查询防疫物资4.5 查询防控宣传数据 五、免责说明 一、摘要 1.1 项目介绍 基于JAVAVueSpringBoot…...

客服销冠偷偷用的提效神器!无广很实用
近期发现我的同事每天上班必登录的一款软件——客服宝聊天助手,用过才发现:真客服办公的提效神器!感兴趣的小伙伴请往下看~一、客服宝的简介:客服宝聊天助手,是一款跨平台快捷回复工具。自带多种功能,有效帮…...
蓝桥杯刷题|02入门真题
[蓝桥杯 2022 省 B] 刷题统计 题目描述 小明决定从下周一开始努力刷题准备蓝桥杯竞赛。他计划周一至周五每天做 a 道题目,周六和周日每天做 b 道题目。请你帮小明计算,按照计划他将在第几天实现做题数大于等于 n 题? 输入格式 输入一行包含三个整数…...
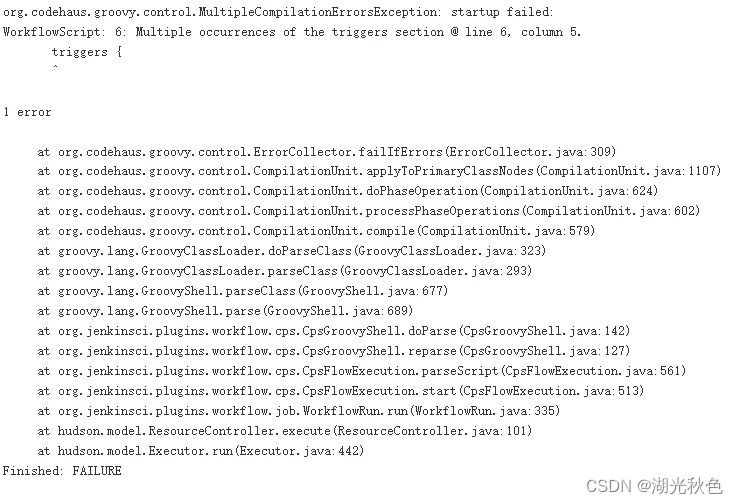
Jenkins cron定时构建触发器
from: https://www.jenkins.io/doc/book/pipeline/syntax/#cron-syntax 以下内容为根据Jenkins官方文档cron表达式部分翻译过来,使用机翻加个人理解补充内容,包括举例。 目录 介绍举例:设置方法方法一:方法二…...

【编程向导】JavaScript-创建对象一期讲解
工厂模式 工厂模式 是用来创建对象的一种最常用的设计模式。工厂模式不暴露创建对象的具体逻辑,而是将逻辑封装在一个函数中,那么这个函数就可以被视为一个工厂。工厂模式常见于大型项目,例如 jQuery 的 $ 对象,我们创建选择器对…...
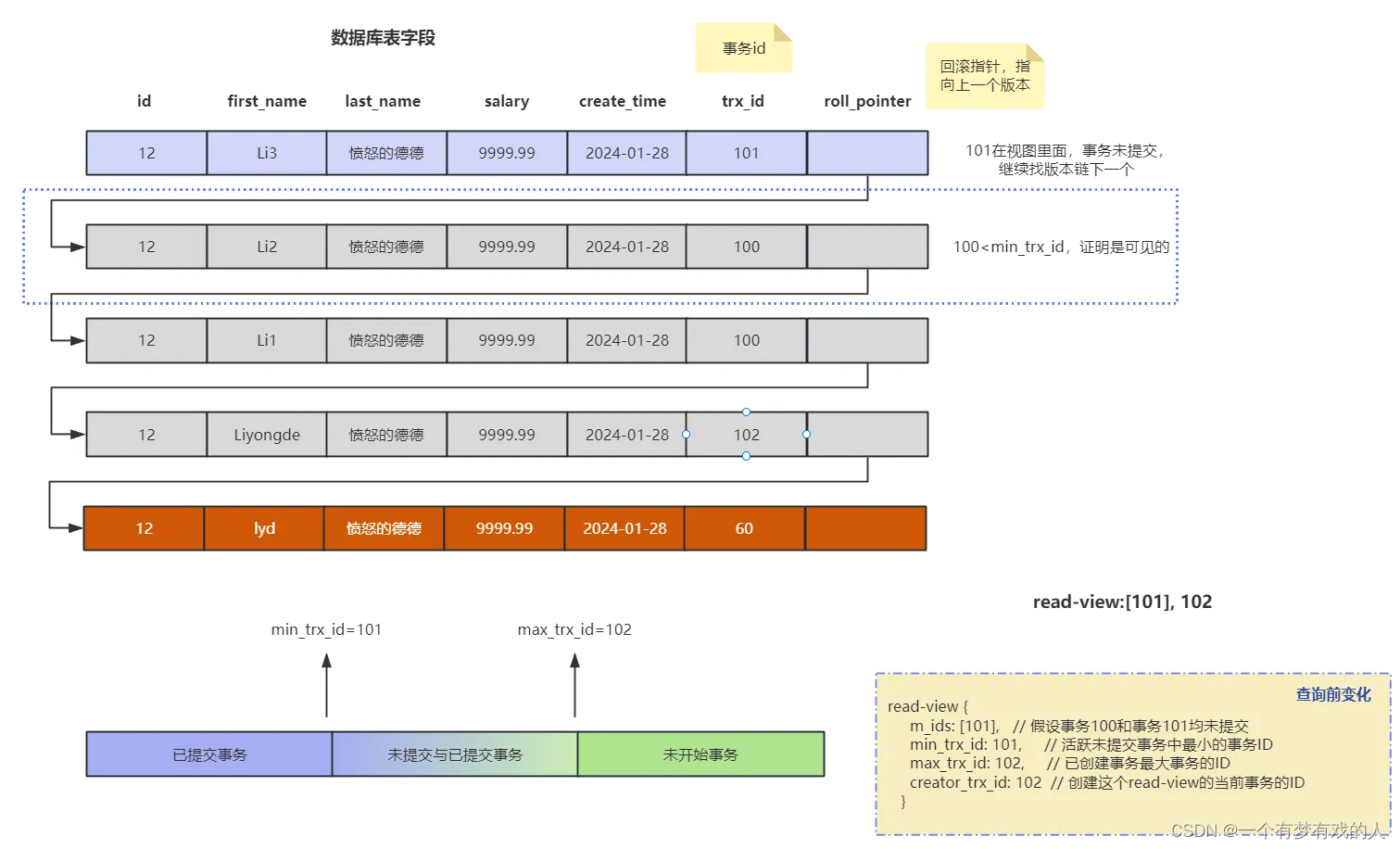
【MySQL性能优化】- 一文了解MVCC机制
MySQL理解MVCC 😄生命不息,写作不止 🔥 继续踏上学习之路,学之分享笔记 👊 总有一天我也能像各位大佬一样 🏆 博客首页 怒放吧德德 To记录领地 🌝分享学习心得,欢迎指正ÿ…...

性能测试-Redis
一、测试注意点 1、缓存预热 如果程序初次运行,此时由于数据尚未加载到缓存,则程序的响应时间会明显变长 注意事项: 性能测试的时候 出现 非常不稳定的现象程序刚启动,它的性能 明显 低于 已经运行一段时间的 1.1 测试缓存没…...

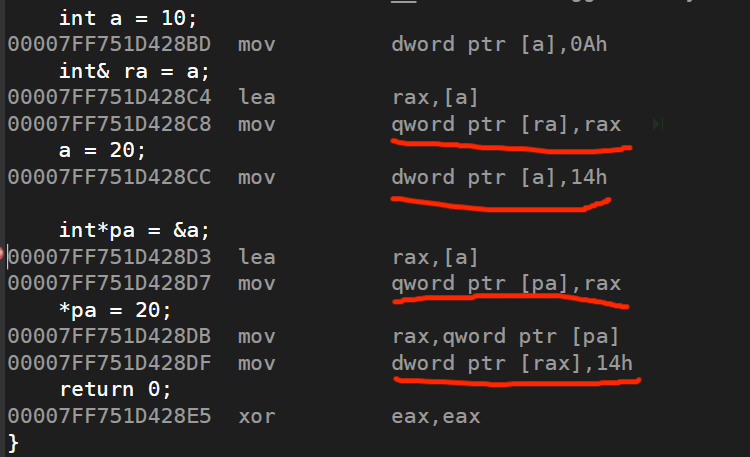
浅析C++的指针与引用
浅析C的指针与引用 文章目录 浅析C的指针与引用一、对比引用与指针二、引用左值引用右值引用引用折叠 三、指针与引用的性能差距总结 一、对比引用与指针 总论: 引用指针必须初始化可以不初始化不能为空可以为空不能更换目标可以更换目标 引用必须初始化ÿ…...
【消息队列开发】 实现消息删除逻辑
文章目录 🍃前言🌲实现步骤🚩检验参数的合法性🚩读取Message数据🚩二进制转为message🚩isValid 设置为无效🚩写入文件🚩更新统计文件🚩特别注意🚩完整代码 ⭕…...

【golang】28、用 httptest 做 web server 的 controller 的单测
文章目录 一、构建 HTTP server1.1 model.go1.2 server.go1.3 curl 验证 server 功能1.3.1 新建1.3.2 查询1.3.3 更新1.3.4 删除 二、httptest 测试2.1 完整示例2.2 实现逻辑2.3 其他示例2.4 用 TestMain 避免重复的测试代码2.5 gin 框架的 httptest 一、构建 HTTP server 1.1…...
)
296.【华为OD机试】污染水域 (图的多源BFS—JavaPythonC++JS实现)
🚀点击这里可直接跳转到本专栏,可查阅顶置最新的华为OD机试宝典~ 本专栏所有题目均包含优质解题思路,高质量解题代码(Java&Python&C++&JS分别实现),详细代码讲解,助你深入学习,深度掌握! 文章目录 一. 题目-污染水域二.解题思路三.题解代码Python题解代码…...
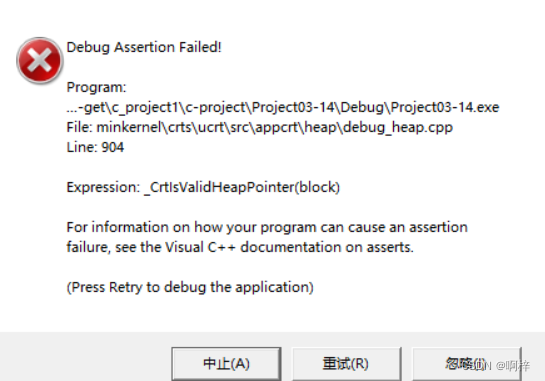
C语言——动态内存分配
前言:通过前面的学习,我们知道C语言中在内存中开辟空间的方法有:变量和数组。既然拥有了开辟空间的方法,我们为什么还要学习动态内存分配呢? int val 20; //在内存中开辟四个字节的空间 int arr[10] { 0 }; //在内…...

瑞_23种设计模式_策略模式
文章目录 1 策略模式(Strategy Pattern)★1.1 介绍1.2 概述1.3 策略模式的结构1.4 策略模式的优缺点1.5 策略模式的使用场景 2 案例一2.1 需求2.2 代码实现 3 案例二3.1 需求3.2 代码实现 4 JDK源码解析(Comparator) 🙊…...

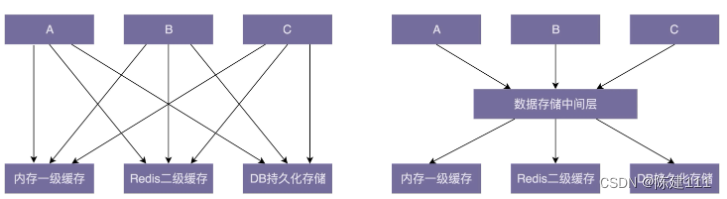
使用 OpenAI 的 text-embedding 构建知识向量库并进行相似搜索
OpenAI的embedding模型的使用 首先第一篇文章中探讨和使用了ChatGPT4的API-Key实现基础的多轮对话和流式输出,完成了对GPT-API的一个初探索,那第二步打算使用OpenAI的embedding模型来构建一个知识向量库,其实知识向量库本质上就是一个包含着一…...
设计模式学习笔记 - 规范与重构 - 5.如何通过封装、抽象、模块化、中间层解耦代码?
前言 《规范与重构 - 1.什么情况下要重构?重构什么?又该如何重构?》讲过,重构可以分为大规模高层重构(简称 “大型重构”)和小规模低层次重构(简称 “小型重构”)。大型重构是对系统…...

2026年腾讯云OpenClaw/Hermes Agent配置Token Plan怎么安装看这
2026年腾讯云OpenClaw/Hermes Agent配置Token Plan怎么安装看这。OpenClaw是开源的个人AI助手,Hermes Agent则是一个能自我进化的AI智能体框架。阿里云提供计算巢、轻量服务器及无影云电脑三种部署OpenClaw 与 Hermes Agent的方案、百炼Token Plan兼容主流 AI 工具&…...

Meta裁了8000人,员工拖着行李箱抢可乐
昨天凌晨4点,Meta很多员工的邮箱同时响了。是裁员邮件。这一次,Meta裁掉了全球约10%的员工,规模大约8000人。分手大礼包:16周基础薪资 每满1年工龄额外2周薪资 18个月全家医保。真正让硅谷炸锅的,反而是裁员前几天&a…...

岩土工程渗流问题之有限单元法--坝基渗流、围堰、土石坝自由面、黏土垫层防渗、污染土固化后渗控
第一天 有限元编程基础知识1.有限单元法基础简介(离散化、存储策略及方程解法、边界条件的处理)2.编程语言Fortran及编译工具Intel Visual Fortran(IVF)简介3.Fortran/Matlab/Julia等开源代码及程序库(geomlib/femlib)简介4.水工…...
)
别再死记硬背WideDeep了!用TensorFlow 2.x手把手复现Google Play的推荐模型(附源码)
从零实现Wide&Deep推荐模型:TensorFlow 2.x实战指南 在推荐系统领域,Google提出的Wide&Deep模型架构已经成为工业界的经典范式。但大多数教程仅停留在理论讲解层面,当开发者真正动手实现时,往往会遇到特征工程适配、联合训…...

5分钟快速上手:BepInEx游戏插件框架完全指南
5分钟快速上手:BepInEx游戏插件框架完全指南 【免费下载链接】BepInEx Unity / XNA game patcher and plugin framework 项目地址: https://gitcode.com/GitHub_Trending/be/BepInEx BepInEx是一款强大的游戏模组和插件框架,专门为Unity Mono、IL…...
)
别再让串口中断拖慢你的STM32F407了!手把手教你配置UART4的DMA收发(附完整代码)
STM32F407 UART4 DMA通信实战:突破串口中断的性能瓶颈 如果你正在使用STM32F407的UART4进行数据通信,却频繁遇到系统响应迟缓的问题,很可能是因为传统的串口中断方式正在消耗大量CPU资源。每次收发一个字节都触发中断,当数据量大…...

如何为Public Money Public Code网站添加新的支持组织:完整操作指南
如何为Public Money Public Code网站添加新的支持组织:完整操作指南 【免费下载链接】publiccode.asia-legacy Website of https://publiccode.asia 项目地址: https://gitcode.com/gh_mirrors/pu/publiccode.asia-legacy 想要为publiccode.asia这个开源项目…...

为内部ai工具平台选择统一api网关时taotoken的接入与管理价值
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为内部AI工具平台选择统一API网关时Taotoken的接入与管理价值 当公司内部需要构建一个集成多种AI能力的工具平台时,技术…...

终极SSDTTime指南:快速免费的系统硬件优化神器
终极SSDTTime指南:快速免费的系统硬件优化神器 【免费下载链接】SSDTTime SSDT/DSDT hotpatch attempts. 项目地址: https://gitcode.com/gh_mirrors/ss/SSDTTime 在计算机硬件优化领域,SSDTTime是一款革命性的跨平台工具,专为简化SSD…...
)
AI Agent在制造业的隐秘革命(产线故障预测Agent首次公开技术栈)
更多请点击: https://kaifayun.com 第一章:AI Agent在制造业的隐秘革命(产线故障预测Agent首次公开技术栈) 当振动传感器每秒回传8,192点时序数据、PLC日志以毫秒级时间戳持续写入边缘缓存,传统阈值告警系统正悄然失…...