【STM32 HAL库SPI/QSPI协议学习,基于外部Flash读取。】
1、SPI协议
简介
SPI 协议是由摩托罗拉公司提出的通讯协议 (Serial Peripheral Interface),即串行外围设备接口,是
一种高速全双工的通信总线。它被广泛地使用在 ADC、LCD 等设备与 MCU 间,要求通讯速率
较高的场合。
SPI 物理层
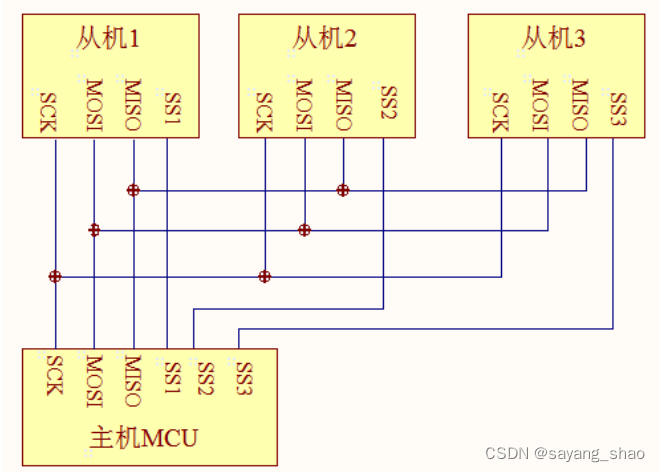 SPI 通讯使用 3 条总线及片选线,3 条总线分别为 SCK、MOSI、MISO,片选线为 SS。
SPI 通讯使用 3 条总线及片选线,3 条总线分别为 SCK、MOSI、MISO,片选线为 SS。
1、SS*(* Slave Select):从设备选择信号线,常称为片选信号线,也称为 NSS、CS。
2、SCK (Serial Clock):时钟信号线,用于通讯数据同步。它由通讯主机产生,决定了通讯的速率,不同的设备支持的最高时钟频率不一样,如 STM32 的 SPI 时钟频率最大为 fpclk/2,两个设备之间通讯时,通讯速率受限于低速设备。
3、MOSI (Master Output,Slave Input):主设备输出/从设备输入引脚。主机的数据从这条信号线输出,从机由这条信号线读入主机发送的数据,即这条线上数据的方向为主机到从机。
4、MISO(Master Input,,Slave Output):主设备输入/从设备输出引脚。主机从这条信线读入数据,
从机的数据由这条信号线输出到主机,即在这条线上数据的方向为从机到主机。
协议层
与 I2C 的类似,SPI 协议定义了通讯的起始和停止信号、数据有效性、时钟同步等环节。
时序图
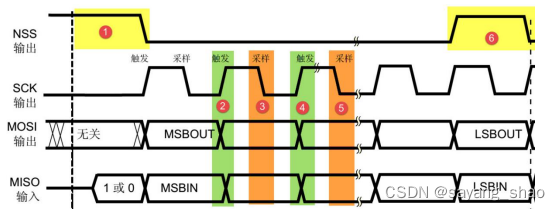 NSS、SCK、MOSI 信号都由主机控制产生,而 MISO 的信号由从机产生,主机通过该信号线读取从机的数据。MOSI 与 MISO 的信号只在 NSS 为低电平的时候才有效,在 SCK 的每个时钟周期 MOSI 和 MISO 传输一位数据。
NSS、SCK、MOSI 信号都由主机控制产生,而 MISO 的信号由从机产生,主机通过该信号线读取从机的数据。MOSI 与 MISO 的信号只在 NSS 为低电平的时候才有效,在 SCK 的每个时钟周期 MOSI 和 MISO 传输一位数据。
通讯的起始和停止信号
在图中的标号处**,NSS 信号线由高变低,是 SPI 通讯的起始信号**。
NSS 是每个从机各自独占的信号线,当从机在自己的 NSS 线检测到起始信号后,就知道自己被主机选了,开始准备与主机通讯。在图中的标号处,NSS 信号由低变高,是 SPI 通讯的停止信号,表示本次通讯结束,从机的选中状态被取消。
数据有效性
1、SPI 使用 MOSI 及 MISO 信号线来传输数据,使用 SCK 信号线进行数据同步。
2、MOSI 及 MISO 数据线在 SCK 的每个时钟周期传输一位数据,且数据输入输出是同时进行的。数据传输时,MSB先行或 LSB 先行并没有作硬性规定,但要保证两个 SPI 通讯设备之间使用同样的协定,一般都会采用图 中的 MSB 先行模式。
3、观察图中的标号处,MOSI 及 MISO 的数据在 SCK 的上升沿期间变化输出,在 SCK 的下降沿时被采样。即在 SCK 的下降沿时刻,MOSI 及 MISO 的数据有效,高电平时表示数据“1”,为低电平时表示数据“0”。在其它时刻,数据无效,MOSI 及 MISO 为下一次表示数据做准备。
4、SPI 每次数据传输可以 8 位或 16 位为单位,每次传输的单位数不受限制。
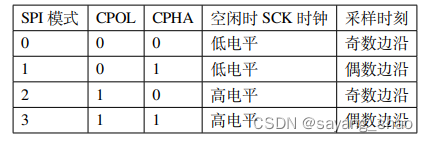
CPOL/CPHA 及通讯模式
STM32 SPI系统架构
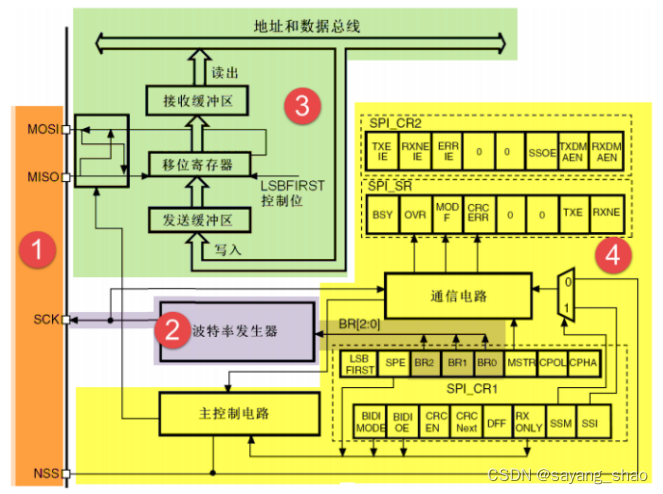 STM32 的 SPI 外设可用作通讯的主机及从机,支持最高的 SCK 时钟频率为 fpclk/2 (STM32F103 型
STM32 的 SPI 外设可用作通讯的主机及从机,支持最高的 SCK 时钟频率为 fpclk/2 (STM32F103 型
号的芯片默认 f:sub:pclk1 为 42MHz(407)45Mhz(429),fpclk2 为 84MHz(407) 90Mhz(429)),完全支持 SPI 协议的 4 种模式,数据帧长度可设置为 8 位或 16 位,可设置数据 MSB 先行或 LSB 先行。它还支持双线全双工 (前面小节说明的都是这种模式)、双线单向以及单线模式。其中双线单向模式可以同时使用 MOSI 及 MISO 数据线向一个方向传输数据,可以加快一倍的传输速度。而单线模式则可以减少硬件接线,当然这样速率会受到影响。我们只讲解双线全双工模式。
2、SPI使用
HAL库SPI结构体成员
/*** @brief SPI handle Structure definition*/
typedef struct __SPI_HandleTypeDef
{SPI_TypeDef *Instance; /*!< SPI registers base address */SPI_InitTypeDef Init; /*!< SPI communication parameters */uint8_t *pTxBuffPtr; /*!< Pointer to SPI Tx transfer Buffer */uint16_t TxXferSize; /*!< SPI Tx Transfer size */__IO uint16_t TxXferCount; /*!< SPI Tx Transfer Counter */uint8_t *pRxBuffPtr; /*!< Pointer to SPI Rx transfer Buffer */uint16_t RxXferSize; /*!< SPI Rx Transfer size */__IO uint16_t RxXferCount; /*!< SPI Rx Transfer Counter */void (*RxISR)(struct __SPI_HandleTypeDef *hspi); /*!< function pointer on Rx ISR */void (*TxISR)(struct __SPI_HandleTypeDef *hspi); /*!< function pointer on Tx ISR */DMA_HandleTypeDef *hdmatx; /*!< SPI Tx DMA Handle parameters */DMA_HandleTypeDef *hdmarx; /*!< SPI Rx DMA Handle parameters */HAL_LockTypeDef Lock; /*!< Locking object */__IO HAL_SPI_StateTypeDef State; /*!< SPI communication state */__IO uint32_t ErrorCode; /*!< SPI Error code */#if (USE_HAL_SPI_REGISTER_CALLBACKS == 1U)void (* TxCpltCallback)(struct __SPI_HandleTypeDef *hspi); /*!< SPI Tx Completed callback */void (* RxCpltCallback)(struct __SPI_HandleTypeDef *hspi); /*!< SPI Rx Completed callback */void (* TxRxCpltCallback)(struct __SPI_HandleTypeDef *hspi); /*!< SPI TxRx Completed callback */void (* TxHalfCpltCallback)(struct __SPI_HandleTypeDef *hspi); /*!< SPI Tx Half Completed callback */void (* RxHalfCpltCallback)(struct __SPI_HandleTypeDef *hspi); /*!< SPI Rx Half Completed callback */void (* TxRxHalfCpltCallback)(struct __SPI_HandleTypeDef *hspi); /*!< SPI TxRx Half Completed callback */void (* ErrorCallback)(struct __SPI_HandleTypeDef *hspi); /*!< SPI Error callback */void (* AbortCpltCallback)(struct __SPI_HandleTypeDef *hspi); /*!< SPI Abort callback */void (* MspInitCallback)(struct __SPI_HandleTypeDef *hspi); /*!< SPI Msp Init callback */void (* MspDeInitCallback)(struct __SPI_HandleTypeDef *hspi); /*!< SPI Msp DeInit callback */#endif /* USE_HAL_SPI_REGISTER_CALLBACKS */
} SPI_HandleTypeDef;
HAL库函数
HAL_StatusTypeDef HAL_SPI_Init(SPI_HandleTypeDef *hspi); //初始化函数
HAL_StatusTypeDef HAL_SPI_DeInit(SPI_HandleTypeDef *hspi); //默认初始化函数
__weak void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi); //初始化回调函数
__weak void HAL_SPI_MspDeInit(SPI_HandleTypeDef *hspi); //默认初始化回调函数
HAL_StatusTypeDef HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout); //发送函数
HAL_StatusTypeDef HAL_SPI_Receive(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout); //接收函数
HAL_StatusTypeDef HAL_SPI_TransmitReceive(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData, uint16_t Size,uint32_t Timeout); //接收,发送
HAL_StatusTypeDef HAL_SPI_Transmit_IT(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size); //中断发送
HAL_StatusTypeDef HAL_SPI_Receive_IT(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size) //中断接收
HAL_StatusTypeDef HAL_SPI_TransmitReceive_IT(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData, uint16_t Size,uint32_t Timeout); //中断接收发送
HAL_StatusTypeDef HAL_SPI_Transmit_DMA(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size); //DMA发送
HAL_StatusTypeDef HAL_SPI_Receive_DMA(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size) //DMA接收
HAL_StatusTypeDef HAL_SPI_TransmitReceive_DMA(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData,uint16_t Size); //DMA发送接收
HAL_StatusTypeDef HAL_SPI_Abort(SPI_HandleTypeDef *hspi); //我不知道干啥的,知道的给我说,字面意思说是中止SPI。
HAL_StatusTypeDef HAL_SPI_Abort_IT(SPI_HandleTypeDef *hspi); // 我不知道干啥的
HAL_StatusTypeDef HAL_SPI_DMAPause(SPI_HandleTypeDef *hspi); //暂停DMA
HAL_StatusTypeDef HAL_SPI_DMAStop(SPI_HandleTypeDef *hspi); //停止DMA
void HAL_SPI_IRQHandler(SPI_HandleTypeDef *hspi); //中断服务函数
HAL_SPI_StateTypeDef HAL_SPI_GetState(SPI_HandleTypeDef *hspi); //获取SPI状态函数
uint32_t HAL_SPI_GetError(SPI_HandleTypeDef *hspi); //获取SPI错误代码函数
__weak void HAL_SPI_RxCpltCallback(SPI_HandleTypeDef *hspi); //接收完成回调
__weak void HAL_SPI_TxCpltCallback(SPI_HandleTypeDef *hspi); //发送完成回调
__weak void HAL_SPI_ErrorCallback(SPI_HandleTypeDef *hspi); //错误回调3、QSPI协议
QSPI是Queued SPI的简写,是Motorola公司推出的SPI接口的扩展,比SPI应用更加广泛。在SPI协议的基础上,Motorola公司对其功能进行了增强,增加了队列传输机制,推出了队列串行外围接口协议(即QSPI协议)。QSPI 是一种专用的通信接口,连接单、双或四(条数据线) SPI Flash 存储介质。
STM32上加 QUADSPI。
1、间接模式:在这个模式下,所有的操作都是通过QSPI寄存器来执行的。这意味着数据的传输和接收都需要通过寄存器来进行中转。
2、状态轮询模式:在这种模式下,外部Flash的状态寄存器会被周期性地读取,当某些标志位(如擦除或烧写完成的标志位)置为1时,会产生中断,从而通知控制器进行相应的处理。
3、内存映射模式:在内存映射模式下,外部Flash被映射到微控制器的地址空间,系统将其视为内部存储器的一部分。这种方式可以让处理器直接访问Flash存储空间,就像访问内部RAM一样。
QSPI通常使用6个信号线连接Flash,包括四个数据线(BK1_IO0~BK1_IO3)、一个时钟输出(CLK)和一个片选输出(低电平有效,BK1_nCS)。这些信号线的作用是实现与SPI Flash存储介质的通信。
采用双闪存模式时,将同时访问两个 Quad-SPI Flash,吞吐量和容量均可提高二倍。
QSPI功能框图
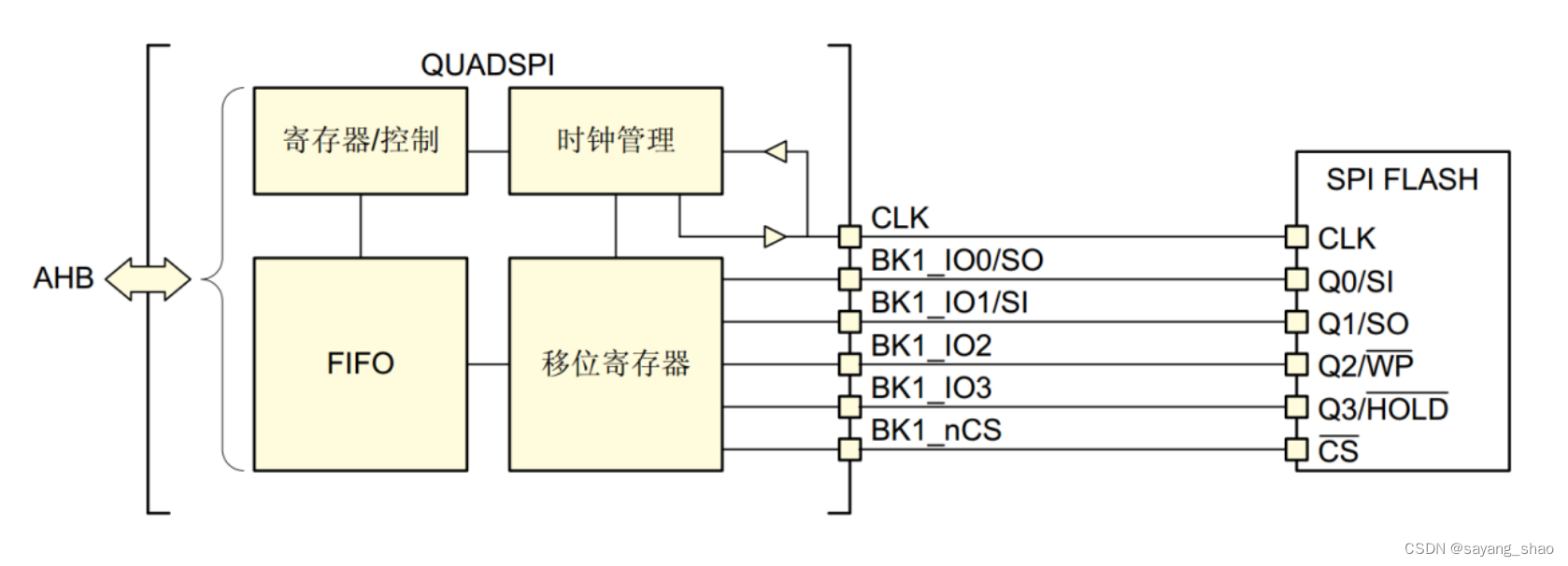
1、BK1_nCS:片选输出(低电平有效),适用于 FLASH 1。如果 QSPI 始终在双闪存模式下工
作,则其也可用于 FLASH 2 从设备选择信号线。QSPI 通讯以 BK1_nCS 线置低电平为开始信号,以 BK1_nCS 线被拉高作为结束信号。
2、CLK:时钟输出,适用于两个存储器,用于通讯数据同步。它由通讯主机产生,决定了通讯的速率,不同的设备支持的最高时钟频率不一样,如 STM32 的 QSPI 时钟频率最大为 fpclk/2,两个设备之间通讯时,通讯速率受限于低速设备。
3、BK1_IO0:在双线 / 四线模式中为双向 IO,单线模式中为串行输出,适用于 FLASH 1。
4、BK1_IO1:在双线 / 四线模式中为双向 IO,单线模式中为串行输入
5、BK1_IO2:在四线模式中为双向 IO
6、BK1_IO3:在四线模式中为双向 IO
QSPI命令序列
QUADSPI 通过命令与 Flash 通信每条命令包括指令、地址、交替字节、空指令和数据这五个阶段任一阶段均可跳过,但至少要包含指令、地址、交替字节或数据阶段之一。nCS 在每条指令开始前下降,在每条指令完成后再次上升。
QSPI命令序列时序
 四线模式读命令时序
四线模式读命令时序
QUADSPI 信号接口协议模式
1、单线SPI模式
2、双线SPI模式
3、四线SPI模式
以上模式在这有介绍,慢慢看。
4、SDR模式
5、DDR模式
6、双闪存模式
QSPI使用
QSPI HAL库 结构体
/*** @brief QSPI Handle Structure definition*/
#if (USE_HAL_QSPI_REGISTER_CALLBACKS == 1)
typedef struct __QSPI_HandleTypeDef
#else
typedef struct
#endif
{QUADSPI_TypeDef *Instance; /* QSPI registers base address */QSPI_InitTypeDef Init; /* QSPI communication parameters */uint8_t *pTxBuffPtr; /* Pointer to QSPI Tx transfer Buffer */__IO uint32_t TxXferSize; /* QSPI Tx Transfer size */__IO uint32_t TxXferCount; /* QSPI Tx Transfer Counter */uint8_t *pRxBuffPtr; /* Pointer to QSPI Rx transfer Buffer */__IO uint32_t RxXferSize; /* QSPI Rx Transfer size */__IO uint32_t RxXferCount; /* QSPI Rx Transfer Counter */MDMA_HandleTypeDef *hmdma; /* QSPI Rx/Tx MDMA Handle parameters */__IO HAL_LockTypeDef Lock; /* Locking object */__IO HAL_QSPI_StateTypeDef State; /* QSPI communication state */__IO uint32_t ErrorCode; /* QSPI Error code */uint32_t Timeout; /* Timeout for the QSPI memory access */
#if (USE_HAL_QSPI_REGISTER_CALLBACKS == 1)void (* ErrorCallback) (struct __QSPI_HandleTypeDef *hqspi);void (* AbortCpltCallback) (struct __QSPI_HandleTypeDef *hqspi);void (* FifoThresholdCallback)(struct __QSPI_HandleTypeDef *hqspi);void (* CmdCpltCallback) (struct __QSPI_HandleTypeDef *hqspi);void (* RxCpltCallback) (struct __QSPI_HandleTypeDef *hqspi);void (* TxCpltCallback) (struct __QSPI_HandleTypeDef *hqspi);void (* StatusMatchCallback) (struct __QSPI_HandleTypeDef *hqspi);void (* TimeOutCallback) (struct __QSPI_HandleTypeDef *hqspi);void (* MspInitCallback) (struct __QSPI_HandleTypeDef *hqspi);void (* MspDeInitCallback) (struct __QSPI_HandleTypeDef *hqspi);
#endif
}QSPI_HandleTypeDef;其它功能结构体
/*** @brief QSPI Command structure definition*/
typedef struct
{uint32_t Instruction; /* Specifies the Instruction to be sentThis parameter can be a value (8-bit) between 0x00 and 0xFF */uint32_t Address; /* Specifies the Address to be sent (Size from 1 to 4 bytes according AddressSize)This parameter can be a value (32-bits) between 0x0 and 0xFFFFFFFF */uint32_t AlternateBytes; /* Specifies the Alternate Bytes to be sent (Size from 1 to 4 bytes according AlternateBytesSize)This parameter can be a value (32-bits) between 0x0 and 0xFFFFFFFF */uint32_t AddressSize; /* Specifies the Address SizeThis parameter can be a value of @ref QSPI_AddressSize */uint32_t AlternateBytesSize; /* Specifies the Alternate Bytes SizeThis parameter can be a value of @ref QSPI_AlternateBytesSize */uint32_t DummyCycles; /* Specifies the Number of Dummy Cycles.This parameter can be a number between 0 and 31 */uint32_t InstructionMode; /* Specifies the Instruction ModeThis parameter can be a value of @ref QSPI_InstructionMode */uint32_t AddressMode; /* Specifies the Address ModeThis parameter can be a value of @ref QSPI_AddressMode */uint32_t AlternateByteMode; /* Specifies the Alternate Bytes ModeThis parameter can be a value of @ref QSPI_AlternateBytesMode */uint32_t DataMode; /* Specifies the Data Mode (used for dummy cycles and data phases)This parameter can be a value of @ref QSPI_DataMode */uint32_t NbData; /* Specifies the number of data to transfer. (This is the number of bytes)This parameter can be any value between 0 and 0xFFFFFFFF (0 means undefined lengthuntil end of memory)*/uint32_t DdrMode; /* Specifies the double data rate mode for address, alternate byte and data phaseThis parameter can be a value of @ref QSPI_DdrMode */uint32_t DdrHoldHalfCycle; /* Specifies if the DDR hold is enabled. When enabled it delays the dataoutput by one half of system clock in DDR mode.This parameter can be a value of @ref QSPI_DdrHoldHalfCycle */uint32_t SIOOMode; /* Specifies the send instruction only once modeThis parameter can be a value of @ref QSPI_SIOOMode */
}QSPI_CommandTypeDef;/*** @brief QSPI Auto Polling mode configuration structure definition*/
typedef struct
{uint32_t Match; /* Specifies the value to be compared with the masked status register to get a match.This parameter can be any value between 0 and 0xFFFFFFFF */uint32_t Mask; /* Specifies the mask to be applied to the status bytes received.This parameter can be any value between 0 and 0xFFFFFFFF */uint32_t Interval; /* Specifies the number of clock cycles between two read during automatic polling phases.This parameter can be any value between 0 and 0xFFFF */uint32_t StatusBytesSize; /* Specifies the size of the status bytes received.This parameter can be any value between 1 and 4 */uint32_t MatchMode; /* Specifies the method used for determining a match.This parameter can be a value of @ref QSPI_MatchMode */uint32_t AutomaticStop; /* Specifies if automatic polling is stopped after a match.This parameter can be a value of @ref QSPI_AutomaticStop */
}QSPI_AutoPollingTypeDef;/*** @brief QSPI Memory Mapped mode configuration structure definition*/
typedef struct
{uint32_t TimeOutPeriod; /* Specifies the number of clock to wait when the FIFO is full before to release the chip select.This parameter can be any value between 0 and 0xFFFF */uint32_t TimeOutActivation; /* Specifies if the timeout counter is enabled to release the chip select.This parameter can be a value of @ref QSPI_TimeOutActivation */
}QSPI_MemoryMappedTypeDef;
相关文章:
【STM32 HAL库SPI/QSPI协议学习,基于外部Flash读取。】
1、SPI协议 简介 SPI 协议是由摩托罗拉公司提出的通讯协议 (Serial Peripheral Interface),即串行外围设备接口,是 一种高速全双工的通信总线。它被广泛地使用在 ADC、LCD 等设备与 MCU 间,要求通讯速率 较高的场合。 SPI 物理层 SPI 通讯…...

Nginx入门--初识Nginx的架构
一、概述 Nginx的架构设计旨在高效处理并发的网络请求。它采用了事件驱动的、非阻塞的IO模型,可以同时处理成千上万个并发连接,而不会消耗太多的系统资源。 二、主要组件 Nginx的主要组件包括: Master Process(主进程…...

网络性能提升10%,ZStack Edge 云原生超融合基于第四代英特尔®至强®可扩展处理器解决方案发布
随着业务模式的逐渐转变、业务架构逐渐变得复杂,同时容器技术的兴起和逐渐成熟,使得Kubernetes、微服务等新潮技术逐步应用于业务应用系统上。 为了充分释放性能、为业务系统提供更高效的运行环境,ZStack Edge 云原生超融合采用了第四代英特尔…...

双非计算机考研目标211,选11408还是22408更稳?
求稳得话,11408比22408要稳! 很多同学只知道,11408和22408在考察的科目上有区别,比如: 11408考的是考研数学一和英语一,22408考察的是考研数学二和英语二: 考研数学一和考研数学二的区别大吗…...
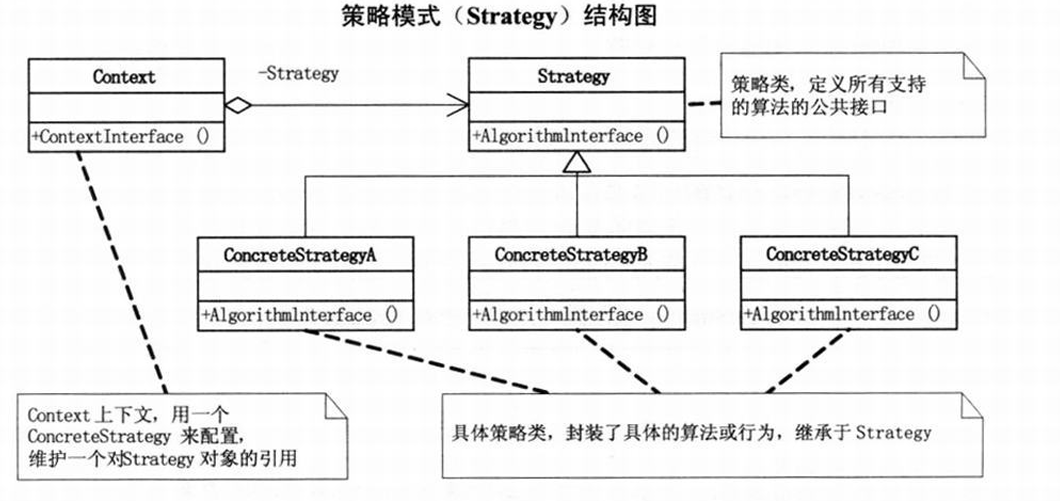
简单了解策略模式
什么是策略模式? 策略模式提供生成某一种产品的不同方式 Strategy策略类定义了某个各种算法的公共方法,不同的算法类通过继承Strategy策略类,实现自己的算法 Context的作用是减少客户端和Strategy策略类之间的耦合,客户端只需要…...

算法——运动模型
智能驾驶中常用的速度计算算法包括基于GPS的速度计算、惯性测量单元(IMU)的速度计算、雷达测距的速度计算、视觉测距的速度计算等。这些算法可以单独使用或者结合使用,以提高速度计算的准确性和稳定性。 智能驾驶中常用的加速度计算算法包括…...
基于R语言lavaan结构方程模型(SEM)技术应用
结构方程模型(Sructural Equation Modeling,SEM)是分析系统内变量间的相互关系的利器,可通过图形化方式清晰展示系统中多变量因果关系网,具有强大的数据分析功能和广泛的适用性,是近年来生态、进化、环境、…...

本地虚拟机服务器修改站点根目录并使用域名访问的简单示例
说明:本文提及效果是使用vmware虚拟机,镜像文件是Rocky8.6 一、配置文件路径 1. /etc/httpd/conf/httpd.conf #主配置文件 2. /etc/httpd/conf.d/*.conf #调用配置文件 调用配置文件的使用: vim /etc/httpd/conf.d/webpage.conf 因为在主配…...
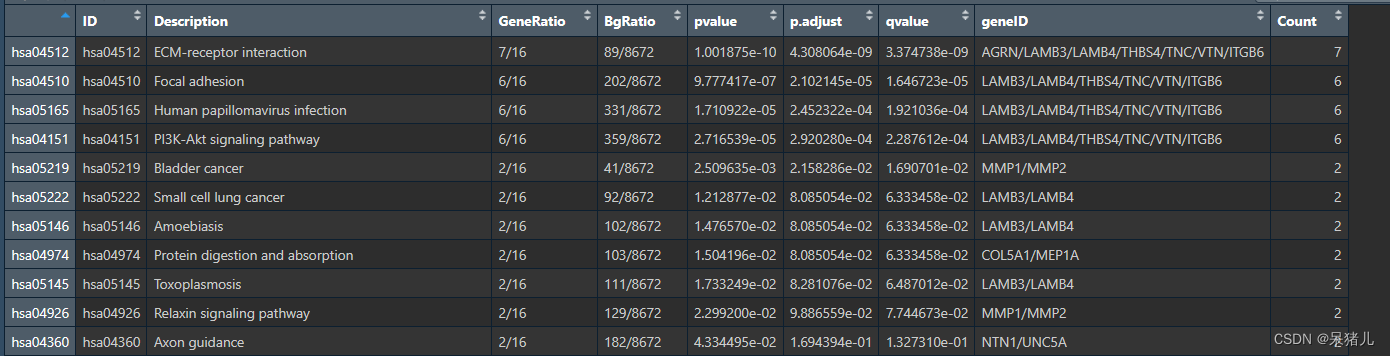
生信数据分析——GO+KEGG富集分析
生信数据分析——GOKEGG富集分析 目录 生信数据分析——GOKEGG富集分析1. 富集分析基础知识2. GO富集分析(Rstudio)3. KEGG富集分析(Rstudio) 1. 富集分析基础知识 1.1 为什么要做功能富集分析? 转录组学数据得到的基…...
微服务(基础篇-007-RabbitMQ)
目录 初识MQ(1) 同步通讯(1.1) 异步通讯(1.2) MQ常见框架(1.3) RabbitMQ快速入门(2) RabbitMQ概述和安装(2.1) 常见消息模型(2.2) 快速入门ÿ…...

汇总:五个开源的Three.js项目
Three.js 是一个基于 WebGL 的 JavaScript 库,它提供了一套易于使用的 API 用来在浏览器中创建和显示 3D 图形。通过抽象和简化 WebGL 的复杂性,Three.js 使开发者无需深入了解 WebGL 的详细技术就能够轻松构建和渲染3D场景、模型、动画、粒子系统等。 T…...

JavaScript(一)---【js的两种导入方式、全局作用域、函数作用域、块作用域】
一.JavaScript介绍 1.1什么是JavaScript JavaScript简称“js”,js与java没有任何关系。 js是一种“轻量级、解释型、面向对象的脚本语言”。 二.JavaScript的两种导入方式 2.1内联式 在HTML文档中使用<script>标签直接引用。 <script>console.log…...

部署云原生边缘计算平台kubeedge
文章目录 1、kubeedge架构2、基础服务提供 负载均衡器 metallb2.1、开启ipvc模式中的strictARP2.2、部署metalb2.2.1、创建IP地址池2.2.2、开启二层转发,实现在k8s集群节点外访问2.2.3、测试 3、部署cloudcore3.1、部署cloudcore3.2、修改cloudcore的网络类型 4、部…...

Java设计模式:单例模式详解
设计模式:单例详解 文章目录 设计模式:单例详解一、单例模式的原理二、单例模式的实现推荐1、饿汉模式2、静态内部类 三、单例模式的案例四、单例模式的使用场景推荐总结 一、单例模式的原理 单例模式听起来很高大上,但其实它的核心思想很简…...

Qt5.14.2 定时器黑魔法,一键唤醒延时任务
在图形界面程序的世界里,有这么一个需求无处不在:在特定的时间间隔后,执行一段特殊的代码。比如说30秒后自动保存文档、500毫秒后更新UI界面等等。作为资深Qt程序员,我相信各位一定也曾为实现这种"延时任务"而绞尽脑汁。今天&#…...

C++项目——集群聊天服务器项目(九)客户端异常退出业务
服务器端应检测到客户端是否异常退出,因此本节来实现客户端异常退出,项目流程见后文 一、客户端异常退出业务流程 (1)在业务模块定义处理客户端异常退出的函数 (2)集群聊天服务器项目(八)提到…...

STM32CubeIDE基础学习-HC05蓝牙模块和手机通信
STM32CubeIDE基础学习-HC05蓝牙模块和手机通信 文章目录 STM32CubeIDE基础学习-HC05蓝牙模块和手机通信前言第1章 硬件连接第2章 工程配置第3章 代码编写3.1 手机指令控制LED 第4章 实验现象总结 前言 前面的文章学习了串口通过轮询和中断的简单使用方法,现在就来用…...
npm mongoose包下载冲突解决之道
我在新电脑下载完项目代码后,运行 npm install --registryhttps://registry.npm.taobao.org 1运行就报错: npm ERR! code ERESOLVE npm ERR! ERESOLVE unable to resolve dependency tree npm ERR! npm ERR! While resolving: lowcode-form-backend1.0.0 npm …...
26. UE5 RPG同步面板属性(二)
在上一篇,我们解析了UI属性面板的实现步骤: 首先我们需要通过c去实现创建GameplayTag,这样可以在c和UE里同时获取到Tag创建一个DataAsset类,用于设置tag对应的属性和显示内容创建AttributeMenuWidgetController实现对应逻辑 并且…...

五、postman基础使用案例
postman基础使用 相关案例【传递查询参数】【提交表单数据】【提交JSON数据】 注:postman⼀款⽀持调试和测试的⼯具,开发、测试⼯程师都可以使⽤。方法一般统一为:方法→请求头→请求体→断言 相关案例 【传递查询参数】 访问TPshop搜索商品的…...

VS2022 + WinForms:从拖控件到写逻辑,手把手带你做出第一个C#计算器
VS2022 WinForms:从拖控件到写逻辑,手把手带你做出第一个C#计算器 第一次打开Visual Studio 2022时,那个闪亮的启动界面可能会让你既兴奋又不知所措。作为微软最新的集成开发环境,VS2022为C#开发者提供了强大的工具链࿰…...
)
从理论到面包板:手把手搭建Series-Shunt反馈放大器(含阻抗匹配避坑指南)
从理论到面包板:手把手搭建Series-Shunt反馈放大器(含阻抗匹配避坑指南) 在电子工程实践中,反馈放大器设计是模拟电路领域的核心技能之一。Series-Shunt结构因其出色的电压放大特性和相对简单的实现方式,成为初学者入门…...
)
手把手教你用Python+Folium搭建离线地图应用(附高德瓦片下载技巧)
PythonFolium离线地图开发实战:从瓦片下载到内网部署全指南 当你在偏远山区进行地质勘探时,突然发现手机信号全无,而团队急需查看预设路线上的地形数据;或者在企业内网环境中,安全策略禁止访问外部地图服务,…...

Stillcolor:彻底解决macOS时间抖动,为Apple Silicon用户带来无闪烁视觉体验
Stillcolor:彻底解决macOS时间抖动,为Apple Silicon用户带来无闪烁视觉体验 【免费下载链接】Stillcolor Disable temporal dithering on your Mac with this lightweight menu bar app. Designed for Apple silicon Macs. 项目地址: https://gitcode.…...

终极指南:如何在TouchGal一站式Galgame社区发现你的视觉小说宝藏
终极指南:如何在TouchGal一站式Galgame社区发现你的视觉小说宝藏 【免费下载链接】kun-touchgal-next TouchGAL是立足于分享快乐的一站式Galgame文化社区, 为Gal爱好者提供一片净土! 项目地址: https://gitcode.com/gh_mirrors/ku/kun-touchgal-next TouchGa…...

从快捷菜单到设置项:Android 11电池功能全移除实战指南
Android 11企业级设备电池功能深度定制指南 在工业平板、自助终端等专用设备场景中,系统界面的精简与定制往往比通用功能更重要。想象一下,一台用于仓库管理的工业平板,电池状态显示不仅毫无意义,还可能引发不必要的用户困惑——…...
Pixel Epic效果可视化:研报生成后自动进行事实核查与数据溯源标注演示
Pixel Epic效果可视化:研报生成后自动进行事实核查与数据溯源标注演示 1. 引言:当研报写作遇上像素冒险 在金融分析和行业研究领域,撰写高质量研究报告一直是个耗时费力的过程。传统方式下,分析师需要花费大量时间收集数据、验证…...
)
从SENet到KAN卷积:一文搞懂注意力机制如何从‘加权’进化到‘学习’(附演进路线图)
注意力机制的进化图谱:从SENet到KAN卷积的技术跃迁 在计算机视觉领域,注意力机制已成为提升模型性能的关键技术。本文将带您深入探索注意力机制从早期通道注意力到最新动态结构学习的完整演进历程,揭示这一技术如何从简单的特征重标定发展为能…...

磁盘 I/O 性能优化
磁盘 I/O 性能优化是一个从硬件、系统内核、文件系统、应用程序到I/O 模式的全链路优化过程,核心目标是减少磁盘访问次数、降低延迟、提升吞吐量与 IOPS。硬件层面 1. 存储介质升级HDD → SATA SSD → NVMe SSD:随机读写性能提升 10–100 倍,…...

宝可梦随机化终极指南:Universal Pokemon Randomizer ZX 完全使用教程
宝可梦随机化终极指南:Universal Pokemon Randomizer ZX 完全使用教程 【免费下载链接】universal-pokemon-randomizer-zx Public repository of source code for the Universal Pokemon Randomizer ZX 项目地址: https://gitcode.com/gh_mirrors/un/universal-po…...