工程(十一)——NUC11+D435i+VINS-FUSION+ESDF建图(github代码)
博主的合并代码
git@github.com:huashu996/VINS-FUSION-ESDFmap.git
一、D435i深度相机配置
1.1 SDK+ROS
参考我之前的博客,步骤和所遇见的问题已经写的很详细了
https://blog.csdn.net/HUASHUDEYANJING/article/details/129323834?spm=1001.2014.3001.5501
1.2 相机标定参数
1、相机内参
通过rostopic的camera/info获取
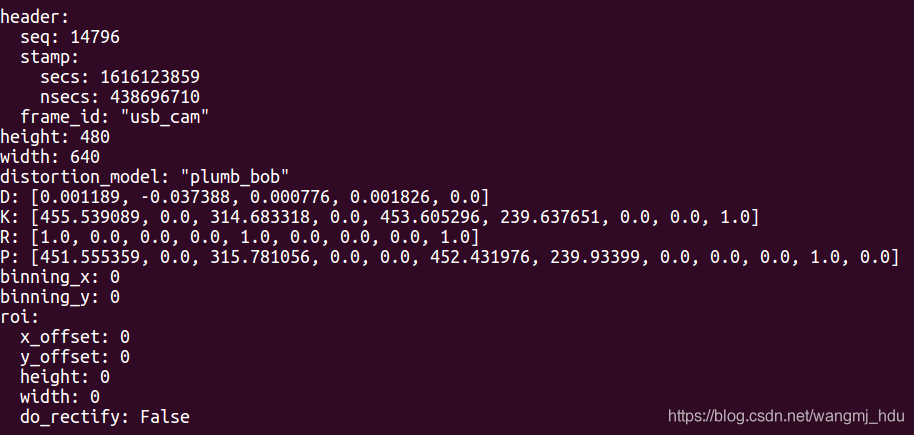
header:标准消息头
seq:序列ID,连续递增的ID号
stamp:两个时间戳
frame_id:与此数据相关联的帧ID
height:图像尺寸,height代表高度,(height*width)相机的分辨率,以像素为单位
width:图像尺寸,width代表宽度,(height*width)相机分辨率,以像素为单位
distortion_model:指定了相机畸变模型,对于大多数相机,"plumb_bob"简单的径向和切向畸变模型就足够了
D(distortion_parameters):畸变参数也叫失真系数,取决于畸变模型,(k1, k2, t1, t2, k3)
K:相机内参矩阵,使用焦距(fx, fy)和主点坐标(cx, cy),单位为像素,内参矩阵可以将相机坐标中的3D点投影到2D像素坐标,数据顺序(fx,cx,fy,cy,1)
R:旋转矩阵,将相机坐标系统对准理想的立体图像平面,使两张立体图像中的极线平行,仅对双目相机有效
P:投影矩阵,左边3*3矩阵是相机的内参矩阵,将相机坐标中的3D点投影到2D像素坐标,可能与相机内参K不同。对于单目相机Tx = Ty = 0。对于双目相机,Tx和Ty有所不同。
binning_x:图像下采样参数,水平方向
binning_y:图像下采样参数,竖直方向
(width / binning_x) x (height / binning_y)
下采样:binning_x = binning_y > 1。缩小图像,生成对应图像的缩略图,使得图像符合显示区域的大小。
roi:感兴趣区域定义,即完整图像上的一个矩形子窗口
2.相机外参标定
https://blog.csdn.net/qq_38364548/article/details/124917067
二、VINS-FUSION环境配置
2.1 重要环境配置如下
ubuntu18.04
ROS
pcl 1.7
opencv3
ceres-solver-1.14.0
整体环境配置还算简单要求不严格,间要说明以下。
ROS
sudo apt-get install ros-melodic-cv-bridge ros-melodic-tf ros-melodic-message-filters ros-melodic-image-transport ros-melodic-octomap*Ceres
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3 libgflags-dev libgoogle-glog-dev libeigen3-dev libgtest-dev
git clone https://github.com/ceres-solver/ceres-solver.git
cd ceres-solver/
mkdir build
cd build
cmake ..
make
sudo make install代码安装
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash三、实际测试运行
3.1 D435I launch修改
为了启动IMU,双目摄像头
<launch><arg name="serial_no" default=""/><arg name="usb_port_id" default=""/><arg name="device_type" default=""/><arg name="json_file_path" default=""/><arg name="camera" default="camera"/><arg name="tf_prefix" default="$(arg camera)"/><arg name="external_manager" default="false"/><arg name="manager" default="realsense2_camera_manager"/><arg name="fisheye_width" default="640"/><arg name="fisheye_height" default="480"/><arg name="enable_fisheye" default="false"/><arg name="depth_width" default="640"/><arg name="depth_height" default="480"/><arg name="enable_depth" default="true"/><arg name="infra_width" default="640"/><arg name="infra_height" default="480"/><arg name="enable_infra1" default="true"/><arg name="enable_infra2" default="true"/><arg name="color_width" default="640"/><arg name="color_height" default="480"/><arg name="enable_color" default="true"/><arg name="fisheye_fps" default="30"/><arg name="depth_fps" default="30"/><arg name="infra_fps" default="30"/><arg name="color_fps" default="30"/><arg name="gyro_fps" default="200"/><arg name="accel_fps" default="250"/><arg name="enable_gyro" default="true"/><arg name="enable_accel" default="true"/><arg name="enable_pointcloud" default="false"/><arg name="pointcloud_texture_stream" default="RS2_STREAM_COLOR"/><arg name="pointcloud_texture_index" default="0"/><arg name="enable_sync" default="true"/><arg name="align_depth" default="true"/><arg name="publish_tf" default="true"/><arg name="tf_publish_rate" default="0"/><arg name="filters" default=""/><arg name="clip_distance" default="-2"/><arg name="linear_accel_cov" default="0.01"/><arg name="initial_reset" default="false"/><arg name="unite_imu_method" default="linear_interpolation"/><arg name="topic_odom_in" default="odom_in"/><arg name="calib_odom_file" default=""/><arg name="publish_odom_tf" default="true"/><arg name="allow_no_texture_points" default="false"/><arg name="emitter_enable" default="false"/><!-- rosparam set /camera/stereo_module/emitter_enabled false -->
<rosparam>/camera/stereo_module/emitter_enabled: 0
</rosparam><rosparam if="$(arg emitter_enable)">/camera/stereo_module/emitter_enabled: 1
</rosparam><group ns="$(arg camera)"><include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml"><arg name="tf_prefix" value="$(arg tf_prefix)"/><arg name="external_manager" value="$(arg external_manager)"/><arg name="manager" value="$(arg manager)"/><arg name="serial_no" value="$(arg serial_no)"/><arg name="usb_port_id" value="$(arg usb_port_id)"/><arg name="device_type" value="$(arg device_type)"/><arg name="json_file_path" value="$(arg json_file_path)"/><arg name="enable_pointcloud" value="$(arg enable_pointcloud)"/><arg name="pointcloud_texture_stream" value="$(arg pointcloud_texture_stream)"/><arg name="pointcloud_texture_index" value="$(arg pointcloud_texture_index)"/><arg name="enable_sync" value="$(arg enable_sync)"/><arg name="align_depth" value="$(arg align_depth)"/><arg name="fisheye_width" value="$(arg fisheye_width)"/><arg name="fisheye_height" value="$(arg fisheye_height)"/><arg name="enable_fisheye" value="$(arg enable_fisheye)"/><arg name="depth_width" value="$(arg depth_width)"/><arg name="depth_height" value="$(arg depth_height)"/><arg name="enable_depth" value="$(arg enable_depth)"/><arg name="color_width" value="$(arg color_width)"/><arg name="color_height" value="$(arg color_height)"/><arg name="enable_color" value="$(arg enable_color)"/><arg name="infra_width" value="$(arg infra_width)"/><arg name="infra_height" value="$(arg infra_height)"/><arg name="enable_infra1" value="$(arg enable_infra1)"/><arg name="enable_infra2" value="$(arg enable_infra2)"/><arg name="fisheye_fps" value="$(arg fisheye_fps)"/><arg name="depth_fps" value="$(arg depth_fps)"/><arg name="infra_fps" value="$(arg infra_fps)"/><arg name="color_fps" value="$(arg color_fps)"/><arg name="gyro_fps" value="$(arg gyro_fps)"/><arg name="accel_fps" value="$(arg accel_fps)"/><arg name="enable_gyro" value="$(arg enable_gyro)"/><arg name="enable_accel" value="$(arg enable_accel)"/><arg name="publish_tf" value="$(arg publish_tf)"/><arg name="tf_publish_rate" value="$(arg tf_publish_rate)"/><arg name="filters" value="$(arg filters)"/><arg name="clip_distance" value="$(arg clip_distance)"/><arg name="linear_accel_cov" value="$(arg linear_accel_cov)"/><arg name="initial_reset" value="$(arg initial_reset)"/><arg name="unite_imu_method" value="$(arg unite_imu_method)"/><arg name="topic_odom_in" value="$(arg topic_odom_in)"/><arg name="calib_odom_file" value="$(arg calib_odom_file)"/><arg name="publish_odom_tf" value="$(arg publish_odom_tf)"/><arg name="allow_no_texture_points" value="$(arg allow_no_texture_points)"/></include></group>
</launch>3.2 单目+IMU
修改配置文件VINS-FUSION/src/VINS-Fusion-RGBD/config/realsense/realsense_d435i_config.yaml
主要修改相机的外参矩阵、内参矩阵、topic,不修改也能运行,漂移大。
roslaunch realsense2_camera rs_camera_vins.launch
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/realsense_d435i/realsense_d435i_config.yaml3.1 双目+IMU
修改配置文件VINS-FUSION/src/VINS-Fusion-RGBD/config/realsense/realsense_stereo_imu_config.yaml
主要修改两个相机的外参矩阵、内参矩阵、topic。
roslaunch realsense2_camera rs_camera_vins.launch
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/realsense_d435i/realsense_stereo_imu_config.yaml四、ESDF建图
4.1 下载代码编译
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/FIESTA
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash4.2 修改代码
1.修改launch
<launch><node pkg="fiesta" type="test_fiesta" name="fiesta" output="screen"required="true"><param name="resolution" value="0.05"/><param name="update_esdf_every_n_sec" value="0.1"/><!--Hash Table only--><param name="reserved_size" value="1000000"/><!--Array only--><param name="lx" value="-10.0"/><param name="ly" value="-10.0"/><param name="lz" value="-1"/><param name="rx" value="+10.0"/><param name="ry" value="+10.0"/><param name="rz" value="+3"/><!-- raycasting parameters --><param name="min_ray_length" value="0.5"/><param name="max_ray_length" value="5.0"/><!--If hash table is used, make sure the value is 0. In array implementation, 0 means no other thread.--><param name="ray_cast_num_thread" value="0"/><!-- needed when using depth image--><param name="center_x" value="381.91"/><param name="center_y" value="241.553"/><param name="focal_x" value="609.738"/><param name="focal_y" value="608.557"/><!-- probabilistic grid map --><param name="p_hit" value="0.70"/><param name="p_miss" value="0.35"/><param name="p_min" value="0.12"/><param name="p_max" value="0.97"/><param name="p_occ" value="0.80"/><!-- global / local --><param name="global_map" value="true"/><param name="global_update" value="true"/><param name="global_vis" value="true"/><param name="radius_x" value="3.0"/><param name="radius_y" value="3.0"/><param name="radius_z" value="1.5"/><!--depth_filter --><param name="use_depth_filter" value="true"/><param name="depth_filter_tolerance" value="0.1"/><param name="depth_filter_max_dist" value="10.0"/><param name="depth_filter_min_dist" value="0.1"/><!--unit: pixel--><param name="depth_filter_margin" value="0"/><!-- visulization --><!--0 for no visulize--><param name="visualize_every_n_updates" value="10"/><param name="slice_vis_max_dist" value="2.0"/><!-- relative to the lz if array is used, relative to the origin if hash table is used --><param name="slice_vis_level" value="1.6"/><param name="vis_lower_bound" value="0"/><param name="vis_upper_bound" value="+10"/><!-- subsribe source --><remap from="~depth" to="/camera/depth/image_rect_raw"/><remap from="~transform" to="/vins_estimator/camera_pose"/></node><node name="rvizvisualisation" pkg="rviz" type="rviz" output="log" args="-d $(find fiesta)/demo.rviz" />
</launch>2.修改主函数
FIESTA-master/src/FIESTA/test/test_fiesta.cpp,默认是点云输入格式。
#include "Fiesta.h"int main(int argc, char **argv) {ros::init(argc, argv, "FIESTA");ros::NodeHandle node("~");//fiesta::Fiesta<sensor_msgs::PointCloud2::ConstPtr, geometry_msgs::TransformStamped::ConstPtr> esdf_map(node);fiesta::Fiesta<sensor_msgs::Image::ConstPtr, nav_msgs::Odometry::ConstPtr> esdf_map(node);fiesta::Fiesta<sensor_msgs::Image::ConstPtr, nav_msgs::Odometry::ConstPtr> esdf_map(node);ros::spin();return 0;
}4.3 运行
roslaunch fiesta D435i.launch运行效果图
双目
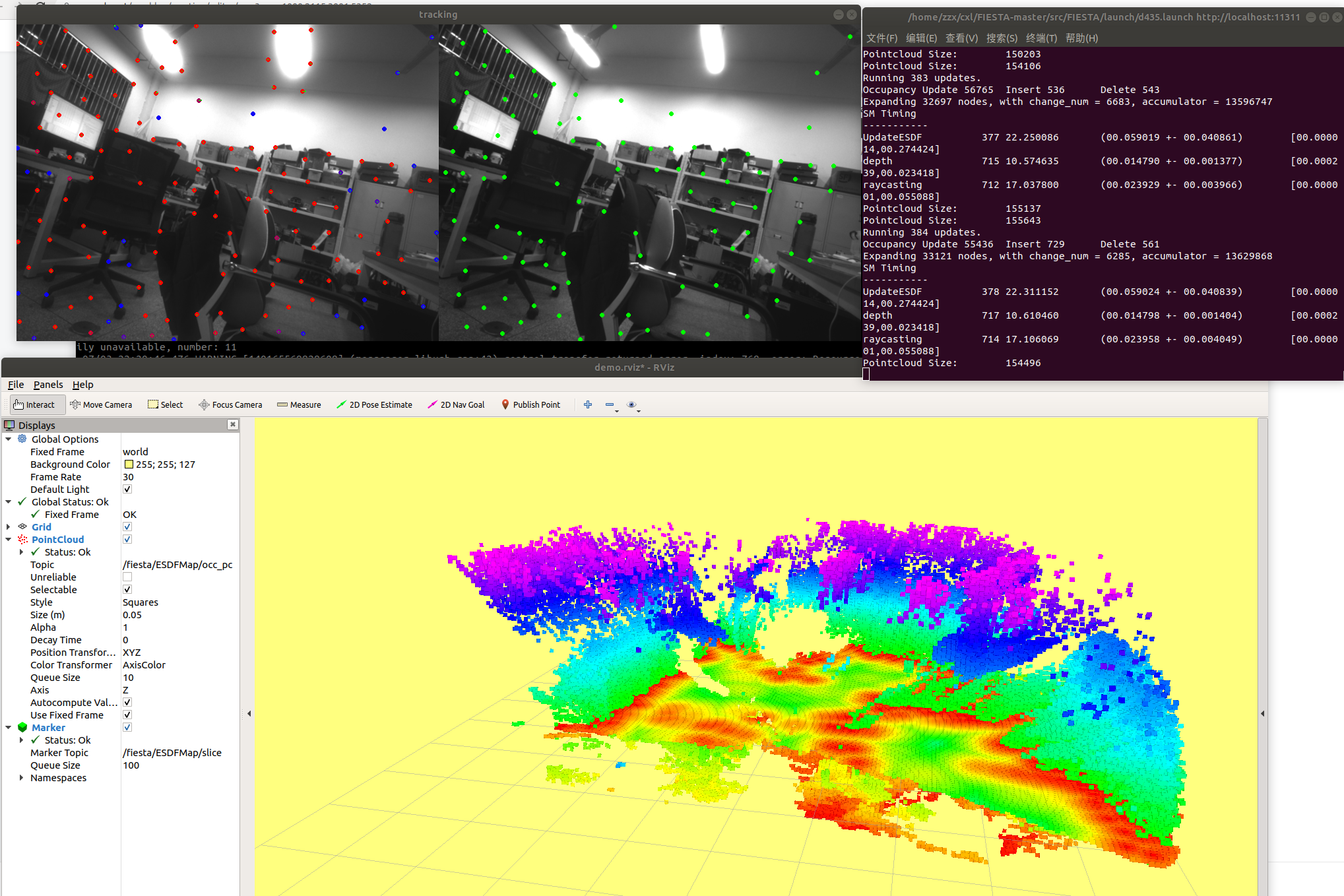
单目

相关文章:
工程(十一)——NUC11+D435i+VINS-FUSION+ESDF建图(github代码)
博主的合并代码gitgithub.com:huashu996/VINS-FUSION-ESDFmap.git一、D435i深度相机配置1.1 SDKROS参考我之前的博客,步骤和所遇见的问题已经写的很详细了https://blog.csdn.net/HUASHUDEYANJING/article/details/129323834?spm1001.2014.3001.55011.2 相机标定参数…...

第十四届蓝桥杯三月真题刷题训练——第 4 天
目录 题目 1 :九数算式_dfs回溯(全排列) 题目描述 运行限制 代码: 题目2:完全平方数 问题描述 输入格式 输出格式 样例输入 1 样例输出 1 样例输入 2 样例输出 2 评测用例规模与约定 运行限制 代码: 题目 1 &am…...

Hadoop 运行环境搭建(开发重点)
文章目录Hadoop 运行环境搭建(开发重点)一、安装JDK二、安装配置 Hadoop1、安装 hadoop2、hadoop 目录结构3、设置免密登录4、完全分布式模式(开发重点)1)分发jdk2)集群配置(1) 集群部署规划(2) 配置文件说…...

在社交媒体上行之有效的个人IP趋势
如果您认为无论是获得一份工作、建立一家企业还是推动个人职业发展,社交媒体都是帮助您实现目标的可靠工具,那么个人IP就是推动这一工具前进的燃料。个人IP反映了您是谁,您在所处领域的专业程度,以及您与他人的区别。社交媒体将有…...

Java网络编程
网络编程 什么是网络编程? 可以让设备中的程序与网络上其他设备中的程序进行数据交互(实现网络通信) Java.net. 包下提供了网络编程的解决方案* 基本的通信架构 基本的通信架构有两种方式:CS架构(Client客户端/Se…...
)
PTA:L1-001 Hello World、L1-002 打印沙漏、L1-003 个位数统计(C++)
目录 L1-001 Hello World 问题描述: 实现代码: L1-002 打印沙漏 问题描述: 实现代码: 原理思路: L1-003 个位数统计 题目描述: 实现代码: 原理思路: 过于简单的就不再写题…...

构造HTTP请求
使用formform使用如下:<body><!-- 表单标签,允许用户和服务器之间交互数据 --><form action"https://www.sogou.com" method"get"><!-- 要求提交的数据以键值对的结构来组织 --><input type"text" name"stduent…...
转速/线速度/角速度计算FC
工业应用中很多设备控制离不开转速、线速度的计算,这篇博客给大家汇总整理。张力控制的开环闭环方法中也离不开转速和线速度的计算,详细内容请参看下面的文章链接: PLC张力控制(开环闭环算法分析)_plc的收卷张力控制系统_RXXW_Dor的博客-CSDN博客里工业控制张力控制无处不…...

学习笔记:Java并发编程(补)ThreadLocal
【尚硅谷】学习视频:https://www.bilibili.com/video/BV1ar4y1x727【黑马程序员】学习视频:https://www.bilibili.com/video/BV15b4y117RJ 参考书籍 《实战 JAVA 高并发程序设计》 葛一鸣 著《深入理解 JAVA 虚拟机 | JVM 高级特性与最佳实践》 周志明 著…...

HashMap底层实现原理及面试题
文章目录1. 常见的数据结构有三种结构1.1 各自数据结构的特点2. HashMap2.1 概述2.2 底层结构2.2.1 HashMa实现原理:2.2.1.1 map.put(k,v)实现原理2.2.1.2 map.get(k)实现原理2.2.1.3 resize源码2.2.2 HashMap常用的变量2.2.3 HashMap构造函数2.3 JDK1.8之前存在的问…...
:DMA+ADC实现模拟量检测)
【STM32】进阶(二):DMA+ADC实现模拟量检测
1、简述 DMA:Direct Memory Access,直接内存访问 ADC:Analog to Digital Converter,模数转换器,模拟信号转换成数字信号的电路(采样-量化-编码) 参考博客: STM32DMA功能详解 STM32…...
Lab2_Simple Shell_2020
Lab2: 实验目的:给xv6添加新的系统调用 并理解系统调用是如何工作的,并理解xv6内核的一些内部特征 实验准备: 阅读xv6的第2章以及第4章的4.3,4.3小节熟悉下面的源码 用户态相关的代码:user/user.h和user/usys.pl内核态相关的代…...
2023最全电商API接口 高并发请求 实时数据 支持定制 电商数据 买家卖家数据
电商日常运营很容易理解,就是店铺商品维护,上下架,评价维护,库存数量,协助美工完成制作详情页。店铺DSR,好评率,提升客服服务等等,这些基础而且每天都必须做循环做的工作。借助电商A…...

MySQL 的索引类型
1. 按照功能划分 按照功能来划分,索引主要有四种: 普通索引唯一性索引主键索引全文索引 普通索引就是最最基础的索引,这种索引没有任何的约束作用,它存在的主要意义就是提高查询效率。 普通索引创建方式如下: CREATE…...

< Linux > 进程信号
目录 1、信号入门 生活角度的信号 技术应用角度的信号 前台进程 && 后台进程 信号概念 用kill -l命令察看系统定义的信号列表 信号处理的方式 2、信号产生前 用户层产生信号的方式 3、产生信号 3.1、通过终端按键产生信号 3.2、核心转储core dump 3.3、调用系统函数…...

Pyspark基础入门7_RDD的内核调度
Pyspark 注:大家觉得博客好的话,别忘了点赞收藏呀,本人每周都会更新关于人工智能和大数据相关的内容,内容多为原创,Python Java Scala SQL 代码,CV NLP 推荐系统等,Spark Flink Kafka Hbase Hi…...

C/C++每日一练(20230307)
目录 1. 国名排序 ★★ 2. 重复的DNA序列 ★★★ 3. 买卖股票的最佳时机 III ★★★ 🌟 每日一练刷题专栏 C/C 每日一练 专栏 Python 每日一练 专栏 1. 国名排序 小李在准备明天的广交会,明天有来自世界各国的客房跟他们谈生意,…...

一条SQL查询语句是如何执行的?
平时我们使用数据库,看到的通常都是一个整体。比如,你有个最简单的表,表里只有一个ID字段,在执行下面这个查询语句时: mysql> select * from T where ID10; 我们看到的只是输入一条语句,返…...
tcsh常用配置
查看当前的shell类型 在 Linux 的世界中,有着许多 shell 程序。常见的有: Bourne shell (sh) C shell (csh) TC shell (tcsh) Korn shell (ksh) Bourne Again shell (bash) 其中,最常用的就是bash和tcsh,本次文章介绍tcsh的…...
YOLOv5源码逐行超详细注释与解读(2)——推理部分detect.py
前言 前面简单介绍了YOLOv5的项目目录结构(直通车:YOLOv5源码逐行超详细注释与解读(1)——项目目录结构解析),对项目整体有了大致了解。 今天要学习的是detect.py。通常这个文件是用来预测一张图片或者一…...

企业级AI应用如何通过Taotoken统一管理多个大模型API调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业级AI应用如何通过Taotoken统一管理多个大模型API调用 在构建企业级AI应用时,技术团队常常面临一个现实挑战&#x…...

詹姆斯·韦伯望远镜:344个单点故障背后的航天工程极限挑战
1. 韦伯望远镜的“生死十日”:一场价值百亿美元的太空芭蕾作为一名在航天与深空探测领域摸爬滚打了十几年的工程师,我经历过无数次地面测试的紧张,也见证过发射倒计时的屏息瞬间。但像詹姆斯韦伯空间望远镜(JWST)这样&…...

Windows 10终极PL2303驱动修复指南:让老旧串口设备重获新生
Windows 10终极PL2303驱动修复指南:让老旧串口设备重获新生 【免费下载链接】pl2303-win10 Windows 10 driver for end-of-life PL-2303 chipsets. 项目地址: https://gitcode.com/gh_mirrors/pl/pl2303-win10 还在为Windows 10系统下的PL2303串口设备无法正…...

ncmdumpGUI终极使用教程:轻松解密网易云音乐NCM文件
ncmdumpGUI终极使用教程:轻松解密网易云音乐NCM文件 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 还在为网易云音乐下载的NCM格式文件无法在普通…...
)
别再想当然!用AD628/INA等差分放大器做单端采集,必须搞懂的共模电压计算(附Excel工具)
差分放大器单端采集实战指南:共模电压计算与设计避坑 在工业传感器接口和医疗设备信号链设计中,差分放大器常被用于单端信号采集的场景。许多工程师习惯性地认为,只要将差分放大器的负输入端接地,就能轻松实现单端转差分功能。但实…...

大模型“开源”迷思:小白与程序员必看,收藏这份避坑指南!
大模型“开源”并非简单代码开放,涉及权重、数据、训练方法等多维度。文章详解不同协议(如MIT、Apache-2.0、GPL、AGPL等)对企业商业化的影响,强调理解协议边界至关重要。从开放权重到真正开源,企业需关注协议对商用、…...

Unity游戏马赛克移除终极指南:如何轻松解锁隐藏内容?
Unity游戏马赛克移除终极指南:如何轻松解锁隐藏内容? 【免费下载链接】UniversalUnityDemosaics A collection of universal demosaic BepInEx plugins for games made in Unity3D engine 项目地址: https://gitcode.com/gh_mirrors/un/UniversalUnity…...

AI信息摘要系统:从RSS抓取到LLM摘要的自动化实现
1. 项目概述:AI驱动的每日信息摘要最近在GitHub上看到一个挺有意思的项目,叫“ai-daily-digest”。光看名字,你大概能猜到它想做什么:用人工智能来帮你整理每日信息。但具体怎么实现,能解决什么问题,背后又…...
)
保姆级教程:用正点原子MFG_TOOL给I.MX6U开发板烧录出厂系统(附常见问题排查)
嵌入式Linux开发板系统烧录全流程指南:从零开始到成功启动 第一次拿到嵌入式开发板时的兴奋感,往往会被复杂的系统烧录过程冲淡不少。特别是对于刚接触嵌入式Linux的开发者来说,如何把系统镜像正确烧录到开发板上,常常成为第一个需…...

别再用眼睛猜阈值了!Halcon threshold函数实战:5分钟搞定车牌字符分割
工业视觉实战:Halcon阈值分割在车牌识别中的精准应用 在机器视觉领域,车牌识别系统是典型的工业应用场景之一。而字符分割作为识别流程中的关键环节,直接影响最终识别准确率。许多初学者往往陷入一个误区——仅凭肉眼观察随意设置阈值参数&am…...