ROS机器人实用技术与常见问题解决

问题速查手册(时实更新)更加全面丰富的问题手册记录
1.机器人使用GPARTED挂载未分配空间
- 需要在图型界面下操作,建议使用no machine连接 安装gparted磁盘分区工具,
sudo apt-get install gparted -y- 启动软件
sudo gparted- 点击磁盘/内存卡,右键已分配空间,点击Resive/Move

- 将出现的滑块条扡到最右边,点击确认
- 点击应用按钮,一定要点,否则不生效。

- 再次查看磁盘,发现没有分配的空间已挂载到系统
2. 系统内存不足,使用交换内存方法
嵌入式系统在运行视觉导航建图及跑图形界面时,非常消耗内存,这时可能需要设置交换内存,将一部分存储空间作为内存来用:
free -m #查看是否已有交换内存
mkdir swap #新建文件夹
cd swap
sudo dd if=/dev/zero of=sfile bs=1024 count=1000000 #设置1G交换内存,不建议超过2G
sudo mkswap sfile #生成文件
sudo swapon sfile #启用交换内存
free -m #查看是否成功分别代表,全部内存(MB),已使用内存,空闲内存

swap则代表当前本机交换内存,为零代表未设置
注意:
1. 每次开机后都要重新设置才能生效
- 交换内存不是越大越好,不建议超过2G。设置后会减少内存压力,但会使系统变慢
- 交换内存会使内存卡读写变多,寿命变短。
- 当系统运行正常时,不建意使用交换内存,设置交换内存只会让系统变慢,
3. 使用命令配置无线网络(在Xshell中进行)
配置无线网络视频教程
首先通过有线网络或串口登录到设备上
使用ifconfig命令检查当前的网络设备和连接状态,或通过iwconfig命令查找当前设备中的无线网络设备。
如下,其中wlan0就是一张无线网卡。
bingda@robot-srpi3x:~$ ifconfig
eth0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500inet 192.168.31.127 netmask 255.255.255.0 broadcast 192.168.31.255inet6 fe80::3aea:a1e:1c0c:3408 prefixlen 64 scopeid 0x20<link>ether 00:11:22:73:8b:64 txqueuelen 1000 (Ethernet)RX packets 54371 bytes 41065706 (41.0 MB)RX errors 0 dropped 1148 overruns 0 frame 0TX packets 105234 bytes 117558020 (117.5 MB)TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0device interrupt 43 base 0xa000 lo: flags=73<UP,LOOPBACK,RUNNING> mtu 65536inet 127.0.0.1 netmask 255.0.0.0inet6 ::1 prefixlen 128 scopeid 0x10<host>loop txqueuelen 1000 (Local Loopback)RX packets 988 bytes 334612 (334.6 KB)RX errors 0 dropped 0 overruns 0 frame 0TX packets 988 bytes 334612 (334.6 KB)TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0wlan0: flags=4099<UP,BROADCAST,MULTICAST> mtu 1500ether 08:e9:f6:ae:d8:04 txqueuelen 1000 (Ethernet)RX packets 17237 bytes 5042234 (5.0 MB)RX errors 0 dropped 934 overruns 0 frame 0TX packets 1034 bytes 380898 (380.8 KB)TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0bingda@robot-srpi3x:~$ iwconfig
lo no wireless extensions.eth0 no wireless extensions.wlan0 IEEE 802.11 ESSID:off/any Mode:Managed Access Point: Not-Associated Tx-Power=31 dBm Retry short limit:7 RTS thr:off Fragment thr:offPower Management:onsit0 no wireless extensions.tunl0 no wireless extensions.
接下来通过nmcli工具配置wifi连接,其中your_ap是需要连接的wifi热点名,your_password是热点密码
Tips:在命令中输入connect后可以使用TAB自动补全工具列出周围的热点
sudo nmcli device wifi connect your_ap password your_password输入完成后执行,提示”Device 'wlan0' successfully activated with 'd6a46eb9-c0e3-4c60-9f2b-d6f7ee32de02'.“即为连接成功。
4.修改机器人的主机名
bingda为用户名,robot-rpi4为主机名,一般不建议修改用户名,会涉及到很多权限问题
但主机名是可以修改的
bingda@robot-rpi4:~$
sudo vim /etc/hostname
如修改成robot-rpi4-1

修改成所需的,任何情况下都不建议设置成中文字符,保存后重启机器人主机即可生效
5.apt安装和源码安装功能
例如rtabmap
【ros】rtabmap源码安装_rtabmap安装_星丶星茶会的博客-CSDN博客
1.apt安装与卸载
sudo apt-get install ros-melodic-rtabmap ros-melodic-rtabmap-ros
sudo apt-get remove ros-melodic-rtabmap ros-melodic-rtabmap-ros2.源码安装
cd ~
git clone https://github.com/introlab/rtabmap.git rtabmap
cd rtabmap/build
cmake -DCMAKE_INSTALL_PREFIX=~/pcb2pgm_ws/devel ..
make -j4
make installcd ~/pcb2pgm_ws
git clone https://github.com/introlab/rtabmap_ros.git src/rtabmap_ros
catkin_make -j1 6.如何修改小车的导航配置相关参数
可以参考:
如图,进入robot_navigation/param/对应车型
出现常见配置
如各文件名称所示,此处修改对应车型的对应配置
所有参数不能没有限制乱配,其参数量受车型及处理能力影响,特别是增加速度的操作必须逐步增加测试,否则会导致导航无法运行

此处配置文件即是对应的导航文件。小车所用算法均为二进制包安装方式,即无法看到源码,具体解释参考本文第5条,如果想使用源码安装,可以参考以下链接进行使用。更改算法源码及使用源码编译均需要有足够的ROS和UBUNTU使用经验,源码安装及修改请自行查找资料,不提供技术支持。
- 冰达仓地址:https://gitee.com/bingda-robot/
- move_base全局规划: https://github.com/ros-planning/navigation.git
- DWA局部规划:https://github.com/ros-planning/navigation
- TEB规划:https://github.com/rst-tu-dortmund/teb_local_planner.git
- gmapping建图: https://github.com/ros-perception/slam_gmapping.git
- cartographer建图: https://github.com/cartographer-project/cartographer_ros.git
- hector建图:https://github.com/tu-darmstadt-ros-pkg/hector_slam.git
- karto建图:https://code.ros.org/svn/ros-pkg/stacks/slam_karto/trunk
- RtabmapVSLAM: https://github.com/introlab/rtabmap.git
https://github.com/introlab/rtabmap_ros.git
- NCNN: https://github.com/Tencent/ncnn/
所有功能算法均可百度获得链接,使用及源码编译方法也可百度。
7.20.04 人脸识别例程出错
opencv版本命名的改动,导致找不到opencv包,分别执行下列命令设置一个软链接即可
sudo apt install opencv-data
sudo ln -s /usr/share/opencv4/ /usr/share/opencv
8.桌面模式要求输入密码
sudo usermod -a -G bluetooth bingda
sudo usermod -a -G netdev bingda
9.gazebo在虚拟机里很卡
可能是因为硬件加速造成的不兼容或其它问题,可以尝试关闭硬件加速
参考如下(来自网上,不保证有效)

10.有时系统明明启动,但是无法连接nomachine
出现这种情况有多种原因:
- 路由器有防火墙,在路由器里关闭防火墙。实测水星 360 小米三个路由器经常性发生连接异常,尽量避免使用以上三种品牌路由器
- 电路网络必须选择专用模式,不要用公用模式
- 或以远程SSH登录到小车,执行
sudo /usr/NX/bin/nxserver --restart
[sudo] password for bingda:
NX> 162 Service: nxd already disabled.
NX> 162 Service: nxserver already disabled.
NX> 162 Service: nxnode already disabled.
NX> 111 New connections to NoMachine server are enabled.
NX> 161 Enabled service: nxserver.
NX> 161 Enabled service: nxnode.
NX> 161 Enabled service: nxd.
- 如果3有效,则进入后,点上方nomahine show main window

如图,点击setting -》status 勾选 start the server at system startup开机自启动即可

11.如何更新冰达ROS的功能包
到达功能包下,针对新系统
- 移动到功能包下
cd ~/catkin_ws/src/bingda_ros1_noetic
- 恢复功能包状态,会删除已建好的地图及更改的代码,请注意备份
git reset --hard
- 强制更新功能包
git pull
如果系统比较老,没有/bingda_ros1_noetic统一功能包目录,则需进入每个功能包执行上述2-3命令
12.JETSON NANO无法识别无线网卡, 没有WLAN0 WIFI
sudo gedit /boot/extlinux/extlinux.conf

增加pcie_aspm=off保存后重启,如果不能解决修改pcie_aspm=on ,保存后重启
13.修改进代码不能用,怎么快速恢复代码
冰达的ROS包都有使用git ,使用git 进行恢复
cd ~/catkin_ws/src/bingda_xxx 进入功能包
git reset --hard 强行恢复
git pull 拉取最新代码(需联网)
如果仍不能恢复则直接
14.主板和控制器的串口连接 ubuntu串口映射
ubuntu的物理硬件端口是要权限的,并且不同设备命名不一样,所以我们需要做UDEV映射
roscd base_control/script/udev可以进入udev目录
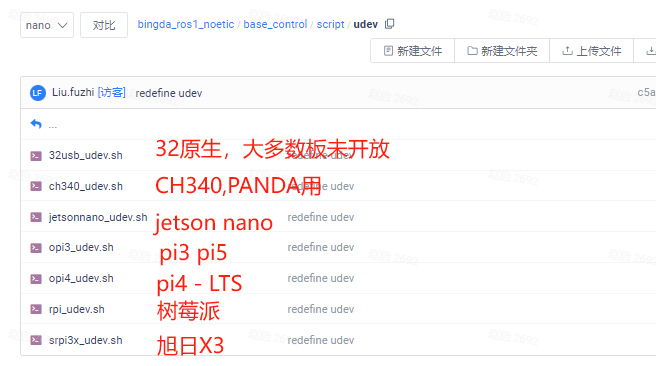
根据不同板卡 sudo ./***.sh即可完成,执行后重启生效
注意:冰达所有镜像均已执行,一般情况如果出现找不到端口,可以直接刷机恢复
15.冰达的编程实战代码地址
B站视频:ROS编程入门ROS机器人中级-ROS编程入门_哔哩哔哩_bilibili
git clone bingda_tutorials: ROS核心教程--初级教程
B站视频:机器人编程实战ROS机器人进阶-机器人编程实战_哔哩哔哩_bilibili
git clone bingda_application: 冰达机器人进阶课程例程参考源码
相关文章:
ROS机器人实用技术与常见问题解决
问题速查手册(时实更新)更加全面丰富的问题手册记录 1.机器人使用GPARTED挂载未分配空间 需要在图型界面下操作,建议使用no machine连接 安装gparted磁盘分区工具, sudo apt-get install gparted -y 启动软件 sudo gparted 点击磁盘/内存…...
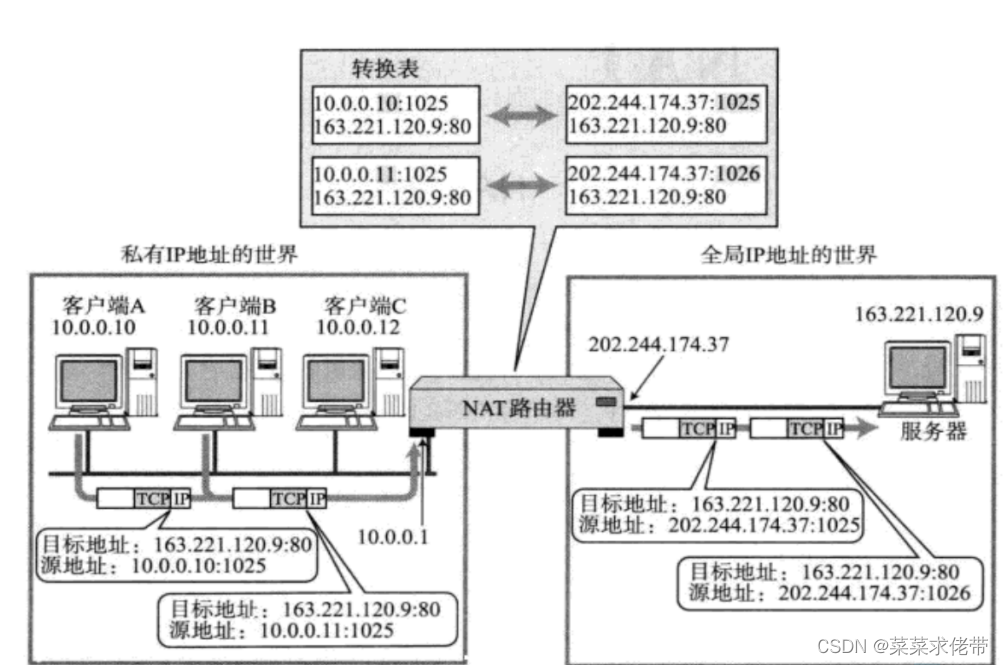
Linux学习之IP协议
前言: 在学习IP协议i前,我们其实知道网络协议栈是一层层的,上层封装好之后就传给下层,对于我们正要学习到的TCP协议,在对数据进行封装之后,并不是直接就将数据进行传输,而是交给下一层网络层进…...
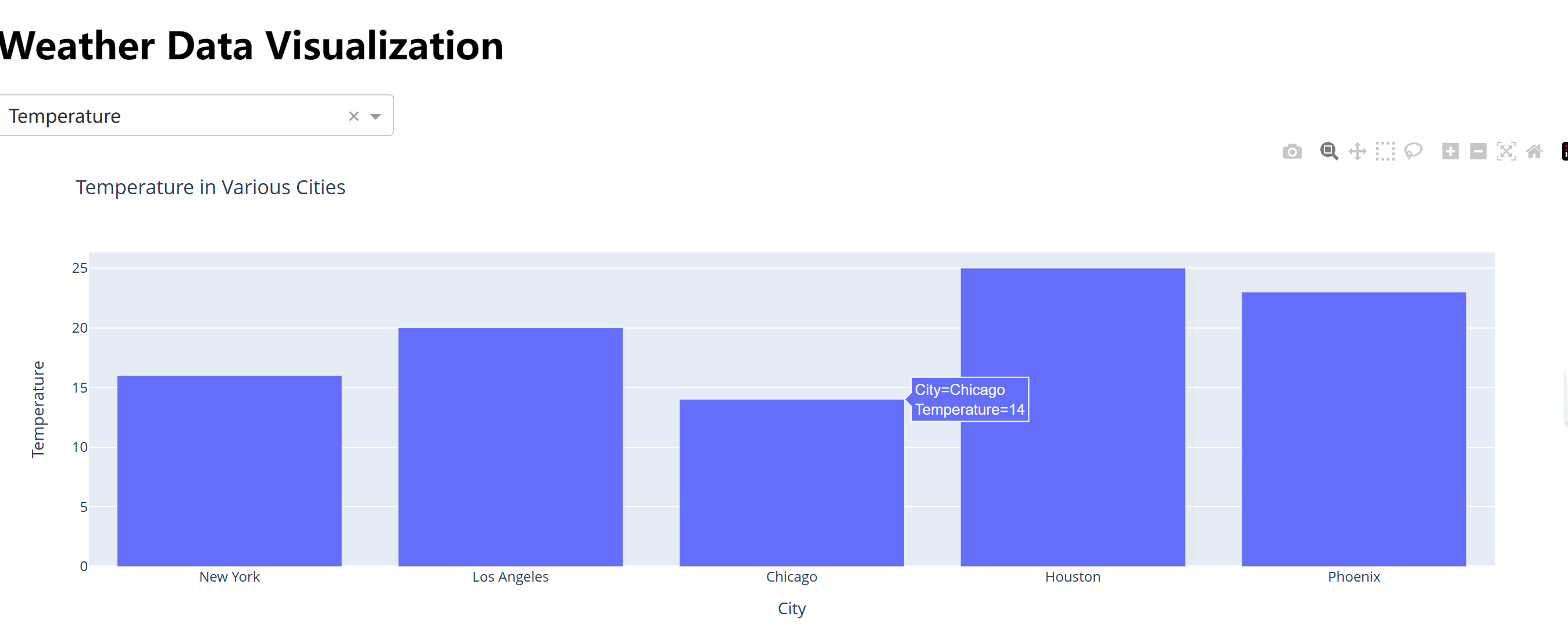
Python Dash库:一个Web应用只需几行代码
大家好,在数据科学领域,数据可视化是将数据以图形化形式展示出来,帮助我们更直观地理解数据。Python中有一个非常流行的数据可视化库叫做Dash,Dash以其简洁、高效和强大的功能而闻名,它允许开发者快速构建交互式Web应用…...
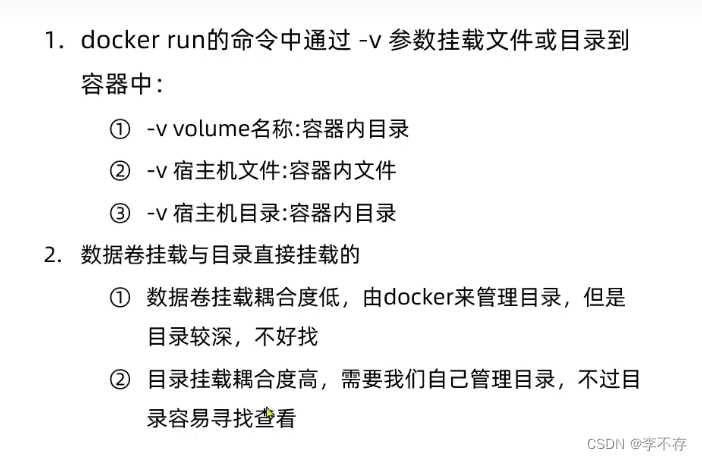
用Docker 创建并运行一个MySQL容器
可以在DockerHub官网上荡:mysql - Official Image | Docker Hub 指令是:docker pull mysql; 因为文件比较大可能时间比较长,我是跟着黑马的课走的 课程提供的有文件,我就用已有的资源了。 在tmp目录里放入mysql.tar包 然后cd进去 输入指令:docker lo…...

在Java中如何有效地处理内存泄露
在Java中,处理内存泄露有多种方法,以下是其中三种常见的方法及其原理和适用场景: ## 1. 合理使用垃圾回收机制 Java中的垃圾回收机制(Garbage Collection,GC)是一种自动化的内存管理技术,它可以…...
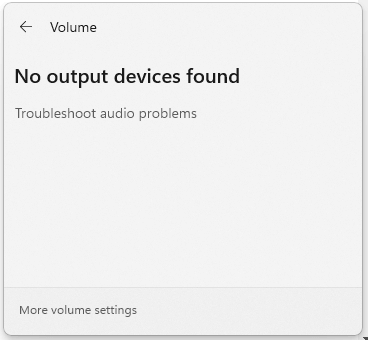
值得收藏!修复Windows 10/11中找不到输出或输入设备的五种方法
序言 这篇文章主要关注处理声音输出/输入设备未发现的问题。它提供了许多可行的方法,帮助了许多Windows用户。阅读以下内容以找到你的解决方案。 最近,我将Windows 10更新到21H2,发现我的音频无法工作。当我把鼠标放在任务栏上的声音图标(上面有一个十字图标)上时,它会…...
)
Slurm运行pytorch深度学习模型(小白版)
Slurm背景: Slurm 是一种开源的作业调度系统,它用于管理大型计算集群中的计算资源和作业。你可以把它想象成一个“交通管制员”,负责管理计算集群中的各种任务,确保它们按照用户设定的规则有序地执行。 Slurm 的主要功能包括&…...
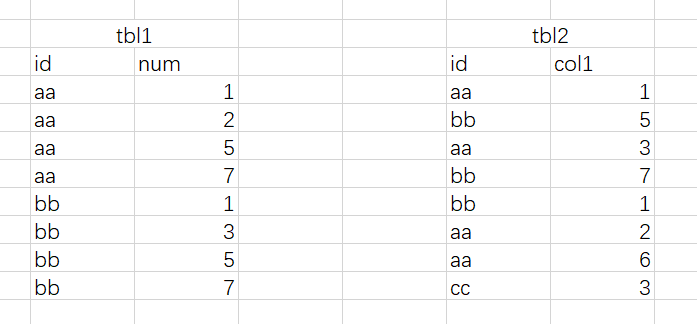
SQL如何利用Bitmap思想优化array_contains()函数
目录 0 问题描述 1 位图思想 2 案例实战 3 小结 0 问题描述 在工作中,我们往往使用array_contains()函数来进行存在性问题分析,如判断某个数是否在某个数组中,但是当表数据量过多,存在大量array_contains()函数时,…...
面试官:打开了一个新窗口,怎么知道这个窗口已经被打开过?
前言 我们现在来想这么一个场景,在掘金的文章管理页打开了一篇文章草稿,然后点击编辑,这个时候打开新标签页 A ,再点击一次编辑,打开了标签页 B 。 此时如果你在 A 编辑, B 是感知不到 A 的内容变动的&am…...
机器学习项目实践-基础知识部分
环境建立 我们做项目第一步就是单独创建一个python环境,Python新的隔离环境 创建:python -m venv ml 使用:.\Scripts\activate python -m venv ml 是在创建一个名为 ml 的虚拟环境,这样系统会自动创建一个文件夹ml,…...

CNN卷积神经网络,TensorFlow面试题
目录 CNN卷积神经网络 什么是TensorFlow? 张量是什么 TensorFlow有什么优势?...
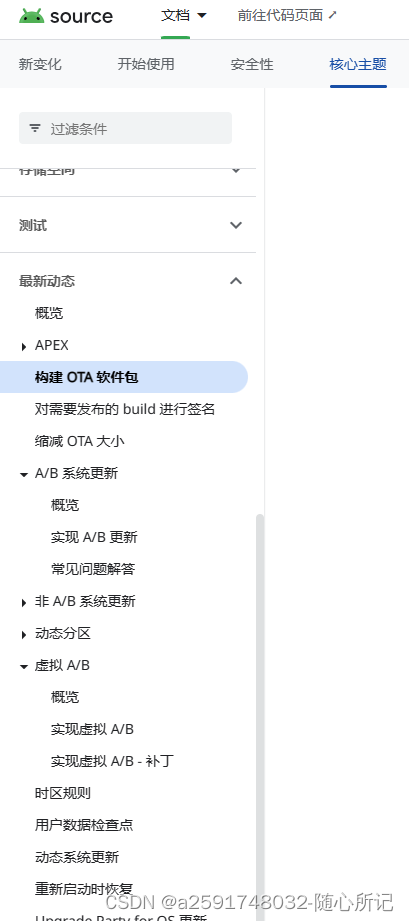
Android 官网Ota介绍
构建 OTA 软件包 | Android 开源项目 | Android Open Source Project...
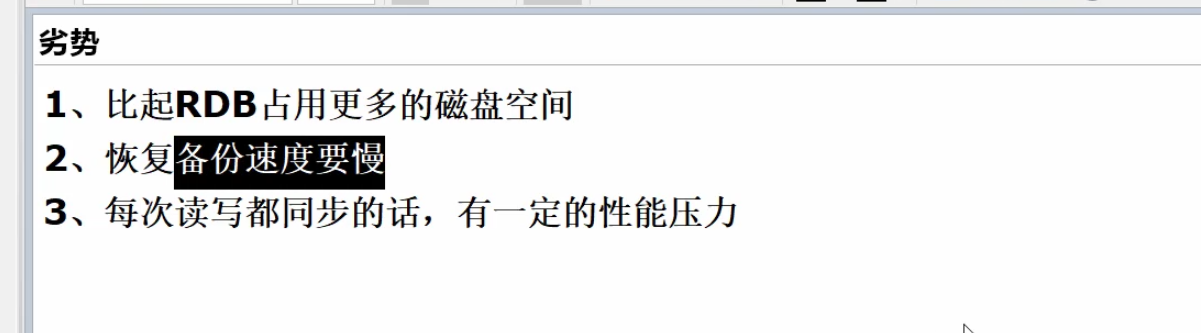
Redis(持久化)
文章目录 1.RDB1.介绍2.RDB执行流程3.持久化配置1.Redis持久化的文件是dbfilename指定的文件2.配置基本介绍1.进入redis配置文件2.搜索dbfilename,此时的dump.rdb就是redis持久化的文件3.搜索dir,每次持久化文件,都会在启动redis的当前目录下…...
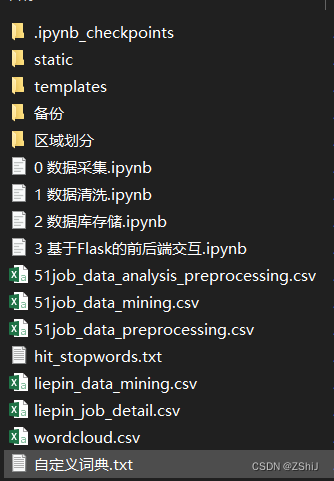
基于Flask的岗位就业可视化系统(一)
🌟欢迎来到 我的博客 —— 探索技术的无限可能! 🌟博客的简介(文章目录) 前言 本项目综合了基本数据分析的流程,包括数据采集(爬虫)、数据清洗、数据存储、数据前后端可视化等 推荐…...
)
嵌入式学习68-C++(运算符重载和虚函数)
知识零碎: cin >> n 相当于scanf C系统提供的6种基本函数 …...

UVA1048/LA3561 Low Cost Air Travel
UVA1048/LA3561 Low Cost Air Travel 题目链接题意输入格式输出格式 分析AC 代码 题目链接 本题是2006年ICPC世界总决赛的A题 题意 很多航空公司都会出售一种联票,要求从头坐,上飞机时上缴机票,可以在中途任何一站下飞机。比如,假…...

学习和分析各种数据结构所要掌握的一个重要知识——CPU的缓存利用率(命中率)
什么是CPU缓存利用率(命中率),我们首先要把内存搞清楚。 硬盘是什么,内存是什么,高速缓存是什么,寄存器又是什么? 我们要储存数据就要运用到上面的东西。首先里面的硬盘是可以无电存储的&#…...

IOS自动化—将WDA打包ipa批量安装驱动
前言 CSDN: ios自动化-Xcode、WebDriverAgent环境部署 ios获取原生系统应用的包 如果Mac电脑没有配置好Xcode相关环境,可以参考以上文章。 必要条件 Mac电脑,OS版本在12.4及以上(低于这个版本无法安装Xcode14,装不了Xcode14就…...
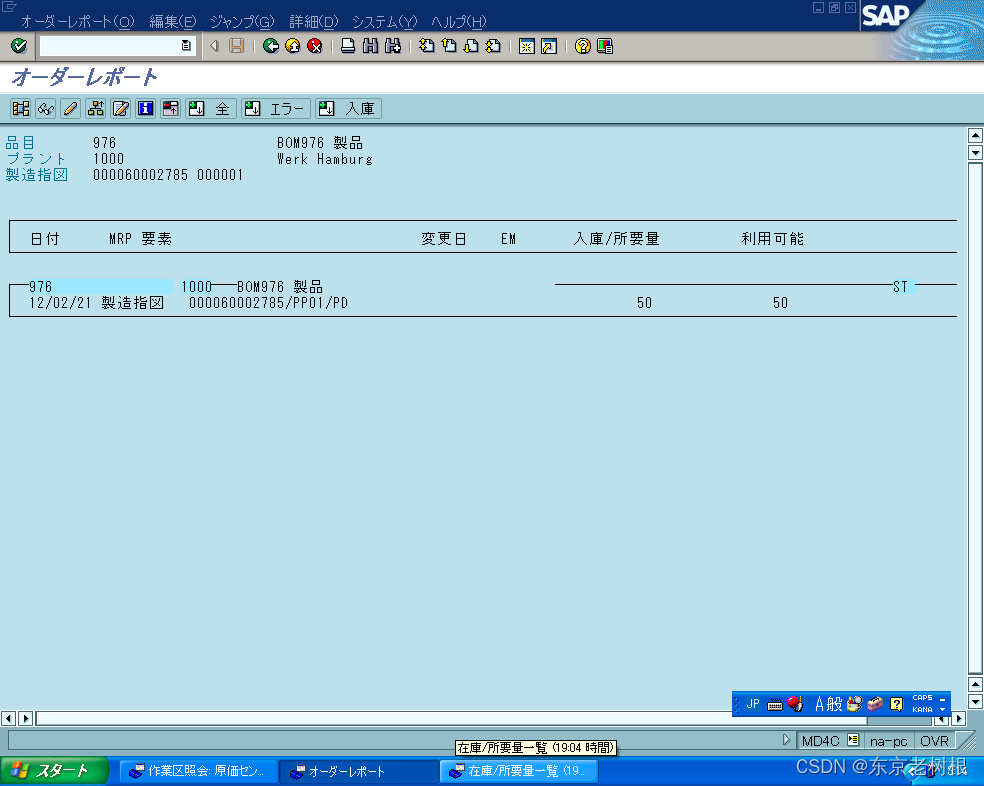
SAP PP学习笔记12 - 评估MRP的运行结果
上一章讲了MRP的概念,参数,配置等内容。 SAP PP学习笔记11 - PP中的MRP相关概念,参数,配置-CSDN博客 本章来讲 MRP跑完之后呢,要怎么评估这个MRP的运行结果。 1,Stock/Requirements List and MRP List 在…...
AndroidStudio的Iguana版的使用
1.AndroidStudio介绍 Android Studio 是用于开发 Android 应用的官方集成开发环境 (IDE)。Android Studio 基于 IntelliJ IDEA 强大的代码编辑器和开发者工具,还提供更多可提高 Android 应用构建效率的功能,例如: 基于 Gradle 的灵活构建系统…...

分布式事务解决方案TCC实战
分布式事务解决方案TCC实战 一、分布式事务概述 在分布式系统中,事务跨越多个服务或数据库,传统的ACID事务无法直接适用,需要采用分布式事务解决方案。 1.1 分布式事务挑战 挑战说明网络延迟跨服务调用存在网络延迟和超时数据一致性多个数据源…...

2026年AI Agent正在变成企业的数字员工
本文探讨了技术圈对AI关注焦点的转变,从单纯关注模型能力转向关注AI Agent的实际应用价值。通过引用Anthropic和Material联合调研报告,文章指出AI Agent已广泛应用于多阶段工作流、生产代码开发、数据分析和内部流程自动化,并带来可衡量的经济…...

一张表算清账:发券营销的ROI该怎么算?
一、 别被“领券量”忽悠了 后台显示发了5000张券,老板很高兴,觉得生意稳了。结果月底一算账,发现不仅没赚,还贴进去几千块广告费。问题出在哪? 只看“领”,不看“核”。二、 核心指标:核销率…...

收藏!AI时代,软件工程基本功才是你的核心竞争力
在AI coding时代,软件工程的基本功不仅没有过时,反而比以往任何时候都更加重要。AI是放大器,好的代码库能提升效率,而模糊混乱的代码库则会放大混乱。接口、边界、领域语言和测试等“老派”的基本功,是开发者手中杠杆率…...

FlicFlac:3分钟掌握Windows音频格式转换的终极免费工具
FlicFlac:3分钟掌握Windows音频格式转换的终极免费工具 【免费下载链接】FlicFlac Tiny portable audio converter for Windows (WAV FLAC MP3 OGG APE M4A AAC) 项目地址: https://gitcode.com/gh_mirrors/fl/FlicFlac 还在为不同设备间的音频格式兼容性问…...

户外太阳能监控供电方案:如何用CN3791芯片为3.7V锂电池设计稳定充电电路?
户外太阳能监控供电方案:CN3791芯片在3.7V锂电池充电电路中的实战设计 清晨六点,当第一缕阳光洒在郊区的通信基站上,搭载CN3791芯片的太阳能供电系统已经开始为锂电池注入能量——这正是现代户外监控设备赖以生存的"能量心脏"。在无…...

CARLA与Autoware融合实践:从自定义地图构建到闭环仿真测试
1. 自定义高精地图的构建与格式转换 在自动驾驶仿真开发中,高精地图是车辆感知和决策的基础。CARLA仿真环境提供了灵活的地图编辑工具,但要将自建地图与Autoware无缝对接,需要特别注意数据格式的兼容性。我曾在实际项目中遇到过多次地图导入…...
)
保姆级教程:在Ubuntu 20.04上从零搭建K230目标检测训练环境(含Anaconda、nncase配置避坑指南)
从零构建K230目标检测训练环境:Anaconda与nncase配置实战指南 在边缘计算设备上部署目标检测模型已成为工业质检、智能安防等场景的热门选择。嘉楠K230凭借其高性价比和低功耗特性,吸引了大量开发者尝试将YOLO等算法部署到该平台。然而,从裸…...

2026 年我作为资深工程师如何使用 LLM Agent:从副驾到主驾的真实工作流转变
从副驾到主驾,2026 年资深工程师的 LLM Agent 实战工作流:哪些交给 Agent,哪些必须自己做。 原文链接:AI 小老六 一年之差:Agent 从「勉强能用」变成了「几乎离不开」 2025 年初,行业里最强的推理模型还是…...

Autovisor智慧树刷课终极指南:2025最全自动化学习解决方案
Autovisor智慧树刷课终极指南:2025最全自动化学习解决方案 【免费下载链接】Autovisor 2025智慧树刷课脚本 基于Python Playwright的自动化程序 [有免安装版] 项目地址: https://gitcode.com/gh_mirrors/au/Autovisor 还在为智慧树网课而烦恼吗?每…...