Orbit 使用指南 10|在机器人上安装传感器 | Isaac Sim | Omniverse
如是我闻: 资产类(asset classes)允许我们创建和模拟机器人,而传感器 (sensors) 则帮助我们获取关于环境的信息,获取不同的本体感知和外界感知信息。例如,摄像头传感器可用于获取环境的视觉信息,接触传感器可以用来获取机器人与环境的接触信息。
在本指南中,我们将看到如何给机器人添加不同的传感器。我们将在本指南中使用ANYmal-C机器人。ANYmal-C是一款四足机器人,拥有12个自由度,它有4条腿,每条腿有3个自由度。这款机器人配备了以下传感器:
- 机器人头部的摄像头传感器,提供RGB-D图像
- 提供地形高度信息的高度扫描传感器
- 机器人脚部的接触传感器,提供接触信息
本指南对应于orbit/source/standalone/tutorials/04_sensors目录下的add_sensors_on_robot.py脚本。让我们先搂一眼完整的代码
# Copyright (c) 2022-2024, The ORBIT Project Developers.
# All rights reserved.
#
# SPDX-License-Identifier: BSD-3-Clause"""
This script demonstrates how to add and simulate on-board sensors for a robot.We add the following sensors on the quadruped robot, ANYmal-C (ANYbotics):* USD-Camera: This is a camera sensor that is attached to the robot's base.
* Height Scanner: This is a height scanner sensor that is attached to the robot's base.
* Contact Sensor: This is a contact sensor that is attached to the robot's feet... code-block:: bash# Usage./orbit.sh -p source/standalone/tutorials/04_sensors/add_sensors_on_robot.py"""from __future__ import annotations"""Launch Isaac Sim Simulator first."""import argparsefrom omni.isaac.orbit.app import AppLauncher# add argparse arguments
parser = argparse.ArgumentParser(description="Tutorial on adding sensors on a robot.")
parser.add_argument("--num_envs", type=int, default=2, help="Number of environments to spawn.")
# append AppLauncher cli args
AppLauncher.add_app_launcher_args(parser)
# parse the arguments
args_cli = parser.parse_args()# launch omniverse app
app_launcher = AppLauncher(args_cli)
simulation_app = app_launcher.app"""Rest everything follows."""import torch
import tracebackimport carbimport omni.isaac.orbit.sim as sim_utils
from omni.isaac.orbit.assets import ArticulationCfg, AssetBaseCfg
from omni.isaac.orbit.scene import InteractiveScene, InteractiveSceneCfg
from omni.isaac.orbit.sensors import CameraCfg, ContactSensorCfg, RayCasterCfg, patterns
from omni.isaac.orbit.utils import configclass##
# Pre-defined configs
##
from omni.isaac.orbit_assets.anymal import ANYMAL_C_CFG # isort: skip@configclass
class SensorsSceneCfg(InteractiveSceneCfg):"""Design the scene with sensors on the robot."""# ground planeground = AssetBaseCfg(prim_path="/World/defaultGroundPlane", spawn=sim_utils.GroundPlaneCfg())# lightsdome_light = AssetBaseCfg(prim_path="/World/Light", spawn=sim_utils.DomeLightCfg(intensity=3000.0, color=(0.75, 0.75, 0.75)))# robotrobot: ArticulationCfg = ANYMAL_C_CFG.replace(prim_path="{ENV_REGEX_NS}/Robot")# sensorscamera = CameraCfg(prim_path="{ENV_REGEX_NS}/Robot/base/front_cam",update_period=0.1,height=480,width=640,data_types=["rgb", "distance_to_image_plane"],spawn=sim_utils.PinholeCameraCfg(focal_length=24.0, focus_distance=400.0, horizontal_aperture=20.955, clipping_range=(0.1, 1.0e5)),offset=CameraCfg.OffsetCfg(pos=(0.510, 0.0, 0.015), rot=(0.5, -0.5, 0.5, -0.5), convention="ros"),)height_scanner = RayCasterCfg(prim_path="{ENV_REGEX_NS}/Robot/base",update_period=0.02,offset=RayCasterCfg.OffsetCfg(pos=(0.0, 0.0, 20.0)),attach_yaw_only=True,pattern_cfg=patterns.GridPatternCfg(resolution=0.1, size=[1.6, 1.0]),debug_vis=True,mesh_prim_paths=["/World/defaultGroundPlane"],)contact_forces = ContactSensorCfg(prim_path="{ENV_REGEX_NS}/Robot/.*_FOOT", update_period=0.0, history_length=6, debug_vis=True)def run_simulator(sim: sim_utils.SimulationContext,scene: InteractiveScene,
):"""Run the simulator."""# Define simulation steppingsim_dt = sim.get_physics_dt()sim_time = 0.0count = 0# Simulate physicswhile simulation_app.is_running():# Resetif count % 500 == 0:# reset countercount = 0# reset the scene entities# root state# we offset the root state by the origin since the states are written in simulation world frame# if this is not done, then the robots will be spawned at the (0, 0, 0) of the simulation worldroot_state = scene["robot"].data.default_root_state.clone()root_state[:, :3] += scene.env_originsscene["robot"].write_root_state_to_sim(root_state)# set joint positions with some noisejoint_pos, joint_vel = (scene["robot"].data.default_joint_pos.clone(),scene["robot"].data.default_joint_vel.clone(),)joint_pos += torch.rand_like(joint_pos) * 0.1scene["robot"].write_joint_state_to_sim(joint_pos, joint_vel)# clear internal buffersscene.reset()print("[INFO]: Resetting robot state...")# Apply default actions to the robot# -- generate actions/commandstargets = scene["robot"].data.default_joint_pos# -- apply action to the robotscene["robot"].set_joint_position_target(targets)# -- write data to simscene.write_data_to_sim()# perform stepsim.step()# update sim-timesim_time += sim_dtcount += 1# update buffersscene.update(sim_dt)# print information from the sensorsprint("-------------------------------")print(scene["camera"])print("Received shape of rgb image: ", scene["camera"].data.output["rgb"].shape)print("Received shape of depth image: ", scene["camera"].data.output["distance_to_image_plane"].shape)print("-------------------------------")print(scene["height_scanner"])print("Received max height value: ", torch.max(scene["height_scanner"].data.ray_hits_w[..., -1]).item())print("-------------------------------")print(scene["contact_forces"])print("Received max contact force of: ", torch.max(scene["contact_forces"].data.net_forces_w).item())def main():"""Main function."""# Initialize the simulation contextsim_cfg = sim_utils.SimulationCfg(dt=0.005, substeps=1)sim = sim_utils.SimulationContext(sim_cfg)# Set main camerasim.set_camera_view(eye=[3.5, 3.5, 3.5], target=[0.0, 0.0, 0.0])# design scenescene_cfg = SensorsSceneCfg(num_envs=args_cli.num_envs, env_spacing=2.0)scene = InteractiveScene(scene_cfg)# Play the simulatorsim.reset()# Now we are ready!print("[INFO]: Setup complete...")# Run the simulatorrun_simulator(sim, scene)if __name__ == "__main__":try:# run the main executionmain()except Exception as err:carb.log_error(err)carb.log_error(traceback.format_exc())raisefinally:# close sim appsimulation_app.close()
代码解析
与之前我们在场景中添加资产的教程类似,传感器也是通过场景配置添加到场景中的。所有的传感器都继承自sensors.SensorBase类,并通过各自的配置类进行配置。每个传感器实例都可以定义自己的更新周期,即传感器更新的频率。更新周期通过sensors.SensorBaseCfg.update_period属性以秒为单位指定。
根据指定的路径和传感器类型,传感器会被附加到场景中的原始图元(prims)上。传感器可能直接和在场景中已创建的原始图元关联,或者可能被附加到一个已存在的原始图元上。例如,摄像头传感器会附加在一个已经创建好的原始图元上,而对于接触传感器,激活中的接触报告是刚体原始图元上的一个属性。
接下来,我们将介绍如何使用不同的传感器以及如何配置。要了解更多关于它们的描述,请查看sensors模块。
摄像头传感器 (Camera sensor)
摄像头是使用sensors.CameraCfg类来定义的。它基于USD摄像头传感器,不同的数据类型由Omniverse Replicator API来捕获。由于摄像头在场景中有对应的原始图元(prim),所以在指定的原始图元路径上会创建原始图元。
摄像头传感器的配置包括以下参数:
-
spawn:创建的USD摄像头类型。可以是PinholeCameraCfg(针孔摄像头配置)或FisheyeCameraCfg(鱼眼摄像头配置)。 -
offset:摄像头传感器相对于父原始图元的偏移。 -
data_types:要捕获的数据类型。可以是rgb、distance_to_image_plane(到图像平面的距离)、normals(法线)或其他USD摄像头传感器支持的类型。
为了将RGB-D摄像头传感器附加到机器人的头部,我们指定了一个相对于机器人基座的偏移(offset)。偏移是相对于基座指定的平移和旋转,以及偏移的指定方式。
接下来,我们来看如何使用摄像头传感器配置。我们将更新周期设置为0.1秒,这意味着摄像头传感器以10Hz的频率更新。原始图元路径表达式设置为{ENV_REGEX_NS}/Robot/base/front_cam,其中{ENV_REGEX_NS}是环境命名空间,"Robot"是机器人的名称,"base"是摄像头附加的原始图元的名称,而"front_cam"是与摄像头传感器关联的原始图元的名称。
高度扫描仪(scanner)
高度扫描仪作为一种虚拟传感器,通过使用NVIDIA Warp的光线投射内核来实现。通过sensors.RayCasterCfg,我们可以指定要投射的光线模式以及要对哪些网格进行光线投射。由于它们是虚拟传感器,在场景中没有相应的原始物体(prims)被创建。相反,它们附加到场景中的一个原始物体上,这用于指定传感器的位置。
在本指南中,基于光线投射的高度扫描仪附加到机器人的基座上。光线的模式使用pattern属性指定。对于均匀网格模式,我们使用GridPatternCfg指定模式。由于我们只关心高度信息,我们不需要考虑机器人的滚转和俯仰。因此,我们将attach_yaw_only设置为true。
对于高度扫描仪,我们可以可视化光线击中网格的点。这是通过将debug_vis属性设置为true来完成的。
高度扫描仪的整个配置如下:
height_scanner = RayCasterCfg(prim_path="{ENV_REGEX_NS}/Robot/base",update_period=0.02,offset=RayCasterCfg.OffsetCfg(pos=(0.0, 0.0, 20.0)),attach_yaw_only=True,pattern_cfg=patterns.GridPatternCfg(resolution=0.1, size=[1.6, 1.0]),debug_vis=True,mesh_prim_paths=["/World/defaultGroundPlane"],)
接触传感器 (Contact sensor)
接触传感器利用PhysX的接触报告API来获取机器人与环境的接触信息。由于它依赖于PhysX,接触传感器期望在机器人的刚体上启用接触报告API。这可以通过在资产配置中设置activate_contact_sensors为true来完成。
通过sensors.ContactSensorCfg,可以指定我们想要获取接触信息的原始物体(prims)。可以设置额外的标志以获取更多关于接触的信息,例如接触空中时间、过滤原始物体之间的接触力等。
在本指南中,我们将接触传感器附加到机器人的脚上。机器人的脚被命名为"LF_FOOT"、“RF_FOOT”、“LH_FOOT"和"RF_FOOT”。我们传递一个正则表达式".*_FOOT"来简化原始物体路径的指定。这个正则表达式匹配所有以"_FOOT"结尾的原始物体。
我们将更新周期设置为0,以使传感器与模拟以相同的频率更新。此外,对于接触传感器,我们可以指定要存储的接触信息的历史长度。对于这个教程,我们将历史长度设置为6,这意味着存储了最后6个模拟步骤的接触信息。
接触传感器的整个配置如下:
contact_forces = ContactSensorCfg(prim_path="{ENV_REGEX_NS}/Robot/.*_FOOT", update_period=0.0, history_length=6, debug_vis=True)
运行模拟循环
与使用资产时相似,传感器的缓冲区和物理句柄只有在播放模拟时才会初始化,即,在创建场景后调用sim.reset()是很重要的。
# Play the simulatorsim.reset()
除此之外,模拟循环与之前的指南类似。传感器作为场景更新的一部分进行更新,它们内部处理基于它们更新周期的缓冲区更新。
可以通过它们的data属性访问传感器的数据。作为示例,我们展示如何访问本教程中创建的不同传感器的数据:
# print information from the sensorsprint("-------------------------------")print(scene["camera"])print("Received shape of rgb image: ", scene["camera"].data.output["rgb"].shape)print("Received shape of depth image: ", scene["camera"].data.output["distance_to_image_plane"].shape)print("-------------------------------")print(scene["height_scanner"])print("Received max height value: ", torch.max(scene["height_scanner"].data.ray_hits_w[..., -1]).item())print("-------------------------------")print(scene["contact_forces"])print("Received max contact force of: ", torch.max(scene["contact_forces"].data.net_forces_w).item())
代码运行
现在让我们运行脚本并查看结果:
./orbit.sh -p source/standalone/tutorials/04_sensors/add_sensors_on_robot.py --num_envs 2

这个命令应该会打开一个带有地面平面、灯光和两个四足机器人的舞台。在机器人周围,应该会看到红色的球体,这些球体表示光线击中网格的点。另外,你可以切换视口到摄像机视图,以查看摄像头传感器捕获的RGB图像。请查看这里以了解如何切换视口到摄像机视图的更多信息。
要停止模拟,可以关闭窗口,或在终端中按Ctrl+C。
虽然在这个教程中,我们讲解了创建和使用不同的传感器,但在sensors模块中还有许多其他传感器可用。我们在source/standalone/tutorials/04_sensors目录中包含了使用这些传感器的示例。这些脚本可以使用以下命令运行:
# Frame Transformer
./orbit.sh -p source/standalone/tutorials/04_sensors/run_frame_transformer.py# Ray Caster
./orbit.sh -p source/standalone/tutorials/04_sensors/run_ray_caster.py# Ray Caster Camera
./orbit.sh -p source/standalone/tutorials/04_sensors/run_ray_caster_camera.py# USD Camera
./orbit.sh -p source/standalone/tutorials/04_sensors/run_usd_camera.py
愿本文除一切机器人模拟器苦
以上
相关文章:
Orbit 使用指南 10|在机器人上安装传感器 | Isaac Sim | Omniverse
如是我闻: 资产类(asset classes)允许我们创建和模拟机器人,而传感器 (sensors) 则帮助我们获取关于环境的信息,获取不同的本体感知和外界感知信息。例如,摄像头传感器可用于获取环境的视觉信息,…...

GPT系列模型的特点
GPT系列模型(包括GPT-1、GPT-2和GPT-3)都基于自回归机制的Transformer架构。在设计上,这些模型的核心思想是利用Transformer架构来捕捉整个序列的上下文信息,通过其独特的自回归机制逐步地整合整个序列的完整语义。GPT系列模型的设…...

Oracle Data Guard常用命令
--查询数据库角色和保护模式 select database_role,switchover_status from v$database; --切换备库为主库(切换后,主库为mount状态) --TO PRIMARY alter database commit to switchover to primary; --SESSIONS ACTIVE alter database comm…...
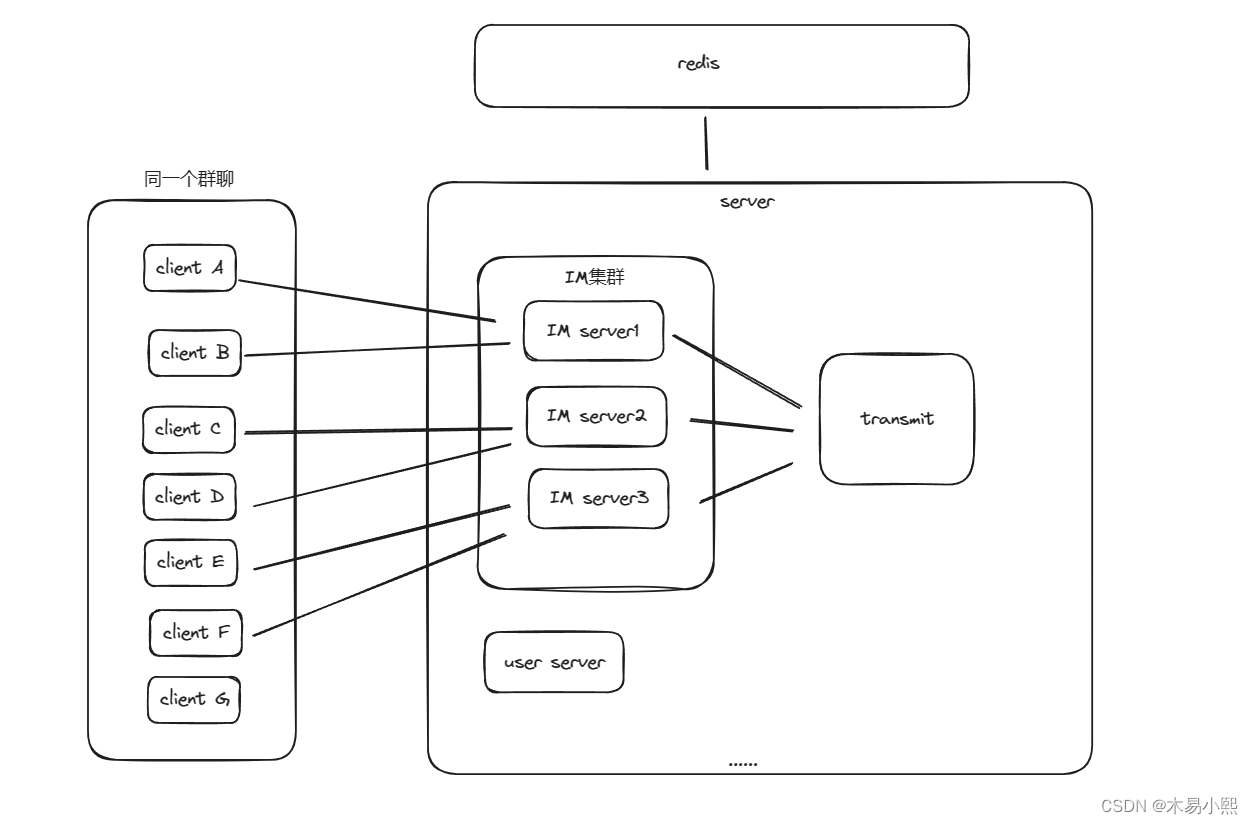
IM系统设计之websocket消息转发
Websocket消息转发 项目地址:gitgithub.com:muyixiaoxi/Link.git 上周面试被面试官问到:“在分布式IM系统中,如何实现多个websocket集群之间的通信”。 我在思考了良久后回答:“不会”。 随着我的回答,我和面试官的…...

关于vue 的生命周期的教程
Vue.js 是一款流行的前端框架,它提供了丰富的功能和便捷的开发式, 其中生命周期函数是 Vue 组件中非常重要的一部分。 本文将为您详细介绍 Vue 组件的生命周期函数及其执行顺序, 帮助您更好地理解和利用 Vue.js 框架。 什么是 Vue 生命周期 …...

STM32 CAN的工作模式
STM32 CAN的工作模式 正常模式 正常模式下就是一个正常的CAN节点,可以向总线发送数据和接收数据。 静默模式 静默模式下,它自己的输出端的逻辑0数据会直接传输到它自己的输入端,逻辑1可以被发送到总线,所以它不能向总线发送显性…...

Java中的常用类之Math类
Java中的Math类 一、Math类是什么?二、主要方法1.随机数2.绝对值3.向上取值4.向下取值5.四舍五入6.两个值中取大/小的 总结 一、Math类是什么? Math类是Java常用类的一种,主要方法针对于数学方面的运算,类中的所有方法都是static…...

Android冷启动优化
一、应用启动的三种状态 冷启动:系统不存在App进程(APP首次启动或APP被完全杀死)时启动APP,此时,APP的启动将经历两个阶段: 1、创建app进程:系统启动应用程序进程和虚拟机,创建app…...
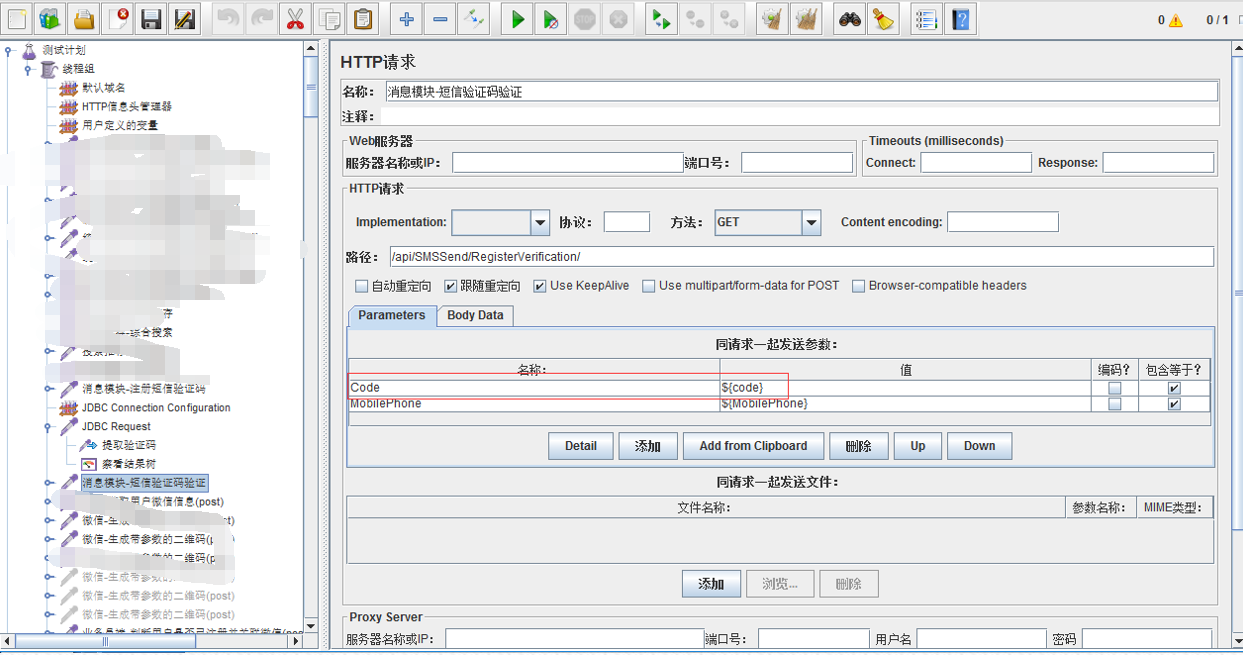
jmeter之接口功能自动化
一、接口测试简述 接口:用来连接前端,后端还有移动端的程序模块。由于不同端的工作进度不一样,需要对最开始出来的接口进行接口测试。 接口分类:POST,GET,PUT,DELETE。 POST请求的数据是放在…...

【openGL4.x手册07】几何着色器
目录 一、说明二、关于几何着色器三、原始输入/输出规范3.1 实例 四、输入五、输出5.1 分层渲染 六、输出限制 一、说明 几何着色器对于渲染管线设计是一个新生事物;目前对应于几何着色器的资料不多,并且说法不一,因此如何用几何着色器&…...
鸿蒙OpenHarmony开发实战:【MiniCanvas】
介绍 基于OpenHarmony的Cavas组件封装了一版极简操作的MiniCanvas,屏蔽了原有Canvas内部复杂的调用流程,支持一个API就可以实现相应的绘制能力,该库还在继续完善中,也欢迎PR。 使用说明 添加MiniCanvas依赖 在项目entry目录执行…...
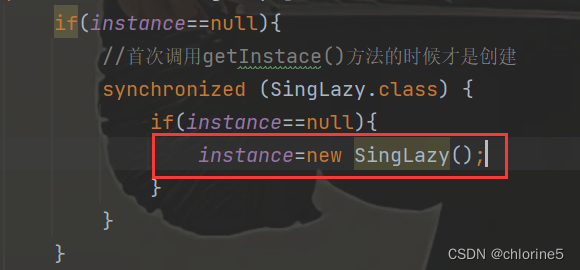
【JavaEE初阶系列】——单例模式 (“饿汉模式“和“懒汉模式“以及解决线程安全问题)
目录 🚩单例模式 🎈饿汉模式 🎈懒汉模式 ❗线程安全问题 📝加锁 📝执行效率提高 📝指令重排序 🍭总结 单例模式,非常经典的设计模式,也是一个重要的学科&#x…...

flutter-elinux的基本介绍及安装调试
搜集到两个很有用的网站: 1、flutter-elinux的基本介绍:https://juejin.cn/post/7257285697383612453 2、flutter-elinux的安装调试等:https://github.com/sony/flutter-elinux/wiki 其中,在flutter-elinux设置环境变量时&#…...

二分查找法总结
目录 1、思路讲解(LC704)2、代码思路讲解(循环不变量)(1) 左闭右闭(2)左闭右开(3)总结:左开右闭和左闭右开(4)复杂度分析 …...

Python工具-清理Unity(批量深度)清理U3D项目工程保留关键工程文件
前沿 1. Unity工程越来越多,很久不用的工程里存在了很多无用的大文件夹,极大的影响电脑容量。 2. 我电脑里面U3D工程只有17个,但容量就高达60GB,使用自己编写的工具清理后,减到了30GB多。清理了不是很重要的文件和文件…...
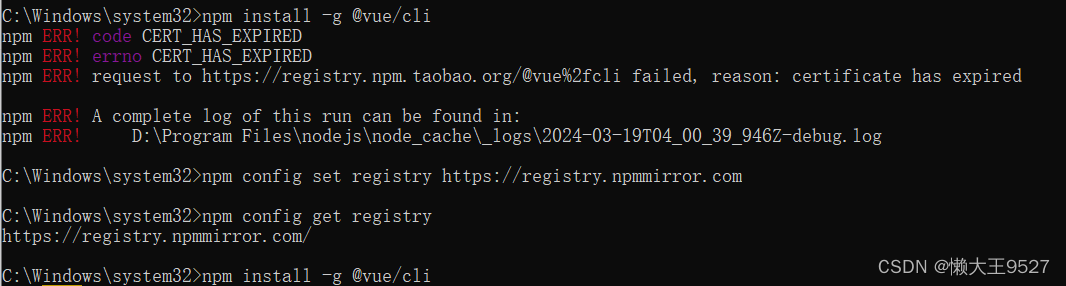
vue 安装脚手架报错 certificate has expired
vue 安装脚手架的时候报错,报错信息如下: 错误信息:npm ERR! request to https://registry.npm.taobao.org/vue%2fcli failed, reason: certificate has expired 翻译:npm ERR!请求到https://registry.npm.taobao.org…...

使用 Python 快速开始机器学习
🔗 快速开始 PyTorch|使用 Python 建立深度学习模型 认识 PyTorch 1.1 Torch 与 PyTorch 1.2 安装 PyTorch 1.3 验证安装并查看 PyTorch 版本PyTorch 深度学习模型的建立范式 2.1 准备数据 2.2 定义模型 2.3 训练模型 2.4 评估模型 2.5 做出预测为预测任…...
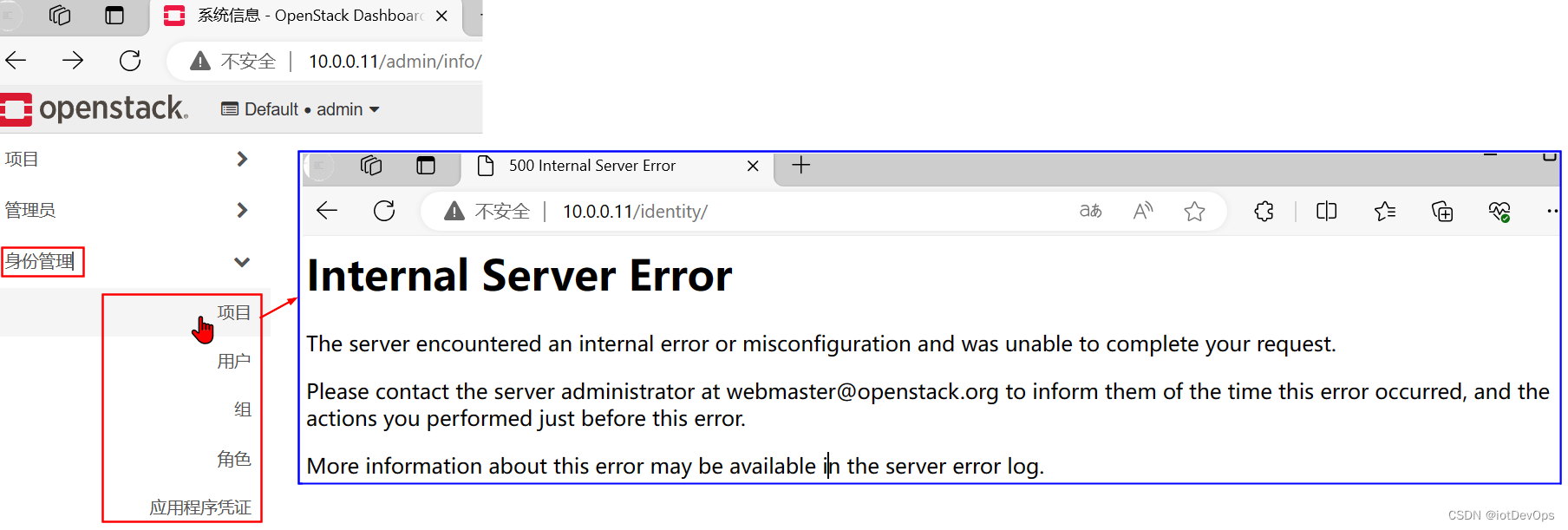
CCDP.02.OS正确部署后的Dashboard摘图说明
前言 在部署成功OpenStack后,应该可以在浏览器打开Dashboard,并对计算资源(这里主要是指VM)进行管理,也可以在Dashboard上面查看OpenStack是否存在错误,下面,已针对检查的关键点,用红…...
【计算机视觉】Gaussian Splatting源码解读补充(二)
第一部分 本文是对学习笔记之——3D Gaussian Splatting源码解读的补充,并订正了一些错误。 目录 三、相机相关scene/cameras.py:class Camera 四、前向传播(渲染):submodules/diff-gaussian-rasterization/cuda_rast…...
Java transient 关键字
Java字段不想序列化怎么办 在 Java 中,如果某个字段不想被序列化(即不希望被写入到序列化的数据流中),可以使用 transient 关键字进行标记。通过在字段前加上 transient 关键字,可以告诉 Java 序列化机制忽略该字段&am…...
)
Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析)
更多请点击: https://intelliparadigm.com 第一章:Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析) 自2024年V6.2版本起,大量用户反馈 --stylize 与 --sharp 参数组合下图像边缘锐化效果显著弱化&am…...

写论文的神助攻!好用的AI写作辅助软件,逻辑清晰质量高
作为一名刚完成毕业论文的过来人,我太懂写论文的痛苦了 —— 选题迷茫、文献浩如烟海、框架混乱、逻辑不清、反复修改、查重降重反复折腾... 直到我发现了这套 AI 写作工具组合,简直是论文写作的 "开挂神器",效率直接拉满ÿ…...

2026智慧校园规划必读:如何在预算吃紧下选到高性价比方案
✅作者简介:合肥自友科技 📌核心产品:智慧校园平台(包括教工管理、学工管理、教务管理、考务管理、后勤管理、德育管理、资产管理、公寓管理、实习管理、就业管理、离校管理、科研平台、档案管理、学生平台等26个子平台) 。公司所有人员均有多…...

Unity发行版DLL调试实战:DnSpy无源码IL级断点指南
1. 这不是“反编译”,而是Unity游戏开发者的日常调试手段你有没有遇到过这样的情况:接手一个Unity发行版游戏,想快速验证某个功能逻辑是否按预期执行,或者排查一个偶发的崩溃,但手头只有打包后的Assembly-CSharp.dll&a…...

Windows Cleaner深度解析:5大核心模块彻底解决系统空间不足问题
Windows Cleaner深度解析:5大核心模块彻底解决系统空间不足问题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner Windows Cleaner是一款完全免费开源的…...
)
Claude端到端测试设计终极清单:覆盖17类非功能需求(含延迟敏感度分级、幻觉熔断阈值、多轮对话状态持久化验证)
更多请点击: https://kaifayun.com 第一章:Claude端到端测试设计的演进逻辑与核心范式 Claude端到端测试并非静态产物,而是随模型能力边界拓展、交互场景复杂化及可靠性要求升级而持续演化的工程实践。其演进逻辑根植于三个关键张力…...

告别手动预约:i茅台自动预约系统5分钟部署指南
告别手动预约:i茅台自动预约系统5分钟部署指南 【免费下载链接】campus-imaotai i茅台app自动预约,每日自动预约,支持docker一键部署(本项目不提供成品,使用的是已淘汰的算法) 项目地址: https://gitcode…...

Driver Store Explorer终极指南:轻松管理Windows驱动存储区,释放宝贵磁盘空间
Driver Store Explorer终极指南:轻松管理Windows驱动存储区,释放宝贵磁盘空间 【免费下载链接】DriverStoreExplorer Driver Store Explorer 项目地址: https://gitcode.com/gh_mirrors/dr/DriverStoreExplorer 你是否曾为Windows系统越来越慢而烦…...

CentOS 8/Stream 8系统DNF换源后,安装软件还是慢?试试这几个排查命令和优化技巧
CentOS 8/Stream 8系统DNF换源后安装缓慢的深度排查与优化指南当你已经按照教程将CentOS 8/Stream 8的DNF源切换为国内镜像,却发现软件安装速度依然不尽如人意时,这种体验确实令人沮丧。作为长期使用CentOS系统的技术专家,我完全理解这种&quo…...

深入解析NxDumpTool:Switch游戏文件系统提取的终极指南 [特殊字符]
深入解析NxDumpTool:Switch游戏文件系统提取的终极指南 🎮 【免费下载链接】nxdumptool Generates XCI/NSP/HFS0/ExeFS/RomFS/Certificate/Ticket dumps from Nintendo Switch gamecards and installed SD/eMMC titles. 项目地址: https://gitcode.com…...