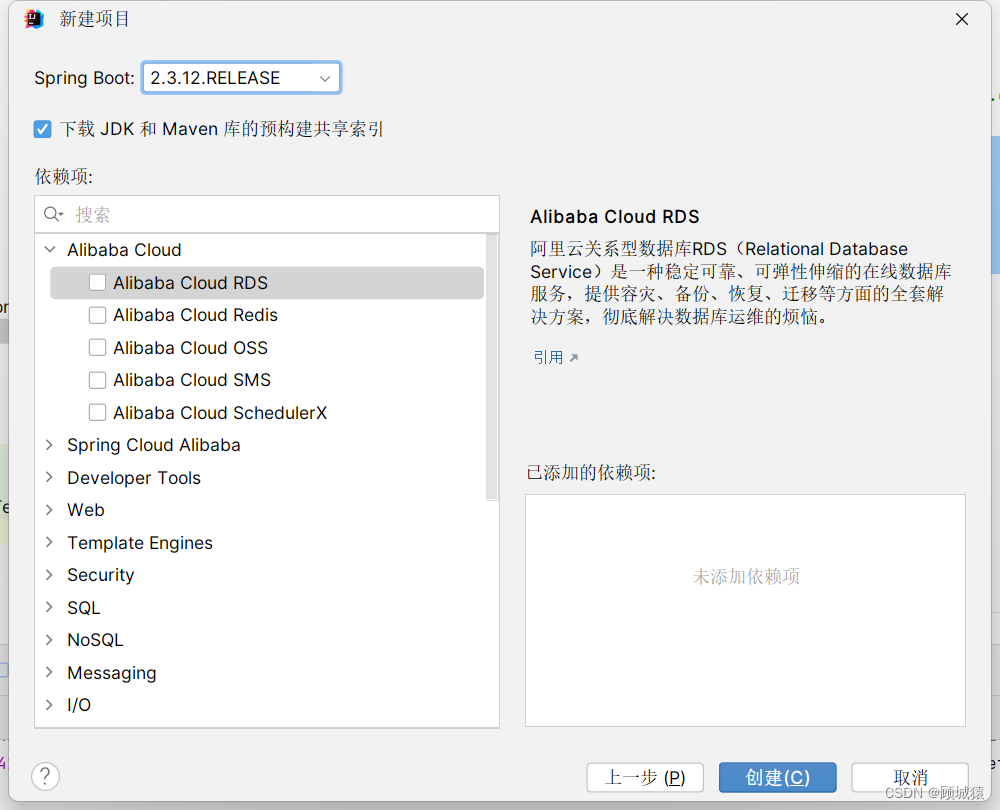
MaixSense-A010 接入 ROS
MaixSense 是什么
MaixSense 系列产品搭载 TOF 深度摄像头,目前有 MaixSense-A010 和 MaixSense-A075V 两款产品。
MS-A010 是一款由 BL702 + 炬佑 100x100 TOF 模组所组成的极致性价比的 TOF 3D 传感器模组,最大支持 100x100 的分辨率和 8 位精度,并且带有 240×135 的 LCD 显示屏可实时预览 color map 后的深度图。
而 MS-A075V 是一款具有 RGB 功能的 3D TOF 摄像机模组,该模组可以实现 Linux 免驱的即插即用,实现实时彩色 3D 显示。
参数如下:

MaixSense 能做什么
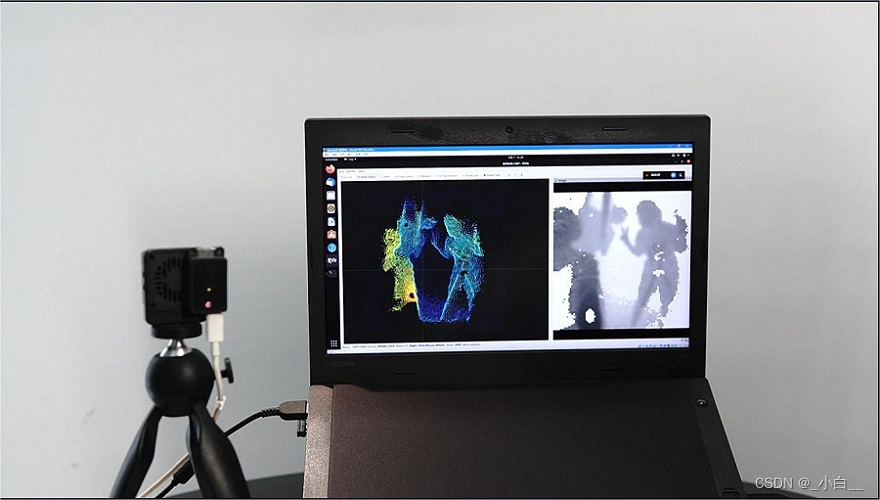
远中近物体实拍
高精度的映射物品摆放距离的差异,点云图可直观感受到更真实的可视化。


人流统计
可实时监控人流,进行高精度、大分辨率的统计。


小车避障
可搭载于小车移动并判断画面是否有障碍物,模组自带 LCD 屏幕精准显示距离并做出反应规避障碍物。

键盘灯跟随
实现超酷炫的键盘灯跟随,实时跟踪手部的位置,再根据手部的位置映射键盘灯。

体积测量

外接 MCU
MS-A010 拥有强大的兼容性,基于串口协议的数据传输。
可外接 K210 bit 这样的单片机开发板或树莓派之类的 linux 开发板来进行二次开发。

接入 ROS1 / ROS2
双支持 ROS 系统,开放 ROS1+ROS2 接入功能包,可快速获得深度数据及深度图。

TOF 技术
TOF: 是一种距离测量的方法,通过测量发射器和反射器之间的超声波/微波/光等信号的“飞行时间”来计算两者之间的距离。 可以实现TOF测距的是TOF传感器。 最常用的是红外线或激光测距。
物体之间的距离存在差异。 该模块通过捕获的深度值的差异来显示冷色和暖色。冷暖色随着距离的映射而变化,距离越近色调呈暖调(橘红)而越远色调呈冷调(蓝色)。


更多详细资料不再赘述,见:https://wiki.sipeed.com/hardware/zh/maixsense/maixsense-a010/maixsense-a010.html
接入 ROS1(Linux)
publisher 代码(使用 type-C 虚拟串口)
代码(网上下载)
不要下载网站上的那个接入包,实测不好用。用下面这个:
git clone https://github.com/sipeed/MaixSense_ROS.git
然后我把目录下的 ros1 挪到了自己常用的工作空间,目录结构如下。(视个人情况而定)

cd ~/mynewestros
catkin_make
运行 publisher
rosrun sipeed_tof_ms_a010 node device:="/dev/ttyUSB0"
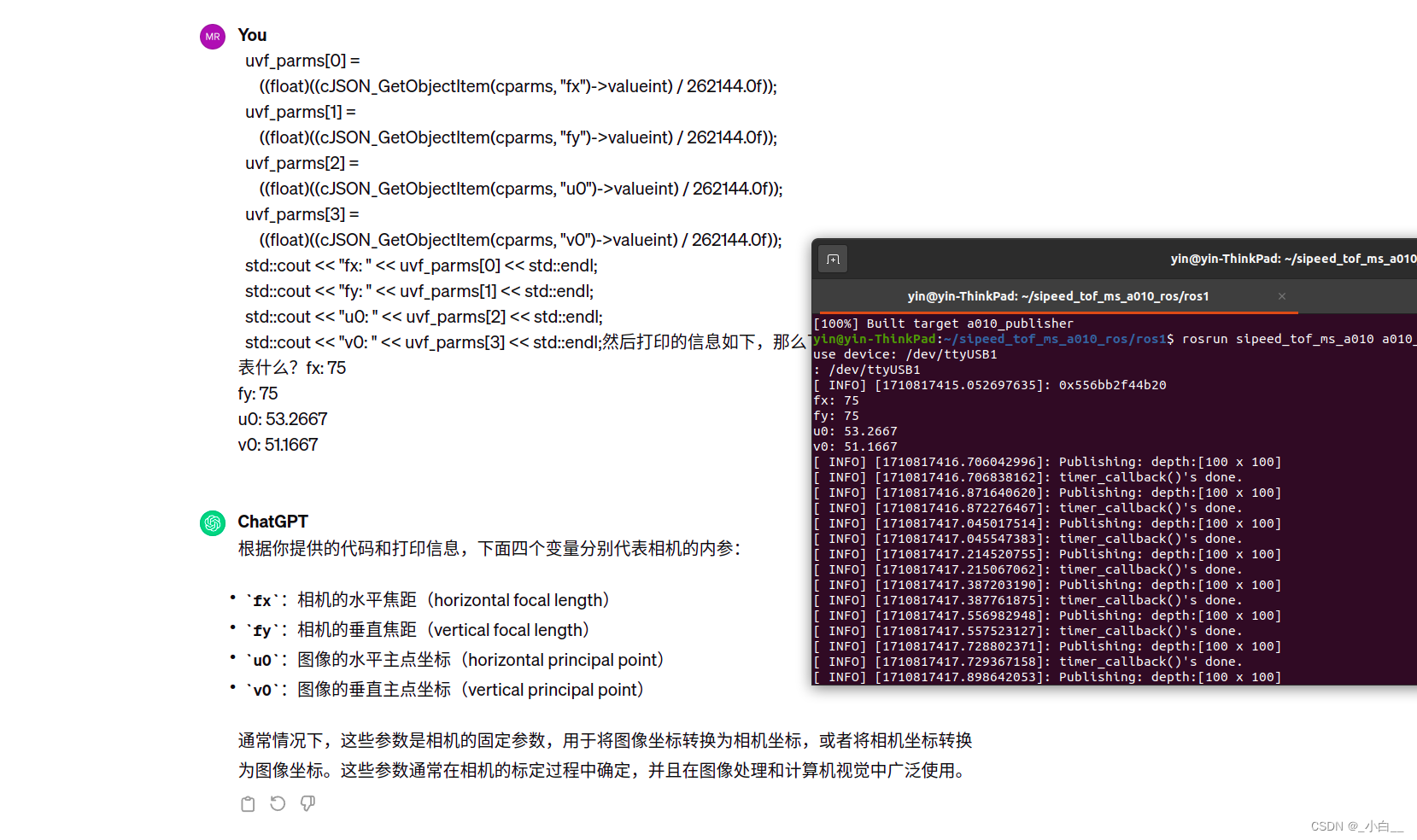
效果类似于如下:(当时是使用了不好用的旧接入包,所以只看输出的四个参数即可)
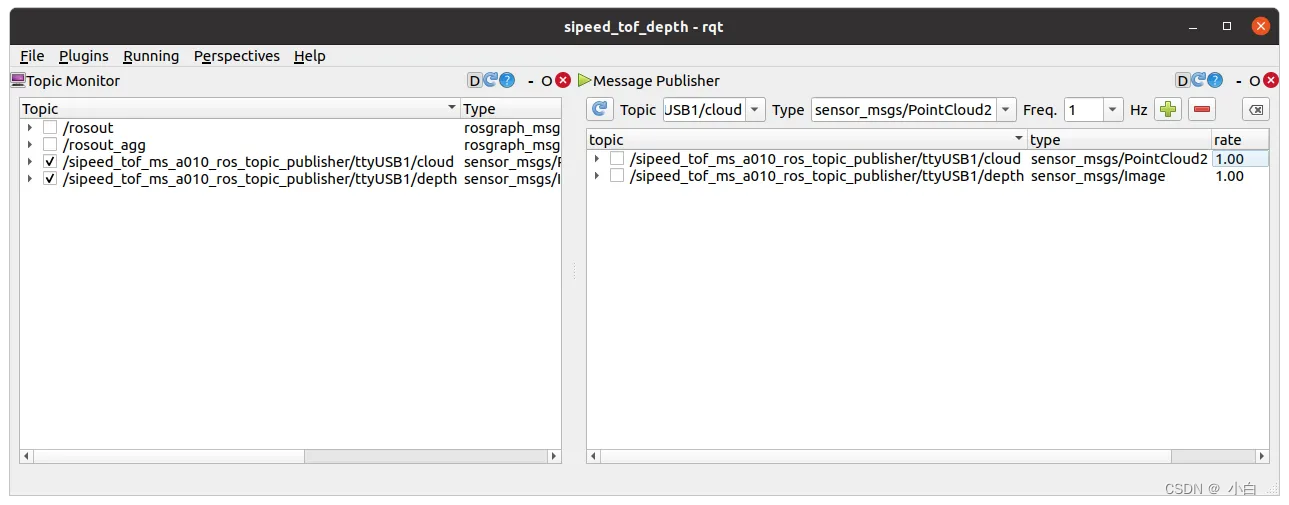
rqt 查看帧率
Plugins —> Topics —> Message Publisher
然后运行节点:
rosrun sipeed_tof_ms_a010 node device:="/dev/ttyUSB0"
效果如下:

rviz 预览
rosrun sipeed_tof_ms_a010 node device:="/dev/ttyUSB0"
rviz

代码里 header.frame_id 是什么,Global Options - Fixed Frame 就填什么。


subscriber 代码(使用 type-C 虚拟串口)
运行 subscriber
rosrun sipeed_tof_ms_a010 msghandler device:="/dev/ttyUSB0"
代码(自行编写)
#include <ros/ros.h>
#include <sensor_msgs/Image.h>
#include <sensor_msgs/PointCloud2.h>
#include <iostream>void pointDepthCallback(const sensor_msgs::ImageConstPtr& msg)
{// 打印点云中的点数// ROS_INFO("Received point cloud with %d points", msg->width * msg->height);
}void pointCloudCallback(const sensor_msgs::PointCloud2ConstPtr& msg)
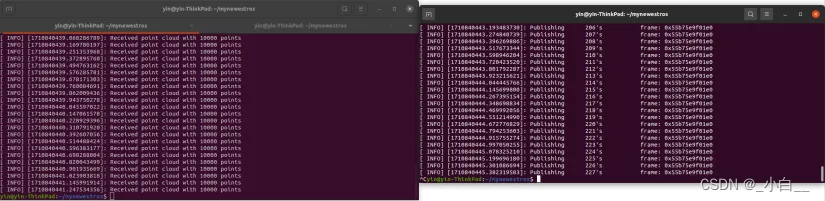
{// 打印点云中的点数ROS_INFO("Received point cloud with %d points", msg->width * msg->height);
}int main (int argc, char **argv)
{// 初始化ROS节点ros::init(argc, argv, "point_cloud_processor");// 创建节点句柄ros::NodeHandle nh("~");std::string s;nh.param<std::string>("device", s, "/dev/ttyUSB0");std::cout << "use device: " << s << std::endl;std::string from_device(s.substr(5));std::stringstream sd;std::stringstream sc;// 订阅深度信息sd.str("");sd << "/" << from_device << "/depth";std::cout << sd.str() << std::endl;ros::Subscriber sub_depth = nh.subscribe<sensor_msgs::Image>(strdup(sd.str().c_str()), 1, pointDepthCallback);std::cout << strdup(sd.str().c_str()) << std::endl;// 订阅点云数据sc.str("");sc << "/" << from_device << "/cloud";std::cout << sc.str() << std::endl;ros::Subscriber sub_cloud = nh.subscribe<sensor_msgs::PointCloud2>(strdup(sc.str().c_str()), 1, pointCloudCallback);std::cout << strdup(sc.str().c_str()) << std::endl;// 循环处理ROS消息ros::spin();return 0;
}
这里有个小坑,明天再说吧,早该下班了~
看一下实现效果吧:
注意!!
在运行节点时,所填的参数不一定是“/dev/ttyUSB0”,可能是“/dev/ttyUSB1”、/dev/ttyUSB2“”、“/dev/ttyUSB3”……
所以要提前查看一下有效的 USB 口。
ls /dev/ttyUSB
# 然后狂摁Tab
相关文章:
MaixSense-A010 接入 ROS
MaixSense 是什么 MaixSense 系列产品搭载 TOF 深度摄像头,目前有 MaixSense-A010 和 MaixSense-A075V 两款产品。 MS-A010 是一款由 BL702 炬佑 100x100 TOF 模组所组成的极致性价比的 TOF 3D 传感器模组,最大支持 100x100 的分辨率和 8 位精度&…...
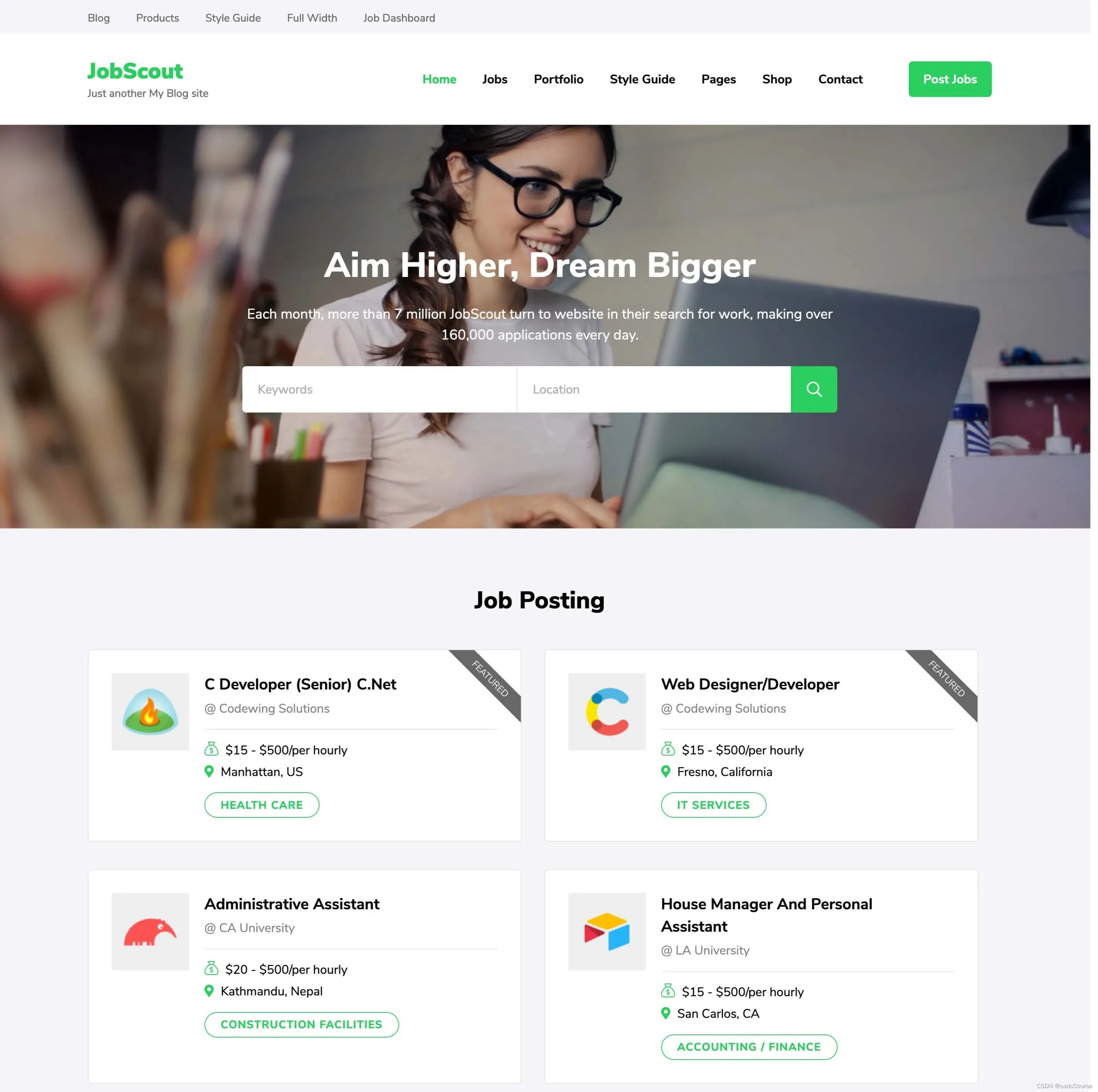
使用WordPress在US Domain Center上建立招聘网站的详细教程
第一部分:介绍招聘网站 招聘网站是指用于发布招聘信息、吸引求职者、进行简历筛选和管理招聘流程的网站。在WordPress中,您可以轻松地创建一个功能齐全的招聘网站,以便企业能够方便地管理招聘流程,并为求职者提供信息和应聘渠道。…...
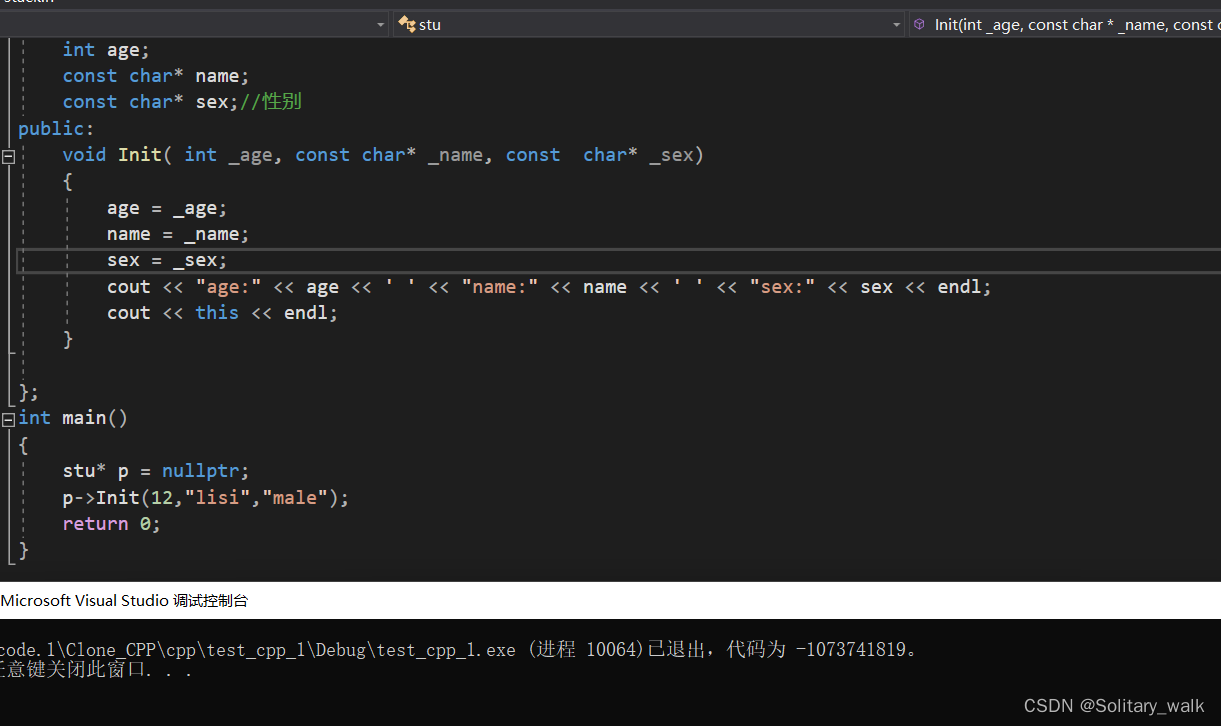
C++:类和对象(上篇)
目录: 一:面向对象和过程的介绍 二:类的引入 三:类的定义 四:类的访问限定符以及封装 五:类的作用域 六:类的实例化 七:类对象大小的计算 八:类成员函数的this指…...

氧化铝电容的工艺结构原理及选型参数总结
🏡《总目录》 目录 1,概述2,工作原理3,结构特点4,工艺流程4.1,材料准备4.2,氧化处理4.3,薄膜处理4.4,电极制作4.5,封装4.6,测试与筛选5,选型参数5.1,电容量(Capacitance)...
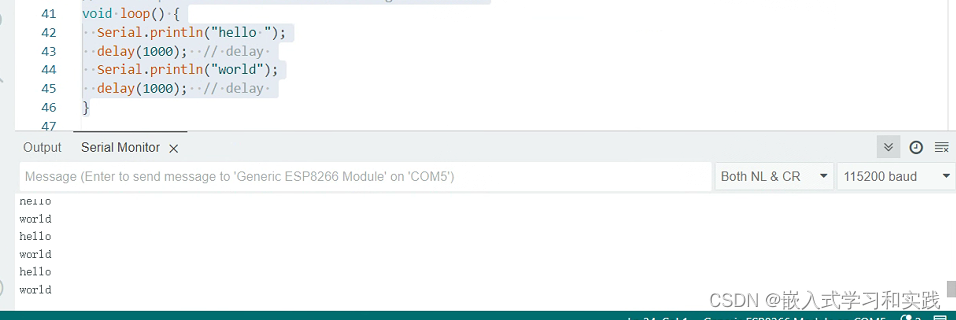
野火ESP8266模块开发-基于Arduino IDE
一、野火ESP8266模块介绍 ESP8266 拥有高性能无线 SOC,给移动平台设计师带来福音,它以最低成本提供最大实用性,为 WiFi 功能嵌入其他系统提供无限可能。ESP8266 是一个完整且自成体系的 WiFi 网络解决方案,能够独立运行࿰…...

[Qt学习笔记]Qt实现自定义控件SwitchButton开关按钮
1、功能介绍 在项目UI中使用较多的打开/关闭的开关按钮,一般都是找图片去做效果,比如说如下的图像来表征打开或关闭。 如果想要控件有打开/关闭的动画效果或比较好的视觉效果,这里就可以使用自定义控件,使用Painter来绘制控件。软…...

【工具】mac 环境配置
【待补充 】 一、maven配置 vim ~/.bash_profile export M3_HOME/Users/chenyang/java_utils/apache-maven-3.6.1 export PATH$PATH:$M3_HOME/bin //mvn -v提示Permission denied 没有权限访问 chmod ax /Users/chenyang/java_utils/apache-maven-3.6.1/bin/mvn 二、java…...

【前端寻宝之路】学习和总结HTML的标签属性
🌈个人主页: Aileen_0v0 🔥热门专栏: 华为鸿蒙系统学习|计算机网络|数据结构与算法|MySQL| 💫个人格言:“没有罗马,那就自己创造罗马~” 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不…...

kafka2.x版本配置SSL进行加密和身份验证
背景:找了一圈资料,都是东讲讲西讲讲,最后我还没搞好,最终决定参考官网说明。 官网指导手册地址:Apache Kafka 需要预备的知识,keytool和openssl 关于keytool的参考:keytool的使用-CSDN博客 …...
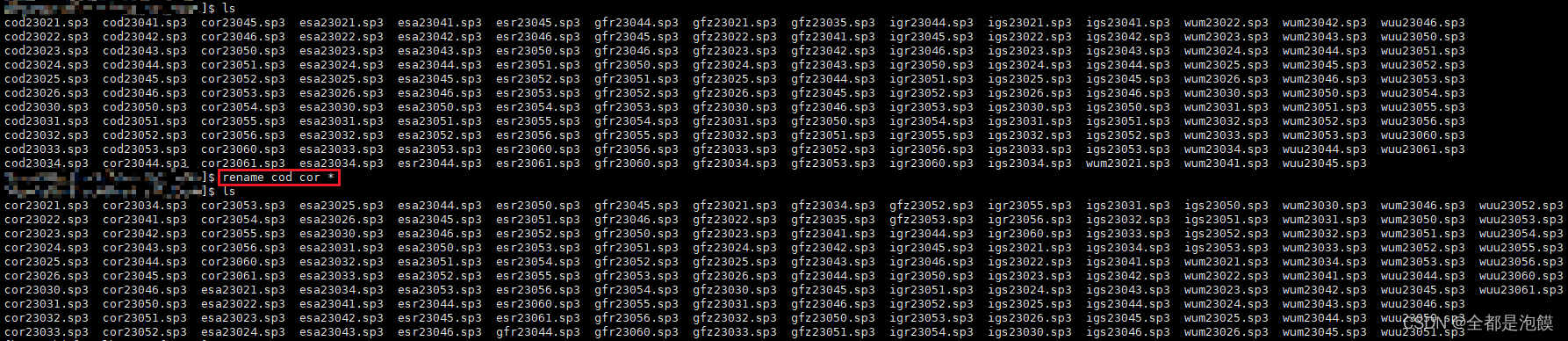
Linux和Windows下的文件批量重命名
一、Linux下文件批量重命名 rename命令说明: Usage: rename [options] … Rename files. Options: -v, --verbose explain what is being done -s, --symlink act on the target of symlinks -n, --no-act do not make any changes -o, --no-overwrite don’t overw…...
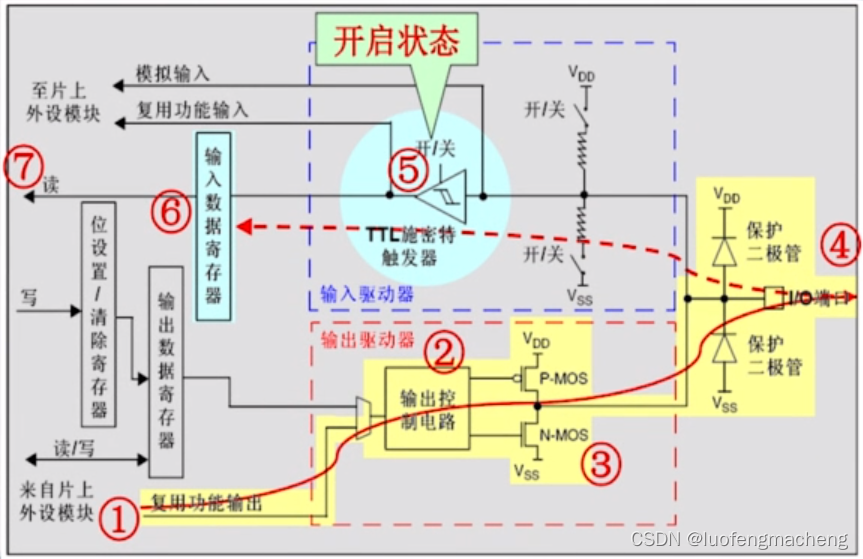
stm32之GPIO电路介绍
文章目录 1 GPIO介绍2 GPIO的工作模式2.1 浮空输入2.2 上拉输入2.3 下拉输入2.4 模拟输入2.5 开漏输出2.6 推挽输出2.7 复用开漏输出2.8 复用推挽输出2.9 其他 3 应用方式4 常用库函数 1 GPIO介绍 保护二极管:保护引脚,让引脚的电压位于正常的范围施密特…...
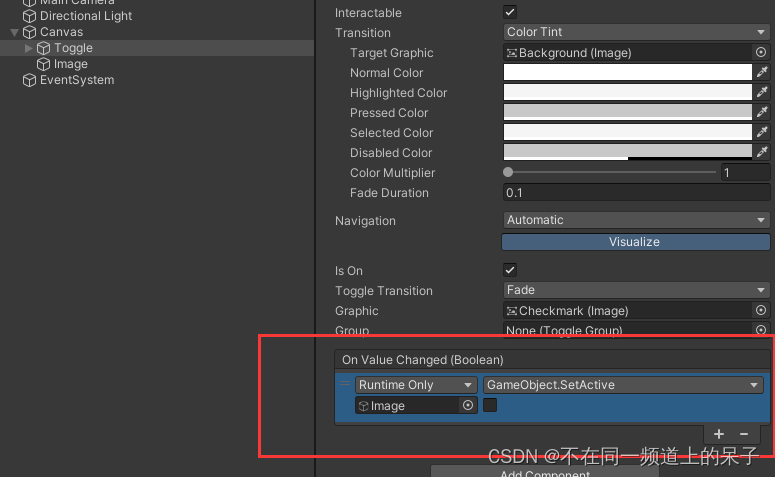
Unity Toggle处理状态变化事件
Toggle处理状态变化事件,有两个方法。 法一、通过Inspector面板设置 实现步骤: 在Inspector面板中找到Toggle组件的"On Value Changed"事件。单击""按钮添加一个新的监听器。拖动一个目标对象到"None (Object)"字段&am…...

UE5.1 iClone8 正确导入角色骨骼与动作
使用iClone8插件Auto Setup 附录下载链接 里面有两个文件夹,使用Auto Setup C:\Program Files\Reallusion\Shared Plugins 在UE内新建Plugins,把插件复制进去 在工具栏出现这三个人物的图标就安装成功了 iClone选择角色,导入动作 选择导出FBX UE内直接导入 会出现是否启动插件…...

FFmpeg-- c++实现:pcm和yuv编码
文章目录 流程音频视频 api核心代码audioencoder.haudioencoder.cppvideoencoder.hvideoencoder.cpp pcm和yuv编码为aac和h264,封装为c的AudioEncoder类和VideoEncoder类 流程 音频 初始化音频参数 int InitAAC(int channels, int sample_rate, int bit_rate); 音…...

图解CodeWhisperer的安装使用
🎬 江城开朗的豌豆:个人主页 🔥 个人专栏 :《 VUE 》 《 javaScript 》 📝 个人网站 :《 江城开朗的豌豆🫛 》 ⛺️ 生活的理想,就是为了理想的生活 ! 目录 📘 CodeWhisperer简介 &#…...
Python内置对象
Python是一种强大的、动态类型的高级编程语言,其内置对象是构成程序的基础元素。Python的内置对象包括数字、字符串、列表、元组、字典、集合、布尔值和None等,每种对象都有特定的类型和用途。 01 什么是内置对象 这些对象是编程语言的基础构建块&…...
开源数据集 nuScenes 之 3D Occupancy Prediction
数据总体结构 Nuscenes 数据结构 可以看一下我的blog如何下载完整版 mmdetection3d ├── mmdet3d ├── tools ├── configs ├── data │ ├── nuscenes │ │ ├── maps │ │ ├── samples │ │ ├── sweeps │ │ ├── lidarseg (o…...

物联网竞赛板CubMx全部功能简洁配置汇总
目录 前言:1、按键&LED灯配置:2、OLED配置:3、继电器配置:4、LORA模块配置:5、矩阵模块:6、串口模块:7、RTC配置:8、ADC模块配置:9、温度传感器模块:后续…...
使用Redis做缓存的小案例
如果不了解Redis,可以查看本人博客:Redis入门 Redis基于内存,因此查询速度快,常常可以用来作为缓存使用,缓存就是我们在内存中开辟一段区域来存储我们查询比较频繁的数据,这样,我们在下一次查询…...
剧本杀小程序功能介绍
剧本杀功能介绍 剧本杀,一种融合了角色扮演与推理解谜的社交游戏,近年来在年轻人中越来越受欢迎。它不仅可以锻炼参与者的逻辑推理能力,还能增进朋友间的感情,提升团队协作能力。下面,我们将详细介绍剧本杀的核心功能…...
快速定位PCB上的开路和短路)
告别盲人摸象:手把手教你用TDR(时域反射技术)快速定位PCB上的开路和短路
告别盲人摸象:手把手教你用TDR(时域反射技术)快速定位PCB上的开路和短路 在电子工程领域,PCB故障排查常常像一场没有地图的寻宝游戏。当一块价值不菲的多层板出现信号传输异常时,传统方法往往需要工程师像"盲人摸…...
)
Linux根目录扫盲:从/bin到/var,每个文件夹都是干嘛的?(附KDE桌面文件管理器实操)
Linux根目录探险指南:在KDE桌面中理解每个文件夹的使命 刚接触Linux的用户第一次打开文件管理器时,往往会被根目录下那一堆神秘的文件夹搞得一头雾水。这些看似随意的缩写背后,其实隐藏着Linux系统精心设计的组织逻辑。今天,我们就…...

哔哩下载姬终极指南:3步快速掌握B站视频高效下载技巧
哔哩下载姬终极指南:3步快速掌握B站视频高效下载技巧 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等&#x…...

iperf3 UDP/TCP混合压测避坑指南:在嵌入式Linux上如何准确评估多网口性能
iperf3 UDP/TCP混合压测实战:嵌入式Linux多网口性能评估的深度解析 当你在嵌入式Linux设备上部署多网口应用时,是否遇到过这样的困惑:单个网口的性能测试结果很漂亮,但实际运行中多个网口同时传输视频流和控制数据时,…...

别再只调包了!深入理解Acoular库背后:麦克风阵列定位的波束形成与CLEAN-SC算法
从调包到造轮子:Acoular库中的波束形成算法深度解析与工程实践 当你第一次在Python中导入Acoular库,运行demo示例并看到声源定位结果时,那种成就感可能让你误以为已经掌握了麦克风阵列技术的精髓。但当你试图修改参数或更换算法时,…...

Qianfan-OCR实战案例:单模型替代传统OCR+版面分析流水线
Qianfan-OCR实战案例:单模型替代传统OCR版面分析流水线 1. 项目概述 Qianfan-OCR是百度千帆推出的开源端到端文档智能多模态模型,基于4B参数的Qwen3-4B语言模型构建。这个多模态视觉语言模型(VLM)采用Apache 2.0协议开源,支持商用和微调&am…...

BUUCTF [ACTF2020 新生赛]BackupFile1
1.了解主题题目标题是BackupFile(备份文件),由此可以得知,这道题与备份文件有关。首我尝试使用dirsearch对靶机进行了各种压缩包格式(zip rar jar 7z tar)的文件扫描,没有扫描出来东西…...

二叉树的遍历和线索二叉树--中序线索二叉树的构造
一、为什么要用线索二叉树 普通二叉链表: - n 个结点,一共2n 个指针域 - 真正指向孩子的指针只有 n-1 个 - 剩余 n1 个空指针,空间浪费解决办法: 利用空左、空右指针,存放中序遍历的前驱、后继结点 加上标记位区分&…...

如何处理SQL查询中的逻辑重叠:AND OR嵌套优先级.txt
<details> 中 <summary> 必须是第一个直接子元素,不可嵌套或包裹在其他标签内;支持默认展开(open 布尔属性)、JS 控制(el.open false)、toggle 事件监听;兼容性需注意 IE 不支持&a…...

华为OD机试真题 新系统 2026-04-19 PythonJS 实现【8位LED控制器】
目录 题目 思路 Code 题目 有一个8位LED控制器,包含8个LED灯(编号0-7),初始状态全灭,用8位二进制表示为:00000000。控制器可以接收以下三种指令: Lx:L表示点亮操作,x表示LED的编号(0一7),操作得到的结果是:点亮第x个…...