【计算机图形学】AO-Grasp: Articulated Object Grasp Generation
对AO-Grasp: Articulated Object Grasp Generation的简单理解
文章目录
- 1. 做的事情
- 2. AO-Grasp数据集
- 2.1 抓取参数化和label标准
- 2.2 语义和几何感知的抓取采样
- 3. AO-Grasp抓取预测
- 3.1 预测抓取点
- 3.2 抓取方向预测
- 4. 总结
1. 做的事情
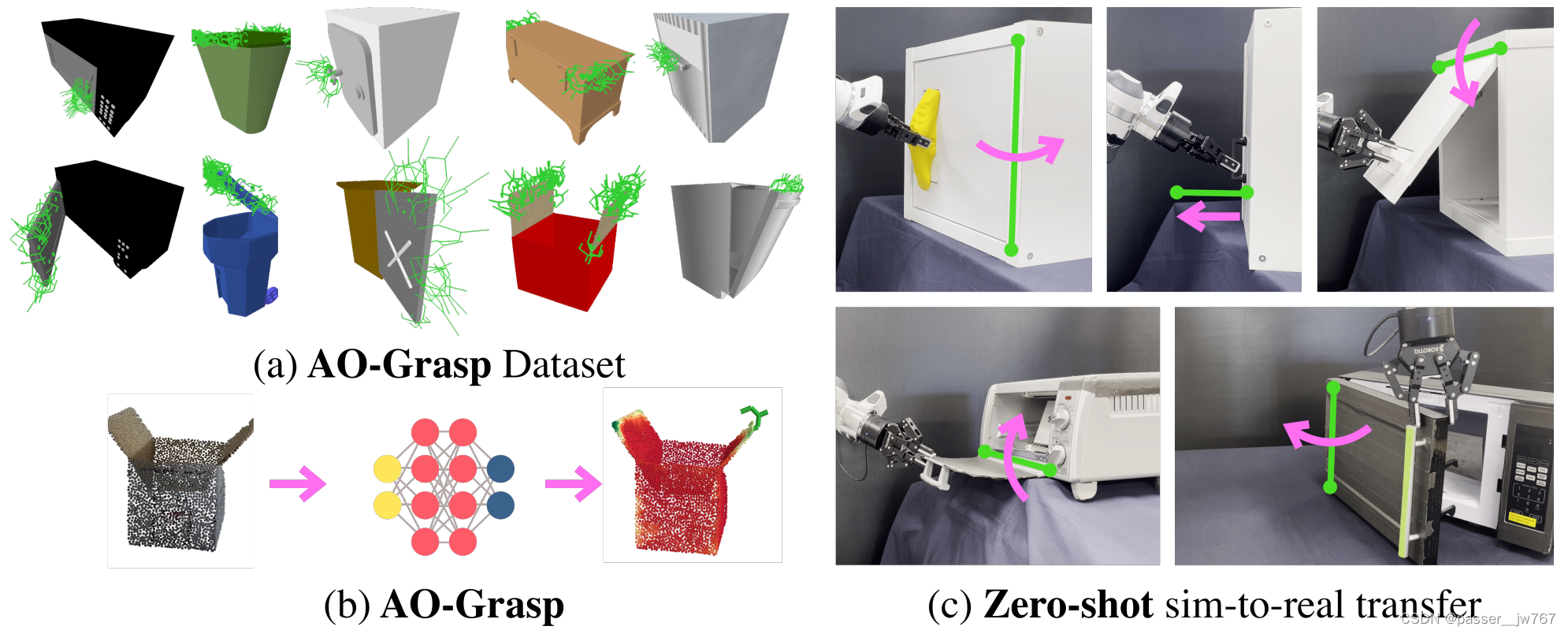
引入AO-Grasp,grasp proposal generation method,生成稳定和可操纵的6DoF铰接物体抓取策略,可以完成打开/关闭橱柜的任务。给定单个铰接物体的部分点云,AO-Grasp使用最新的运动性抓取点预测模型来预测物体上的最佳抓取点,并利用最先进的刚性物体抓取方法来找到对应逐点的抓取方向。
2. AO-Grasp数据集
AO-Grasp数据集是一组模拟数据集,有在铰接物体上的运动抓取。由5个常用家庭家具/应用类别(箱子、洗碗机、烤箱、垃圾桶、保险柜)的61个实例上的48K个6DoF的grasp组成。
对于每个实例,在闭关状态和9个随机采样的打开状态下生成抓取动作,并为每个状态随机蔡阿姨给你20个相机视点。
2.1 抓取参数化和label标准
AO-Grasp数据集使用二指gripper。抓取被表示为 g = ( t , R ) ∈ S E ( 3 ) g=(t,R)∈SE(3) g=(t,R)∈SE(3), t t t是抓取位置, R R R是抓取方向。
与刚性物体抓取相反,抓取的稳定性通常通过摇动物体或施加干扰力验证,我们要求与铰接物体进行语义上有意义的交互,如打开微波炉的门。因此设计了抓取评估过程,不仅衡量抓取稳定性,还衡量可操纵性。
首先在g处生成完全打开的gripper,若没有探测到碰撞,则关闭gripper完成抓取。接着使gripper朝最佳方向运动以驱动物体部件,以执行动作,这个方向是通过物体GT的关节状态和axis获得的。在固定数量的步骤后,终止运动,若满足两个条件则抓取成功:
-
gripper仍然与物体交互,表示grasp是稳定的;
-
被抓取的部件移动了一定的距离,则表示是可运动的。
2.2 语义和几何感知的抓取采样
给定物体实例,目标是采样一组打好标签的抓取。在物体表面均匀采样抓取位置对刚性物体来说是很方便的,但运动性抓取通常集中在很小的范围内(如关闭微波炉的把手),使得均匀采样不够高效。为战胜这个挑战,利用物体语义和几何的先验引导采样。
抓取可运动性与语义强相关。因此,使用部件网格的语义标签来识别可运动比肩,如门,可操纵的零件如旋钮和把手。应用语义感知的采样,更偏向采样可运动部件上的抓取点。
抓取质量同样受物体几何影响。因此偏置采样朝向高曲率变化区域和远离joint axis的点:
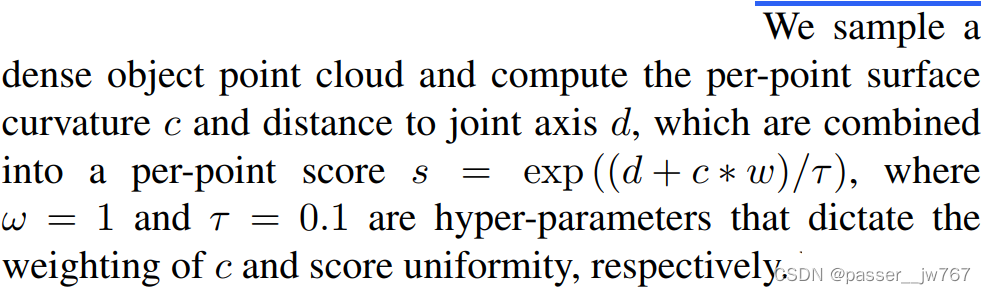
应用几何感知的采样。Following [32], we sample the gripper forward axis within a cone aligned with the surface normal, then uniformly sample the wrist rotation.
3. AO-Grasp抓取预测
输入是铰接物体部分点云,输出是一组6DoF的抓取姿态。
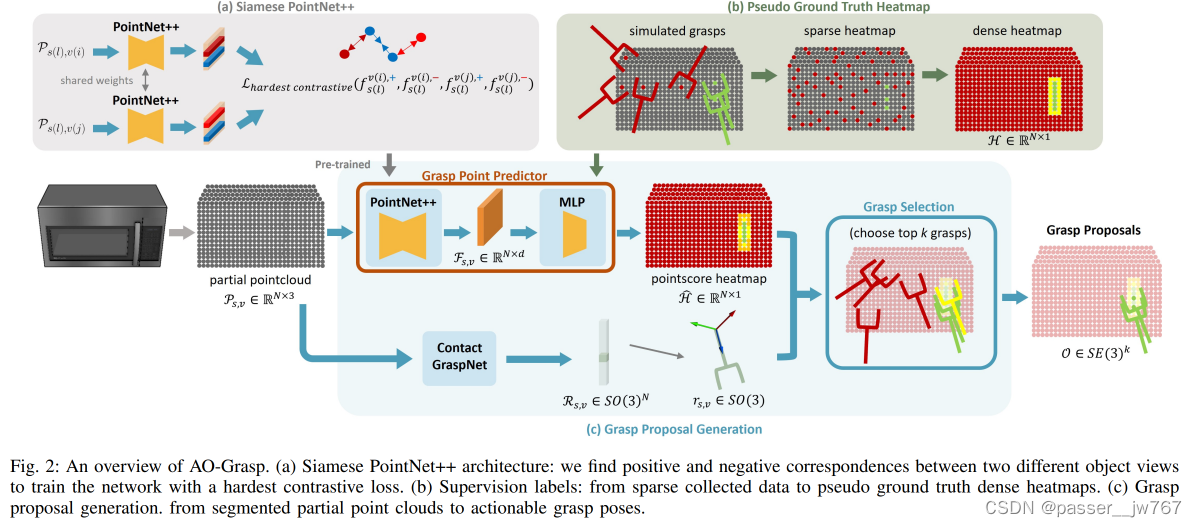
首先,AO-Grasp预测机器人应该抓取物体的哪个位置,这是通过Grasp Point Predictor进行预测的,在AO-Grasp数据集上训练。通过损失设计和训练策略选定来泛化到新的视点和新的物体下。
接着,生成抓取方向,抓取由Grasp Point Predictor预测的抓取点,AO-Grasp由Contact-GraspNet(最先进的刚性物体抓取方法)生成旋转。
最后,从逐点抓取分数和抓取方向,通过选择具有高抓取概率的点来组成抓取建议的最终集合。
3.1 预测抓取点
PointNet++提取特征,MLP预测这个点的抓取概率。使用一下两个策略来获得跨视角、跨物体实例和类别的泛化:
1. 学习视角独立的点对应关系: Actionable Grasp Point Predictor必须理解抓取概率分数是视角独立的,一个好的抓取点在视角改变的情况下应当没有影响。
使用Siamese网络结构来学习视角独立的逐点特征,如图2(a)所示。训练损失为:
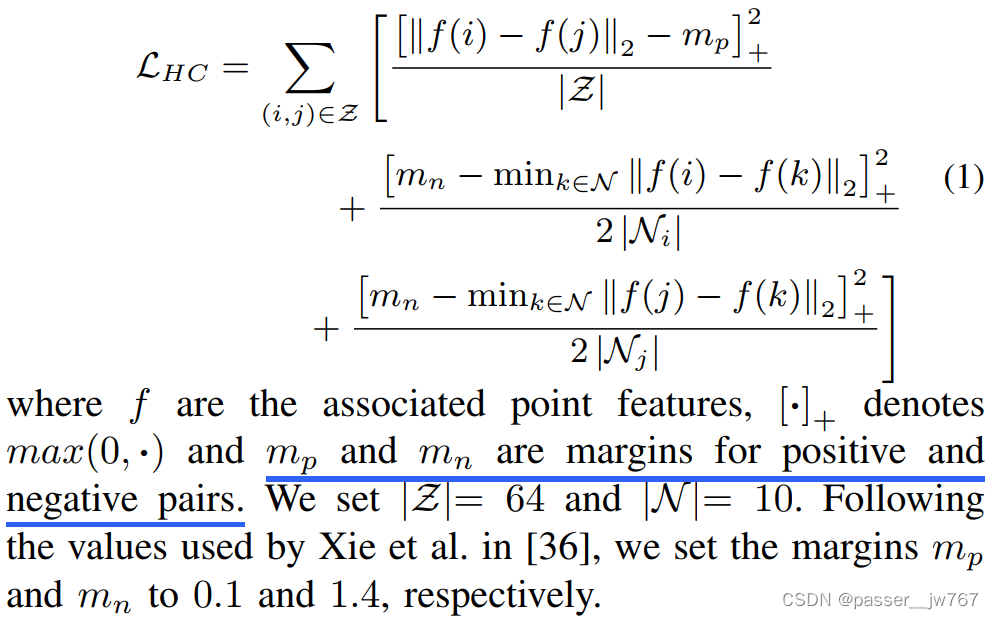
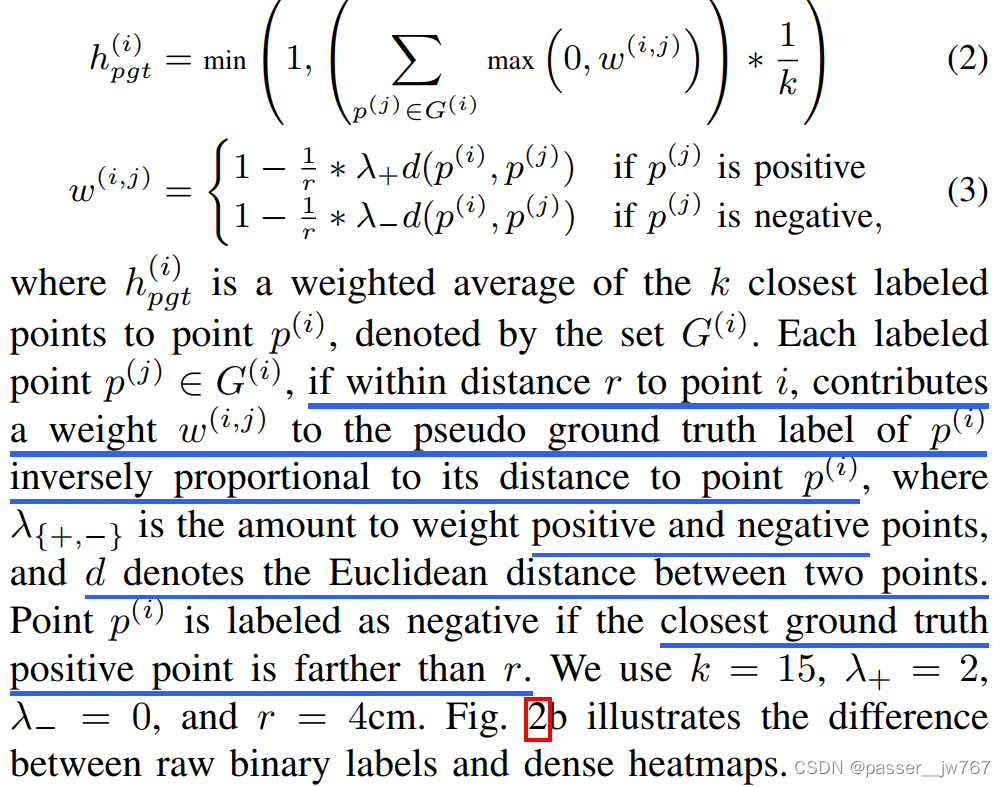
2. 计算密集的“pseudo ground truth”热图: 直接用AO-Grasp数据集中的二进制抓取标签训练会导致在测试类别上较差的泛化性,因为模型会容易过拟合稀疏的数据,为缓和这种过拟合,通过给点云的每个点 p ( i ) p^{(i)} p(i)分配pseudo ground truth标签 h p g t ( i ) h^{(i)}_{pgt} hpgt(i)来增强数据:
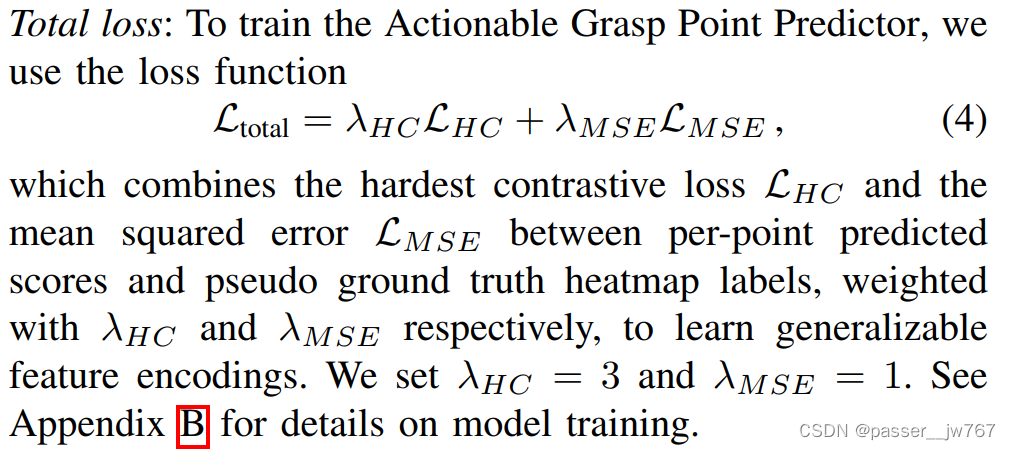
总损失:
3.2 抓取方向预测
用了Contact GraspNet来预测的。没有做创新。
4. 总结
感觉通篇看下来,前面看起来很精彩的样子,但是关于摘取方向的预测好像有点点子烂尾,因为没什么很大的技术创新。。。
相关文章:
【计算机图形学】AO-Grasp: Articulated Object Grasp Generation
对AO-Grasp: Articulated Object Grasp Generation的简单理解 文章目录 1. 做的事情2. AO-Grasp数据集2.1 抓取参数化和label标准2.2 语义和几何感知的抓取采样 3. AO-Grasp抓取预测3.1 预测抓取点3.2 抓取方向预测 4. 总结 1. 做的事情 引入AO-Grasp,grasp propo…...

「媒体宣传」财经类媒体邀约资源有哪些?-51媒体
传媒如春雨,润物细无声,大家好,我是51媒体网胡老师。 财经类媒体邀约资源包括但不限于以下几类: 商业杂志和报纸:可以邀请如《财经》、《新财富》、《经济观察报》等主流商业杂志和报纸。这些媒体通常具有较强的品牌影…...

学习资料记录
http://interview.wzcu.com/Golang/%E4%BB%A3%E7%A0%81%E8%80%83%E9%A2%98.html map底层 https://zhuanlan.zhihu.com/p/616979764 go修养 https://www.yuque.com/aceld/golang/ga6pb1#4b19dba5 https://golang.dbwu.tech/performance/map_pre_alloc/ https://juejin.cn/pos…...

数据结构进阶篇 之 【二叉树】详细概念讲解(带你认识何为二叉树及其性质)
有朋自远方来,必先苦其心志,劳其筋骨,饿其体肤,空乏其身,鞭数十,驱之别院 一、二叉树 1、二叉树的概念 1.1 二叉树中组分构成名词概念 1.2 二叉树的结构概念 1.3 特殊的二叉树 2、二叉树的存储结构 …...

vue.js制作学习计划表案例
通俗易懂,完成“学习计划表”用于对学习计划进行管理,包括对学习计划进行添加、删除、修改等操作。 一. 初始页面效果展示 二.添加学习计划页面效果展示 三.修改学习计划完成状态的页面效果展示 四.删除学习计划 当学习计划处于“已完成”状态时&…...

nginx localtion 匹配规则
1、语法规则 语法规则:location[|~|^~*|^~]/uri/{… } 表示精确匹配,这个优先级也是最高的 ^~ 表示 uri 以某个常规字符串开头,理解为匹配 url 路径即可。 nginx 不对 url 做编码,因此请求为 /image/20%/aa,可以被规则^~ /imag…...

Git:分布式版本控制系统
目录 Git的特点和功能常见的功能和对应的命令 Git的特点和功能 Git是一个分布式版本控制系统,用于跟踪和管理项目的代码变更。它是由Linus Torvalds在2005年创建的,旨在管理Linux内核的开发。Git具有以下特点和功能: 分布式版本控制…...

[STL]priority_queue类及反向迭代器的模拟实现
🪐🪐🪐欢迎来到程序员餐厅💫💫💫 今日主菜: priority_queue类及反向迭代器 主厨:邪王真眼 主厨的主页:Chef‘s blog 所属专栏:c大冒险 向着c&…...

vue2 脚手架
安装 文档:https://cli.vuejs.org/zh/ 第一步:全局安装(仅第一次执行) npm install -g vue/cli 或 yarn global add vue/cli 备注:如果出现下载缓慢:请配置npm 淘宝镜像: npm config set regis…...

【OpenStack】OpenStack实战之开篇
目录 那么,OpenStack是什么?云又是什么?关于容器应用程序OpenStack如何适配其中?如何设置它?如何学会使用它?推荐超级课程: Docker快速入门到精通Kubernetes入门到大师通关课AWS云服务快速入门实战我的整个职业生涯到目前为止一直围绕着为离线或隔离网络设计和开发应用程…...

Python实现WebSocket通信
WebSocket是一种在单个TCP连接上进行全双工通信的协议,位于 OSI 模型的应用层。 与传统的HTTP请求-响应模型不同,WebSocket的最大特点就是,服务器可以主动向客户端推送信息,客户端也可以主动向服务器发送信息,实现实时性和互动性…...
MATLAB 自定义生成直线点云(详细介绍) (47)
MATLAB 自定义生成直线点云 (详细介绍)(47) 一、算法介绍二、具体步骤二、算法实现1.代码2.效果一、算法介绍 通过这里的直线生成方法,可以生成模拟直线的点云数据,并通过调整起点、终点、数量和噪声水平等参数来探索不同类型的直线数据。这种方法可以用于测试、验证和开…...
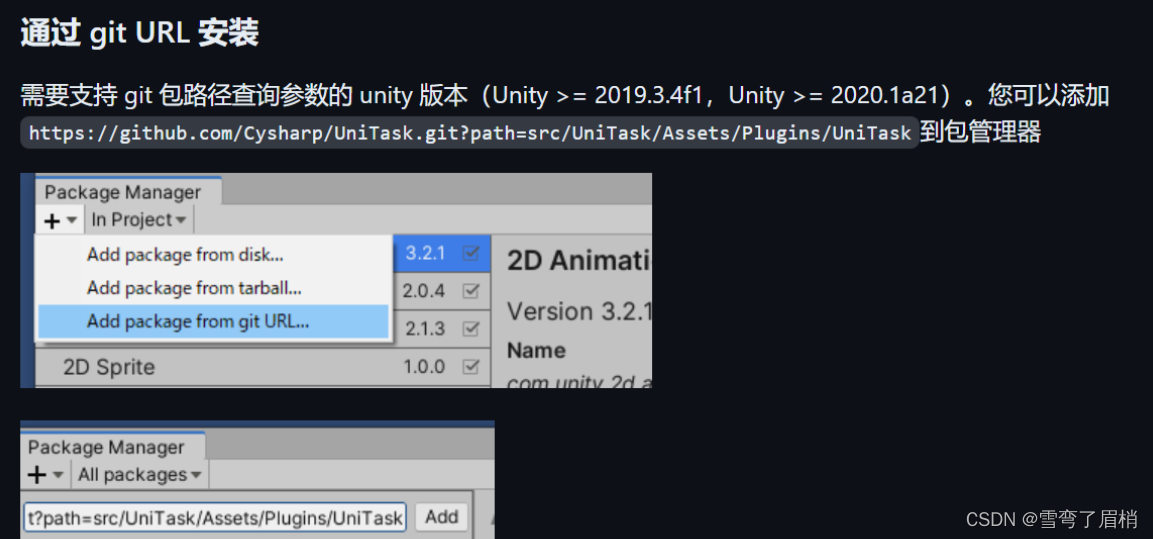
UniTask 异步任务
文章目录 前言一、UniTask是什么?二、使用步骤三、常用的UniTask API和示例1.编写异步方法2.处理异常3.延迟执行4.等待多个UniTask或者一个UniTas完成5.异步加载资源示例6.手动控制UniTask的完成状态7.UniTask.Lazy延迟任务的创建8.后台线程切换Unity主线程9.不要返…...
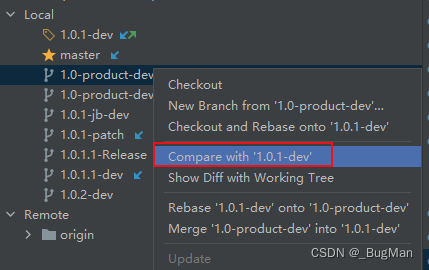
【git分支管理策略】如何高效的管理好代码版本
目录 1.分支管理策略 2.我用的分支管理策略 3.一些常见问题 1.分支管理策略 分支管理策略就是一些经过实践后总结出来的可靠的分支管理的办法,让分支之间能科学合理、高效的进行协作,帮助我们在整个开发流程中合理的管理好代码版本。 目前有两套Git…...
css的transition详解
CSS的transition属性是一个简写属性,用于设置四个过渡效果属性,以在元素的状态改变时创建平滑的动画效果。这四个属性分别是: transition-property: 定义应用过渡效果的CSS属性名称。当指定的CSS属性改变时,过渡效果将…...

agent利用知识来做规划:《KnowAgent: Knowledge-Augmented Planning for LLM-Based Agents》笔记
文章目录 简介KnowAgent思路准备知识Action Knowledge的定义Planning Path Generation with Action KnowledgePlanning Path Refinement via Knowledgeable Self-LearningKnowAgent的实验结果 总结参考资料 简介 《KnowAgent: Knowledge-Augmented Planning for LLM-Based Age…...

01 React新建开发环境
https://create-react-app.dev/docs/getting-started npx create-react-app my-appJSX使用表达式嵌入 function App() {const count 100;function getSelfName() {return "SelfName"}return (<div>Hello World!<div>{This is Javascript message~!}&l…...
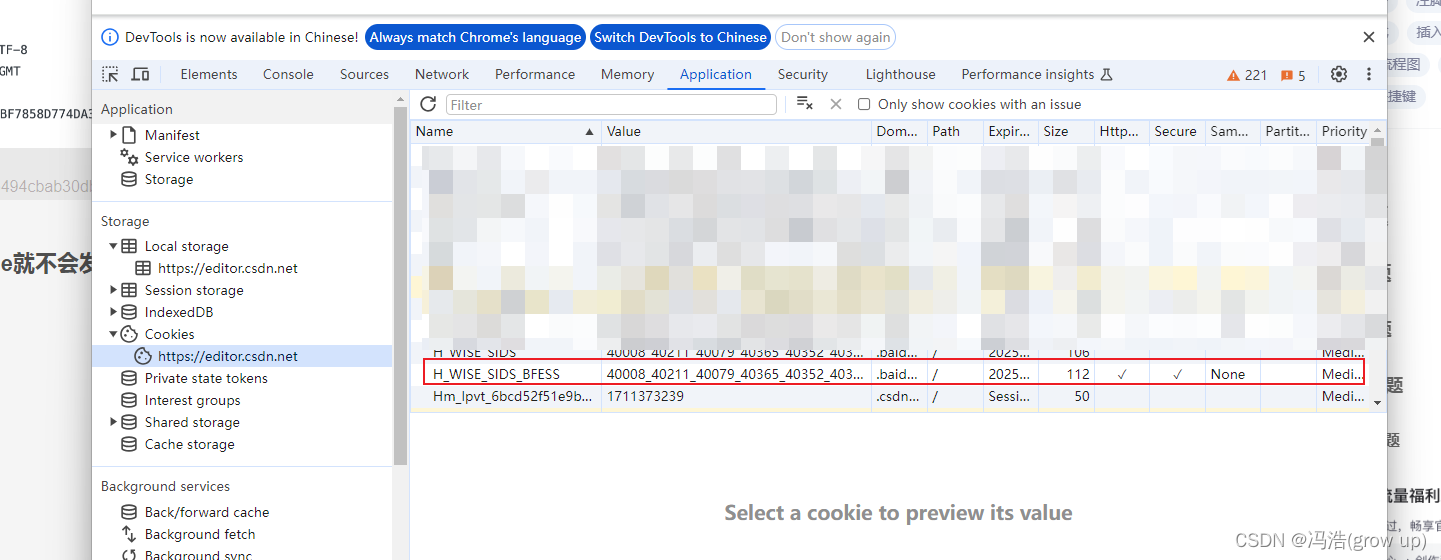
nginx--解决响应头带Set-Cookie导致的验证失败
解决响应头带Set-Cookie导致的验证失败 前言给nginx.conf 设置Secure配置完成后会发现cookie就不会发生变化了 前言 在用nginx做代理的时候,会发现nginx在访问不同ip请求的时候会带setCookie 导致后端就是放开cookie验证,在访问玩这个链接他更新了cooki…...
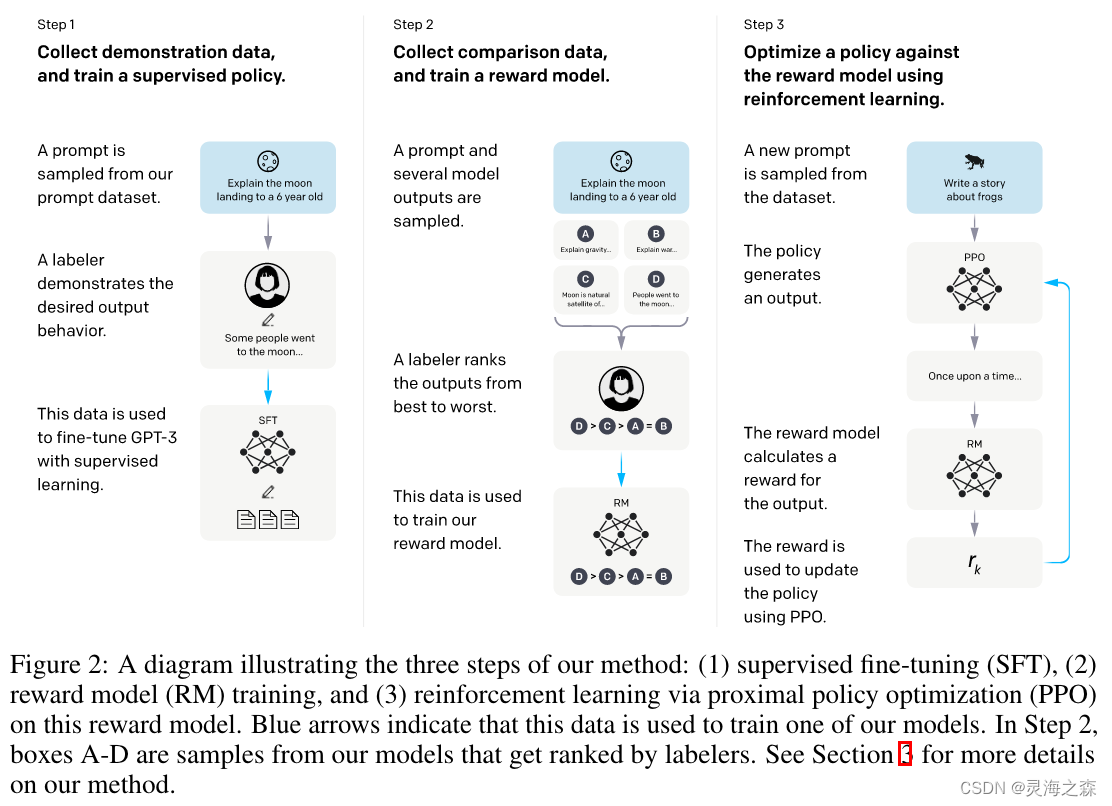
InstructGPT的流程介绍
1. Step1:SFT,Supervised Fine-Tuning,有监督微调。顾名思义,它是在有监督(有标注)数据上微调训练得到的。这里的监督数据其实就是输入Prompt,输出相应的回复,只不过这里的回复是人工…...

docker容器下部署hbase并在springboot中通过jdbc连接
我在windows的docker中部署了一个hbase服务,然后用springboot连接到此服务并访问数据。 详情可参考项目中的README.md。项目中提供了用于构建镜像的dockerfile,以及测试代码。 项目连接: https://gitee.com/forgot940629/hbase_phoenix_sprin…...

3步快速上手SSDD:合成孔径雷达舰船检测终极指南
3步快速上手SSDD:合成孔径雷达舰船检测终极指南 【免费下载链接】Official-SSDD SAR Ship Detection Dataset (SSDD): Official Release and Comprehensive Data Analysis 项目地址: https://gitcode.com/gh_mirrors/of/Official-SSDD SSDD(SAR S…...

回归模型.
...

分布式系统测试:验证分布式系统的正确性和性能
分布式系统测试:验证分布式系统的正确性和性能 一、分布式系统测试概述 1.1 分布式系统测试的定义 分布式系统测试是指对分布式系统进行验证和评估的过程,包括功能测试、性能测试、可靠性测试和安全性测试等方面。它确保分布式系统在各种场景下都能正确、…...

211本科985硕拿下淘天AI二面!全程无代码,这面试题火了!
本文分享了作者在淘天AI应用开发二面中的面试经历,全程不到60分钟,没有手撕代码,也没有问常规Java八股。面试主要围绕自我介绍、AI相关问题、工程与安全问题、项目提问以及反问环节展开。AI相关问题涉及对AI的看法、常用AI工具等;…...

深度学习安全帽佩戴检测系统
1 前言 今天学长向大家介绍一个机器视觉的毕设项目,深度学习安全帽佩戴检测系统 项目运行效果: 毕业设计 深度学习安全帽佩戴检测系统🧿 项目分享:见主页简介 1 课题背景 建筑工人头部伤害是造成建筑伤亡事故的重要原因。佩戴安全帽是防止…...

CVE-2021-4034深度解析:pkexec权限绕过与Linux提权原理
1. 这个漏洞不是“又一个提权”,而是Linux权限模型的照妖镜你可能已经看过几十篇讲CVE-2021-4034的文章,标题都带着“高危”“远程”“一键提权”这类字眼。但实话讲,我第一次在客户环境里复现它时,手是抖的——不是因为怕搞崩系统…...
)
MacBook卡顿想恢复出厂?别急着送修,试试Monterey自带的‘恢复出厂设置’(附机型支持清单)
MacBook系统卡顿自救指南:Monterey恢复出厂设置全解析 当你的MacBook开始出现响应迟缓、软件频繁崩溃或莫名卡顿的情况,很多用户的第一反应是考虑送修或寻找复杂的技术支持。然而,在macOS Monterey及后续版本中,苹果悄然引入了一项…...
bug修改)
找不到测试(No tests were found)bug修改
解决办法 两个地方有时候改一个地方就好了改成在in whole project或者Across module dependencies...

终极游戏库管理器Playnite:一站式管理20+平台游戏的最佳解决方案
终极游戏库管理器Playnite:一站式管理20平台游戏的最佳解决方案 【免费下载链接】Playnite Video game library manager with support for wide range of 3rd party libraries and game emulation support, providing one unified interface for your games. 项目…...

3000+戴森球计划工厂蓝图终极指南:从新手到大师的完全解决方案
3000戴森球计划工厂蓝图终极指南:从新手到大师的完全解决方案 【免费下载链接】FactoryBluePrints 游戏戴森球计划的**工厂**蓝图仓库 项目地址: https://gitcode.com/GitHub_Trending/fa/FactoryBluePrints 还在为戴森球计划中复杂的工厂布局而头疼吗&#…...