math模块篇(七)
文章目录
- math.dist(p, q)
- math.hypot(*coordinates)
- math.sin(x)
- math.tan(x)
- math.degrees(x)
- math.radians(x)
- math.acosh(x)
- math.asinh(x)
- math.atanh(x)
math.dist(p, q)
在Python的math模块中,并没有一个名为math.dist(p, q)的函数。可能你是想要计算两点p和q之间的距离,但这通常不是通过math模块直接完成的。在二维或三维空间中,两点之间的距离可以通过欧几里得距离公式来计算。
对于二维空间中的两点p(x1, y1)和q(x2, y2),它们之间的欧几里得距离d可以通过以下公式计算:
²)
和q(x2, y2, z2),距离d可以通过以下公式计算:
- y1)² + (z2 - z1)²)
,你可以使用math.sqrt和math.pow函数来实现这些计算。下面```是一个计算二维空间中两点距离的示例:
import mathdef calculate_distance(p, q):x1, y1 = px2, y2 = qreturn math.sqrt(math.pow(x2 - x1, 2) + math.pow(y2 - y1, 2))# 示例用法
p = (1, 2)
q = (4, 6)
distance = calculate_distance(p, q)
print(distance) # 输出两点之间的距离
如果你正在处理更高维度的空间或者想要使用更高效的数值计算库,你可能会考虑使用numpy或scipy这样的库,它们提供了更强大的数组操作和数学函数。例如,使用numpy计算二维空间中两点之间的距离可以这样写:
import numpy as npp = np.array([1, 2])
q = np.array([4, 6])
distance = np.linalg.norm(q - p)
print(distance) # 输出两点之间的距离
在这个例子中,np.linalg.norm函数计算了向量q - p的欧几里得范数,也就是两点之间的距离。
math.hypot(*coordinates)
math.hypot(*coordinates) 是 Python 标准库 math 模块中的一个函数,它用于计算给定坐标值的欧几里得范数(Euclidean norm),也就是直角三角形的斜边长度。该函数接受任意数量的参数,每个参数代表一个坐标值,并返回这些坐标值构成的向量的长度。
在数学上,欧几里得范数是通过计算坐标值的平方和然后取平方根来得到的。对于 N 维空间中的点 (x1, x2, …, xN),其欧几里得范数(或长度)定义为:
norm = sqrt(x1^2 + x2^2 + ... + xN^2)
math.hypot 函数就是用来高效计算这个值的。它使用了一种算法,可以避免逐个计算平方和平方根,从而提高了计算效率。
下面是一些使用 math.hypot 的例子:
二维空间中的点
import mathx = 3
y = 4
hypotenuse = math.hypot(x, y)
print(hypotenuse) # 输出 5.0,因为 sqrt(3^2 + 4^2) = sqrt(9 + 16) = sqrt(25) = 5
三维空间中的点
import mathx = 1
y = 2
z = 3
hypotenuse = math.hypot(x, y, z)
print(hypotenuse) # 输出 3.7416573867739413,因为 sqrt(1^2 + 2^2 + 3^2) = sqrt(1 + 4 + 9) = sqrt(14) ≈ 3.7416573867739413
更高维度的空间
你可以传递任意数量的参数给 math.hypot,它都可以计算对应的高维空间中点的欧几里得范数。
import mathx1, x2, x3, x4 = 1, 2, 3, 4
hypotenuse = math.hypot(x1, x2, x3, x4)
print(hypotenuse) # 输出 5.477225575051661,因为 sqrt(1^2 + 2^2 + 3^2 + 4^2) = sqrt(1 + 4 + 9 + 16) = sqrt(30) ≈ 5.477225575051661
总之,math.hypot 函数是一个非常实用的工具,用于计算欧几里得空间中点的向量长度。
math.sin(x)
math.sin(x) 是 Python 中 math 模块的一个函数,用于计算给定角度 x 的正弦值。这里的 x 应该是一个以弧度为单位的角,而不是度。
在 Python 中使用 math.sin(x) 之前,你需要先导入 math 模块。以下是一个简单的示例:
import math# 计算45度(弧度制表示)的正弦值
x_in_degrees = 45
x_in_radians = math.radians(x_in_degrees) # 将角度转换为弧度sin_value = math.sin(x_in_radians)
print(sin_value) # 输出正弦值
注意,math.sin() 函数接受的是弧度制的角度,而不是度数。如果你有一个度数值并希望计算其正弦值,你需要使用 math.radians() 函数将其转换为弧度。
对于上述代码,输出将接近于 0.7071067811865476,这是 45 度(在弧度制下表示为 math.pi / 4)的正弦值。
如果你需要处理复数或者矩阵中的元素,你可能需要使用 numpy 库中的 numpy.sin() 函数,它支持数组和矩阵操作,并且对于复数也有效。例如:
import numpy as np# 计算45度(弧度制表示)的正弦值
x_in_degrees = 45
x_in_radians = np.radians(x_in_degrees) # 将角度转换为弧度sin_value = np.sin(x_in_radians)
print(sin_value) # 输出正弦值
在这种情况下,sin_value 将是一个标量值,因为我们只对单个角度进行了操作。但是,如果 x_in_radians 是一个 numpy 数组,np.sin() 将会对数组中的每个元素进行正弦计算。
math.tan(x)
math.tan(x) 是 Python 中 math 模块的一个函数,用于计算给定角度 x 的正切值。与 math.sin(x) 和 math.cos(x) 类似,这里的 x 应该是一个以弧度为单位的角,而不是度。
在使用 math.tan(x) 之前,你也需要先导入 math 模块。下面是一个简单的示例:
import math# 计算45度(弧度制表示)的正切值
x_in_degrees = 45
x_in_radians = math.radians(x_in_degrees) # 将角度转换为弧度tan_value = math.tan(x_in_radians)
print(tan_value) # 输出正切值
输出将接近于 1.0,这是 45 度(在弧度制下表示为 math.pi / 4)的正切值。
请注意,math.tan(x) 的结果可能是无穷大(对于 (2k+1) * math.pi / 2 的 x 值,其中 k 是整数),或者是未定义(对于 k * math.pi 的 x 值)。这是因为正切函数在这些点上不存在或无穷大。
对于需要处理复数或者数组中的元素的情况,你可以使用 numpy 库中的 numpy.tan() 函数,如下所示:
import numpy as np# 计算45度(弧度制表示)的正切值
x_in_degrees = 45
x_in_radians = np.radians(x_in_degrees) # 将角度转换为弧度tan_value = np.tan(x_in_radians)
print(tan_value) # 输出正切值
在这个例子中,tan_value 将是一个标量值,因为我们只对单个角度进行了操作。如果 x_in_radians 是一个 numpy 数组,np.tan() 将会对数组中的每个元素计算正切值。
math.degrees(x)
math.degrees(x) 是 Python 中 math 模块的一个函数,它用于将弧度转换为度数。x 参数应该是一个以弧度为单位的角,函数将返回对应的以度数为单位的角。
这里是一个简单的例子,展示了如何使用 math.degrees() 函数:
import math# 假设我们有一个以弧度为单位的角
radians = math.pi / 4# 将弧度转换为度数
degrees = math.degrees(radians)print(degrees) # 输出 45.0
在这个例子中,我们有一个以弧度为单位的角(即 π/4,它等于 45 度),我们使用 math.degrees() 函数将其转换为度数,并打印出结果,输出将是 45.0。
这个函数在处理三角函数时特别有用,尤其是当你需要在度数和弧度之间转换时。例如,你可能使用 math.radians() 来将角度转换为弧度,然后使用 math.sin(), math.cos(), math.tan() 等函数进行计算,最后使用 math.degrees() 将结果转换回度数。
math.radians(x)
math.radians(x) 是 Python 中 math 模块的一个函数,用于将角度 x 从度数转换为弧度。当你在使用三角函数(如 math.sin(), math.cos(), math.tan() 等)时,这些函数期望的输入是以弧度为单位的,而不是以度数为单位。因此,如果你有一个以度数为单位的角,并且想要计算它的三角函数值,你需要先使用 math.radians() 将它转换为弧度。
下面是一个简单的例子,展示了如何使用 math.radians() 函数:
import math# 假设我们有一个以度数为单位的角
degrees = 45# 将度数转换为弧度
radians = math.radians(degrees)print(radians) # 输出转换后的弧度值
输出将是 0.7853981633974483,这是 45 度转换为弧度的结果。
在编写涉及三角函数的代码时,始终记住输入到这些函数中的角度应该是以弧度为单位的。如果你有一个以度数为单位的角,使用 math.radians() 进行转换是一个好习惯,这样可以避免计算错误。
下面是一个更完整的例子,它计算了一个以度数为单位的角的正弦值:
import math# 假设我们有一个以度数为单位的角
degrees = 45# 将度数转换为弧度
radians = math.radians(degrees)# 计算正弦值
sin_value = math.sin(radians)print(sin_value) # 输出正弦值
在这个例子中,我们首先使用 math.radians() 将角度从度数转换为弧度,然后使用 math.sin() 计算转换后的角的正弦值。
math.acosh(x)
math.acosh(x) 是 Python 中 math 模块的一个函数,用于计算给定数值 x 的反双曲余弦值(也称为双曲余弦的逆函数)。反双曲余弦函数是双曲余弦函数 math.cosh(x) 的逆运算。
双曲余弦函数 cosh(x) 定义为 (exp(x) + exp(-x)) / 2,其中 exp(x) 是自然指数函数。反双曲余弦函数 acosh(x) 则满足 cosh(acosh(x)) = x。
math.acosh(x) 的输入 x 必须大于或等于 1,因为双曲余弦函数 cosh(x) 在 x >= 0 的范围内是增函数,并且 cosh(0) = 1。因此,acosh(x) 的定义域为 [1, +∞)。
以下是一个使用 math.acosh() 的示例:
import math# 计算反双曲余弦值
x = 2
acosh_value = math.acosh(x)print(acosh_value) # 输出反双曲余弦值
输出将是 acosh(2) 的值,它大于 0 但小于 math.pi,因为 cosh(math.pi/2) = math.sqrt(2)。
需要注意的是,math.acosh() 只接受单个数值作为输入,并且返回单个数值作为输出。如果你需要处理数组或矩阵中的元素,你可能需要使用像 numpy 这样的科学计算库,它提供了 numpy.arccosh() 函数来处理多维数组。
例如,使用 numpy 计算反双曲余弦值:
import numpy as np# 计算数组元素的反双曲余弦值
x = np.array([1, 2, 3])
acosh_values = np.arccosh(x)print(acosh_values) # 输出数组元素的反双曲余弦值
这将输出一个数组,包含每个对应元素的反双曲余弦值。
math.asinh(x)
math.asinh(x) 是 Python 中 math 模块的一个函数,用于计算给定数值 x 的反双曲正弦值(也称为双曲正弦的逆函数)。反双曲正弦函数是双曲正弦函数 math.asinh(x) 或 math.sinh(x) 的逆运算。
双曲正弦函数 sinh(x) 定义为 (exp(x) - exp(-x)) / 2,其中 exp(x) 是自然指数函数。反双曲正弦函数 asinh(x) 则满足 sinh(asinh(x)) = x。
math.asinh(x) 的输入 x 可以是任何实数,包括负数。它的值域为整个实数轴,即 (-∞, +∞)。
以下是一个使用 math.asinh() 的示例:
import math# 计算反双曲正弦值
x = 0.5
asinh_value = math.asinh(x)print(asinh_value) # 输出反双曲正弦值
输出将是 0.5 的反双曲正弦值,它位于 0 和 math.pi/2 之间。
同样地,如果你需要处理数组或矩阵中的元素,你可以使用 numpy 库的 numpy.arcsinh() 函数。例如:
import numpy as np# 计算数组元素的反双曲正弦值
x = np.array([0, 0.5, 1])
asinh_values = np.arcsinh(x)print(asinh_values) # 输出数组元素的反双曲正弦值
这将输出一个数组,包含每个对应元素的反双曲正弦值。
math.atanh(x)
math.atanh(x) 是 Python 中 math 模块的一个函数,用于计算给定数值 x 的反双曲正切值(也称为双曲正切的逆函数)。反双曲正切函数是双曲正切函数 math.tanh(x) 的逆运算。
双曲正切函数 tanh(x) 定义为 (exp(x) - exp(-x)) / (exp(x) + exp(-x)),其中 exp(x) 是自然指数函数。反双曲正切函数 atanh(x) 则满足 tanh(atanh(x)) = x。
math.atanh(x) 的输入 x 必须在 -1 和 1 之间(包括 -1 和 1),因为 tanh(x) 的值域是 [-1, 1]。因此,atanh(x) 的定义域为 [-1, 1]。
以下是一个使用 math.atanh() 的示例:
import math# 计算反双曲正切值
x = 0.5
atanh_value = math.atanh(x)print(atanh_value) # 输出反双曲正切值
输出将是 0.5 的反双曲正切值,它位于 0 和 math.pi/2 之间。
同样地,如果你需要处理数组或矩阵中的元素,你可以使用 numpy 库的 numpy.arctanh() 函数。例如:
import numpy as np# 计算数组元素的反双曲正切值
x = np.array([-0.5, 0, 0.5])
atanh_values = np.arctanh(x)print(atanh_values) # 输出数组元素的反双曲正切值
这将输出一个数组,包含每个对应元素的反双曲正切值。
请注意,math.atanh() 只接受单个数值作为输入,并且返回单个数值作为输出。如果你需要处理向量或矩阵,使用 numpy 会更加方便和高效。
相关文章:
)
math模块篇(七)
文章目录 math.dist(p, q)math.hypot(*coordinates)math.sin(x)math.tan(x)math.degrees(x)math.radians(x)math.acosh(x)math.asinh(x)math.atanh(x) math.dist(p, q) 在Python的math模块中,并没有一个名为math.dist(p, q)的函数。可能你是想要计算两点p和q之间的…...

wordpress插件,免费的wordpress插件
WordPress作为世界上最受欢迎的内容管理系统之一,拥有庞大的插件生态系统,为用户提供了丰富的功能扩展。在内容创作和SEO优化方面,有一类特殊的插件是自动生成原创文章并自动发布到WordPress站点的工具。这些插件能够帮助用户节省时间和精力&…...
Remote Desktop Manager for Mac:远程桌面管理软件
Remote Desktop Manager for Mac,是远程桌面管理的理想之选。它集成了多种远程连接技术,无论是SSH、RDP还是VNC,都能轻松应对,让您随时随地安全访问远程服务器和工作站。 软件下载:Remote Desktop Manager for Mac下载…...

如何撰写研究论文
SEVENTYFOUR/SHUTTERSTOCK 即使对于有经验的作家来说,将数月或数年的研究浓缩到几页纸中也是一项艰巨的任务。作者需要在令人信服地解决他们的科学问题和详细地呈现他们的结果之间找到最佳平衡点,以至于丢失了关键信息。他们必须简明扼要地描述他们的方…...
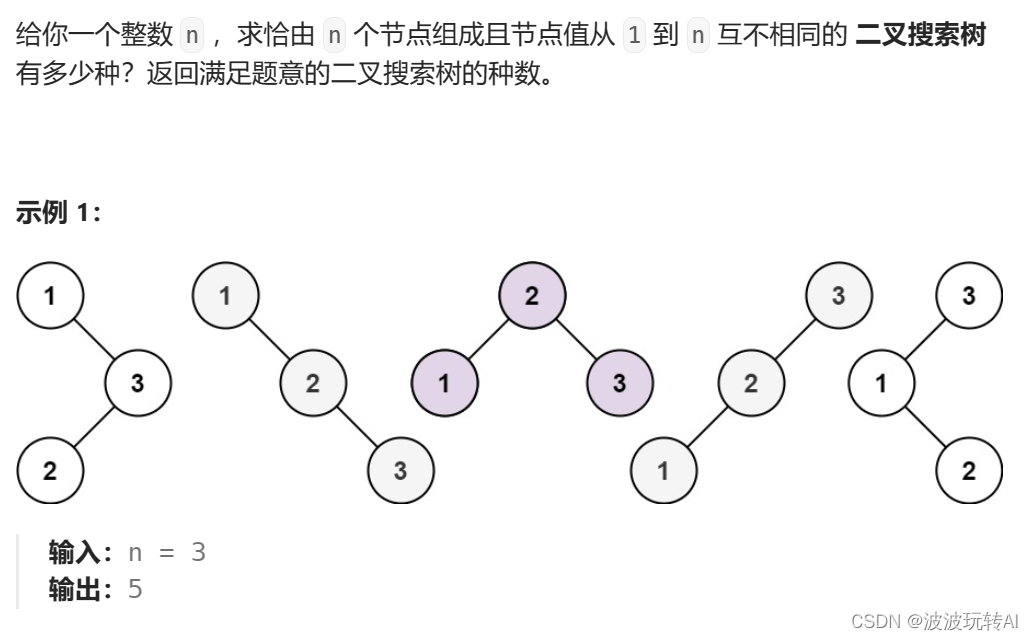
数据结构
一、栈 先进后出 二、队列 先进先出 三、数组 查询快,增加修改慢 四、链表 查询慢,增加修改慢 五、二叉树 节点: 查找二叉树 二叉查找树的特点 二叉查找树,又称二叉排序树或者二叉搜索树 每一个节点上最多有两个子节点 左子树上所…...
动态规划相关题目
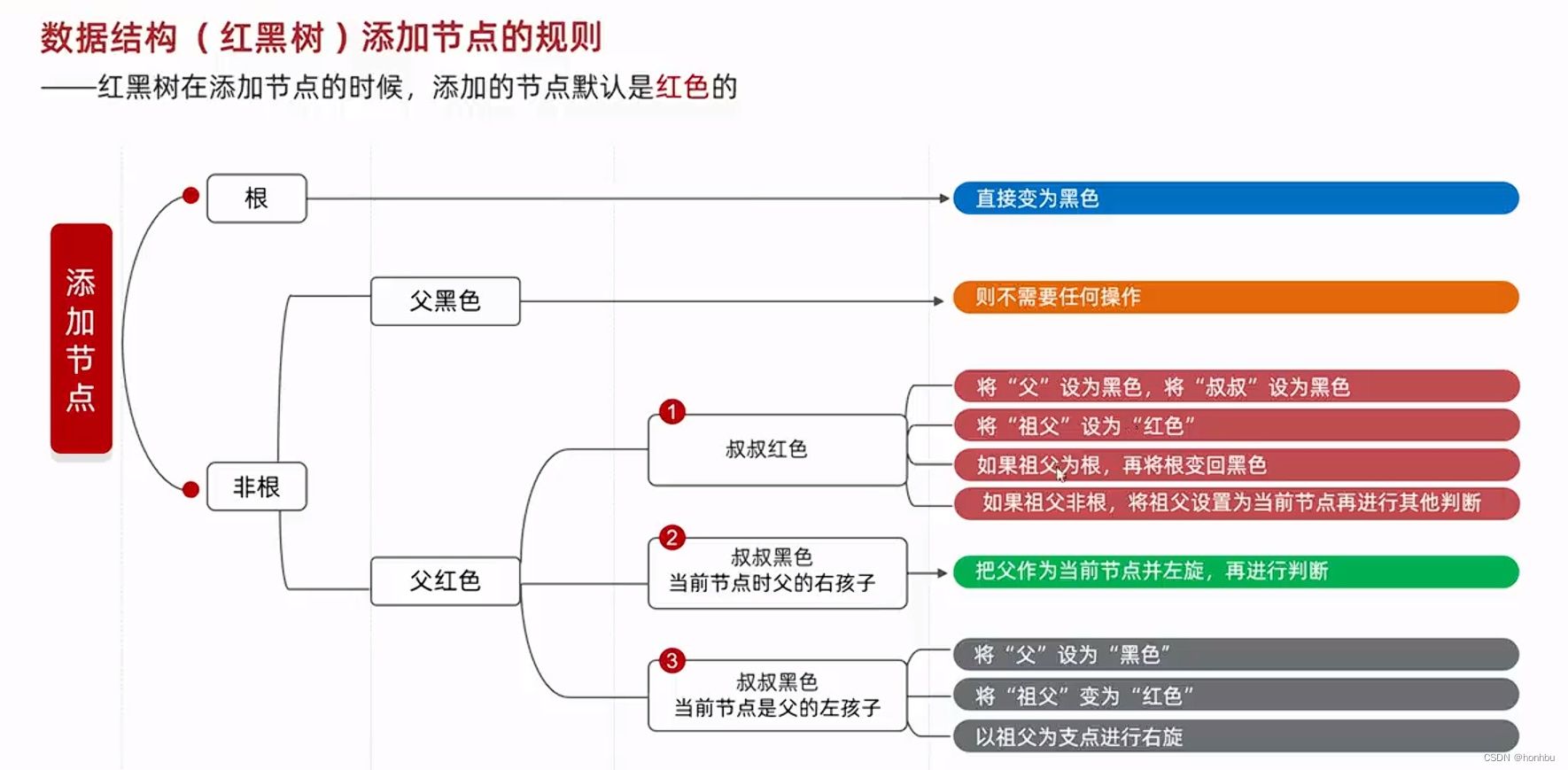
文章目录 1.动态规划理论基础2.斐波那契数3.爬楼梯4.使用最小花费爬楼梯5.不同路径6.不同路径 II7. 整数拆分8. 不同的二叉搜索树 1.动态规划理论基础 1.1 什么是动态规划? 动态规划,英文:Dynamic Programming,简称DP,如果某一…...
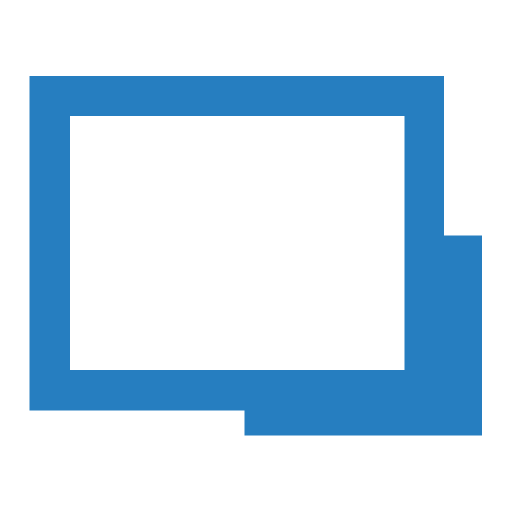
iOS - Runtime - Class-方法缓存(cache_t)
文章目录 iOS - Runtime - Class-方法缓存(cache_t)1. 散列表的存取值 iOS - Runtime - Class-方法缓存(cache_t) Class内部结构中有个方法缓存(cache_t),用散列表(哈希表)来缓存曾经调用过的方法,可以提高…...

2014年认证杯SPSSPRO杯数学建模B题(第一阶段)位图的处理算法全过程文档及程序
2014年认证杯SPSSPRO杯数学建模 B题 位图的处理算法 原题再现: 图形(或图像)在计算机里主要有两种存储和表示方法。矢量图是使用点、直线或多边形等基于数学方程的几何对象来描述图形,位图则使用像素来描述图像。一般来说&#…...

【物联网项目】基于ESP8266的家庭灯光与火情智能监测系统——文末完整工程资料源码
目录 系统介绍 硬件配置 硬件连接图 系统分析与总体设计 系统硬件设计 ESP8266 WIFI开发板 人体红外传感器模块 光敏电阻传感器模块 火焰传感器模块 可燃气体传感器模块 温湿度传感器模块 OLED显示屏模块 系统软件设计 温湿度检测模块 报警模块 OLED显示模块 …...

Unity中控制帧率的思考
如何控制帧率: 在Unity中,你可以通过设置Application.targetFrameRate来限制帧率。 例如,如果你想将帧率限制为16帧, 你可以在你的代码中添加以下行: Application.targetFrameRate 16; 通常,这行代码会放在…...

阿里云子域名配置,且不带端口访问
进入阿里云控制台,创建一个SSL证书 # 域名名称child.domain.com创建完成后,将返回主机记录以及记录值,保存好,用于下一步使用 创建DNS解析 创建DNS的TXT类型解析 选择记录类型:TXT 填写主机记录:_dnsa…...

C#-ConcurrentDictionary用于多线程并发字典
ConcurrentDictionary 是 .NET Framework 中用于多线程并发操作的一种线程安全的字典集合类。它提供了一种在多个线程同时访问和修改字典时保持数据一致性的机制。 以下是 ConcurrentDictionary 类的一些重要特性和用法: 线程安全性:ConcurrentDictiona…...

深入探讨多线程编程:从0-1为您解释多线程(下)
文章目录 6. 死锁6.1 死锁原因 6.2 避免死锁的方法加锁顺序一致性。超时机制。死锁检测和解除机制。 6. 死锁 6.1 死锁 原因 系统资源的竞争:(产生环路)当系统中供多个进程共享的资源数量不足以满足进程的需要时,会引起进程对2…...
深度学习pytorch——减少过拟合的几种方法(持续更新)
1、增加数据集 2、正则化(Regularization) 正则化:得到一个更加简单的模型的方法。 以一个多项式为例: 随着最高次的增加,会得到一个更加复杂模型,模型越复杂就会更好的拟合输入数据的模型(图-1)&#…...

排序第五篇 归并排序
一 简介 归并排序(Merge Sort) 的基本思想是: 首先将待排序文件看成 n n n 个长度为1的有序子文件, 把这些子文件两两归并, 得到 n 2 \frac{n}{2} 2n 个长度为 2 的有序子文件; 然后再把这 n 2 \frac{n}{2} 2n 个有序的子…...
【Win】使用PowerShell和Webhooks轻松发送消息至Microsoft Teams
Microsoft Teams是一款由微软开发的团队协作和通讯工具。如果您对这个名字还不太熟悉,那么现在就是一个了解它的好时机。微软将Teams定位为其之前Skype for Business解决方案的继任者,并且它也提供了与其他基于频道的通讯应用程序(例如Slack、…...

ESCTF-OSINT赛题WP
这你做不出来?check ESCTF{湖北大学_嘉会园食堂} 这个识图可以发现是 淡水渔人码头 但是 osint 你要发现所有信息 聊天记录说国外 同时 提示给了美国 你综合搜索 美国 渔人码头 在美国旧金山的渔人码头(英语:Fisherman’s Wharf)是一个著名旅…...

2024蓝桥杯省赛保奖突击班-Day2-前缀和、差分、尺取_笔记_练习题解
3月25日-课堂笔记 前缀和预处理 O ( n ) \mathcal{O}(n) O(n) s[1] a[1]; for(int i 2; i < n; i)s[i] s[i - 1] a[i];利用前缀和查询区间和 O ( 1 ) O(1) O(1) long long calc(int l, int r) {return l 1 ? s[r] : s[r] - s[l - 1]; }差分序列的求法 c[1] a[…...

C++基础之虚函数(十七)
一.什么是多态 多态是在有继承关系的类中,调用同一个指令(函数),不同对象会有不同行为。 二.什么是虚函数 概念:首先虚函数是存在于类的成员函数中,通过virtual关键字修饰的成员函数叫虚函数。 性质&am…...

快速入门Kotlin①基本语法
前言 23年底读了一遍“Kotlin官方文档”,官方文档大而全,阅读下来,大有裨益。 此系列文章的目的是记录学习进程,同时,若能让读者迅速掌握重点内容并快速上手,那就再好不过了。 函数 带有两个 Int 参数、…...

十分钟速通:GO、KEGG、COG注释与富集分析的实战指南
1. 从测序数据到功能注释的快速通道 刚拿到高通量测序数据的同学,面对海量基因序列时总会陷入迷茫:这些基因到底有什么功能?它们参与了哪些生物过程?这时候GO、KEGG和COG三大注释工具就是你的"基因翻译官"。我处理过上百…...

终极指南:NoSQL数据库大全awesome-bigdata - 文档型数据库实战入门 [特殊字符]
终极指南:NoSQL数据库大全awesome-bigdata - 文档型数据库实战入门 🚀 【免费下载链接】awesome-bigdata A curated list of awesome big data frameworks, ressources and other awesomeness. 项目地址: https://gitcode.com/gh_mirrors/aw/awesome-b…...

魔兽争霸3终极优化指南:12个免费插件让你的经典游戏焕发新生
魔兽争霸3终极优化指南:12个免费插件让你的经典游戏焕发新生 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸3在现代电脑上…...

英雄联盟专业视频编辑器:用League Director制作电影级游戏录像的完整指南
英雄联盟专业视频编辑器:用League Director制作电影级游戏录像的完整指南 【免费下载链接】leaguedirector League Director is a tool for staging and recording videos from League of Legends replays 项目地址: https://gitcode.com/gh_mirrors/le/leaguedir…...

从理论到落地,一文读懂现代AI Agent的完整记忆流水线
来源:DeepHub IMBA 本文约6500字,建议阅读13分钟本文介绍 AI Agent 四大记忆分类与流水线,解析生产架构、选型方案及常见落地误区。每一次 LLM 调用都是无状态的。模型读上下文窗口,生成响应然后忘掉一切。这对单轮问答没问题。对…...

【ElevenLabs企业级语音AI落地指南】:20年音视频架构师亲授——3大合规陷阱、4类集成断点、1套可审计部署框架
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs Enterprise方案全景认知 ElevenLabs Enterprise 是面向中大型组织构建的语音合成与语音智能平台,提供高保真、低延迟、多语言、可定制的语音生成能力,并深度集成企业…...

CSS 容器查询完全指南
CSS 容器查询完全指南 引言 CSS 容器查询(Container Queries)是 CSS 规范中的一项革命性特性,它允许开发者根据容器的尺寸而非视口尺寸来应用样式。本文将深入探讨容器查询的各种用法和高级技巧。 基础概念回顾 容器查询 vs 媒体查询 特…...

新手也能看懂的SQL注入绕过实战:以BUUCTF的BabySQL靶场为例,手把手教你双写绕过
从零破解BabySQL:双写绕过的艺术与科学 当你第一次接触CTF比赛中的SQL注入题目时,那种既兴奋又困惑的感觉一定记忆犹新。面对BabySQL这样的靶场,新手常会遇到一个典型困境:明明知道应该用union select来获取数据,却发现…...

从通信原理到Verilog:一个约束长度7的卷积码编码器是如何炼成的?
从通信原理到Verilog:一个约束长度7的卷积码编码器是如何炼成的? 在数字通信系统的设计中,纠错编码技术如同隐形的守护者,确保数据在嘈杂信道中可靠传输。卷积码因其优异的纠错性能和简洁的编码结构,成为卫星通信、深空…...

Obsidian-Templates:卡片盒笔记法的终极模板库,构建你的第二大脑
Obsidian-Templates:卡片盒笔记法的终极模板库,构建你的第二大脑 【免费下载链接】Obsidian-Templates A repository containing templates and scripts for #Obsidian to support the #Zettelkasten method for note-taking. 项目地址: https://gitco…...