maya打开bvh脚本
目录
maya打开脚本编辑器
运行打开bvh脚本
maya导出bvh脚本
maya打开脚本编辑器
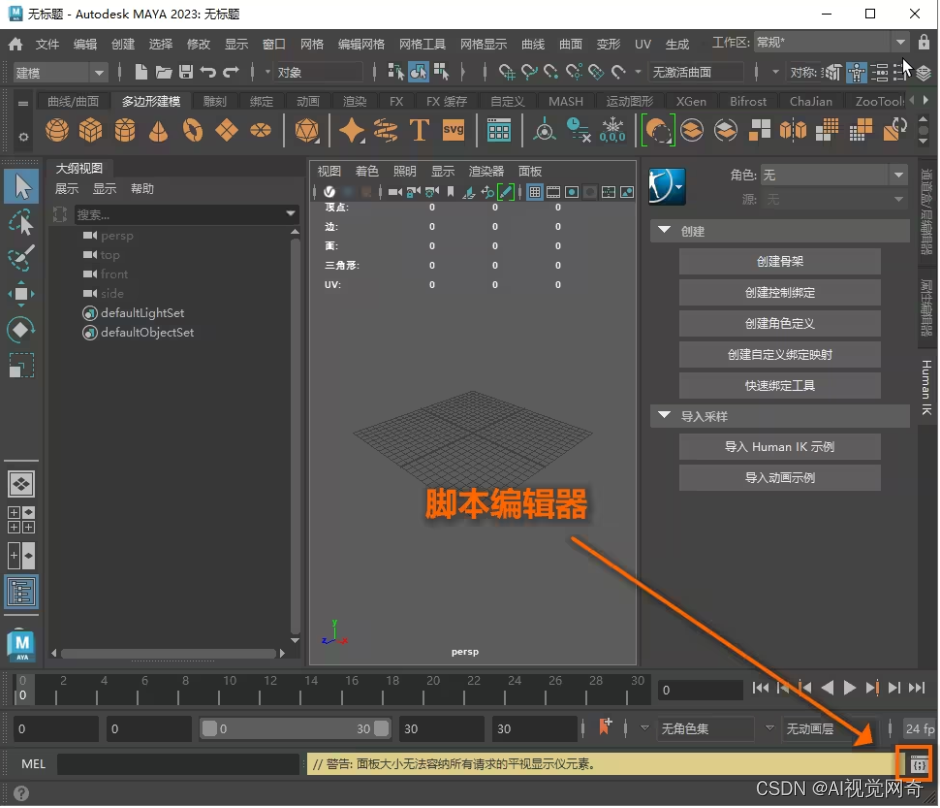
打开Maya软件,点击右下角 “脚本编辑器”
运行打开bvh脚本
https://github.com/jhoolmans/mayaImporterBVH/blob/master/bvh_importer.py
import os
import re
from typing import Optionalimport maya.cmds as mcspace_re = re.compile(r"\s+")# This maps the BVH naming convention to Maya
translationDict = {"Xposition": "translateX","Yposition": "translateY","Zposition": "translateZ","Xrotation": "rotateX","Yrotation": "rotateY","Zrotation": "rotateZ"
}class TinyDAG(object):"""Tiny DAG class for storing the hierarchy of the BVH file."""def __init__(self, obj: str, parent: Optional["TinyDAG"] = None):"""Constructor"""self.obj = objself.__parent = parent@propertydef parent(self):"""Returns the parent of the object"""return self.__parentdef __str__(self) -> str:"""String representation of the object"""return str(self.obj)def full_path(self) -> str:"""Returns the full path of the object"""if self.parent is not None:return "%s|%s" % (self.parent.full_path(), str(self))return str(self.obj)class BVHImporterDialog(object):"""BVH Importer DialogThis class is the main dialog for the BVH importer."""def __init__(self, debug=False):self._name = "bvhImportDialog"self._title = "BVH Importer v2.0"if debug:print("Debug is deprecated.")# UI relatedself._textfield = ""self._scale_field = ""self._frame_field = ""self._rotation_order = ""self._reload = ""# Otherself._root_node = None # Used for targeting# BVH specific stuffself._filename = ""self._channels = []self.setup_ui()def setup_ui(self):"""Builds the UI"""win = self._nameif mc.window(win, ex=True):mc.deleteUI(win)# Non sizeable dialogwin = mc.window(self._name, title=self._title, w=200, rtf=True,sizeable=False)mc.columnLayout(adj=1, rs=5)mc.separator()mc.text("Options")mc.separator()mc.rowColumnLayout(numberOfColumns=2,columnWidth=[(1, 80), (2, 150)],cal=[(1, "right"), (2, "center")],cs=[(1, 5), (2, 5)],rs=[(1, 5), (2, 5)])mc.text("Rig scale")self._scale_field = mc.floatField(minValue=0.01, maxValue=2, value=1)mc.text("Frame offset")self._frame_field = mc.intField(minValue=0)mc.text("Rotation Order")self._rotation_order = mc.optionMenu()mc.menuItem(label='XYZ')mc.menuItem(label='YZX')mc.menuItem(label='ZXY')mc.menuItem(label='XZY')mc.menuItem(label='YXZ')mc.menuItem(label='ZYX')mc.setParent("..")mc.separator()# Targeting UImc.text("Skeleton Targeting")mc.text("(Select the hips)")mc.separator()mc.rowColumnLayout(numberOfColumns=2,columnWidth=[(1, 150), (2, 80)],cs=[(1, 5), (2, 5)],rs=[(1, 5), (2, 5)])self._textfield = mc.textField(editable=False)mc.button("Select/Clear", c=self._on_select_root)mc.setParent("..")mc.separator()mc.button("Import..", c=self._on_select_file)self._reload = mc.button("Reload", enable=False, c=self._read_bvh)# Footermc.text("by Jeroen Hoolmans")mc.window(win, e=True, rtf=True, sizeable=False)mc.showWindow(win)def _on_select_file(self, e):"""Callback for the import button."""file_filter = "All Files (*.*);;Motion Capture (*.bvh)"result = mc.fileDialog2(fileFilter=file_filter, dialogStyle=1, fm=1)if result is None or not len(result):returnself._filename = result[0]mc.button(self._reload, e=True, enable=True)# Action!self._read_bvh()def load_bvh(self, filename):self._filename = filenameself._read_bvh()def _read_bvh(self, *_args):# Safe close is needed for End Site part to keep from setting new# parent.safe_close = False# Once motion is active, animate.motion = False# Clear channels before appendingself._channels = []# Scale the entire rig and animationrig_scale = mc.floatField(self._scale_field, q=True, value=True)frame = mc.intField(self._frame_field, q=True, value=True)rot_order = mc.optionMenu(self._rotation_order, q=True, select=True) - 1with open(self._filename) as f:# Check to see if the file is valid (sort of)if not f.readline().startswith("HIERARCHY"):mc.error("No valid .bvh file selected.")return Falseif self._root_node is None:# Create a group for the rig, easier to scale.# (Freeze transform when ungrouping please..)mocap_name = os.path.basename(self._filename)grp = mc.group(em=True, name="_mocap_%s_grp" % mocap_name)mc.setAttr("%s.scale" % grp, rig_scale, rig_scale, rig_scale)# The group is now the 'root'my_parent = TinyDAG(grp, None)else:my_parent = TinyDAG(self._root_node, None)self._clear_animation()for line in f:line = line.replace(" ", " ") # force spacesif not motion:# root jointif line.startswith("ROOT"):# Set the Hip joint as rootif self._root_node:my_parent = TinyDAG(str(self._root_node), None)else:my_parent = TinyDAG(line[5:].rstrip(), my_parent)# Update root node in case we want to reload.self._root_node = my_parentmc.textField(self._textfield,e=True,text=my_parent.full_path())if "JOINT" in line:jnt = space_re.split(line.strip())# Create the jointmy_parent = TinyDAG(jnt[1], my_parent)if "End Site" in line:# Finish up a hierarchy and ignore a closing bracketsafe_close = Trueif "}" in line:# Ignore when safeClose is onif safe_close:safe_close = Falsecontinue# Go up one levelif my_parent is not None:my_parent = my_parent.parentif my_parent is not None:mc.select(my_parent.full_path())if "CHANNELS" in line:chan = line.strip()chan = space_re.split(chan)# Append the channels that are animatedfor i in range(int(chan[1])):self._channels.append("%s.%s" % (my_parent.full_path(),translationDict[chan[2 + i]]))if "OFFSET" in line:offset = line.strip()offset = space_re.split(offset)jnt_name = str(my_parent)# When End Site is reached, name it "_tip"if safe_close:jnt_name += "_tip"# skip if existsif mc.objExists(my_parent.full_path()):jnt = my_parent.full_path()else:# Build a new jointjnt = mc.joint(name=jnt_name, p=(0, 0, 0))mc.setAttr(jnt + ".rotateOrder", rot_order)mc.setAttr(jnt + ".translate",float(offset[1]),float(offset[2]),float(offset[3]))if "MOTION" in line:# Animate!motion = Trueelse:# We don't really need to use Frame count and time# (since Python handles file reads nicely)if "Frame" not in line:data = space_re.split(line.strip())# Set the values to channelsfor index, value in enumerate(data):mc.setKeyframe(self._channels[index],time=frame,value=float(value))frame = frame + 1def _clear_animation(self):if self._root_node is None:mc.error("Could not find root node to clear animation.")return# Select hierarchymc.select(str(self._root_node), hi=True)nodes = mc.ls(sl=True)trans_attrs = ["translateX", "translateY", "translateZ"]rot_attrs = ["rotateX", "rotateY", "rotateZ"]for node in nodes:for attr in trans_attrs + rot_attrs:# Delete input connectionsconnections = mc.listConnections("%s.%s" % (node, attr),s=True,d=False)if connections is not None:mc.delete(connections)for attr in rot_attrs:# Reset rotationmc.setAttr("%s.%s" % (node, attr), 0)def _on_select_root(self, *_args):# When targeting, set the root joint (Hips)selection = mc.ls(sl=True, type="joint", l=True)if len(selection) == 0:self._root_node = Nonemc.textField(self._textfield, e=True, text="")else:self._root_node = selection[0]mc.textField(self._textfield, e=True, text=self._root_node)if __name__ == "__main__":dialog = BVHImporterDialog()maya导出bvh脚本
https://github.com/zhaozigu/maya-export-bvh/blob/main/export_bvh.py
import os
import mathimport maya.cmds as cmds
import maya.api.OpenMaya as omdef get_bone_rotation(bone):cur_mat = om.MMatrix(cmds.xform(bone, q=True, ws=True, m=True))parent = cmds.listRelatives(bone, p=True)[0]parent_mat = om.MMatrix(cmds.xform(parent, q=True, ws=True, m=True))local_mat = cur_mat * parent_mat.inverse()cur_xfo_mat = om.MTransformationMatrix(local_mat)rotation = [math.degrees(x) for x in cur_xfo_mat.rotation().asVector()]return rotationdef export_motion(joints, start_frame, end_frame, rot_order: tuple):motion_str = ""root_joint = joints[0]for frame in range(start_frame, end_frame + 1):cmds.currentTime(frame)for joint in joints:joint_name = cmds.ls(joint, long=True)[0]rot = get_bone_rotation(joint_name)if joint == root_joint:loc = cmds.xform(joint_name, q=True, translation=True)motion_str += "%.6f %.6f %.6f " % (loc[0], loc[1], loc[2])motion_str += "%.6f %.6f %.6f " % (rot[rot_order[0]], rot[rot_order[1]], rot[rot_order[2]])motion_str += "\n"return motion_strdef export_hierarchy(joints, rot_order: str):hierarchy_str = "HIERARCHY\n"def _process_joint(joint, indent):nonlocal hierarchy_strjoint_name_raw = cmds.ls(joint, long=True)[0]joint_name = joint_name_raw.split("|")[-1].split(":")[-1]if indent == 0:hierarchy_str += "{}ROOT {}\n".format('\t' * indent, joint_name)else:hierarchy_str += "{}JOINT {}\n".format('\t' * indent, joint_name)loc = cmds.xform(joint_name_raw, q=True, translation=True)hierarchy_str += "{}{{\n".format('\t' * indent)hierarchy_str += "{}OFFSET {:.6f} {:.6f} {:.6f}\n".format('\t' * (indent + 1), loc[0], loc[1], loc[2])if indent == 0:hierarchy_str += "{}CHANNELS 6 Xposition Yposition Zposition {}rotation {}rotation {}rotation\n".format('\t' * (indent + 1), rot_order[0], rot_order[1], rot_order[2])else:hierarchy_str += "{}CHANNELS 3 {}rotation {}rotation {}rotation\n".format('\t' * (indent + 1), rot_order[0], rot_order[1], rot_order[2])children = cmds.listRelatives(joint, children=True, type="joint")if children:for child in children:_process_joint(child, indent + 1)else:hierarchy_str += "{}End Site\n".format('\t' * (indent + 1))hierarchy_str += "{}{{\n".format('\t' * (indent + 1))hierarchy_str += "{}OFFSET 0.0 0.0 0.0\n".format('\t' * (indent + 2))hierarchy_str += "{}}}\n".format('\t' * (indent + 1))hierarchy_str += "{}}}\n".format('\t' * indent)root_joint = joints[0]_process_joint(root_joint, 0)return hierarchy_strdef export_bvh(joints, output_file_path, start_frame, end_frame, rot_order="ZXY"):_order = {"XYZ": (0, 1, 2),"XZY": (0, 2, 1),"YXZ": (1, 0, 2),"YZX": (1, 2, 0),"ZXY": (2, 0, 1),"ZYX": (2, 1, 0),}assert rot_order in _order, "The parameters of the rotation order are incorrect"hierarchy = export_hierarchy(joints, rot_order)motion = export_motion(joints, start_frame, end_frame, _order[rot_order])num_frames = end_frame - start_frame + 1frame_rate = cmds.playbackOptions(query=True, framesPerSecond=True)if frame_rate == 0:frame_rate = 24.0frame_time = 1.0 / frame_ratewith open(output_file_path, "w") as output_file:output_file.write(hierarchy)output_file.write(f"MOTION\nFrames: {num_frames}\nFrame Time: {frame_time:.6f}\n")output_file.write(motion)def get_ordered_joints(joint):ordered_joints = [joint]children = cmds.listRelatives(joint, children=True, type="joint")if children:for child in children:ordered_joints.extend(get_ordered_joints(child))return ordered_jointsif __name__ == "__main__":root_joint_name = "root"root_joint = Nonechildren = cmds.listRelatives(root_joint_name, children=True, type="joint")if children:root_joint = children[0]else:raise ValueError(f"No joint found under {root_joint_name}")joints = get_ordered_joints(root_joint)print(joints)start_frame = int(cmds.playbackOptions(query=True, minTime=True))end_frame = int(cmds.playbackOptions(query=True, maxTime=True))# Set the output file pathoutput_file_path = os.path.join(os.path.expanduser("~"), "maya_body_test.bvh")export_bvh(joints, output_file_path, start_frame, end_frame, "ZYX")相关文章:
maya打开bvh脚本
目录 maya打开脚本编辑器 运行打开bvh脚本 maya导出bvh脚本 maya打开脚本编辑器 打开Maya软件,点击右下角 “脚本编辑器” 运行打开bvh脚本 https://github.com/jhoolmans/mayaImporterBVH/blob/master/bvh_importer.py import os import re from typing impo…...
【JavaSE】数据类型和运算符
前言 从这一篇我们开始Java的学习~ 欢迎关注个人主页:逸狼 创造不易,可以点点赞吗~ 如有错误,欢迎指出~ 目录 前言 Java第一个程序 字面常量 字面常量的分类 结合代码理解 类型转换 类型提升 byte与byte的运算 正确写法 字符串类型St…...

Docker 哲学 - ip 的组成规则 与 网关介绍
在 IP 地址中,我们通常将 IP 地址分为两部分:网络部分和主机部分。网络部分用于标识网络,主机部分用于标识该网络中的特定主机。 IP 地址的每个部分(也被称为一个八位组或一个字节)可以是从0到255的任何值。 一个 IPv4…...
数学建模竞赛真的是模型解题一般,但是论文出彩而获奖的吗?
最近,数乐君发现有同学会有这样的问题:在数学建模国赛中,会因为参赛团队的模型解题一般,但论文写得非常精彩而获奖吗? 是的,确实会存在这样的情况。 我们都知道数学建模竞赛最终都是以提交成品论文的形式…...

深度学习常见的三种模型
深度学习模型实际上是一个包含多个隐藏层的神经网络,目前主要有卷积神经网络(CNN)、深度置信网络(DBN)、循环神经网络(RNN)。 1) 卷积神经网络 在机器学习领域,卷积神经网络属于前…...

接口自动化测试分层设计与实践总结
🍅 视频学习:文末有免费的配套视频可观看 🍅 关注公众号:互联网杂货铺,回复1 ,免费获取软件测试全套资料,资料在手,涨薪更快 接口测试三要素: 参数构造 发起请求&#x…...
集合(下)Map集合的使用
文章目录 前言一、Map接口二、Map接口的实现类 1.HashMap类2.TreeMap类总结 前言 Map集合没有继承Collection接口,不能像List集合和Set集合那样直接使用Collection接口的方法。Map集合其自身通过以key到value的映射关系实现的集合,也有相应的许多方法。类…...

AAPT: error: resource android:attr/dialogCornerRadius not found.
ERROR:D:\android.gradle\caches\transforms-3\b3b98118f65da38d0ad9da84cfc70a72\transformed\appcompat-1.0.0\res\values-v28\values-v28.xml:5:5-8:13: AAPT: error: resource android:attr/dialogCornerRadius not found. 请帮我看看这个错误是什么意思。我改如何做。 这个…...
数字功放VS模拟功放,选择适合你的音频解决方案
数字功放和模拟功放是音频系统中常用的两种功放技术,适用于不同的音频应用,都具有各自的优势和特点。本文将为您详细介绍数字功放和模拟功放的差异,并帮助您找到适合自己的音频解决方案。 1、数字功放是一种利用数字信号处理技术的功放。它将…...

5.88 BCC工具之tcpsynbl.py解读
一,工具简介 tcpsynbl工具以直方图的形式显示SYN到达时的TCP SYN积压大小。这可以让我们了解应用程序距离达到积压限制并丢弃SYN(导致SYN重传产生性能问题)还有多远。 TCP SYN 数据包则通常用于启动 TCP 三次握手过程的第一次握手。 二,代码示例 #!/usr/bin/env python…...
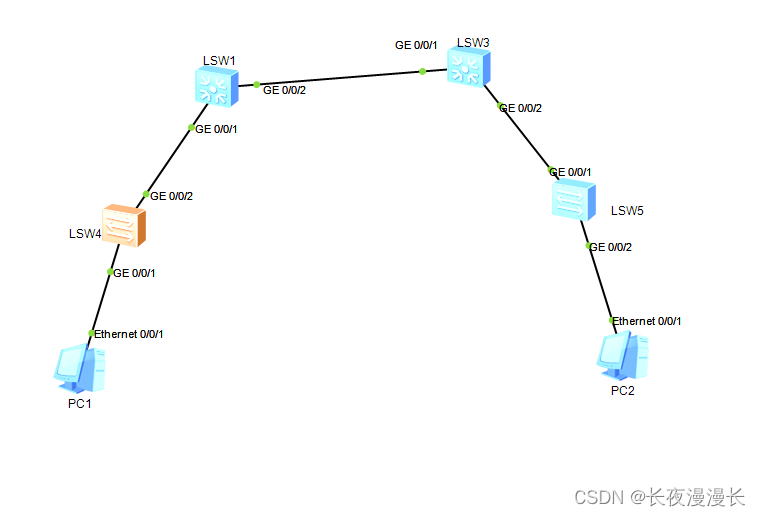
GVRP实现vlan的自动创建和注册
拓扑图 资源已上传 流程 第一、每台交换机的全局及端口下使能GVRP功能 第二、配置交换机的二层连通性,交换机某些端口配置Trunk端口,并允许相应的vlan通过 第三、在交换机4和5配置静态vlan100,然后查看1和3交换机是否有vlan100的定义&…...
Oracle VM VirtualBox修改磁盘大小
一、 修改虚拟机磁盘大小 先把虚拟机停掉。再增加磁盘大小。 路径中有空格的用""包起来。 D:\Program Files\Oracle\VirtualBox>VBoxManage.exe modifyhd "D:\Program Files\VirtualBox VMs\mycentos\mycentos.vdi" --resize 30000 0%...10%...20%...3…...
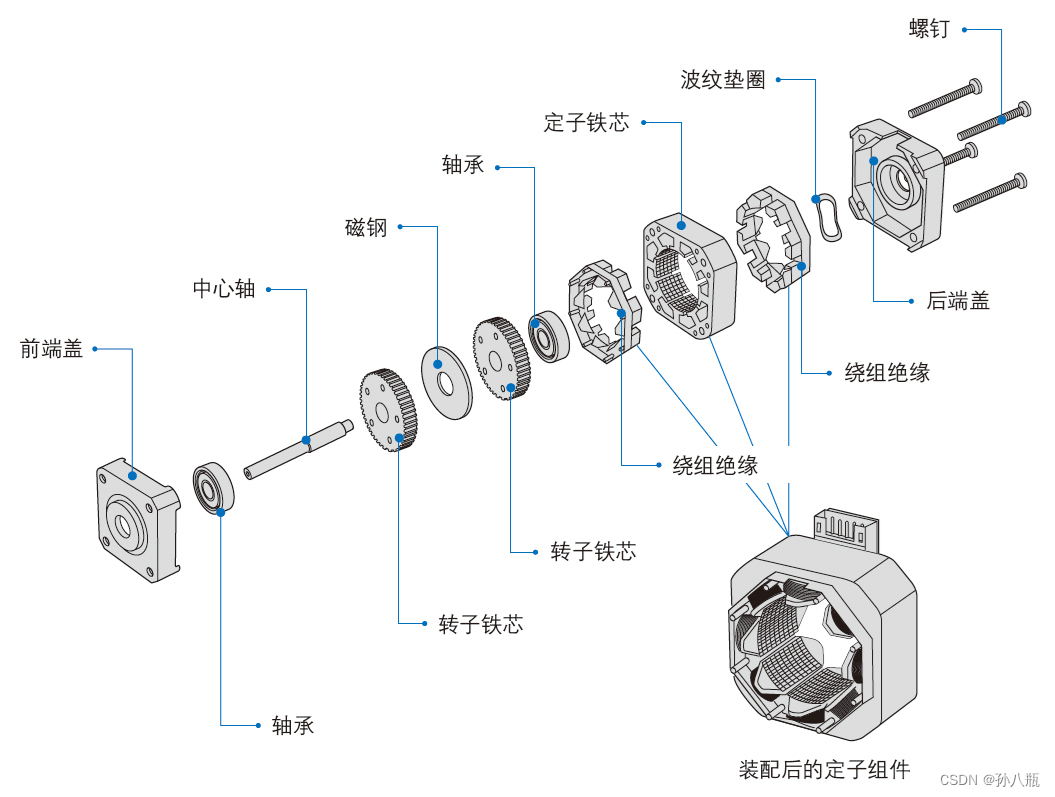
【嵌入式硬件】步进电机
1.步进电机简介 1.1步进电机基本原理 步进电机的英文是stepping motor。step的中文意思是行走、迈步。所以仅从字面上我们就可以得知,步进电机就是一步一步移动的电动机。说的官方一点儿,步进电机是一种将电脉冲信号转换成相应角位移或者线位移的电动机(直线电机)。下图为…...

FlyControls 是 THREE.js 中用于实现飞行控制的类,它用于控制摄像机在三维空间中的飞行。
demo演示地址 FlyControls 是 THREE.js 中用于实现飞行控制的类,它用于控制摄像机在三维空间中的飞行。 入参: object:摄像机对象,即要控制的摄像机。domElement:用于接收用户输入事件的 HTML 元素,通常…...

【Java程序设计】【C00366】基于(JavaWeb)Springboot的纹理生产图片系统(有论文)
TOC 博主介绍:java高级开发,从事互联网行业六年,已经做了六年的毕业设计程序开发,开发过上千套毕业设计程序,博客中有上百套程序可供参考,欢迎共同交流学习。 项目简介 项目获取 🍅文末点击卡片…...

编译原理Lab. 1 初代编译器实验说明和要求
目录 Lab. 1 初代编译器实验说明和要求一、初代编译器功能描述二、初代编译器文法要求三、初代编译器测试样例四、初代编译器提交要求五、初代编译器实验测试框架说明 代码与思路 Lab. 1 初代编译器实验说明和要求 一、初代编译器功能描述 初代编译器将 C 语言顺序语句序列翻…...

python判断工作日,节假日
一、概述 需要判断一个日期是否为工作日,节假日。 找到一个现成的插件,蛮好用的。 插件介绍 https://pypi.org/project/chinesecalendar/ 判断某年某月某一天是不是工作日/节假日。 支持 2004年 至 2020年,包括 2020年 的春节延长。 兼容…...
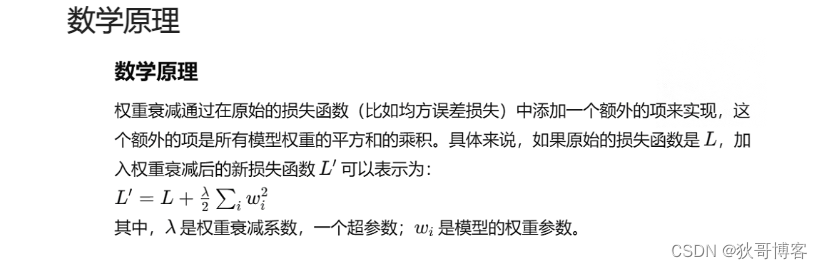
练习4-权重衰减(李沐函数简要解析)
环境:练习1的环境 代码详解 0.导入库 import torch from torch import nn from d2l import torch as d2l1.初始化数据 这里初始化出train_iter test_iter 可以查一下之前的获取Fashion数据集后的数据格式与此对应 n_train, n_test, num_inputs, batch_size 20, 100, 200, …...

websocket 中 request-line 中的URI编码问题
首先,request-line组成如下: Request-Line Method SP Request-URI SP HTTP-Version CRLF 在 rfc6455 规范的 5.1.2 Request-URI 中,有这样的描述: The Request-URI is transmitted in the format specified in section 3.2.1. …...

为何ChatGPT日耗电超50万度?
看新闻说,ChatGPT每天的耗电量是50万度,国内每个家庭日均的耗电量不到10度,ChatGPT耗电相当于国内5万个家庭用量。 网上流传,英伟达创始人黄仁勋说:“AI的尽头是光伏和储能”,大佬的眼光就是毒辣ÿ…...

智慧医院边缘计算架构:QoS驱动的低延迟医疗物联网实践
1. 项目概述:当智慧医院遇上边缘计算在智慧医院的日常运营中,我们正面临一个日益尖锐的矛盾:一边是海量医疗物联网设备产生的实时数据洪流,另一边是云端数据中心在处理这些数据时难以逾越的延迟与带宽瓶颈。想象一下,一…...

逻辑可解释性:用SAT/SMT/MILP求解器为机器学习模型提供可验证的解释
1. 项目概述:当机器学习遇上形式化逻辑在机器学习模型日益渗透到医疗诊断、金融风控、自动驾驶等高风险决策领域的今天,一个核心的信任危机也随之而来:我们如何理解一个“黑箱”模型做出的判断?传统的可解释性方法,如L…...

基于RNN的数字-实体关系抽取:从非结构化文本中提取结构化信息
1. 项目概述与核心价值在信息爆炸的时代,我们每天都会接触到海量的非结构化文本,比如医学文献、金融报告、新闻资讯。这些文本中蕴含着大量有价值的结构化信息,例如“患者平均年龄67.6岁”、“手术成功率为38%”、“公司营收增长15%”。传统上…...

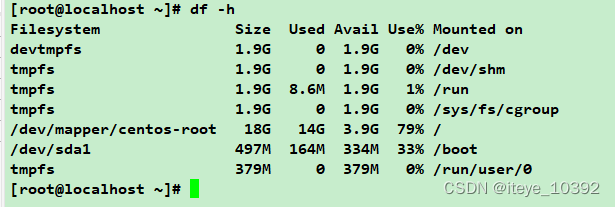
黑群晖硬盘满了别慌!手把手教你用SSH命令行扩容,Linux系统也通用
黑群晖存储扩容实战:SSH命令行全流程指南与Linux通用技巧当你发现黑群晖的存储空间亮起红灯时,那种焦虑感我深有体会。去年我的媒体服务器突然报出"存储空间不足"警告,当时存放的4TB家庭影像资料和重要工作备份几乎占满了整个磁盘。…...

ERR_CONNECTION_REFUSED 根本原因与四步定位法
1. 这个报错不是网络问题,而是本地服务没跑起来的“心跳停止”信号你刚在终端敲下npm run dev,浏览器自动打开http://localhost:3000,页面一片空白,F12 打开 Console,赫然一行红字:Failed to load resource…...
)
Midjourney颗粒度失控急救包:1键降噪工作流(含自研NoiseMap可视化插件+Discord私密调试频道入口)
更多请点击: https://codechina.net 第一章:Midjourney颗粒感失控的本质诊断与认知重构 Midjourney生成图像中异常的颗粒感(graininess),并非单纯由参数噪声或分辨率不足引发,而是模型隐空间解码过程中多层…...

显卡驱动彻底清理解决方案:Display Driver Uninstaller专业使用指南
显卡驱动彻底清理解决方案:Display Driver Uninstaller专业使用指南 【免费下载链接】display-drivers-uninstaller Display Driver Uninstaller (DDU) a driver removal utility / cleaner utility 项目地址: https://gitcode.com/gh_mirrors/di/display-drivers…...

CANN-NPU 显存回收策略:内存碎片整理与显存池化机制实战
一、显存碎片从哪来 1.1 碎片的两种形态 外部碎片——总空闲内存够用,但不连续。比如有 4 块 128MB 空闲,但需要一块 512MB 的连续内存,分配失败。 内部碎片——分配器按固定大小的块分配,实际使用的比分配的小。比如分配 400KB&a…...

SSH安全加固:禁用弱加密算法的实操指南
1. 为什么禁用弱加密算法不是“可选项”,而是SSH上线前的必过门槛我第一次在客户现场接手一台刚部署的CentOS 7跳板机时,安全扫描报告里赫然标红了三条:ssh-rsa签名算法被标记为CRITICAL,diffie-hellman-group1-sha1密钥交换被判定…...

DeepSeek总结的从 DuckDB 迁移到 chDB基准测试
来源: https://github.com/chdb-io/cookbook/tree/main/migration-from-duckdbBENCHMARK.md 迁移基准测试 —— 深度探讨 本文是从 DuckDB 迁移到 chDB指南的配套文档。指南的第 5 节将环境/场景/结果/摘要内联呈现;本文件则包含不适合指南风格流程的部分…...