【信号与系统 - 9】傅里叶变换的性质习题
1 习题
已知 f ( t ) f(t) f(t) 的傅里叶变换为 F ( j w ) F(jw) F(jw) ,求如下信号的傅里叶变换
-
(1) t ⋅ f ( 3 t ) t\cdot f(3t) t⋅f(3t)
解:
f ( 3 t ) ↔ 1 3 F ( j w 3 ) f(3t)\leftrightarrow \frac{1}{3}F(j\frac{w}{3}) f(3t)↔31F(j3w)
t ⋅ f ( 3 t ) ↔ j 1 3 ⋅ d d w [ F ( j w 3 ) ] t\cdot f(3t)\leftrightarrow j\frac{1}{3}\cdot\frac{d}{dw}[F(j\frac{w}{3})] t⋅f(3t)↔j31⋅dwd[F(j3w)]
其中: d ( w 3 ) = 1 3 d w d(\frac{w}{3})=\frac{1}{3}dw d(3w)=31dw,则 d w = 3 d ( w 3 ) dw=3d(\frac{w}{3}) dw=3d(3w),所以 d d w [ F ( j w 3 ) ] = 1 3 d d ( w 3 ) [ F ( j w 3 ) ] \frac{d}{dw}[F(j\frac{w}{3})]=\frac{1}{3}\frac{d}{d(\frac{w}{3})}[F(j\frac{w}{3})] dwd[F(j3w)]=31d(3w)d[F(j3w)],则 t ⋅ f ( 3 t ) ↔ j 1 9 ⋅ F ′ ( j w 3 ) t\cdot f(3t)\leftrightarrow j\frac{1}{9}\cdot F'(j\frac{w}{3}) t⋅f(3t)↔j91⋅F′(j3w) -
(2) ( t − 1 ) d [ f ( t ) ] d t (t-1)\frac{d[f(t)]}{dt} (t−1)dtd[f(t)]
解:
d [ f ( t ) ] d t ↔ j w F ( j w ) \frac{d[f(t)]}{dt}\leftrightarrow jwF(jw) dtd[f(t)]↔jwF(jw)
t ⋅ d [ f ( t ) ] d t ↔ j d d w [ j w F ( j w ) ] = − d d w [ w F ( j w ) ] = − [ F ( j w ) + w F ′ ( j w ) ] t\cdot\frac{d[f(t)]}{dt}\leftrightarrow j\frac{d}{dw}[jwF(jw)]=-\frac{d}{dw}[wF(jw)]=-[F(jw)+wF'(jw)] t⋅dtd[f(t)]↔jdwd[jwF(jw)]=−dwd[wF(jw)]=−[F(jw)+wF′(jw)]
( t − 1 ) ⋅ d [ f ( t ) ] d t ↔ j d d w [ j w F ( j w ) ] = − d d w [ w F ( j w ) ] = − [ F ( j w ) + w F ′ ( j w ) ] − j F ′ ( j w ) = − [ F ( j w ) + ( w + 1 ) F ′ ( j w ) ] (t-1)\cdot\frac{d[f(t)]}{dt}\leftrightarrow j\frac{d}{dw}[jwF(jw)]=-\frac{d}{dw}[wF(jw)]=-[F(jw)+wF'(jw)]-jF'(jw)=-[F(jw)+(w+1)F'(jw)] (t−1)⋅dtd[f(t)]↔jdwd[jwF(jw)]=−dwd[wF(jw)]=−[F(jw)+wF′(jw)]−jF′(jw)=−[F(jw)+(w+1)F′(jw)]
- (3) ( 2 − t ) f ( 2 − t ) (2-t)f(2-t) (2−t)f(2−t)
解:
f ( 2 − t ) = f [ − ( t − 2 ) ] ↔ F ( − j w ) e − j 2 w f(2-t)=f[-(t-2)]\leftrightarrow F(-jw)e^{-j2w} f(2−t)=f[−(t−2)]↔F(−jw)e−j2w
t ⋅ f ( 2 − t ) ↔ j d d w [ F ( − j w ) e − j 2 w = − j d d ( − w ) [ F ( − j w ) e − j 2 w ] = − j [ F ′ ( − j w ) e − j 2 w − j 2 F ( − j w ) e − j 2 w ] t\cdot f(2-t)\leftrightarrow j\frac{d}{dw}[F(-jw)e^{-j2w}=-j\frac{d}{d(-w)}[F(-jw)e^{-j2w}]=-j\Big[F'(-jw)e^{-j2w}-j2F(-jw)e^{-j2w}\Big] t⋅f(2−t)↔jdwd[F(−jw)e−j2w=−jd(−w)d[F(−jw)e−j2w]=−j[F′(−jw)e−j2w−j2F(−jw)e−j2w]
( 2 − t ) ⋅ f ( 2 − t ) ↔ 2 F ( − j w ) e − j 2 w + [ j F ′ ( − j w ) e − j 2 w − 2 F ( − j w ) e − j 2 w ] = j F ′ ( − j w ) e − j 2 w (2-t)\cdot f(2-t)\leftrightarrow 2F(-jw)e^{-j2w}+[jF'(-jw)e^{-j2w}-2F(-jw)e^{-j2w}]=jF'(-jw)e^{-j2w} (2−t)⋅f(2−t)↔2F(−jw)e−j2w+[jF′(−jw)e−j2w−2F(−jw)e−j2w]=jF′(−jw)e−j2w
2 补充:二倍角以及积化和差公式
{ c o s α ⋅ c o s β = 1 2 [ c o s ( α + β ) + c o s ( α − β ) ] 【调制】 s i n α ⋅ s i n β = 1 2 [ c o s ( α + β ) − c o s ( α − β ) ] c o s α ⋅ s i n β = 1 2 [ s i n ( α + β ) − s i n ( α − β ) ] s i n α ⋅ c o s β = 1 2 [ s i n ( α + β ) + s i n ( α − β ) ] \begin{cases} cos\alpha \cdot cos\beta=\frac{1}{2}[cos(\alpha+\beta)+cos(\alpha-\beta)]【调制】\\ sin\alpha \cdot sin\beta=\frac{1}{2}[cos(\alpha+\beta)-cos(\alpha-\beta)]\\ cos\alpha \cdot sin\beta=\frac{1}{2}[sin(\alpha+\beta)-sin(\alpha-\beta)]\\ sin\alpha \cdot cos\beta=\frac{1}{2}[sin(\alpha+\beta)+sin(\alpha-\beta)]\\ \end{cases} ⎩ ⎨ ⎧cosα⋅cosβ=21[cos(α+β)+cos(α−β)]【调制】sinα⋅sinβ=21[cos(α+β)−cos(α−β)]cosα⋅sinβ=21[sin(α+β)−sin(α−β)]sinα⋅cosβ=21[sin(α+β)+sin(α−β)]
s i n ( 2 α ) = 2 s i n α ⋅ c o s α sin(2\alpha)=2sin\alpha\cdot cos\alpha sin(2α)=2sinα⋅cosα
{ c o s ( 2 α ) = 2 c o s 2 α − 1 = 1 − 2 s i n 2 α = c o s 2 α − s i n 2 α c o s 2 α = c o s ( 2 α ) + 1 2 s i n 2 α = 1 − c o s ( 2 α ) 2 \begin{cases} cos(2\alpha)=2cos^2\alpha-1=1-2sin^2\alpha=cos^2\alpha-sin^2\alpha\\ cos^2\alpha=\frac{cos(2\alpha)+1}{2}\\ sin^2\alpha=\frac{1-cos(2\alpha)}{2}\\ \end{cases} ⎩ ⎨ ⎧cos(2α)=2cos2α−1=1−2sin2α=cos2α−sin2αcos2α=2cos(2α)+1sin2α=21−cos(2α)
t a n ( 2 α ) = 2 t a n α 1 − t a n 2 α tan(2\alpha)=\frac{2tan\alpha}{1-tan^2\alpha} tan(2α)=1−tan2α2tanα
相关文章:

【信号与系统 - 9】傅里叶变换的性质习题
1 习题 已知 f ( t ) f(t) f(t) 的傅里叶变换为 F ( j w ) F(jw) F(jw) ,求如下信号的傅里叶变换 (1) t ⋅ f ( 3 t ) t\cdot f(3t) t⋅f(3t) 解: f ( 3 t ) ↔ 1 3 F ( j w 3 ) f(3t)\leftrightarrow \frac{1}{3}F(j\frac{w}…...
:语法糖概念解析)
C#探索之路基础夯实篇(5):语法糖概念解析
C#探索之路基础夯实篇(5):语法糖概念解析 文章目录 C#探索之路基础夯实篇(5):语法糖概念解析1、概念定义2、Lua中的语法糖3、C#中的语法糖4、C中的语法糖5、优缺点辨析6、适用范围7、总结 从之前一开始接触lua的时候开始,开始第一次接触到语法…...
SeaTunnel 与 DataX 、Sqoop、Flume、Flink CDC 对比
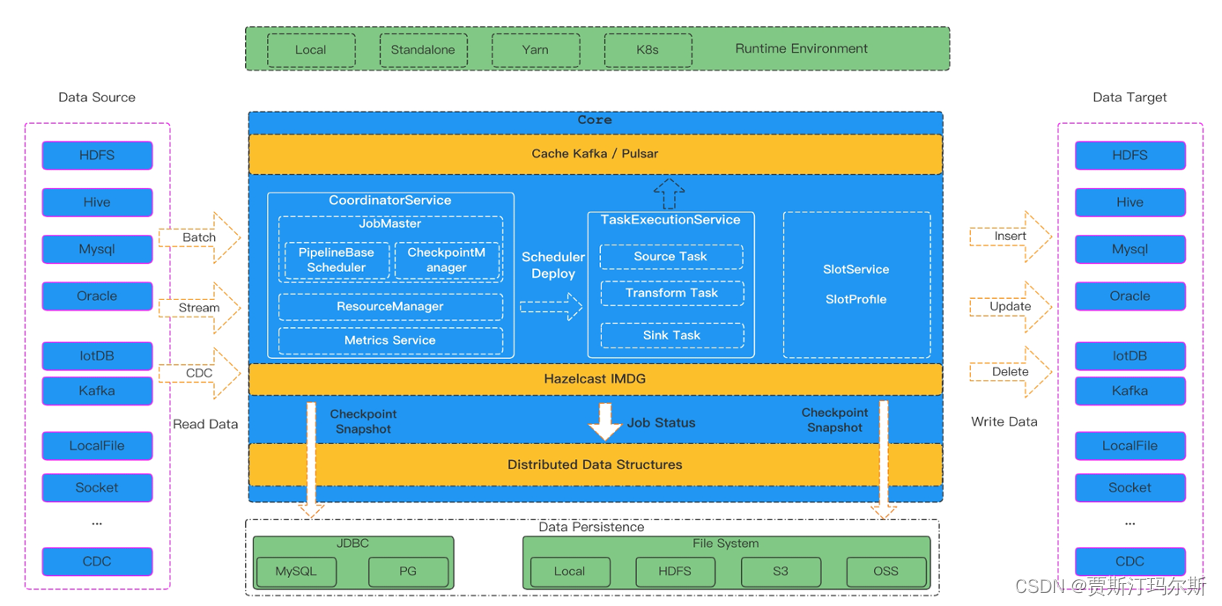
产品概述 Apache SeaTunnel 是一个非常易用的超高性能分布式数据集成产品,支持海量数据的离线及实时同步。每天可稳定高效同步万亿级数据,已应用于数百家企业生产,也是首个由国人主导贡献到 Apache 基金会的数据集成顶级项目。 SeaTunnel 主要解决数据集成领域的常见问题:…...

深入理解汇编:平栈、CALL和RET指令详解
视频学习下载地址:https://pan.quark.cn/s/04e6946a803a 汇编语言以其接近硬件的特性和高效的执行速度,在系统编程、性能优化和逆向工程中占有不可或缺的地位。本文将深入探讨汇编语言中的平栈操作以及CALL和RET指令&#…...

DP4 最小花费爬楼梯
原题链接:最小花费爬楼梯_牛客题霸_牛客网 目录 1. 题目描述 2. 思路分析 3. 代码实现 1. 题目描述 2. 思路分析 dp。 开一个dp数组和a数组。dp[i]表示在当前这一格所需要的费用,a数组其实就是题目中的cost数组。 因为最后要求到顶楼的最低费用&a…...

OpenXR API概览与核心组件解析
在虚拟现实(VR)和增强现实(AR)领域,OpenXR API提供了一个重要的开放标准,使得开发者能够跨多种硬件和软件平台创建兼容的应用。本文将详细解释OpenXR中的核心组件和数据结构,并探讨它们如何共同…...
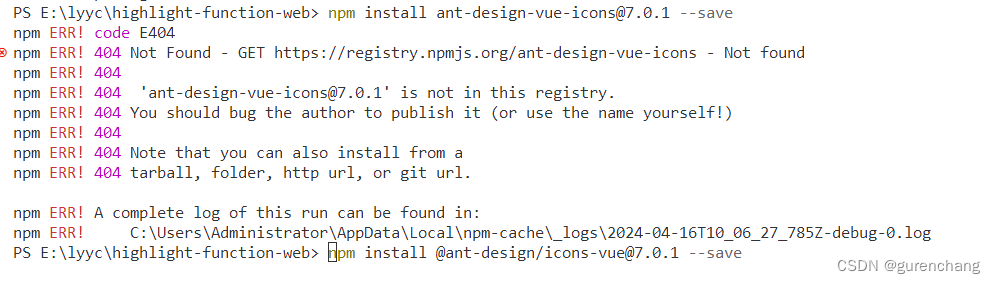
安装指定版本的ant-design-vue和指定版本的@ant-design/icons-vue 图标组件包
前言: 最近在完成公司的项目时,为了兼容其他的版本,需要安装指定版本的ant-design-vue和ant-design/icons-vue 图标组件包,安装成功之后,分享如下: 安装命令: ant-design-vue: 不…...

Zynq7000系列中的休眠模式
休眠模式是在系统层面定义的,它包括将APU置于待机模式,并将多个控制器保持在无时钟的复位状态。 进入休眠模式可以大大降低功耗。在休眠模式下,大多数功能时钟组都会被关闭或断电。唯一需要保持活动的设备是一个CPU、窥探控制单元(…...

在redhat7/8平台上部署ELK7.17.18的技术方案
部署环境说明 为节省资源直接使用1台测试机模拟3节点elasticsearch服务集群做部署,在该主机上同时部署了3个elasticsearch实例、1个logstash实例、1个kibana实例、1个filebeat实例。对于生产环境,以上实例服务应该做分布式部署。 ELK-TEST1 192.168.10…...
分享6个好用的ChatGPT)
(Chat For Al,创新Al,汇语Al助手,AiTab新标签,万能助手,LLaVA)分享6个好用的ChatGPT
目录 1、Chat For AI 2、创想AI 3、汇语AL助手...

MySQL-锁篇
文章目录 表级锁和行级锁了解吗?有什么区别?行级锁使用有什么注意事项?InnoDB有哪几类行锁?共享锁和排他锁是什么?意向锁有什么用? 锁是一种常见的并发事务的控制方式 表级锁和行级锁了解吗?有什…...

滤波器笔记(杂乱)
线性相位是时间平移,相位不失真 零、基础知识 1、用相量表示正弦量 https://zhuanlan.zhihu.com/p/345546880 https://www.zhihu.com/question/347763932/answer/1103938667 A s i n ( ω t θ ) ⇔ A e j θ ⇔ A ∠ θ Asin(\omega t\theta) {\Leftrightarrow…...
【ARFoundation自学01】搭建AR框架,检测平面点击位置克隆物体
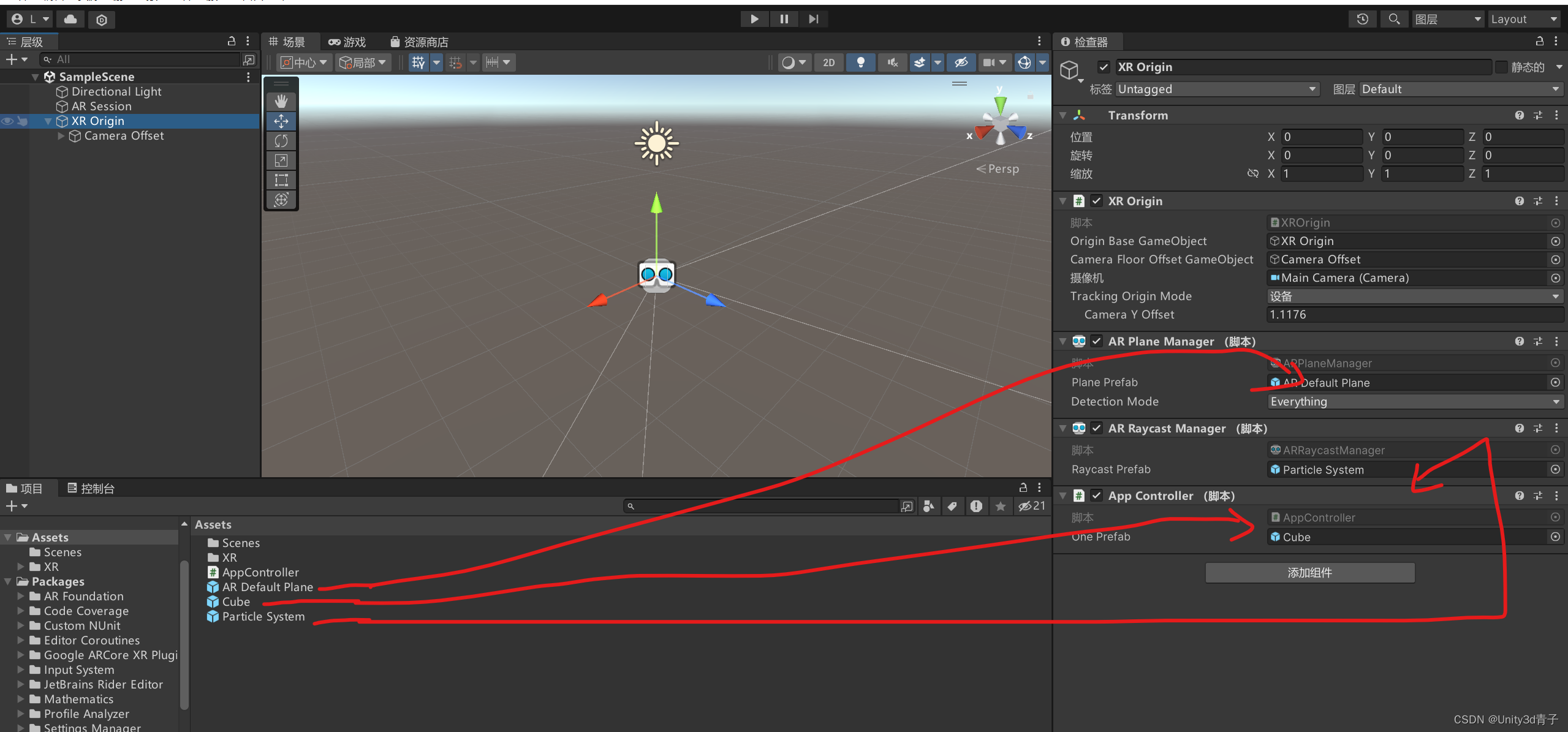
Unity开发ARFoundation相关应用首先安装ARFoundation包 然后设置XR 1.基础AR场景框架搭建 2.一个基本的点击克隆物体到识别的平面脚本 挂在XROrigin上 脚本AppController 脚本说明书 ## 业务逻辑 AppController 脚本旨在实现一个基本的 AR 应用程序功能:用户通过…...

.Net ajax 接收参数
后端部分代码 一般处理程序 public void ProcessRequest(HttpContext context){context.Response.ContentType "text/plain";string str_index context.Request.Form.AllKeys.Contains("index") ? context.Request.Form["index"].ToString(…...

智能零售:引领购物新时代
智能零售通过整合人工智能、物联网、大数据和机器学习等技术,正在彻底改变传统的购物模式,为消费者和零售商提供前所未有的效率和个性化体验。 智能零售利用消费者数据分析来提供个性化的购物推荐。无论是在线平台或是实体店内,智能系统都能…...

【AIGC】AIGC在虚拟数字人中的应用:塑造未来互动体验的革新力量
🚀 🚀 🚀随着科技的快速发展,AIGC已经成为引领未来的重要力量。其中,AIGC在虚拟数字人领域的应用更是引起了广泛关注。虚拟数字人作为一种先进的数字化表达形式,结合了3D建模、动画技术、人工智能等多种先进…...
电机控制器电路板布局布线参考指导(五)
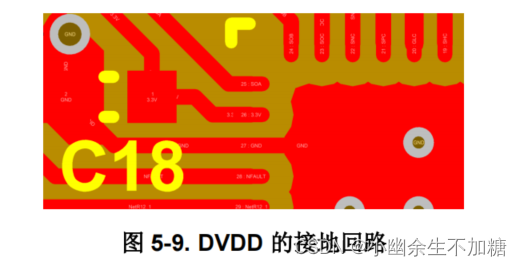
电机控制器电路板布局布线参考指导(五)大容量电容和旁路电容的放置 1.大容量电容的放置2.电荷泵电容器3.旁路电容/去耦电容的放置3.1 靠近电源3.2 靠近功率器件3.3 靠近开关电流源3.4 靠近电流感测放大器3.5 靠近稳压器 tips:资料主要来自网络…...

Python医院挂号脚本
作者介绍:10年大厂数据\经营分析经验,现任大厂数据部门负责人。 会一些的技术:数据分析、算法、SQL、大数据相关、python 欢迎加入社区:码上找工作 作者专栏每日更新: LeetCode解锁1000题: 打怪升级之旅 python数据分析…...

LabVIEW光学探测器板级检测系统
LabVIEW光学探测器板级检测系统 特种车辆乘员舱的灭火抑爆系统广泛采用光学探测技术来探测火情。光学探测器作为系统的关键部件,其探测灵敏度、响应速度和准确性直接关系到整个系统的运行效率和安全性。然而,光学探测器在长期使用过程中可能会因为灰尘污…...
女上司问我:误删除PG百万条数据,可以闪回吗?
作者:IT邦德 中国DBA联盟(ACDU)成员,10余年DBA工作经验 擅长主流数据Oracle、MySQL、PG、openGauss运维 备份恢复,安装迁移,性能优化、故障应急处理等可提供技术业务: 1.DB故障处理/疑难杂症远程支援 2.Mysql/PG/Oracl…...

Next.js 页面和路由
Next.js 页面与路由学习笔记 Next.js 13 的 App Router 基于文件系统路由,通过文件夹和文件的命名约定自动生成路由,无需手动配置路由表。 1. 基本路由规则 1.1 核心约定 文件作用是否必须page.tsx定义路由的 UI(页面内容)是&a…...

代码审查进入“零延迟”时代:如何在CI/CD流水线毫秒级触发语义级风险推演?——2026奇点大会核心议题深度拆解
更多请点击: https://intelliparadigm.com 第一章:AI原生代码审查:2026奇点智能技术大会Code Review新范式 在2026奇点智能技术大会上,AI原生代码审查(AI-Native Code Review)正式取代传统人工规则引擎混合…...

数据流编排工具 diflowy:从核心概念到实战部署全解析
1. 项目概述:当“绿色”遇上“数据流编排” 最近在开源社区里,一个名为 green-dalii/diflowy 的项目引起了我的注意。乍一看这个名字, green-dalii 像是一个开发者或组织的标识,而 diflowy 则巧妙地融合了“data flow”&…...

轻量级视频稳定技术:EfficientMotionPro与OnlineSmoother解析
1. 轻量级视频稳定技术概述视频稳定技术是现代计算机视觉领域的重要研究方向,其核心目标是消除因相机抖动导致的画面不稳定现象。传统视频稳定方法通常依赖于复杂的光流计算或3D场景重建,这些方法虽然效果稳定,但计算开销巨大,难以…...

基于RAG与LangChain的法律AI助手:从技术原理到开源实践
1. 项目概述:当AI遇上法律,一个开源法律智能助手的诞生最近几年,AI大模型的热潮席卷了各行各业,从写代码到画图,从客服到教育,似乎没有哪个领域能置身事外。作为一名在技术圈摸爬滚打多年的从业者ÿ…...

网盘直链下载助手:一键获取九大网盘真实下载链接的终极指南
网盘直链下载助手:一键获取九大网盘真实下载链接的终极指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 /…...

使用 Elasticsearch 与 Kibana 中的 PromQL 调查 Kubernetes 基础设施问题
作者:来自 Elastic Miguel Snchez 本文将逐步介绍如何使用 PromQL 在 Elastic Observability 中对 Kubernetes 集群范围内的 CPU 使用情况进行调查,从集群到命名空间再到出现问题的 Pod。 Elasticsearch 现在已经原生支持 PromQL,并且你可以通…...

从‘//’到‘///’:解锁C#注释的正确姿势与隐藏的IDE效率技巧
从‘//’到‘///’:解锁C#注释的正确姿势与隐藏的IDE效率技巧 在代码的世界里,注释就像地图上的标记,不仅指引着后来的开发者理解代码的意图,更是开发者与未来自己对话的桥梁。对于C#开发者而言,注释不仅仅是简单的代…...

JSBSim飞行动力学引擎技术解析与多领域应用指南
JSBSim飞行动力学引擎技术解析与多领域应用指南 【免费下载链接】jsbsim An open source flight dynamics & control software library 项目地址: https://gitcode.com/gh_mirrors/js/jsbsim JSBSim是一款开源的六自由度飞行动力学模型库,为航空航天领域…...

为什么你的Mac无法写入Windows硬盘?5分钟彻底解决NTFS读写难题
为什么你的Mac无法写入Windows硬盘?5分钟彻底解决NTFS读写难题 【免费下载链接】Free-NTFS-for-Mac Nigate: An open-source NTFS utility for Mac. It supports all Mac models (Intel and Apple Silicon), providing full read-write access, mounting, and manag…...