借助媛如意让ROS机器人turtlesim画出美丽的曲线-云课版本
首先安装并打开猿如意
其次打开蓝桥云课ROS并加入课程
在猿如意输入问题得到答案
在蓝桥云课ROS验证

如何通过turtlesim入门ROS机器人
您可以通过以下步骤入门ROS机器人:
安装ROS:您需要安装ROS,可以在ROS官网上找到安装指南。
安装turtlesim:turtlesim是ROS中的一个仿真器,可以帮助您学习ROS的基础知识。您可以在终端中输入以下命令安装turtlesim:
sudo apt-get install ros-<distro>-turtlesim
运行turtlesim:在终端中输入以下命令启动turtlesim:
rosrun turtlesim turtlesim_node
控制turtlesim:您可以使用键盘控制turtlesim的移动。在新的终端中输入以下命令:
rosrun turtlesim turtle_teleop_key
现在,您可以使用键盘控制turtlesim的移动了。这是ROS机器人入门的基础知识,您可以通过学习ROS的其他功能来进一步了解ROS机器人。
要让ROS机器人turtlesim画出美丽的曲线,可以使用ChatGPT生成的文本作为输入,然后将其转换为ROS机器人的指令,控制turtlesim移动并绘制出曲线。具体实现方法可以参考ROS官方文档和相关教程。
ROS机器人turtlesim绘制圆形轨迹的Python代码
ROS2机器人turtlesim绘制圆形轨迹的Python代码
代码(CatGPT):
#!/usr/bin/env python
import rospy
from geometry_msgs.msg import Twist
from math import pidef draw_circle():# 初始化ROS节点rospy.init_node('draw_circle', anonymous=True)# 创建一个发布者,发布Twist消息到/cmd_vel话题pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)# 设置循环频率rate = rospy.Rate(10)# 创建Twist消息对象vel = Twist()# 设置线速度vel.linear.x = .5# 设置角速度vel.angular.z = 2*pi/10# 计算绘制圆形轨迹所需的时间t = 2*pi/vel.angular.z# 记录开始时间start_time = rospy.Time.now().to_sec()while not rospy.is_shutdown():# 发布Twist消息pub.publish(vel)# 计算已经绘制的时间elapsed_time = rospy.Time.now().to_sec() - start_time# 如果已经绘制了一个圆,停止运动if elapsed_time > t:break# 按照循环频率休眠rate.sleep()# 停止运动vel.linear.x = vel.angular.z = pub.publish(vel)if __name__ == '__main__':try:draw_circle()except rospy.ROSInterruptException:pass要做修正:
#!/usr/bin/env python
import rospy
from geometry_msgs.msg import Twist
from math import pidef draw_circle():# rospy.init_node('draw_circle', anonymous=True)#pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)#rate = rospy.Rate(10)# vel = Twist()# vel.linear.x = 1.0# vel.angular.z = 2*pi/10# t = 2*pi/vel.angular.z# start_time = rospy.Time.now().to_sec()while not rospy.is_shutdown():# pub.publish(vel)# elapsed_time = rospy.Time.now().to_sec() - start_time# if elapsed_time > t:break# rate.sleep()# vel.linear.x = 0vel.angular.z = 0pub.publish(vel)if __name__ == '__main__':try:draw_circle()except rospy.ROSInterruptException:pass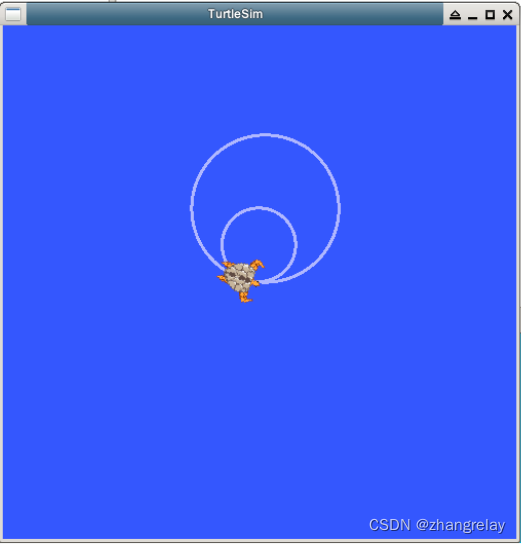
如果需要绘制复杂的曲线可以参考下文:
如何将数学曲线变为机器人轨迹-花式show爱心代码-turtlesim篇

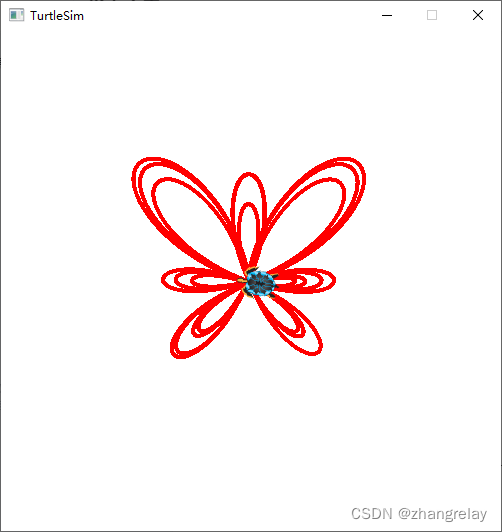
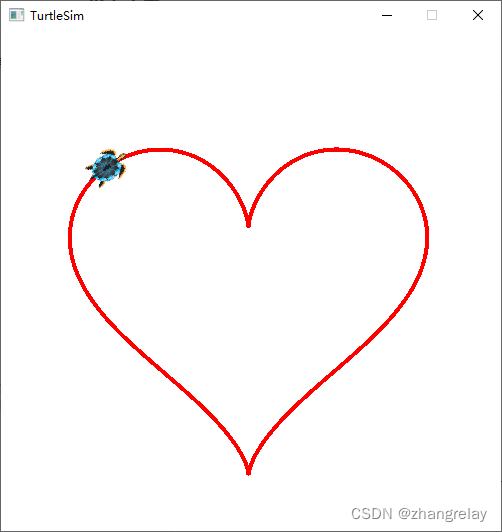
如何让ROS机器人turtlesim绘制出美丽的数学曲线
您可以使用turtlesim中的turtle程序库来控制机器人的移动和绘制曲线。例如,您可以使用turtle程序库中的circle()函数来绘制圆形,使用forward()和right()函数来绘制其他形状。您还可以使用Python中的数学库来计算曲线的坐标。
ROS机器人主题的概念和应用
ROS机器人主题是ROS中的一个核心概念,它是一种消息传递机制,用于实现ROS中不同节点之间的通信。主题可以被看作是一种发布者/订阅者模型,其中发布者将消息发布到主题中,而订阅者则从主题中接收消息。主题的应用非常广泛,可以用于传输各种类型的数据,例如传感器数据、控制指令、图像等。在ROS中,主题是实现分布式机器人控制和协作的重要手段。
相关文章:
借助媛如意让ROS机器人turtlesim画出美丽的曲线-云课版本
首先安装并打开猿如意其次打开蓝桥云课ROS并加入课程在猿如意输入问题得到答案在蓝桥云课ROS验证如何通过turtlesim入门ROS机器人您可以通过以下步骤入门ROS机器人:安装ROS:您需要安装ROS,可以在ROS官网上找到安装指南。安装turtlesim&#x…...

小区业主入户安检小程序开发
小区业主入户安检小程序开发 可针对不同行业自定义安检项目,线下安检,线上留存(安检拍照/录像),提高安检人员安检效率 功能特性,为你介绍小区入户安检系统的功能特性。 小区管理;后台可添加需要安检的小区…...
【C++知识点】异常处理
✍个人博客:https://blog.csdn.net/Newin2020?spm1011.2415.3001.5343 📚专栏地址:C/C知识点 📣专栏定位:整理一下 C 相关的知识点,供大家学习参考~ ❤️如果有收获的话,欢迎点赞👍…...

【FATE联邦学习debug】 No module named ‘federatedml‘
直接pip install federatedml是无法找得到这个库的。 这个的原因是环境变量的事情,因为在部署文档中,本身提示我们要更新一些环境变量,如果不export那些变量,下面的fate_test其实也是无法测试成功的。 打开bin/init_env.sh&#x…...
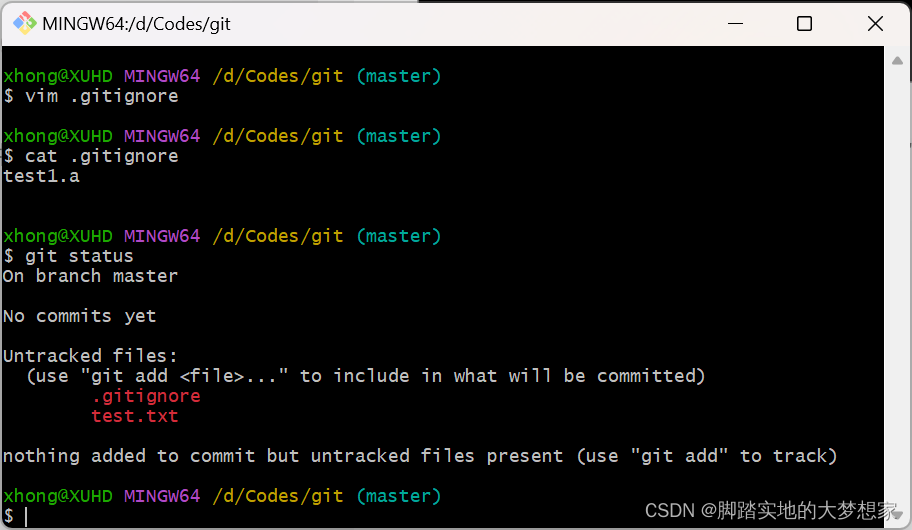
【Git】P1 Git 基础
Git 基础Git 基本概念集中式版本控制工具 与 分布式版本控制工具Git 下载与安装Bash 初始设置创建本地仓库Git 三区概念一个简单的提交流程更改文件后再次提交git 实现版本切换查看提交日志设置 git 快捷键版本切换(一)版本切换(二࿰…...

智能交通数据集Rope3D(仅限科研使用)
Rope3D Dataset 官网:https://thudair.baai.ac.cn/index !!!如想要使用Rope3D数据集进行2D检测,最后有我们处理完的数据集链接。 !!! 介绍: DAIR-V2X数据集是首个用于…...

Java虚拟机JVM-面试题
1、Java 虚拟机是如何捕获异常的? 答: 在编译生成的字节码中,每个方法都附带一个异常表。异常表中的每一个条目代表一个异常处理器,并且由 from 指针、to 指针、target 指针以及所捕获的异常类型构成。这些指针的值是字节码索引…...

详细的说说Redis的数据类型
Redis是一个开源的内存数据库,它可以用作缓存、消息代理、实时数据处理和许多其他用途。Redis是一个key-value存储系统,其中数据存储在内存中,并通过网络进行访问。与传统的关系型数据库不同,Redis支持多种数据结构,包…...

798.差分矩阵
输入一个 n行 m列的整数矩阵,再输入 q个操作,每个操作包含五个整数 x1,y1,x2,y2,c,其中 (x1,y1)和 (x2,y2) 表示一个子矩阵的左上角坐标和右下角坐标。每个操作都要将选中的子矩阵中的每个元素的值加上 c。 请你将进行完所有操作后的矩阵输出…...

InfluxDB 2 介绍与使用 flux查询 数据可视化
一、关键概念 相比V1 移除了database 和 RP,增加了bucket。 V2具有以下几个概念: timestamp、field key、field value、field set、tag key、tag value、tag set、measurement、series、point、bucket、bucket schema、organization 新增的概念&…...
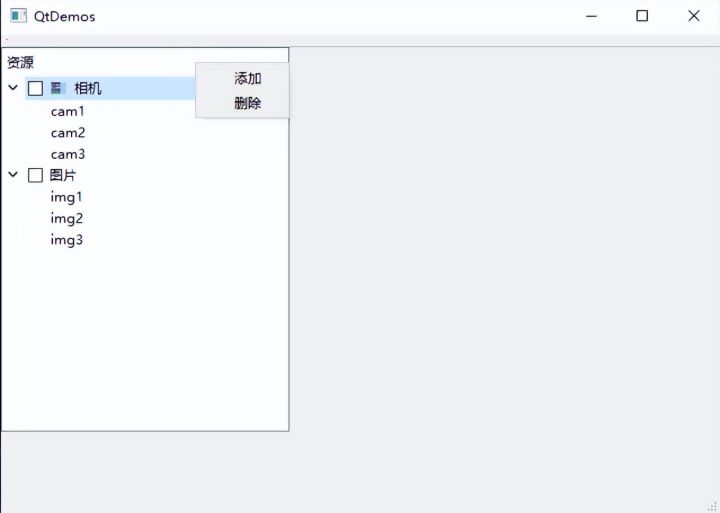
Qt QTreeView简单使用
QT-QTreeView使用方法 QTreeView: 用于显示树状结构数据,适用于树状结构数据的操作。 一、初始化 利用QStandardlternModel来初始化数据,标准的基于项数据的数据模型类, 每个项数据可以是任何数据类型。 // 初始化model QStandardItem…...
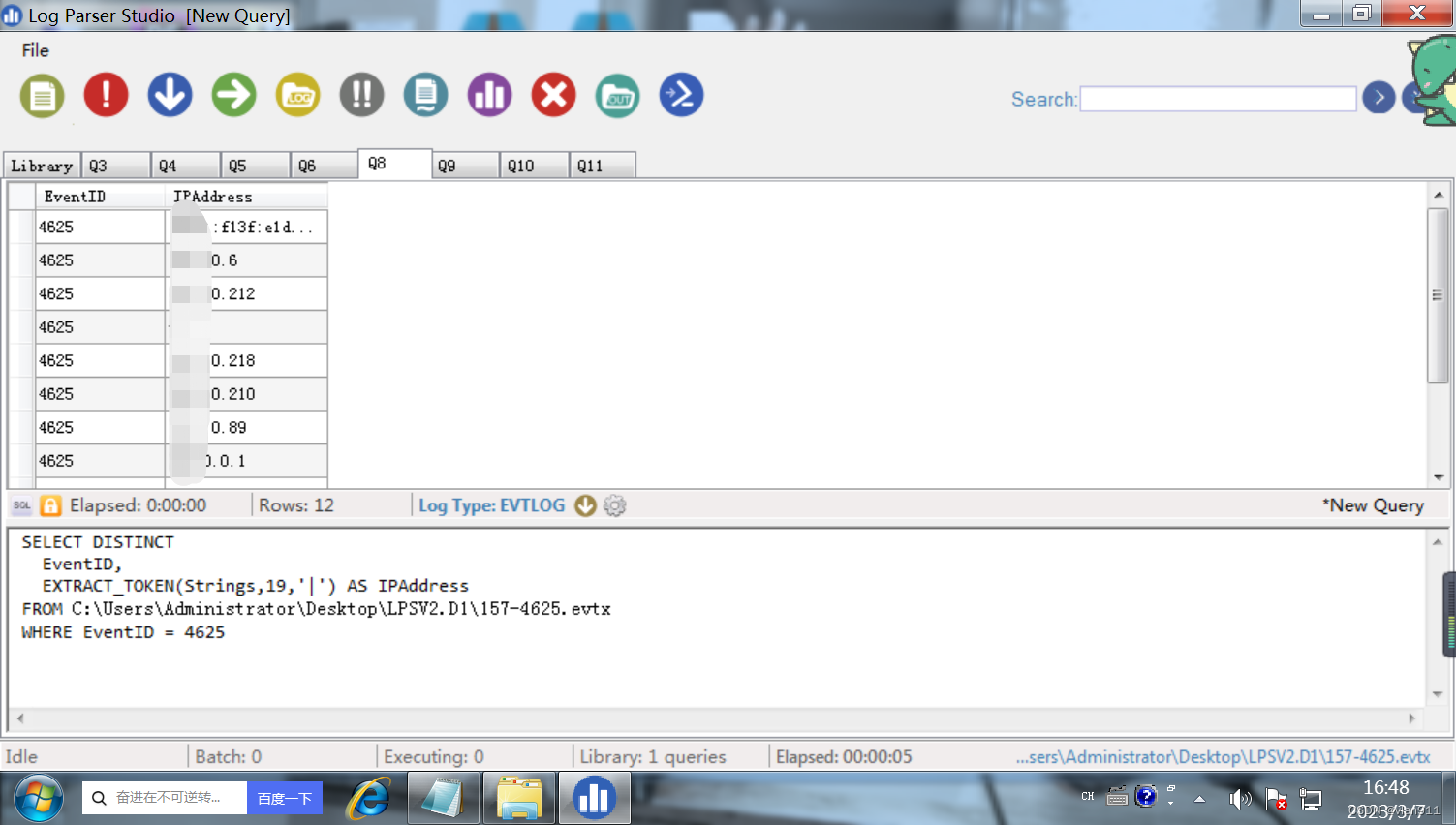
Wannacrypt蠕虫老树开花?又见Wannacrypt
Wannacrypt蠕虫是一个在2017年就出现的远古毒株,其利用永恒之蓝漏洞降维打击用户服务器,而后进行扩散勒索,曾经一度风靡全球,可谓是闻者伤心,听着落泪,因为这玩意解密是不可能 解密的。 而2023年的今天&am…...
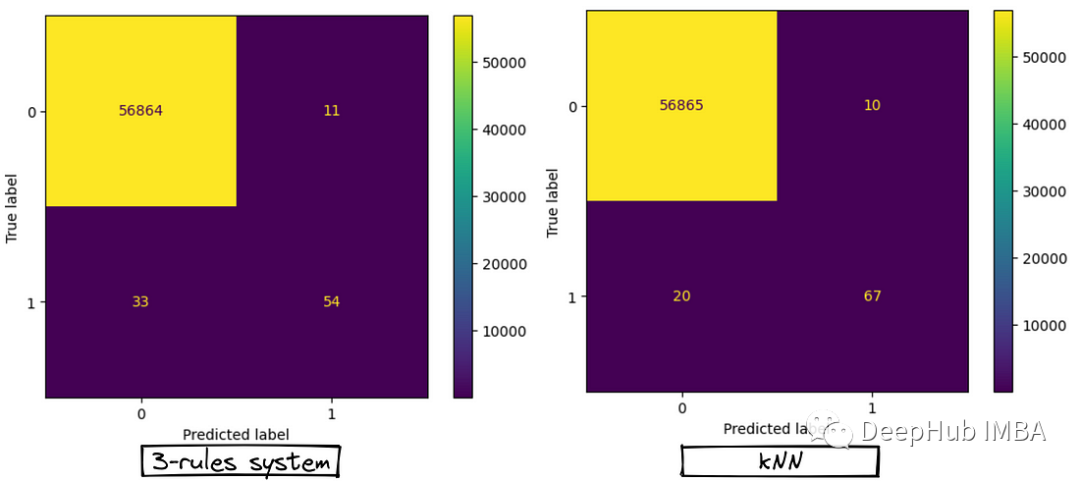
结合基于规则和机器学习的方法构建强大的混合系统
经过这些年的发展,我们都确信ML即使不能表现得更好,至少也可以在几乎所有地方与前ML时代的解决方案相匹配。比如说一些规则约束,我们都会想到能否把它们替换为基于树的ml模型。但是世界并不总是黑白分明的,虽然机器学习在解决问题…...
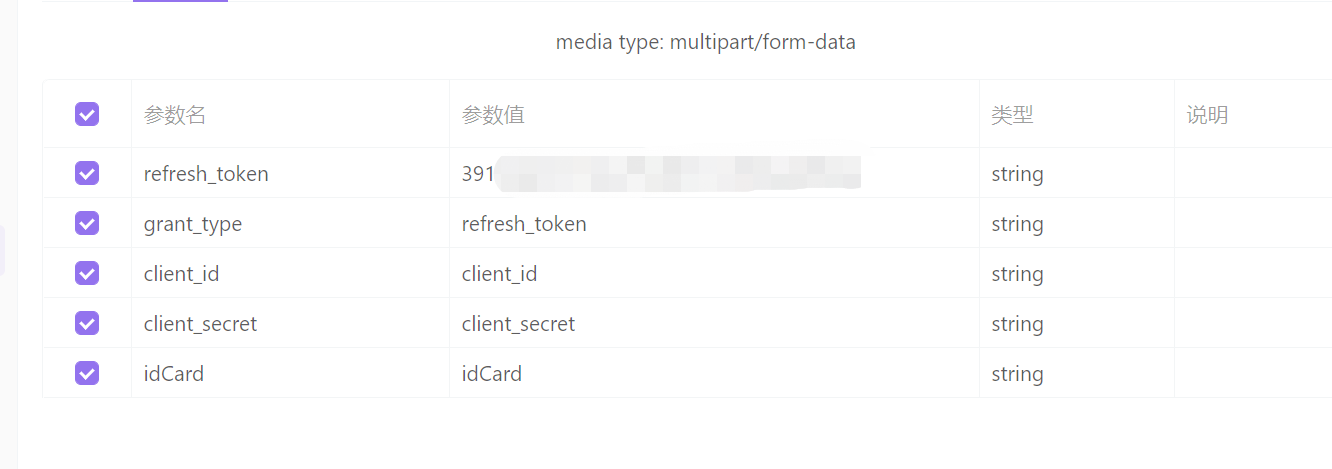
Spring Security OAuth2实现多用户类型认证、刷新Token
原本的OAuth2登录支持用户名密码登录,现在还想支持另外用id号码和密码登录。但是OAuth2默认提供的UserDetailsService只允许传入一个参数:想要实现多种用户登录,是不是可以考虑loadUserByUsername方法携带多个参数呢?接下来记录一…...

云计算介绍,让你更了解云计算
同学们好! 第一次接触IT行业吗?没关系,看完这篇文章肯定会让你不再陌生。给自己几分钟时间,认真看完哦! 1、不知道什么是云计算? 网络计算云计算 官方定义是:通过网络提供可伸缩的分布式计算…...
阿里大佬翻遍全网Java面试文章,总结出这份1658页文档,GitHub收获25K+点赞
就目前大环境来看,跳槽成功的难度比往年高很多。一个明显的感受:今年的面试,无论一面还是二面,都很考验Java程序员的技术功底。这不又到了面试跳槽的黄金段,成功升职加薪,不成功饱受打击。当然也要注意&…...

【JDK1.8 新特性】Lambda表达式
1. 什么是Lambda表达式? Lambda 是一个匿名函数,我们可以把 Lambda 表达式理解为是一段可以传递的代码(将代码像数据一样进行传递)。使用它可以写出更简洁、更灵活的代码。作为一种更紧凑的代码风格,使Java的语言表达…...

【Vue.js】Vuex核心概念
文章目录全局状态管理模式Vuexvuex是什么?什么是“状态管理模式”?vuex的应用场景Vuex安装开始核心概念一、State1、单一状态树2、在 Vue 组件中获得 Vuex 状态3、mapState辅助函数二、Getter三、Mutation1、提交载荷(Payload)2、…...
react router零基础使用教程
安装既然学习 react router 就免不了运行 react安装 reactnpx create-react-app my-appcd my-appnpm start安装 react routernpm install react-router-dom如果一切正常,就让我们打开 index.js 文件。配置路由引入 react-router-dom 的 RouterProviderimport {Route…...

IOC三种依赖注入的方式,以及区别
目录构造方法注入(constructor injection)setter 方法注入(setter injection)接口注入(interface injection)三种方式比较构造方法注入(constructor injection) 构造方法中声明依赖…...

PDF顺手编辑器工具
版式文件编辑器是一款支持PDF和OFD 文件处理工具,可在任何网络下使用。软件完全免费,无广告零弹窗,而且资源占用极小。软件广泛应用在党、政、军及企事业单位中,适合电子公文、证照、票据等领域,应用范围非常广。为啥用…...

CODE-II:百万级心电图AI评估基准与深度学习模型实践
1. 项目概述:当心电图遇上AI,我们如何量化“看懂”的能力?心电图,这个在临床诊断中司空见惯的波形图,背后是心脏每一次搏动的电生理活动记录。医生们通过识别P波、QRS波群、T波的形态、间期和节律,来判断心…...

Podgrab源码架构分析:深入理解Go语言播客管理工具的设计原理
Podgrab源码架构分析:深入理解Go语言播客管理工具的设计原理 【免费下载链接】podgrab A self-hosted podcast manager/downloader/archiver tool to download podcast episodes as soon as they become live with an integrated player. 项目地址: https://gitco…...

GitAhead本地化配置详解:打造最适合你的中文Git环境
GitAhead本地化配置详解:打造最适合你的中文Git环境 【免费下载链接】gitahead Understand your Git history! 项目地址: https://gitcode.com/gh_mirrors/gi/gitahead GitAhead是一款功能强大的Git客户端工具,旨在帮助开发者更直观地理解和管理G…...

SINAMICS V90伺服驱动器故障代码大全
SINAMICS V90伺服驱动器在运行过程中可能出现故障,导致设备停机。用户可通过BOP面板或调试软件查看故障代码,并根据以下信息判断故障原因及处理方法。序号报警号信息故障信息可能原因处理方法1F1000内部软件错误出现了一个内部软件错误。分析故障缓冲器为…...

从“共和国之辉”到AI原生应用:一个关于“哥布林”诞生的技术启示录
从“共和国之辉”到AI原生应用:一个关于“哥布林”诞生的技术启示录 2025年7月,一篇名为《Where the goblins came from》的文章在Hacker News上引发了超过710票的热议。当大多数技术评论者将目光聚焦于AI模型的最新突破时,这篇来自OpenAI的文…...

别再手动调阈值了!OpenCV实战:用Otsu和自适应阈值搞定光照不均的图片分割
智能图像分割实战:Otsu与自适应阈值技术解决光照不均难题 在工业质检、医疗影像分析、自动驾驶等场景中,图像分割的准确性直接影响最终结果。但现实世界的光照条件往往复杂多变——同一张图片可能同时存在过曝和欠曝区域,传统全局阈值方法在…...

如何让经典DirectX游戏在现代Windows上完美运行:DDrawCompat终极兼容解决方案
如何让经典DirectX游戏在现代Windows上完美运行:DDrawCompat终极兼容解决方案 【免费下载链接】DDrawCompat DirectDraw and Direct3D 1-7 compatibility, performance and visual enhancements for Windows Vista, 7, 8, 10 and 11 项目地址: https://gitcode.co…...

NVIDIA aicr:AI容器运行时核心原理与生产部署指南
1. 项目概述:当AI遇见容器运行时如果你在AI开发或者高性能计算领域摸爬滚打过一段时间,大概率会遇到一个让人头疼的问题:如何高效、稳定地管理那些“胃口”巨大、依赖复杂的AI工作负载?从训练一个大型语言模型到运行一个实时的计算…...

Vex:VS Code向量数据库管理扩展,提升AI开发效率
1. 项目概述:Vex,一个为开发者设计的向量数据库管理利器如果你正在用 VS Code 开发 AI 应用,并且和向量数据库(比如 Milvus 或 ChromaDB)打交道,那你大概率经历过这样的场景:为了插入几条测试向…...