使用新版FLIR (FLIR_ADAS_v2) 数据集创建yolo格式数据集(目标检测)
FLIR在2022.1.19发布了新版的FLIR_ADAS_v2,有着更多的类别和数量更丰富的图像。数据集同步注释热图像和无注释RGB图像供参考。本文章主要介绍如何使用FLIR_ADAS_v2中的rgb图像和thermal图像来制作yolo格式数据集。
1.官方数据集下载:FLIR_ADAS_v2数据集下载
- 官方下载链接
2. 将单个json文件转换为多个xml文件
需要注意的是代码里面的文件位置是当时把官方文件下载的 COCO 数据集所在目录,读取的json 文件所在位置是看需要用的是rgb图像或者thermal图像的train或者val。
另外生成的xml文件存放位置一定要和json文件相对应,也就是说新建的文件夹里一定包含data文件夹,只这样才能生成xml文件,不然会报错"filenotfounderror: [errno 2] no such file or directory: '..."。即保存文件里面的data文件夹一定要新建好,再运行代码。

python代码如下:
# translate coco_json to xml
import os
import time
import json
import pandas as pd
from tqdm import tqdm
from pycocotools.coco import COCOdef trans_id(category_id):names = []namesid = []for i in range(0, len(cats)):names.append(cats[i]['name'])namesid.append(cats[i]['id'])# print('id:{1}\t {0}'.format(names[i], namesid[i]))index = namesid.index(category_id)return indexroot = r'G:/红外数据集-FLIR2/FLIR_ADAS_v2/images_thermal_train' # 你下载的 COCO 数据集所在目录
dataType = '2017'
anno = r'G:/红外数据集-FLIR2/FLIR_ADAS_v2/images_thermal_train/coco.json' # annotation json 文件所在位置
xml_dir = r'G:/红外数据集-FLIR2/FLIR2_yolo_xml/images_thermal_train' # 导出的xml文件所在的位置coco = COCO(anno) # 读文件
cats = coco.loadCats(coco.getCatIds()) # 这里loadCats就是coco提供的接口,获取类别# Create anno dir
dttm = time.strftime("%Y%m%d%H%M%S", time.localtime())
# if os.path.exists(xml_dir):
# os.rename(xml_dir, xml_dir + dttm)
# os.mkdir(xml_dir)with open(anno, 'r') as load_f:f = json.load(load_f)imgs = f['images'] # json文件的img_id和图片对应关系 imgs列表表示多少张图cat = f['categories']
df_cate = pd.DataFrame(f['categories']) # json中的类别
df_cate_sort = df_cate.sort_values(["id"], ascending=True) # 按照类别id排序
categories = list(df_cate_sort['name']) # 获取所有类别名称
print('categories = ', categories)
df_anno = pd.DataFrame(f['annotations']) # json中的annotationfor i in tqdm(range(len(imgs))): # 大循环是images所有图片xml_content = []file_name = imgs[i]['file_name'] # 通过img_id找到图片的信息height = imgs[i]['height']img_id = imgs[i]['id']width = imgs[i]['width']# xml文件添加属性xml_content.append("<annotation>")xml_content.append(" <folder>VOC2007</folder>")xml_content.append(" <filename>" + file_name.split('/')[1].split('.')[0] + '.jpg' + "</filename>")xml_content.append(" <size>")xml_content.append(" <width>" + str(width) + "</width>")xml_content.append(" <height>" + str(height) + "</height>")xml_content.append(" </size>")xml_content.append(" <segmented>0</segmented>")# 通过img_id找到annotationsannos = df_anno[df_anno["image_id"].isin([img_id])] # (2,8)表示一张图有两个框for index, row in annos.iterrows(): # 一张图的所有annotation信息bbox = row["bbox"]category_id = row["category_id"]# cate_name = categories[trans_id(category_id)]cate_name = cat[category_id - 1]['name']# add new objectxml_content.append("<object>")xml_content.append("<name>" + cate_name + "</name>")xml_content.append("<pose>Unspecified</pose>")xml_content.append("<truncated>0</truncated>")xml_content.append("<difficult>0</difficult>")xml_content.append("<bndbox>")xml_content.append("<xmin>" + str(int(bbox[0])) + "</xmin>")xml_content.append("<ymin>" + str(int(bbox[1])) + "</ymin>")xml_content.append("<xmax>" + str(int(bbox[0] + bbox[2])) + "</xmax>")xml_content.append("<ymax>" + str(int(bbox[1] + bbox[3])) + "</ymax>")xml_content.append("</bndbox>")xml_content.append("</object>")xml_content.append("</annotation>")x = xml_contentxml_content = [x[i] for i in range(0, len(x)) if x[i] != "\n"]### list存入文件xml_path = os.path.join(xml_dir, file_name.replace('.jpg', '.xml'))with open(xml_path, 'w+', encoding="utf8") as f:f.write('\n'.join(xml_content))xml_content[:] = []成功运行!
3. 将多个xml文件转换为YOLO所需的txt文件
里面的类别看Readme文件,其中thermal类别比rgb类别多了dog和deer,生成txt注意区分
不过为了后续类别对应,我统一都写成thermal的类别了
# xml_to_yolo_txt.py
# 此代码和VOC_KITTI文件夹同目录
import os
import xml.etree.ElementTree as ET
# 这里的类名为我们xml里面的类名,顺序a按照Readme文件,或者也可以不考虑顺序
# 其中thermal类别比rgb类别多了dog和deer,生成txt注意区分
class_names = ['person','bike','car','motor', 'bus', 'train','truck','light','hydrant', 'sign','dog','deer','skateboard','stroller', 'scooter', 'other vehicle']
# class_names = ['person','bike','car','motor', 'bus', 'train','truck','light','hydrant', 'sign',
# 'skateboard','stroller','scooter','other vehicle' ]
# xml文件路径
path = 'G:/红外数据集-FLIR2/FLIR2_yolo_xml/images_rgb_train/data/'
# 转换一个xml文件为txt
def single_xml_to_txt(xml_file):tree = ET.parse(os.path.join(path, xml_file))root = tree.getroot()# 保存的txt文件路径txt_file = os.path.join('G:/红外数据集-FLIR2/FLIR2_yolo/images_rgb_train/data/', xml_file.split('.')[0]+'.txt')with open(txt_file, 'w') as txt_file:for member in root.findall('object'):#filename = root.find('filename').textpicture_width = int(root.find('size')[0].text)picture_height = int(root.find('size')[1].text)class_name = member[0].text# 类名对应的indexclass_num = class_names.index(class_name)box_x_min = int(member[4][0].text) # 左上角横坐标box_y_min = int(member[4][1].text) # 左上角纵坐标box_x_max = int(member[4][2].text) # 右下角横坐标box_y_max = int(member[4][3].text) # 右下角纵坐标# 转成相对位置和宽高x_center = float(box_x_min + box_x_max) / (2 * picture_width)y_center = float(box_y_min + box_y_max) / (2 * picture_height)width = float(box_x_max - box_x_min) / picture_widthheight = float(box_y_max - box_y_min) / picture_height# print(class_num, x_center, y_center, width, height)txt_file.write(str(class_num) + ' ' + str(x_center) + ' ' + str(y_center) + ' ' + str(width) + ' ' + str(height) + '\n')
# 转换文件夹下的所有xml文件为txt
def dir_xml_to_txt(path):files = os.listdir(path)for xml_file in files:single_xml_to_txt(xml_file)
dir_xml_to_txt(path)
4,整理成yolo的txt格式
一般yolo的格式如下:
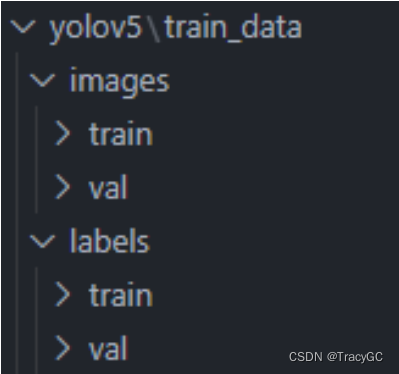
因此将上面生成的文件分别整理成图片的格式,然后仿照./data/文件夹下的yaml文件,自己写一个数据yaml:此时的class类别必须和上面生成txt的类别顺序一致。
train: G:/yolo_FLIR2/FLIR2_yolo_thermal/images/train
val: G:/yolo_FLIR2/FLIR2_yolo_thermal/images/val
test: G:/yolo_FLIR2/FLIR2_yolo_thermal/images/test# Classes
names:0: person1: bike 2: car3: motor4: bus5: train6: truck7: light8: hydrant9: sign10: dog11: deer12: skateboard13: stroller 14: scooter 15: other vehicle相关文章:
使用新版FLIR (FLIR_ADAS_v2) 数据集创建yolo格式数据集(目标检测)
FLIR在2022.1.19发布了新版的FLIR_ADAS_v2,有着更多的类别和数量更丰富的图像。数据集同步注释热图像和无注释RGB图像供参考。本文章主要介绍如何使用FLIR_ADAS_v2中的rgb图像和thermal图像来制作yolo格式数据集。 1.官方数据集下载:FLIR_ADAS_v2数据集…...

PHP发票查验接口未返回正确信息的原因、发票ocr识别接口
发票查验接口未返回正确信息的原因一般有以下几种,第一种可能是接口没有调通,第二种是本身这张发票就是一张错票、假票,第三种可能是税局系统或者网络问题等等。那么,遇到这种情况应该如何解决呢?翔云发票查验接口&…...
RA4000CE为汽车动力传动系统提供解决方案
目前汽车电气化的水平越来越高,其中比较显著的一个发展方向就是将发动机管理系统和自动变速器控制系统,集成为动力传动系统的综合控制(PCM)。作为汽车动力的核心部件,通过电子系统的运用,将外部多个传感器和执行环节的数据进行统一…...
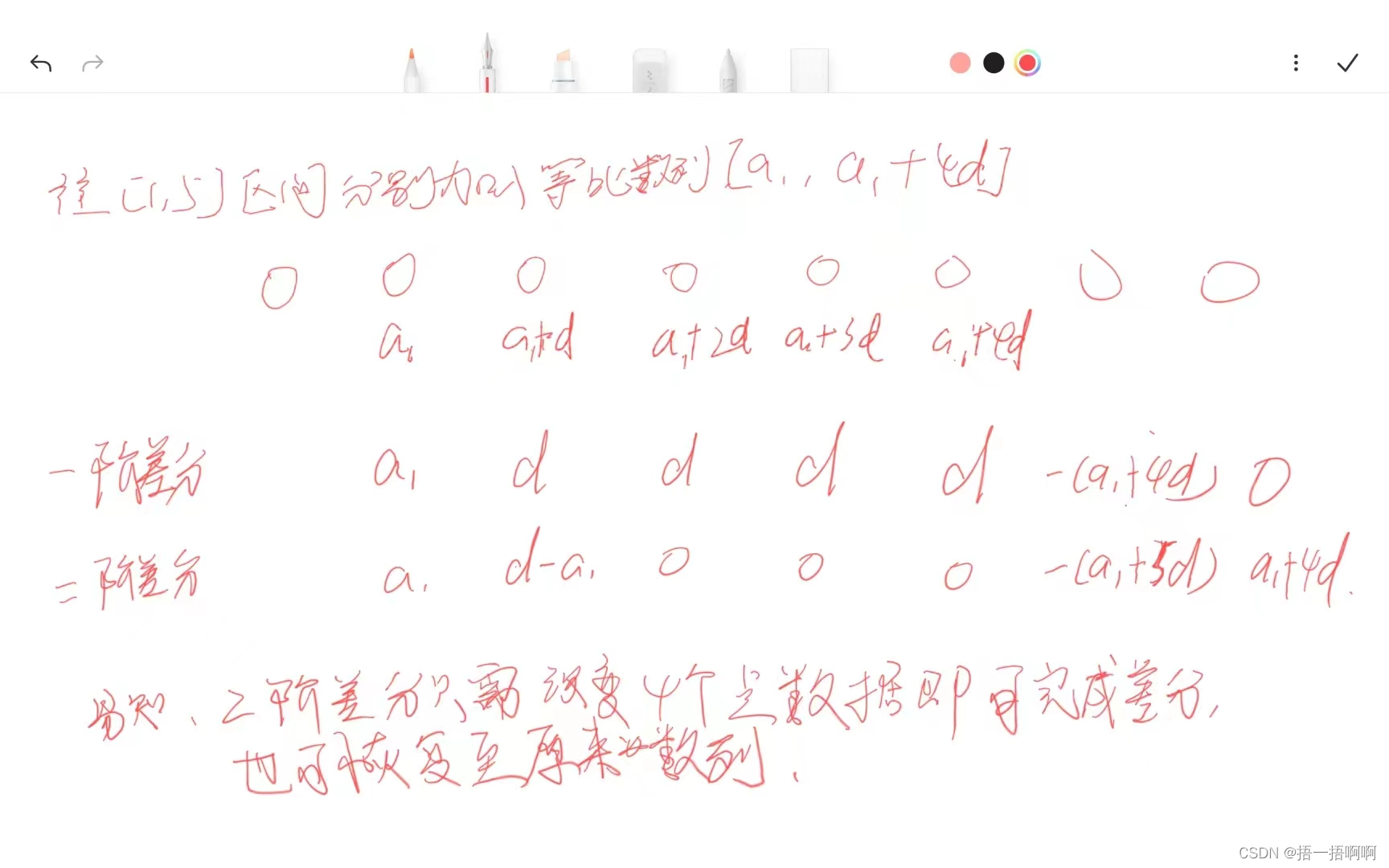
算法中的二阶差分
众所周知,在往区间的每一个数都加上一个相同的数k,进行n次后会得到一个新的数列,如果每次加都循环区间挨个数加上k,这样时间复杂度无疑是O(n^2),很高。这时可以采用一阶差分就可解决,这里默认会一阶差分&am…...

第十五届蓝桥杯Java A组参赛总结
一、比赛 4月13号那天上午9点到下午1点,线上比赛总共4小时。 因为很久没有参加过竞赛了,所以还是很紧张,睡觉都有点睡不好,生怕出什么差错 我参加的是java的A组,两道填空(每道5分)和六道大题…...

springCloudAlibaba集成seata实战(分布式事物详解)
一、分布式事务 1. 事务介绍 1.1 基础概念 事务:保证我们多个数据库操作的原子性,多个操作要么都成功要么都不成功 事务ACID原则 A(Atomic)原子性:构成事务的所有操作,要么都执行完成,要么全部…...

VRTK/SteamVR手柄震动功能
VRTK/SteamVR手柄震动功能 前言代码块 前言 手柄震动功能配合虚拟仿真模块的模拟电击等功能非常方便 代码块 SteamVR_Controller.DeviceRelation.Rightmost是右侧手柄 SteamVR_Controller.DeviceRelation.Leftmost是左侧手柄 var deviceIndex2 SteamVR_Controller.GetDevic…...

MYSQL索引优化方法
👏作者简介:大家好,我是小周同志,25届双非校招生Java选手,很高兴认识大家 📕学习出处:本文是学自小林coding (xiaolincoding.com) 网站的MYSQL图解篇 🔥如果感觉博主的文章还不错的…...
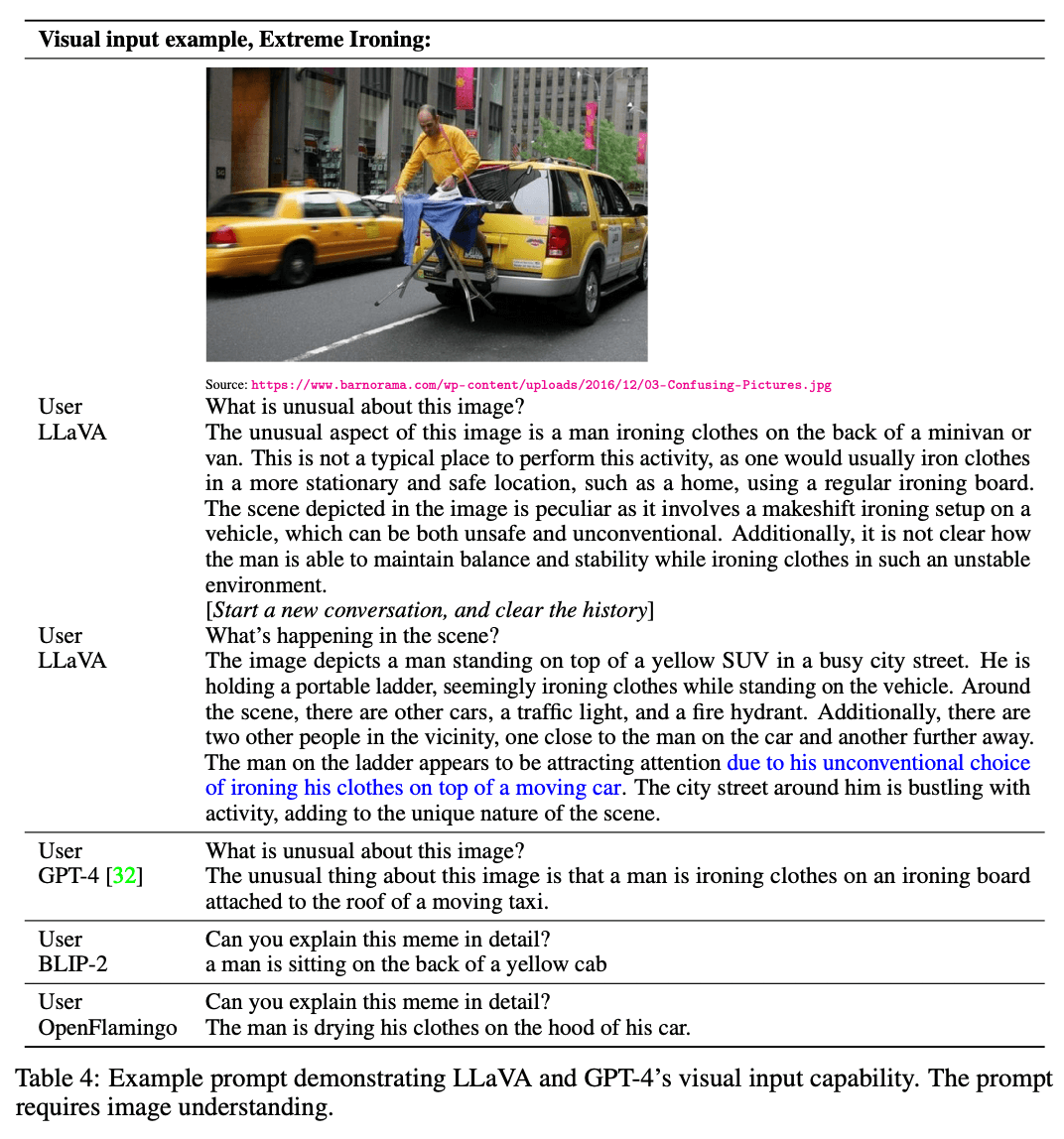
多模态 ——LLaVA 集成先进图像理解与自然语言交互GPT-4的大模型
概述 提出了一种大型模型 LLaVA,它使用 GPT-4 生成多模态语言图像指令跟随数据,并利用该数据将视觉和语言理解融为一体。初步实验表明,LLaVA 展示了出色的多模态聊天能力,在合成多模态指令上的表现优于 GPT-4。 在科学质量保证中…...
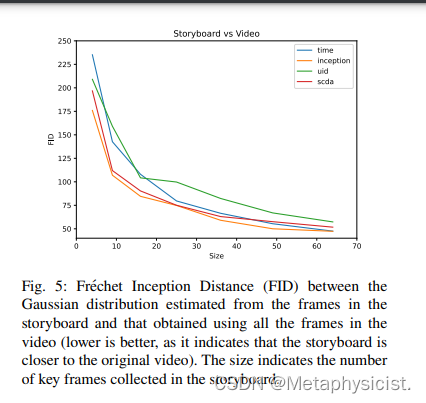
文献学习-33-一个用于生成手术视频摘要的python库
VideoSum: A Python Library for Surgical Video Summarization Authors: Luis C. Garcia-Peraza-Herrera, Sebastien Ourselin, and Tom Vercauteren Source: https://arxiv.org/pdf/2303.10173.pdf 这篇文章主要关注的是如何通过视频摘要来简化和可视化手术视频,…...

Unity Android 2021 Release-Notes
🌈Unity Android 2021 Release-Notes 版本更新内容2021.3.34Android: Google play.core package is replaced with separate plugins including play.asset-delivery 2.1.0 to solve PAD related compatibility problem with Android 14.(UUM-54157)2021.3.34Androi…...

Java8新特性--lambda表达式
lambda表达式本质上是一个匿名函数,在lambda表达式中我们只需要关心参数列表以及方法体。优点是可以减少代码量。 1.语法 基本语法:(参数)->表达式 或 (参数) -> {语句;} 2.函数式接口 要了解lambda表达式,首先要了解什么是函数式接口…...

C/C++中设置随机数
前言 我们通常在写一个数据结构后,需要去测试其正确性和性能比较,那在平常手动输入数据的方式太鸡肋,并且不具有普遍性和随机性。基于这个原因,我们必须要掌握设置随机数,不但可以给我们提供更多的数据,还可…...

ARM 三个小灯闪烁
.text .global _start _start: 使能GPIOE的外设时钟 LDR R0,0x50000A28 指定基地址 LDR R1,[R0] 读取r0中的数据保存到r1中 ORR R1,R1,#(0X3<<4) [4]设置为1,表示 STR R1,[R0] 将修改之后的值放回去 设置PE10,PE8为输出 LDR R0,0X50006000…...

创业之路:从市场洞察到产品实现的全方位指南
创业是一项挑战性的旅程,需要综合考虑市场、产品、技术、团队等多个方面。在这篇文章中,我们将深入探讨如何更好地进行创业,从市场分析到产品实现的各个环节。 深入市场洞察 在创业之前,深入了解目标市场是至关重要的。我们需要…...
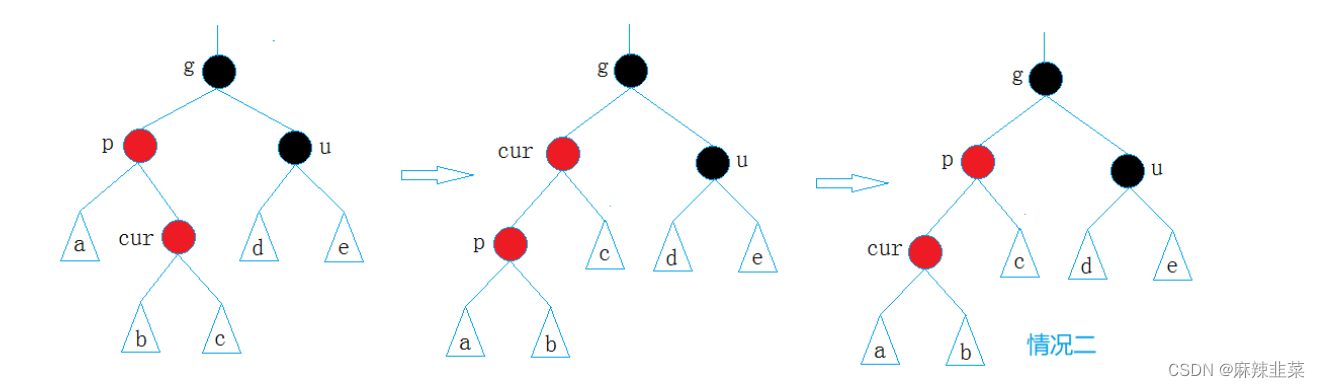
C++ 红黑树模拟实现
💓博主CSDN主页:麻辣韭菜💓 ⏩专栏分类:C知识分享⏪ 🚚代码仓库:C高阶🚚 🌹关注我🫵带你学习更多C知识 🔝🔝 前言 前面我们实现了AVL树,发明AVL树…...
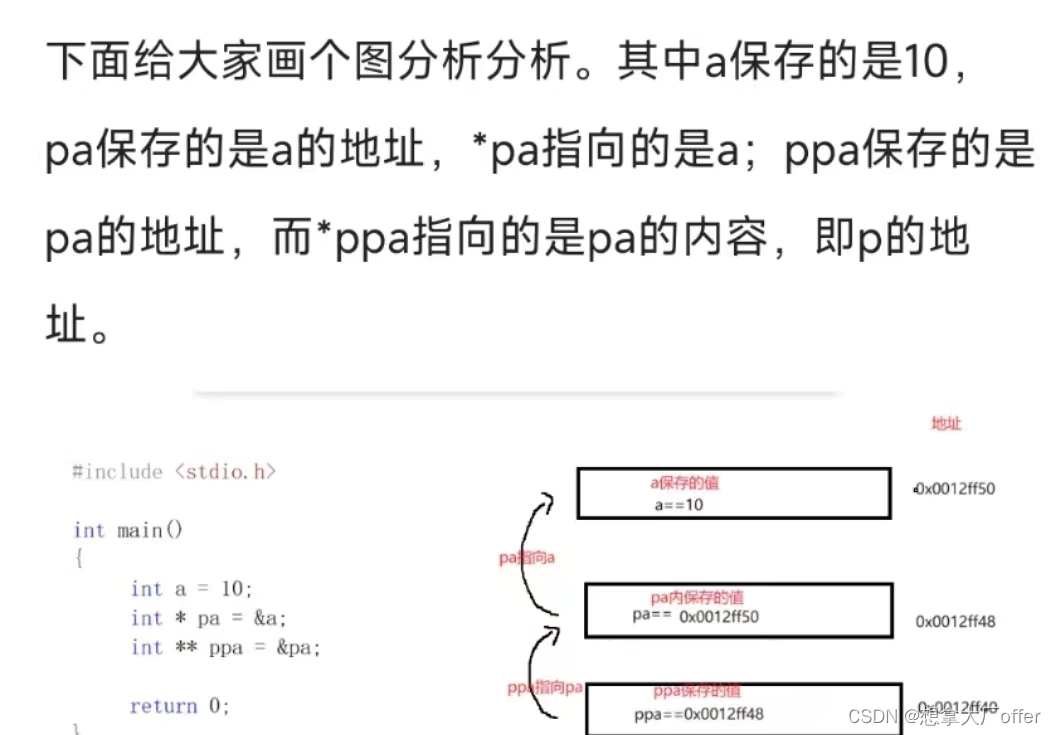
【数据结构】第三节:单链表
前言 本篇要求掌握的C语言基础知识:指针、结构体 目录 前言 单链表 概念 对比链表和顺序表 创建链表 实现单链表 准备工作 打印链表 创建节点并初始化 尾插 二级指针的调用 尾插代码 头插 尾删 头删 查找(返回节点) 在指定位…...

Python中操作Excel表对象并打包为脚本
一、准备工作 pip install pandas pip install openpyxl pip install pyinstaller 数据表格: 数据表下载 二、执行写入操作 import pandas as pd # pyinstaller --onefile attendance_records_score.py # 打包 # 读取源Excel文件(假设源表有列A…...
Python学习笔记23 - 目录操作
os模块操作目录相关函数 os.path模块操作目录相关函数 案例1 —— 列出指定目录下的所有.py文件 案例2 —— walk()...
今天你学langchain了吗?
langchain的重重难关 学习langchain也有一段时间了,从最初的0.0339版本到现在的稳定版本,langchain走了很长的路.在学习的路上也遇到了很多的困难. api_key难关 学习langchain最大的困难就是openai的API_KEY,国内无法申请到官方账号,申请到了也无法进行充值.好在有几美元的免…...

Bluekit AI钓鱼工具包深度解析:40+品牌DOM级复刻+98%2FA绕过率的工业化攻击革命
摘要 2026年4月底,安全厂商Varonis曝光了一款名为Bluekit的AI驱动全链路工业化钓鱼工具包,它标志着网络钓鱼攻击正式进入"零门槛、高成功率、大规模量产"的AI工业化时代。本文将从技术原理、攻击流程、反检测机制三个维度深度解析Bluekit的核…...

如何高效清理游戏平台残留文件:SteamCleaner一站式解决方案指南
如何高效清理游戏平台残留文件:SteamCleaner一站式解决方案指南 【免费下载链接】SteamCleaner :us: A PC utility for restoring disk space from various game clients like Origin, Steam, Uplay, Battle.net, GoG and Nexon :us: 项目地址: https://gitcode.c…...

HYMiniMall项目配置详解:从开发环境到生产环境的完整部署
HYMiniMall项目配置详解:从开发环境到生产环境的完整部署 【免费下载链接】HYMiniMall 小程序商场项目 项目地址: https://gitcode.com/gh_mirrors/hy/HYMiniMall HYMiniMall是一个功能完善的小程序商场项目,本文将详细介绍如何从开发环境到生产环…...

绝巧弃利之后,ABAP 才回到可升级的常道
老子说「绝圣弃智,民利百倍;绝仁弃义,民复孝慈;绝巧弃利,盗贼无有」。这句话放到 SAP ABAP 开发里,不能理解成不要知识、不要规范、不要技巧。ABAP 项目从来离不开知识,也离不开严密的工程纪律。它真正提醒我们的是,当一个系统过度崇拜个人聪明、过度依赖补救式道德、过…...

2026廊坊硅酸铝柔性包裹,防火专业厂家这样选
最近在跑几个建筑机电工程,跟不少项目经理、施工队负责人聊了聊,发现大家不约而同遇到了同一个坎儿——管道防火验收。尤其是湿式报警阀间、排烟管道这些“硬骨头”,防火包裹的材质、阻燃等级、贴合度,直接决定了消防验收能不能一…...

kagent:把 Agent 当 Pod 来管,赌的是 Agent 的最终归宿是 K8s
我们写过用 kubectl apply -f deployment.yaml 起一个 Pod,写过用 Service 把它暴露出来,写过用 Operator 监听 CRD 自动调和状态。Solo.io 那群人 2025 年初做了一个看起来很自然、但没人提早做出来的事:把同一套思路平移到 AI Agent 上——…...

Axure RP实战:从页面跳转到动态交互的五大核心功能详解
1. 页面跳转:让原型"活"起来的起点 第一次用Axure RP做原型时,我最惊讶的不是它华丽的界面,而是点击一个按钮居然能跳转到另一个页面——这简直像变魔术。后来才发现,页面跳转是所有交互设计的基础,就像搭积…...

手把手教你搞定产品EMC静电放电测试:从PCB布局到TVS选型的完整避坑指南
手把手教你搞定产品EMC静电放电测试:从PCB布局到TVS选型的完整避坑指南 静电放电(ESD)是电子设备最常见的电磁兼容问题之一。去年某智能家居厂商因ESD测试失败导致产品召回,直接损失超过2000万。这并非孤例——行业数据显示&…...

第四部分-Docker网络与存储——18. 自定义网络
18. 自定义网络 1. 自定义网络概述 自定义网络允许用户根据需求创建具有特定配置的网络,相比默认的 bridge 网络,提供了更好的隔离性、DNS 解析和灵活性。 ┌────────────────────────────────────────────…...

2025最权威的AI学术平台实测分析
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 智能写作辅助工具DeepSeek,能在论文创作的全程给予支持。进入选题阶段࿰…...