SLAM 算法综述
LiDAR SLAM
其主要思想是通过两个算法:一个高频激光里程计进行低精度的运动估计,即使用激光雷达做里程计计算两次扫描之间的位姿变换;另一个是执行低频但是高精度的建图与校正里程计,利用多次扫描的结果构建地图,细化位姿轨迹。
LOAM
论文:Lidar Odometry and Mapping in Real-time(RSS2014) Ji Zhang
LOAM使用了作者定义的特征点提取和匹配方法,主要去边角点和平面点。LOAM use a new defined feature system (corner and flat point), for the detail see its article.
LOAM假设每一次激光扫描过程中是匀速运动(工程应用时要注意实际载体运动特性),并且用这个假设修正激光雷达数据的运动扭曲问题。在VLOAM中则是更进一步,使用视觉的里程计估计每一个扫描数据的运动。LOAM suppose linear motion within the scan swap (VLOAM further uses visual odometry to estimate it), and undistort the lidar points.
LOAM也有一个低频率调用的全局优化线程。
LOAM一文中提出,可以通过IMU进行辅助。所谓“辅助”就是在激光雷达两次扫描之间,利用IMU得到较为准确的变化轨迹,从而进行点云畸变的去除,从而不需要靠上次扫描获得的运动参数插值对这次的畸变进行去除,能够提升精度。但IMU的数据并没有参与到优化当中,所以IMU在LOAM算法中只起到了辅助作用
A-LOAM
代码:https://github.com/HKUST-Aerial-Robotics/A-LOAM,香港科技大学秦通博士
A-LOAM代码通过ROS运行。在LOAM原有代码基础上,使用Ceres-solver和Eigen库对其进行重构和优化,在保持原有算法原理的基础上,使其可读性大大增加。
主要区别:
1.LOAM中提供了使用IMU信息修正的接口, A-LOAM中省略了这一块。
2.A-LOAM中缺少了对提取到的特征点的筛选过程,具体可以参见LOAM的代码部分(对一些不好的边角点做了筛选)。
3.LOAM中作者解析地求出了雅各比的表达式(其中使用了一些小技巧统一了不同特征点的残差函数的导数表达),A-LOAM则是简单地使用了ceres提供的自动求导工具(这样可以节省开发的时间,得到了也是准确的解,但是运算时间会稍稍长些,具体可以参见ceres的官方文档)。
LeGO-LOAM
LeGO-LOAM:LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain .Tixiao Shan and B. Englot,
IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018.
LeGO-LOAM 是Tixiao Shan在原有LOAM基础上,做了一些改进包括:1、对前端里程计的前量化改造,提取地面点更适配水平安装的LiDAR; 2、使用SLAM中的Keyframe概念以及回环检测位姿图优化的方式对后端进行重构。
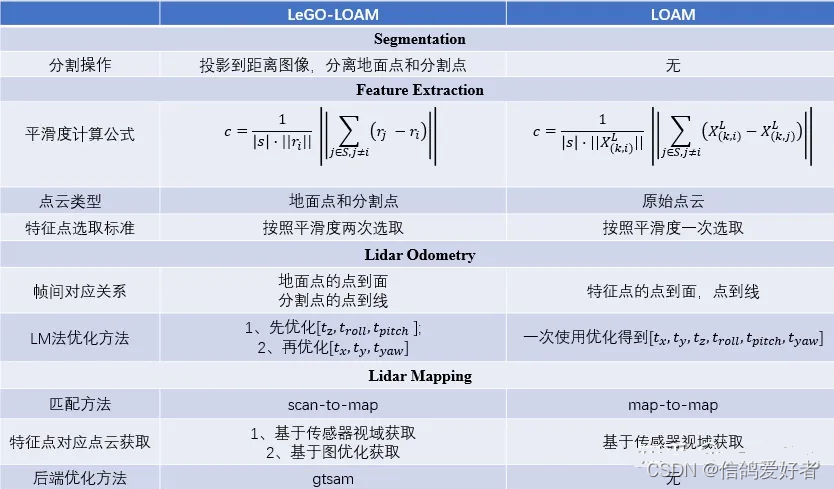
从文章名称,可以看出,LeGO-LOAM相对于LOAM的提升主要在于轻量级和地面优化。接下来,我将从论文的整体框架入手,详解介绍LeGO-LOAM和LOAM的区别和联系。
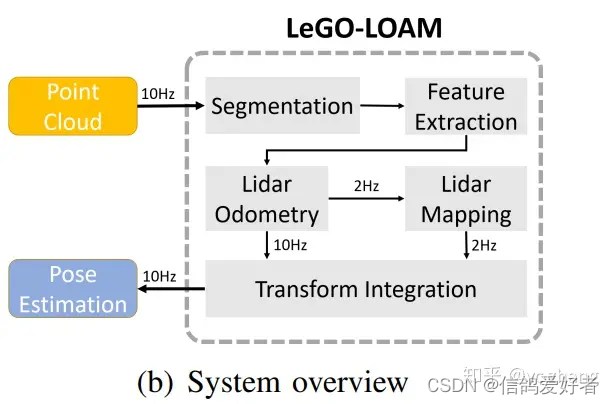
核心四个部分:分割,特征提取,雷达里程计,雷达建图。
分割模块通过对一帧的点云重投影到图像中,进行地面分割,非地面点被分割出来;
特征提取模块基于分割后的点使用和LOAM一样的方法提取边缘点和平面点;
雷达里程计模块基于提取的特征点构建约束关系,使用两次LM优化,得到姿态变换矩阵;
雷达建图模块将得到的特征点进一步处理,构建 的约束关系,构建全局地图。
GTSAM
GTSAM(Georgia Tech Smoothing and Mapping)是基于因子图的C++库,它由佐治亚理工学院的教授和学生们创造。它可以解决slam和sfm的问题,当然它也可以解决简单或者更加复杂的估计问题。
因子图是一种图模型,非常适合于复杂的估计问题的建模,比如SLAM或者是SFM( Structure from Motion)。
因子图的三个基本组成部分:
因子图(factor graph):它属于一个二分图,由因子和变量连接而成。
变量(variables):估计问题中的未知随机变量。
因子(factors):非线性因子表示变量之间的约束,在slam中,可能为landmark或者odometry的读数。
LIO-Mapping
LIO-Mapping:Tightly Coupled 3D Lidar Inertial Odometry and Mapping,H. Ye, Y. Chen, and M. Liu,IEEE International Conference on Robotics and Automation, pp. 3144-3150, 2019.
主要是借鉴LOAM和VINS-Mono的思想进行联合状态估计,工程层面和VINS-Mono一样,只不过是前端视觉部分换成了Lidar的前端进行特征关联,这是第一篇开源的Lidar-IMU紧耦合SLAM算法。
见《https://blog.csdn.net/weixin_44580210/article/details/120541054》
LIO-SAM
LIO-SAM: *Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping.Tixiao Shan, Brendan Englot, Drew Meyers, Wei Wang, Carlo Ratti, and Daniela Rus.*2020
LIO-SAM 是Tixiao Shan在LeGO-LOAM的扩展,添加了IMU预积分因子和GPS因子:前端使用紧耦合的IMU融合方式,替代原有的帧间里程计,使得前端更轻量;后端沿用LeGO-LOAM,在此基础上融入了GPS观测。同时前端后端相互耦合,提高系统精度。
LIO-SAM中的扫描匹配优化部分代码是直接套用LOAM,该部分代码的最大特点是没有利用任何开源的优化库(ceres-solver, g2o, gtsam…)进行残差方程的优化,而是只基于Eigen库构造了高斯牛顿迭代算法对残差方程进行优化,获得最小二乘解.但是,为了提升对后端残差方程优化的理解,抛弃开源优化库只利用Eigen库构造优化过程是一个非常推崇的做法.
该算法是一个紧耦合的雷达惯导里程计(Tightly-coupled Lidar Inertial Odometry),借助的手段就是利用GT-SAM库中的方法。提出了一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架。实现了高精度、实时的移动机器人的轨迹估计和建图。
框架的构成:
通过相对观测(两帧间的估计)及绝对观测(GPS),还包括回环检测,构成因子图。
这个框架必须要有激光雷达和IMU。可以没有回环和GPS。
IMU的作用:
用IMU的数据对激光雷达点云作畸变矫正为激光雷达里程计的优化提供一个初值
系统对IMU的作用:
获得的雷达里程计会用来估计IMU的零偏(bias)
点云匹配建图方式:
为了保障性能和实时,并不是将激光雷达一帧数据和全局地图进行匹配,而是和经过边缘化的历史地图进行匹配;这种当前帧和局部地图配置而不是全局地图的做法,可以显著提高系统的实时性。
局部地图构成:
通过选取关键帧的方式,利用滑窗的方法,将当前的关键帧和历史尺度和大小一致的子关键帧集合配准。
cartographer
谷歌于2016年开源了Cartographer的SLAM库。Cartographer可以使用2D或3D激光雷达来进行SLAM(同时定位与地图构建),用Grid(2D/3D)的形式建地图;局部匹配直接建模成一个非线性优化问题,通过IMU(惯性测量单元陀螺仪)获得比较靠谱的初值,再用Ceres库进行求解;后端用Graph来优化,用分支定界算法来加速;2D和3D的问题统一在一个框架下解决。
cartographer主要解决室内问题,LOAM室内外都可以,但是没有回环检测。Cartographer的3D部分,更像是2D的扩展:即用2D的思路去做3D的事情。而LOAM则主要解决3D问题,其核心思路难以解决2D问题。
Cartographer基本上实现了低成本雷达,低计算资源消耗,实时优化,精度尚可。
相关文章:
SLAM 算法综述
LiDAR SLAM 其主要思想是通过两个算法:一个高频激光里程计进行低精度的运动估计,即使用激光雷达做里程计计算两次扫描之间的位姿变换;另一个是执行低频但是高精度的建图与校正里程计,利用多次扫描的结果构建地图,细化位…...

搭建Hadoop3.x完全分布式集群
零、资源准备 虚拟机相关: VMware workstation 16:虚拟机 > vmware_177981.zipCentOS Stream 9:虚拟机 > CentOS-Stream-9-latest-x86_64-dvd1.iso Hadoop相关 jdk1.8:JDK > jdk-8u261-linux-x64.tar.gzHadoop 3.3.6&am…...
)
linux常用命令(二)
目录 前言 常用命令 1.ls命令 2. cd命令 3.pwd命令 4.mkdir 命令 5. rmdir 命令 6.rm 命令 7.cp命令 8.mv命令 9.touch命令 10.cat命令 11.more命令 12.less命令 13.head命令 14.tail命令 15.tail命令 16.find命令 17.tar命令 18.gzip命令 19.gunzip命令 …...

【Vue】Request模块 - axios 封装Vuex的持久化存储
📝个人主页:五敷有你 🔥系列专栏:Vue ⛺️稳中求进,晒太阳 Request模块 - axios 封装 使用axios来请求后端接口,一般会对axios进行一些配置(比如配置基础地址,请求响应拦截器…...

【2024第一期CANN训练营】4、AscendCL推理应用开发
文章目录 【2024第一期CANN训练营】4、AscendCL推理应用开发1. 创建代码目录2. 构建模型2.1 下载原始模型文件2.2 使用ATC工具转换模型2.3 注意事项 3. 模型加载3.1 示例代码 4. 模型执行4.1 获取模型描述信息4.2 准备输入/输出数据结构4.3 执行模型推理4.4 释放内存和数据类型…...

Rust 构建开源 Pingora 框架可以与nginx媲美
一、概述 Cloudflare 为何弃用 Nginx,选择使用 Rust 重新构建新的代理 Pingora 框架。Cloudflare 成立于2010年,是一家领先的云服务提供商,专注于内容分发网络(CDN)和分布式域名解析。它提供一系列安全和性能优化服务…...

MediaCodec源码分析 ACodec状态详解
前言 本文分析ACodec状态机,ACodec是MediaCodec的底层实现,在MediaCodec命令下切换不同状态进行编解码,基于7.0代码。 ACodec状态介绍 UninitializedState:未初始化状态。 在业务层调用MediaCodec. createByCodecName 完成后切换到LoadedState。 LoadedState:表示解码器…...
【Elasticsearch】windows安装elasticsearch教程及遇到的坑
一、安装参考 1、安装参考:ES的安装使用(windows版) elasticsearch的下载地址:https://www.elastic.co/cn/downloads/elasticsearch ik分词器的下载地址:https://github.com/medcl/elasticsearch-analysis-ik/releases kibana可视化工具下载…...

如何快速搭建物联网工业云平台
随着物联网技术的快速发展,物联网工业云平台已经成为推动工业领域数字化转型的重要引擎。合沃作为专业的物联网云服务提供商,致力于为企业提供高效、可靠的物联网工业云平台解决方案。本文将深入探讨物联网工业云平台的功能、解决行业痛点的能力以及如何…...

Spring Data访问Elasticsearch----Elasticsearch对象映射
Spring Data访问Elasticsearch----Elasticsearch对象映射 一、元模型(Meta Model)对象映射1.1 映射注解概述1.1.1 控制向Elasticsearch写入和从其读取哪些属性1.1.2 日期格式映射1.1.3 Range类型1.1.4 映射的字段名1.1.5 Non-field-backed属性1.1.6 其他属性注解 1.2 映射规则1…...

Linux之shell循环
华子目录 for循环带列表的for循环格式分析示例shell允许用户指定for语句的步长,格式如下示例 不带列表的for循环示例 基于C语言风格的for循环格式示例注意 while循环格式示例 until循环作用格式示例 循环控制breakcontinue详细语法示例 循环嵌套示例 for循环 for循…...
|基本语法概述)
Python入门教程(一)|基本语法概述
目录 1. 注释 2. 变量和数据类型 3. 控制流 4. 函数 5. 类与对象 6. 异常处理 7. 模块和包 8. 文件操作 1. 注释 在Python中,单行注释以#开始,多行注释使用三个引号 """ 或 。 # 这是单行注释""" 这是 多行 注释…...
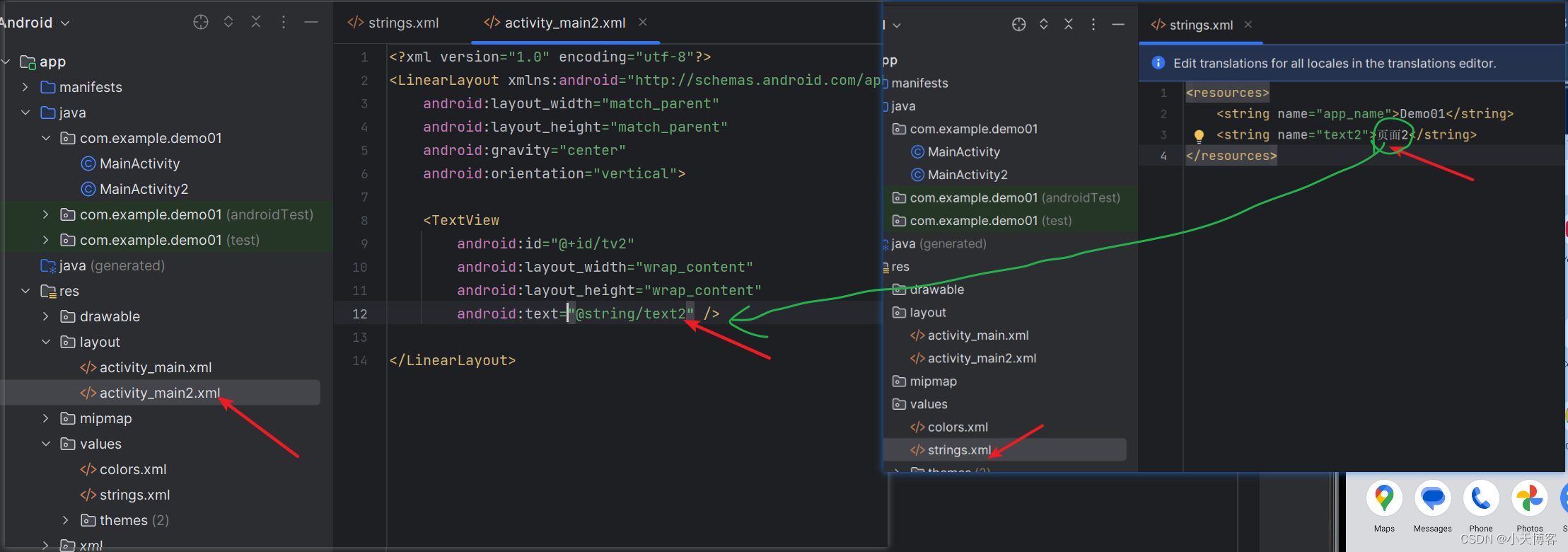
Android Studio入门——页面跳转
1.工程目录 2.MainActivity package com.example.demo01;import android.content.Intent; import android.os.Bundle; import android.view.View; import android.widget.TextView;import androidx.appcompat.app.AppCompatActivity;public class MainActivity extends AppCo…...
肝了三天,完成了AIGC工具网站大全,建议收藏再看
说是肝了三天,其实远远不止,前前后后,从资料搜集到最后整理成文,有近一个月了,大家看在整理不易的份上,给点个赞吧,不要光顾着收藏呀! 国内网站 AIGC 导航 https://www.aigc.cn 网…...
算法练习:前缀和
目录 1. 一维前缀和2. 二维前缀和3. 寻找数组中心下标4. 除自身以外数组的乘积5. !和为k的子数字6. !和可被k整除的子数组7. !连续数组8. 矩阵区域和 1. 一维前缀和 题目信息: 题目链接: 一维前缀和思路:求前缀和数组,sum dp[r] …...

Kafka MQ 生产者
Kafka MQ 生产者 生产者概览 尽管生产者 API 使用起来很简单,但消息的发送过程还是有点复杂的。图 3-1 展示了向 Kafka 发送消息的主要步骤。 我们从创建一个 ProducerRecord 对象开始,ProducerRecord 对象需要包含目标主题和要发送的内容。我们还可以…...

SQLiteC/C++接口详细介绍之sqlite3类(十)
返回目录:SQLite—免费开源数据库系列文章目录 上一篇:SQLiteC/C接口详细介绍之sqlite3类(九) 下一篇:SQLiteC/C接口详细介绍之sqlite3类(十一) 30.sqlite3_enable_load_extension&#x…...

Vue中nextTick一文详解
什么是 nextTick? 在 Vue 中,当我们修改数据时,Vue 会自动更新视图。但是,由于 JavaScript 的事件循环机制,我们无法立即得知视图更新完成的时机。这时候,我们就需要使用 nextTick 来获取视图更新完成后的…...

爱奇艺 CTR 场景下的 GPU 推理性能优化
01 背景介绍 GPU 目前大量应用在了爱奇艺深度学习平台上。GPU 拥有成百上千个处理核心,能够并行的执行大量指令,非常适合用来做深度学习相关的计算。在 CV(计算机视觉),NLP(自然语言处理)的模型…...
详解MySql索引
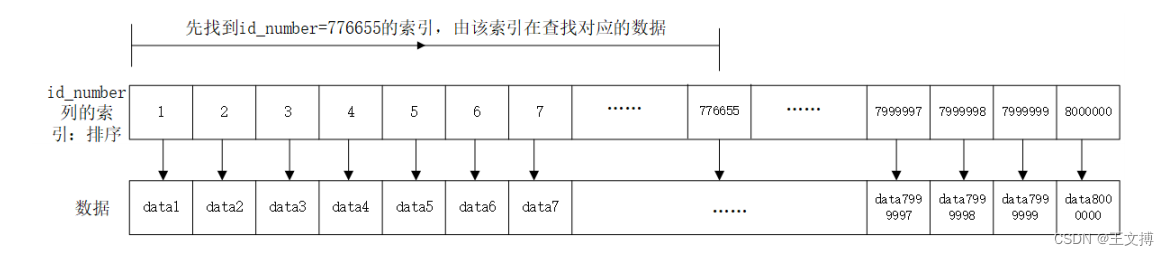
目录 一 、概念 二、使用场景 三、索引使用 四、索引存在问题 五、命中索引问题 六、索引执行原理 一 、概念 索引是一种特殊的文件,包含着对数据表里所有记录的引用指针。暂时可以理解成C语言的指针,文章后面详解 二、使用场景 数据量较大,且…...

浅聊26上半年软考架构师
2026年上半年架构师考试已然落幕,大家都考的如何?架构师共有三门考试,上午综合知识(75道选择题)案例分析,时间为8.30-12.30;下午论文,时间为14.30-16.30。下面说说我整体的备考过程。…...
)
放弃编码器!纯靠MPU6050和PID算法,手把手教你用TT马达实现平衡小车稳定控制(STM32F103C8T6实战)
纯MPU6050STM32F103的TT马达平衡车实战:无编码器PID控制全解析当大多数平衡小车方案都在强调编码器对速度反馈的不可或缺性时,我们决定挑战一个更极简的配置:仅用5美元的TT马达、9轴的MPU6050和STM32F103C8T6最小系统板,完全舍弃编…...

荣耀出征官方网站下载正版手游 翅膀养成细节玩法全方位讲解
玩荣耀出征的玩家都清楚,翅膀不仅是角色的颜值象征,更是提升整体战力的核心途径。很多新手玩家只顾着升级、刷装备,完全忽略翅膀养成,导致等级很高但战力始终上不去。还有不少玩家胡乱合成、盲目进阶,浪费了大量稀有翅…...

AI算力要上天?别笑,太空数据中心真能干翻地球电费!
前言你有没有算过,训练一个大模型,相当于烧掉多少吨煤?如今AI狂飙突进,算力需求指数级增长,可地球上的电——不够用了!更别说建个数据中心还得跟地方政府“斗智斗勇”,抢地皮、配储能、扛审批&a…...

长期使用Token Plan套餐在项目开发中的成本观察
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Token Plan套餐在项目开发中的成本观察 在AI驱动的项目开发中,成本控制与预算管理是团队负责人必须面对的现实…...

【DeepSeek漏洞扫描辅助实战指南】:20年安全专家亲授3大避坑法则与5步提效流程
更多请点击: https://intelliparadigm.com 第一章:DeepSeek漏洞扫描辅助的核心价值与适用边界 DeepSeek漏洞扫描辅助并非通用型渗透测试引擎,而是一个聚焦于大语言模型(LLM)应用层安全的轻量级分析工具。其核心价值在…...

【RT-DETR实战】070、模型分析工具:PyTorch Profiler性能分析
上周在部署RT-DETR到边缘设备时遇到一个诡异现象:模型推理时延波动极大,有时30ms,偶尔突然跳到200ms。 盯着代码看了半天没发现逻辑问题,数据流也正常。这种时候,靠猜是没用的,必须上性能分析工具——PyTorch Profiler。 今天我们就来聊聊怎么用它揪出那些藏在细节里的…...

3分钟上手:NBTExplorer终极指南 - 可视化编辑Minecraft游戏数据的免费神器
3分钟上手:NBTExplorer终极指南 - 可视化编辑Minecraft游戏数据的免费神器 【免费下载链接】NBTExplorer A graphical NBT editor for all Minecraft NBT data sources 项目地址: https://gitcode.com/gh_mirrors/nb/NBTExplorer 你是否曾经想要修改Minecraf…...

实战教程:5步构建基于YOLOv5的FPS游戏智能瞄准系统
实战教程:5步构建基于YOLOv5的FPS游戏智能瞄准系统 【免费下载链接】FPSAutomaticAiming 基于yolov5的FPS游戏AI。 项目地址: https://gitcode.com/gh_mirrors/fp/FPSAutomaticAiming FPSAutomaticAiming是一个基于YOLOv5深度学习算法的FPS游戏自动瞄准系统&…...

AhMyth混淆技术:Android RAT的APK反编译保护与代码混淆全指南
AhMyth混淆技术:Android RAT的APK反编译保护与代码混淆全指南 【免费下载链接】AhMyth Cross-Platform Android Remote Administration Tool | The only maintained version of AhMyth on github | A revival of the original repository at https://GitHub.com/AhM…...