【进阶五】Python实现SDVRP(需求拆分)常见求解算法——蚁群算法(ACO)
基于python语言,采用经典遗传算法(ACO)对 需求拆分车辆路径规划问题(SDVRP) 进行求解。
目录
- 往期优质资源
- 1. 适用场景
- 2. 代码调整
- 3. 求解结果
- 4. 代码片段
- 参考
往期优质资源
经过一年多的创作,目前已经成熟的代码列举如下,如有需求可私信联系,表明需要的 问题与算法,原创不宜,有偿获取。
| VRP问题 | GA | ACO | ALNS | DE | DPSO | QDPSO | TS | SA |
|---|---|---|---|---|---|---|---|---|
| CVRP | √ | √ | √ | √ | √ | √ | √ | √ |
| VRPTW | √ | √ | √ | √ | √ | √ | √ | √ |
| MDVRP | √ | √ | √ | √ | √ | √ | √ | √ |
| MDHVRP | √ | √ | √ | √ | √ | √ | √ | √ |
| MDHVRPTW | √ | √ | √ | √ | √ | √ | √ | √ |
| SDVRP | √ | √ |
1. 适用场景
- 求解CVRP
- 车辆类型单一
- 车辆容量小于部分需求节点需求
- 单一车辆基地
2. 代码调整
与CVRP问题相比,SDVRP问题允许客户需求大于车辆容量。为了使得每个客户的需求得到满足,必须派遣一辆或多辆车辆对客户进行服务,也就是需要对客户的需求进行拆分。关于如何进行拆分一般有两种方式:
- 先验拆分策略:提前制定策略对客户的需求(尤其是大于车辆容量的客户需求)进行分解,将SDVRP问题转化为CVRP问题
- 过程拆分策略:在车辆服务过程中对客户需求进行动态拆分
本文采用文献[1]提出的先验分割策略,表述如下:
(1)20/10/5/1拆分规则
- m20 =max{ m ∈ Z + ∪ { 0 } ∣ 0.20 Q m < = D i m\in Z^+ \cup \{0\} | 0.20Qm <= D_i m∈Z+∪{0}∣0.20Qm<=Di }
- m10 =max{ m ∈ Z + ∪ { 0 } ∣ 0.10 Q m < = D i − 0.20 Q m 20 m\in Z^+ \cup \{0\} | 0.10Qm <= D_i-0.20Qm_{20}~ m∈Z+∪{0}∣0.10Qm<=Di−0.20Qm20 }
- m5 =max{ m ∈ Z + ∪ { 0 } ∣ 0.05 Q m < = D i − 0.20 Q m 20 − 0.10 Q m 10 m\in Z^+ \cup \{0\} | 0.05Qm <= D_i-0.20Qm_{20}-0.10Qm_{10} m∈Z+∪{0}∣0.05Qm<=Di−0.20Qm20−0.10Qm10 }
- m1 =max{ m ∈ Z + ∪ { 0 } ∣ 0.01 Q m < = D i − 0.20 Q m 20 − 0.10 Q m 10 − 0.05 Q m 5 m\in Z^+ \cup \{0\} | 0.01Qm <= D_i-0.20Qm_{20}-0.10Qm_{10}-0.05Qm_{5} m∈Z+∪{0}∣0.01Qm<=Di−0.20Qm20−0.10Qm10−0.05Qm5 }
(2)25/10/5/1拆分规则
- m25 =max{ m ∈ Z + ∪ { 0 } ∣ 0.25 Q m < = D i m\in Z^+ \cup \{0\} | 0.25Qm <= D_i m∈Z+∪{0}∣0.25Qm<=Di }
- m10 =max{ m ∈ Z + ∪ { 0 } ∣ 0.10 Q m < = D i − 0.25 Q m 25 m\in Z^+ \cup \{0\} | 0.10Qm <= D_i-0.25Qm_{25}~ m∈Z+∪{0}∣0.10Qm<=Di−0.25Qm25 }
- m5 =max{ m ∈ Z + ∪ { 0 } ∣ 0.05 Q m < = D i − 0.25 Q m 25 − 0.10 Q m 10 m\in Z^+ \cup \{0\} | 0.05Qm <= D_i-0.25Qm_{25}-0.10Qm_{10} m∈Z+∪{0}∣0.05Qm<=Di−0.25Qm25−0.10Qm10 }
- m1 =max{ m ∈ Z + ∪ { 0 } ∣ 0.01 Q m < = D i − 0.25 Q m 25 − 0.10 Q m 10 − 0.05 Q m 5 m\in Z^+ \cup \{0\} | 0.01Qm <= D_i-0.25Qm_{25}-0.10Qm_{10}-0.05Qm_{5} m∈Z+∪{0}∣0.01Qm<=Di−0.25Qm25−0.10Qm10−0.05Qm5 }
在实现过程中,对于需求超过车辆容量的客户必须进行需求拆分,而对于未超过车辆容量的客户可以拆分也可以不拆分,这里设置了参数比例进行限制。
3. 求解结果
(1)收敛曲线

(2)车辆路径

4. 代码片段
(1)数据结构
# 数据结构:解
class Sol():def __init__(self):self.node_no_seq = None # 节点id有序排列self.obj = None # 目标函数self.fitness = None # 适应度self.route_list = None # 车辆路径集合self.route_distance_list = None # 车辆路径长度集合
# 数据结构:网络节点
class Node():def __init__(self):self.id = 0 # 节点idself.x_coord = 0 # 节点平面横坐标self.y_coord = 0 # 节点平面纵坐标self.demand = 0 # 节点需求
# 数据结构:全局参数
class Model():def __init__(self):self.best_sol = None # 全局最优解self.demand_id_list = [] # 需求节点集合self.demand_dict = {}self.sol_list = [] # 解的集合self.depot = None # 车场节点self.number_of_demands = 0 # 需求节点数量self.vehicle_cap = 0 # 车辆最大容量self.distance_matrix = {} # 节点距离矩阵self.demand_id_list_ = [] # 经先验需求分割后的节点集合self.demand_dict_ = {} # 需求分割后的节点需求集合self.distance_matrix_ = {} # 原始节点id间的距离矩阵self.mapping = {} # 需求分割前后的节点对应关系self.split_rate = 0.5 # 控制需求分割的比例(需求超出车辆容量的除外)self.popsize = 100 # 种群规模self.alpha = 2 # 信息启发式因子self.beta = 3 # 期望启发式因子self.Q = 100 # 信息素总量self.rho = 0.5 # 信息素挥发因子self.tau = {} # 弧信息素集合self.tau0 = 100 # 路径初始信息素
(2)距离矩阵
# 初始化参数
def cal_distance_matrix(model):for i in model.demand_id_list:for j in model.demand_id_list:d=math.sqrt((model.demand_dict[i].x_coord-model.demand_dict[j].x_coord)**2+(model.demand_dict[i].y_coord-model.demand_dict[j].y_coord)**2)model.distance_matrix[i,j]=ddist = math.sqrt((model.demand_dict[i].x_coord - model.depot.x_coord) ** 2 + (model.demand_dict[i].y_coord - model.depot.y_coord) ** 2)model.distance_matrix[i, model.depot.id] = distmodel.distance_matrix[model.depot.id, i] = dist
(3)蚁群移动
# 蚂蚁移动
def movePosition(model):sol_list=[]local_sol=Sol()local_sol.obj=float('inf')for _ in range(model.popsize):#随机初始化蚂蚁为止node_no_seq=[random.randint(0,len(model.demand_id_list_)-1)]all_node_no_seq=copy.deepcopy(model.demand_id_list_)all_node_no_seq.remove(node_no_seq[-1])#确定下一个访问节点while len(all_node_no_seq)>0:next_node_no=searchNextNode(model,node_no_seq[-1],all_node_no_seq)node_no_seq.append(next_node_no)all_node_no_seq.remove(next_node_no)sol=Sol()sol.node_no_seq=node_no_seqsol.obj,sol.route_list,sol.route_distance=calObj(node_no_seq,model)sol_list.append(sol)if sol.obj < local_sol.obj:local_sol = copy.deepcopy(sol)model.sol_list=copy.deepcopy(sol_list)if local_sol.obj<model.best_sol.obj:model.best_sol=copy.deepcopy(local_sol)
# 搜索下一移动节点
def searchNextNode(model,current_node_no,SE_List):prob=np.zeros(len(SE_List))for i,node_no in enumerate(SE_List):eta=1/model.distance_matrix_[current_node_no,node_no] if model.distance_matrix_[current_node_no,node_no] else 0.0001tau=model.tau[current_node_no,node_no]prob[i]=((eta**model.alpha)*(tau**model.beta))#采用轮盘法选择下一个访问节点cumsumprob=(prob/sum(prob)).cumsum()cumsumprob -= np.random.rand()return SE_List[list(cumsumprob >= 0).index(True)]
# 更新路径信息素
def upateTau(model):rho=model.rhofor k in model.tau.keys():model.tau[k]=(1-rho)*model.tau[k]#根据解的node_no_seq属性更新路径信息素(TSP问题的解)for sol in model.sol_list:node_no_seq=sol.node_no_seqfor i in range(len(node_no_seq)-1):from_node_no=node_no_seq[i]to_node_no=node_no_seq[i+1]model.tau[from_node_no,to_node_no]+= model.Q/sol.objfor k in model.tau.keys():model.tau[k]= max(model.tau[k],0.000001)
参考
【1】 A novel approach to solve the split delivery vehicle routing problem
相关文章:
【进阶五】Python实现SDVRP(需求拆分)常见求解算法——蚁群算法(ACO)
基于python语言,采用经典遗传算法(ACO)对 需求拆分车辆路径规划问题(SDVRP) 进行求解。 目录 往期优质资源1. 适用场景2. 代码调整3. 求解结果4. 代码片段参考 往期优质资源 经过一年多的创作,目前已经成熟…...
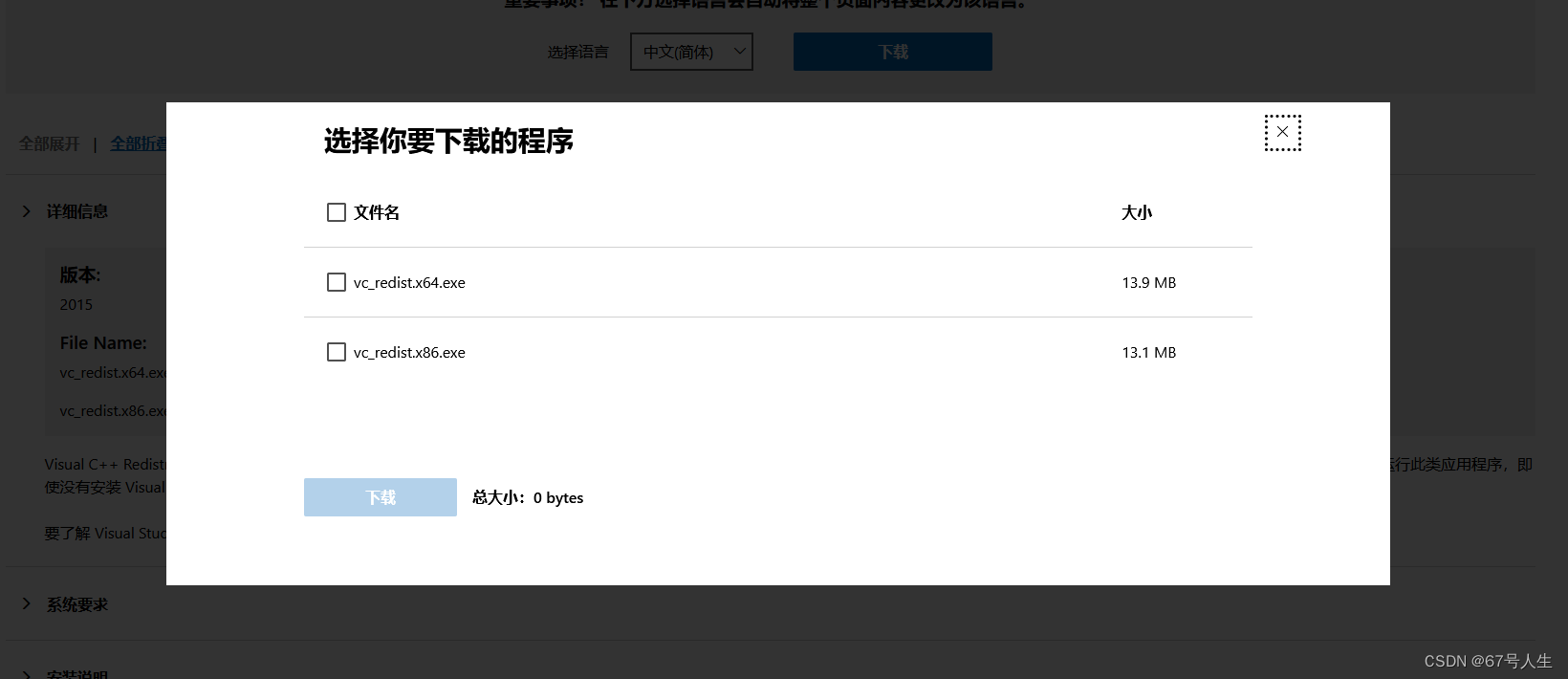
php.exe运行时,提示缺少VCRUNTIME140.dll
php.exe运行时,提示缺少VCRUNTIME140.dll 下载地址 https://www.microsoft.com/zh-cn/download/details.aspx?id48145根据需要选择下载3.运行安装后,再次运行php.exe。...

Android垃圾回收机制
1.垃圾回收机制 垃圾回收,也叫GC(Garbage Collection),指的是释放垃圾占用的空间,防止内存泄露。有效的使用可以使用的内存,对内存堆中已经死亡的或者长时间没有使用的对象进行清除和回收。 JVM的内存区域主要分为程序计数器、虚…...

深度学习专家学习计划
深度学习专家学习计划 一、学习背景与目标 作为一名有6年工作经验的Java开发人员,您已具备基本的编程能力和数据处理经验。现计划转岗至深度学习领域,成为深度学习专家。本计划将结合您的工作背景和现有知识,为您制定详细且精确的学习计划,帮助您逐步达到专家水平。 二、…...

关于Ubuntu虚拟机突然上不了网的问题
今天刚重新把Ubuntu虚拟机下回来准备大干一场,结果去吃饭回来虚拟机就上不去网了,具体体现为右上角没有网络的图标,下图是有网络的情况,废话不多说,直接给出解决方案:博客在此 我就是运行了这三行代码就成功…...

[mysql必备面试题]-InnoDB和MyISAM引擎的区别
InnoDB 是 MySQL 默认的事务型存储引擎,只有在需要它不支持的特性时,才考虑使用其它存储引擎。 实现了四个标准的隔离级别,默认级别是可重复读(REPEATABLE READ)。在可重复读隔离级别下,通过多版本并发控制(MVCC) 间隙锁(Next-K…...

android 播放rtsp流的三种方式,2024阿里Android高级面试题总结
使用SurfaceViewMediaPlayer <SurfaceView android:id“id/surface_view” android:layout_width“250dp” android:layout_height“250dp” app:layout_constraintRight_toRightOf“parent” app:layout_constraintTop_toTopOf“parent” /> private String uri …...
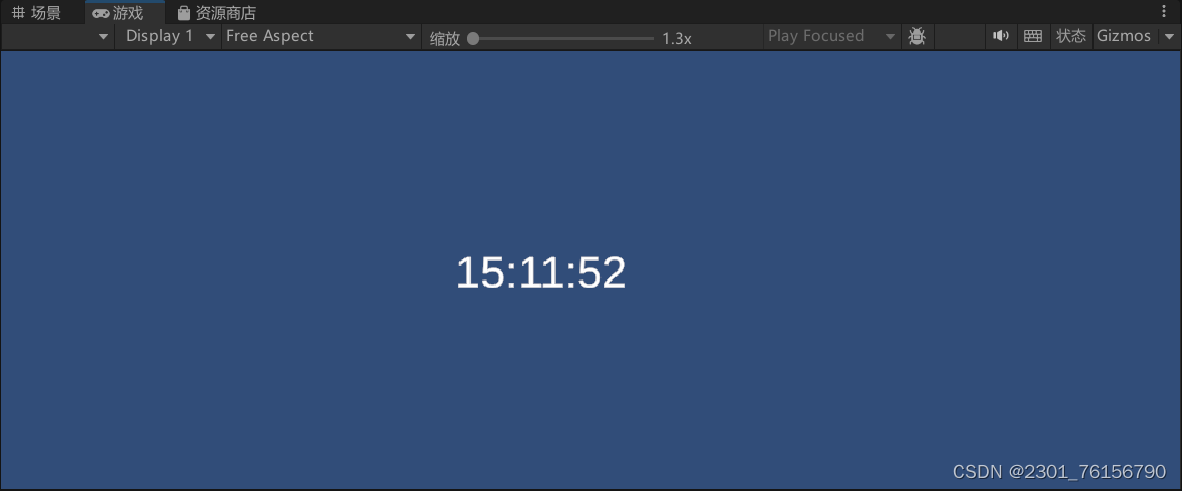
unity显示当前时间
1建立文本组件和一个空对象 2创建一个脚本并复制下面代码 using System.Collections; using System.Collections.Generic; using TMPro; using UnityEngine;public class showtime: MonoBehaviour {public TextMeshProUGUI time;private void Update(){string currentTime Sy…...

SDK报错(1)undefined reference to `f_mount‘
利用SDK读取sd卡时,添加了xilffs库,而且包含了ff.h头文件,还是对fat库的函数报错 网上有的说在ARM v7 gcc linker中添加xilffs的方法可以解决,但我试了没有用 最后在赛灵思论坛找到了一个解决方法,原文连接如下 在SDK…...

YOLOv8_pose-Openvino和ONNXRuntime推理【CPU】
纯检测系列: YOLOv5-Openvino和ONNXRuntime推理【CPU】 YOLOv6-Openvino和ONNXRuntime推理【CPU】 YOLOv8-Openvino和ONNXRuntime推理【CPU】 YOLOv7-Openvino和ONNXRuntime推理【CPU】 YOLOv9-Openvino和ONNXRuntime推理【CPU】 跟踪系列: YOLOv5/6/7-O…...

百科 | 光伏电站如何开展运维工作?
从目前太阳能光伏电站的运行管理工作实际经验看,要保证光伏发电系统安全、经济、高效运行,必须建立规范和有效的管理机制,特别是要加强电站的运行维护管理。 一、建立完善的技术文件管理体系 对每个电站都要建立全面完整的技术文件资料档案…...

监听抖音直播间的评论并实现存储
监听抖音直播间评论,主要是动态监听dom元素的变化,如果评论是图片类型的,获取alt的值 主要采用的是MutationObserver:https://developer.mozilla.org/zh-CN/docs/Web/API/MutationObserver index.js如下所示:function getPL() {…...

一体机电脑辐射超标整改
电脑一体机是目前台式机和笔记本电脑之间的一个新型的市场产物,它将主机部分、显示器部分整合到一起的新形态电脑,该产品的创新在于内部元件的高度集成。随着无线技术的发展,电脑一体机的键盘、鼠标与显示器可实现无线链接,机器只…...

重学SpringBoot3-路径匹配机制
更多SpringBoot3内容请关注我的专栏:《SpringBoot3》 期待您的点赞👍收藏⭐评论✍ 重学SpringBoot3-路径匹配机制 AntPathMatcherPathPatternParser 和 PathPattern演示AntPathMatcher 示例PathPattern 示例性能和精确度的提升 选择使用哪一种 在 Spring…...

【贪心算法】摆动序列
如果连续数字之间的差严格地在正数和负数之间交替,则数字序列称为 摆动序列 。第一个差(如果存在的话)可能是正数或负数。仅有一个元素或者含两个不等元素的序列也视作摆动序列。 例如, [1, 7, 4, 9, 2, 5] 是一个 摆动序列 &…...

Unload-labs
function checkFile() {var file document.getElementsByName(upload_file)[0].value;if (file null || file "") {alert("请选择要上传的文件!");return false;}//定义允许上传的文件类型var allow_ext ".jpg|.png|.gif";//提取上传文件的类…...

SRS-220VDC-4Z-10A静态中间继电器 额定电压DC220V 四副转换触点 JOSEF约瑟
系列型号: SRS-24VDC-4Z-8A静态中间继电器;SRS-24VDC-4Z-10A静态中间继电器; SRS-24VDC-4Z-16A静态中间继电器;SRS-24VAC-4Z-8A静态中间继电器; SRS-24VAC-4Z-10A静态中间继电器;SRS-24VAC-4Z-16A静态中…...
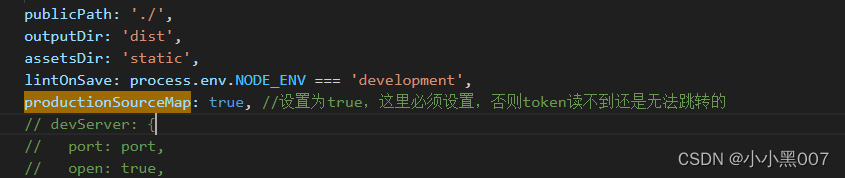
解决electron打包vue-element-admin项目页面无法跳转的问题
解决electron打包vue-element-admin项目页面无法跳转的问题 说明之前通过这个教程已经打包成功,但是发现进行账号密码登录后页面无法跳转的问题。现在已经解决,所以记录一下。 1、检查路由模式是否为hash模式,如果不是改成hash模式。 new Ro…...

Uniapp Vue2 image src动态绑定static目录下的图片
报错的static地址写法: this.url ../static/img.png this.url /static/img.png 正确的static地址写法: this.url /static/img.png 动态绑定 <image :src"url"></image>...

【UE5】动画混合空间的基本用法
项目资源文末百度网盘自取 什么是动画混合空间 混合空间分为两种: 通过一个数值控制通过两个数值控制 下面通过演示让大家更直观地了解 在Character文件夹中单击右键,选择动画(Animation),选择旧有的混合空间1D 然后选择骨骼(动画是基于骨骼显示的,所以需要选择…...

3步搞定TikTok音乐提取:DouK-Downloader终极免费工具使用指南
3步搞定TikTok音乐提取:DouK-Downloader终极免费工具使用指南 【免费下载链接】TikTokDownloader TikTok 发布/喜欢/合辑/直播/视频/图集/音乐;抖音发布/喜欢/收藏/收藏夹/视频/图集/实况/直播/音乐/合集/评论/账号/搜索/热榜数据采集工具/下载工具 项…...

军规零外源设备要求,无感定位完全替代UWB硬件堆叠方案
军规零外源设备要求,无感定位完全替代UWB硬件堆叠方案军队营区管控、战备执勤、野外演训、涉密阵地等场景,严格遵循军规装备管理准则,奉行零外源附加设备硬性管控标准,严禁额外加装大量外置终端、基站、线缆类附属设施。传统UWB定…...

Windows虚拟机完美运行macOS:OSX-Hyper-V终极实践指南
Windows虚拟机完美运行macOS:OSX-Hyper-V终极实践指南 【免费下载链接】OSX-Hyper-V OpenCore configuration for running macOS on Windows Hyper-V. 项目地址: https://gitcode.com/gh_mirrors/os/OSX-Hyper-V 你是否曾经梦想在一台Windows电脑上同时拥有m…...

农业Agent不是“加个模型”,而是重写作业流程:3张架构图讲透农机调度、病虫害预警、供应链匹配的Agent协同范式
更多请点击: https://intelliparadigm.com 第一章:农业Agent不是“加个模型”,而是重写作业流程:3张架构图讲透农机调度、病虫害预警、供应链匹配的Agent协同范式 农业智能化的真正瓶颈,从来不在单点AI能力的强弱&…...

工业机器视觉工控机选型指南:从硬件配置到现场调试
1. 产品定位与核心价值解析在工业自动化领域,尤其是机器视觉应用场景中,稳定、可靠且性能强劲的硬件平台是整套系统能够7x24小时无间断运行的基石。朗锐智科推出的这款机器视觉工控机,从其核心配置来看,精准地瞄准了中高端视觉检测…...

从零到课标对齐:用Claude批量生成校本课程资源,72小时内完成一学期备课,你还在手动写?
更多请点击: https://intelliparadigm.com 第一章:从零到课标对齐:用Claude批量生成校本课程资源,72小时内完成一学期备课,你还在手动写? 教育数字化转型已进入深水区,一线教师却仍陷于“写教案…...

WSA Toolbox:Windows 11上一键安装Android应用的智能解决方案
WSA Toolbox:Windows 11上一键安装Android应用的智能解决方案 【免费下载链接】wsa-toolbox A Windows 11 application to easily install and use the Windows Subsystem For Android™ package on your computer. 项目地址: https://gitcode.com/gh_mirrors/ws/…...

Path of Building PoE2:终极流放之路2角色构建指南与实战教程
Path of Building PoE2:终极流放之路2角色构建指南与实战教程 【免费下载链接】PathOfBuilding-PoE2 项目地址: https://gitcode.com/GitHub_Trending/pa/PathOfBuilding-PoE2 想要在《流放之路2》中打造完美角色吗?Path of Building PoE2&#…...

终极指南:如何用Word Checker轻松实现中英文拼写自动纠正
终极指南:如何用Word Checker轻松实现中英文拼写自动纠正 【免费下载链接】word-checker 🇨🇳🇬🇧Chinese and English word spelling corrector.(中文易错别字检测,中文拼写检测纠正。英文单词拼写校验工具…...

新手开发者首次接触 Taotoken 控制台的功能导览与核心操作
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 新手开发者首次接触 Taotoken 控制台的功能导览与核心操作 当你注册并登录 Taotoken 平台后,首先进入的就是控制台。这…...