工业机器人应用实践之玻璃涂胶(篇二)
工业机器人
接上篇文章,浅谈一下实践应用,具体以玻璃涂胶为例:
- 了解工业机器人在玻璃涂胶领域的应用
- 认识工具坐标系的标定方法
- 掌握计时指令的应用
- 掌握人机交互指令的应用
- 掌握等待类指令用法(WaitDI、WaitUnitl 等)
- 认识工业机器人轨迹类应用程序编写
本工作站以汽车前挡风玻璃涂胶为例,利用IRB1410 机器人将胶体均匀地涂抹在玻璃轮廓周围。本工作站中已经预设涂胶效果,需要在此工作站中依次完成I/O 配置、程序数据创建、目标点示教、程序编写及调试,最终完成汽车玻璃的完整涂胶过程。
必要知识储备:
4)清屏指令“TPErase” 运行该指令,则屏幕上的显示全部清空。
5)等待类指令 ① WaitDI 指令 ;指令作用: 等待数字输入信号达到指定状态,并可设置最大等待时间以及超时标识
应用举例:WaitDI di1,1\MaxTime:=3\TimeFlag:=bool1;
执行结果:
指令功能:等待数字输入信号di1 变为1,最大等待时间为3s,若超时则bool1 被赋值为TRUE,程序继续执行下一条指令;若不设最大等待时间,则指令一直等待直至信号变为指定数值。
类似的指令有:WaitGI、WaitAI、WaitDO、WaitGO、WaitAO 等
② WaitUntil 指令
指令作用:等待条件成立,并可设置最大等待时间以及 超时标识
应用举例:WaitUntil reg1=5\MaxTime:=3\TimeFlag:=bool1;
执行结果:
等待数值型数据reg1 变为5,最大等待时间为3s,若超时则bool1被赋值为TRUE,程序继续执行下一条指令;若不设最大等待时间,则指令一直等待直至条件成立。
③ Waittime 指令 指令作用: 等待固定的时间 应用举例:Waittime 0.3;
执行结果:机器人程序执行到该指令时,指针会在此处等待0.3s。
玻璃涂胶任务实现
(1)解压并初始化
1)解压完成后运行

2)置位仿真涂胶启动信号

3)仿真确认后可停止仿真过程

4)备份和机器人恢复出厂设置

(2) I/O 配置
改 虚拟示教器 界面语言;I/O配置过程如下:
“ABB 菜单”-“控制面板”-“配置”,“I/O 主题”,配置I/O 信号

DSQC652 通信板卡的I/O 单元相关参数设置

输出信号doGlue用于控制涂胶枪动作;
输入信号diGlueStart用于启动涂胶信号。

相关文章:
工业机器人应用实践之玻璃涂胶(篇二)
工业机器人 接上篇文章,浅谈一下实践应用,具体以玻璃涂胶为例: 了解工业机器人在玻璃涂胶领域的应用认识工具坐标系的标定方法掌握计时指令的应用掌握人机交互指令的应用掌握等待类指令用法(WaitDI、WaitUnitl 等)认…...

C++ 455. 分发饼干
文章目录 一、题目描述二、参考代码 一、题目描述 示例 1: 输入: g [1,2,3], s [1,1] 输出: 1 解释: 你有三个孩子和两块小饼干,3个孩子的胃口值分别是:1,2,3。 虽然你有两块小饼干,由于他们的尺寸都是1,你只能让胃口值是1的孩…...

未来娱乐新地标?气膜球幕影院的多维体验—轻空间
在中国,一座独特的娱乐场所正在崭露头角:气膜球幕影院。这个融合了气膜建筑与激光投影技术的创新场所,不仅令人惊叹,更带来了前所未有的科幻娱乐体验。让我们一起探索这个未来的娱乐空间,感受其中的多维魅力。 现场演出…...

工业机器人应用实践之玻璃涂胶(篇三)
工业机器人 接上篇文章,浅谈一下实践应用,具体以玻璃涂胶为例: 了解工业机器人在玻璃涂胶领域的应用 认识工具坐标系的标定方法 掌握计时指令的应用 掌握人机交互指令的应用 掌握等待类指令用法(WaitDI、WaitUnitl 等࿰…...
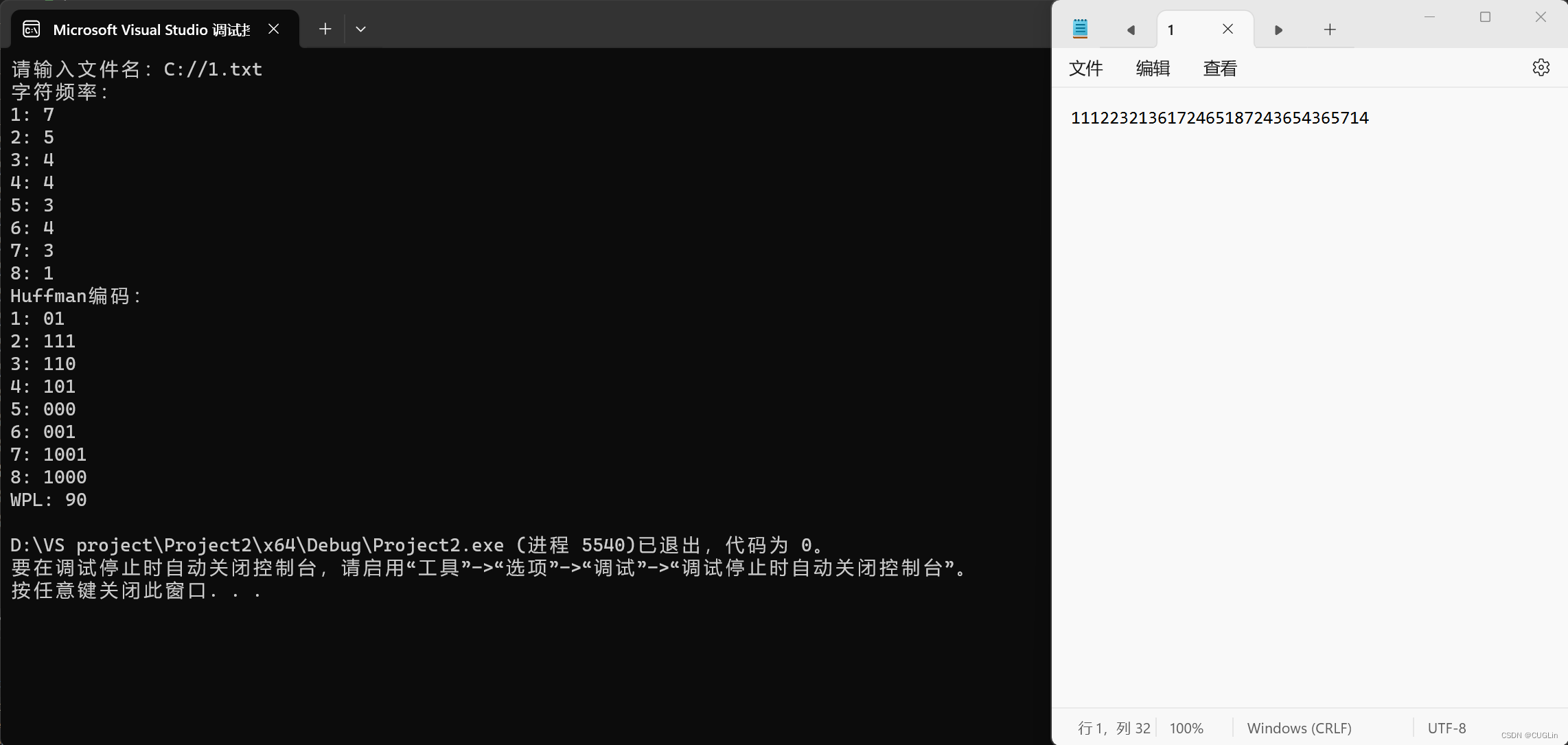
基于Huffman编码的字符串统计及WPL计算
一、问题描述 问题概括: 给定一个字符串或文件,基于Huffman编码方法,实现以下功能: 1.统计每个字符的频率。 2.输出每个字符的Huffman编码。 3.计算并输出WPL(加权路径长度)。 这个问题要求对Huffman编码算…...
scanf报错问题(3种))
处理VS2022中(C/C++)scanf报错问题(3种)
#pragma warning(disable:4996)//第一种:处理scanf在VS2022中报错 #define _CRT_SECURE_NO_WARNINGS//第二种:处理scanf在VS2022中报错 #include<bits/stdc.h> using namespace std; int main() { int a, b; scanf(“%d %d”, &a, &b);//第三种&…...

C#面:Session 喜欢丢值且占内存,Cookis不安全,请问 C# 可以用什么办法代替这两种原始的方法
可以使用 用 ViewState,stateserver。 在 C# 中,ViewState、StateServer 和 Session 都是用于在 Web 应用程序中存储和管理状态信息的机制。它们可以用来在不同的页面之间传递数据或者在同一页面的不同请求之间保持数据的持久性。 ViewState࿱…...

Python并发编程 05 锁、同步条件、信号量、线程队列、生产者消费者模型
文章目录 一、基础概念二、同步锁三、线程死锁和递归锁四、同步条件(event)五、信号量六、线程队列(queue)1、常用方法2、queue模块的三种模式(1)FIFO队列(2)LIFO队列(3&…...
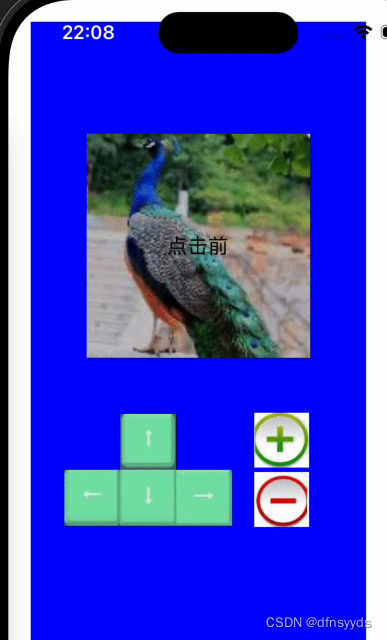
UIKit之UIButton
功能需求: 点击按钮切换按钮的文字和背景图片,同时点击上下左右可以移动图片位置,点击加或减可以放大或缩小图片。 分析: 实现一个UIView的子类即可,该子类包含多个按钮。 实现步骤: 使用OC语言…...

阿里云VOD视频点播流程(2)
二、视频点播 1、入门代码 基于OSS原生SDK上传 ,参考文档:https://help.aliyun.com/zh/vod/user-guide/upload-media-files-by-using-oss-sdks?spma2c4g.11186623.0.0.1f02273fj4lxNJ 视频点播面向开发者提供了丰富的上传方式,其中上传SDK&…...

在Ubuntu上搭建幻兽帕鲁服务器
简介 幻兽帕鲁是一款多人在线角色扮演游戏,玩家可以捕捉和训练各种各样的幻兽,并与其他玩家进行战斗和交易。如果您想拥有自己的幻兽帕鲁服务器,可以按照以下步骤在 Ubuntu 上进行搭建。 准备工作 在开始之前,您需要准备以下几…...

Java中常用类String的不可变性详解
目录 一、String类的概述 二、String不可变性的原理 三、String不可变性的优点 四、String不可变性的缺点及解决方案 五、总结 一、String类的概述 在Java中,String类是一个代表字符串的类。它是Java核心API的一部分,用于处理文本数据。String对象…...
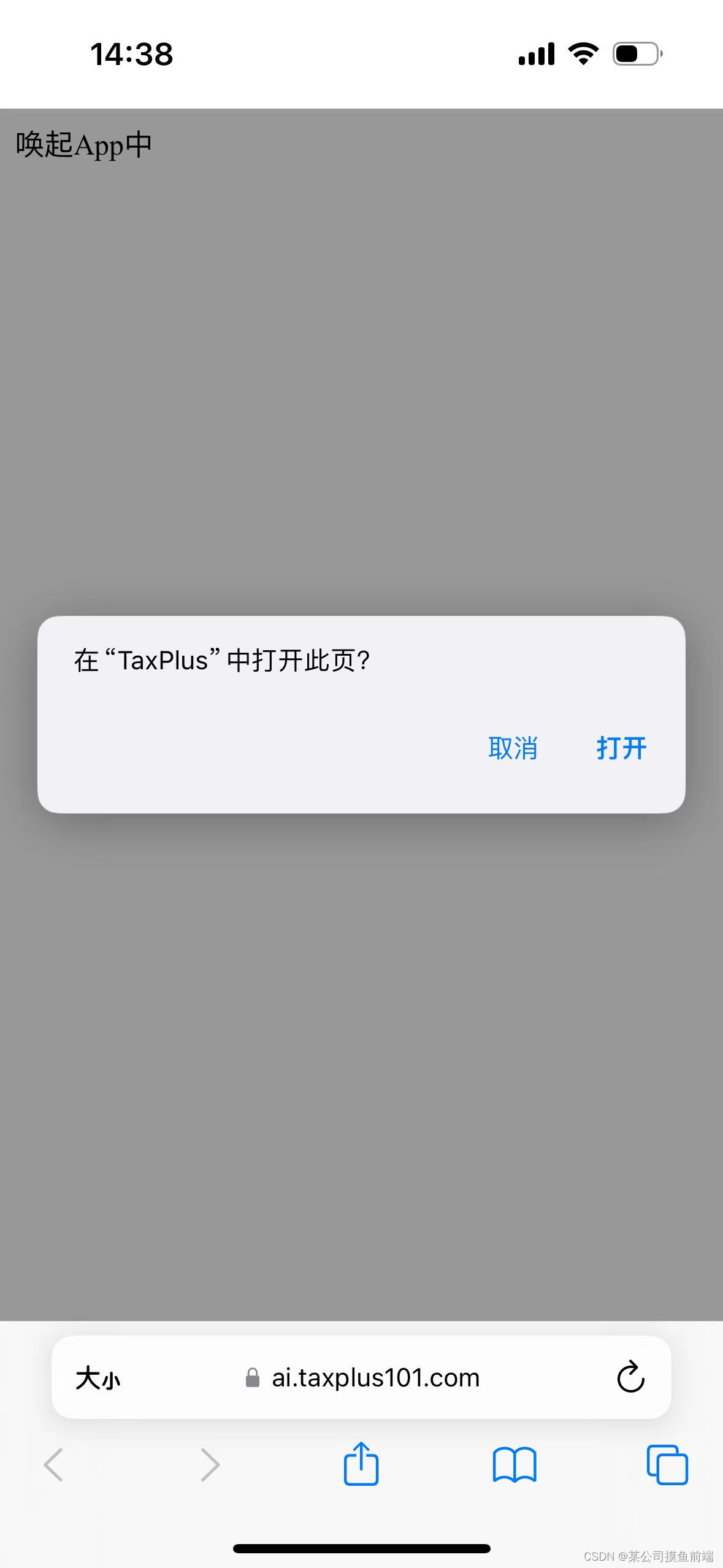
uniapp 自定义App UrlSchemes
需求:外部浏览器H5页面,跳转到uniapp开发的原生app内部。 1、uniapp内部的配置: (1)打开manifest->App常用其他设置,如下,按照提示输入您要设置的urlSchemes: (2&am…...
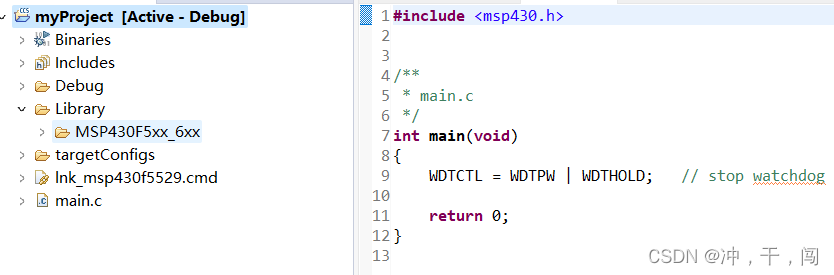
MSP430环境搭建
1.下载ccs编译器 注意:安装路径和工作路径不能出现中文! 没有说明的步骤就点next即可! 1.1下载适合自己电脑的压缩包。 下载好压缩包后解压,点击有图标进行安装。 1.2创建一个文件夹用于安装编译器位置 选择安装地址࿰…...

【Qt C++实现蓝牙互联】
在 Qt C++ 中实现蓝牙互联可以通过 Qt 的蓝牙模块来实现。下面是一个简单的示例,演示如何在 Qt C++ 中使用蓝牙模块进行蓝牙互联,实现搜索设备、连接设备等功能。 // main.cpp #include <QCoreApplication> #include <QBluetoothDeviceDiscoveryAgent> #include…...

AI绘画已如此厉害,为何我们仍需学习绘画?
在这个AI技术日新月异的时代,AI绘画能力的大幅提升已经不是什么新鲜事。它们以惊人的速度和惊人的精细度完成作品,让不少人感叹:“这是不是意味着,未来绘画将完全由AI接管,人类的创作将变得无足轻重?”在这…...
Android 实现背景图片不被拉伸的效果 9-patch图片 .9图
今天碰到个需求,要求不同手机分辨率背景照片不能被拉伸,除了调用系统方法计算当前屏幕大小这个方法外还有一个就是9-patch图片,可以实现除了icon剩下的部位被缩放。 方法:资源文件右击找到9-patch,转为XXX.9.png照片 …...

Java EE/Jakarta EE范畴一览
Java EE(Java Platform, Enterprise Edition)现在已经改名为Jakarta EE,是一套用于开发企业级应用的标准Java平台。它扩展了Java SE(Standard Edition),添加了支持大规模、多层次、可靠、安全、可伸缩和可管…...
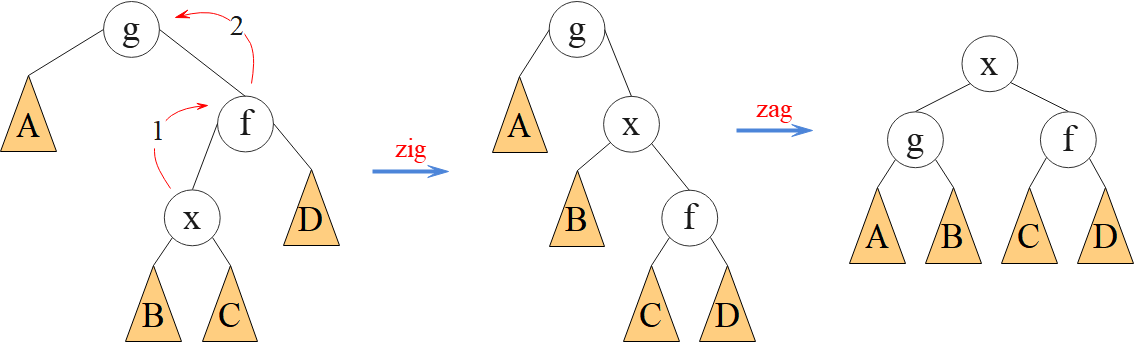
洛谷 P3391:文艺平衡树 ← Splay树模板题
【题目来源】https://www.luogu.com.cn/problem/P3391【题目描述】 您需要写一种数据结构(可参考题目标题),来维护一个有序数列。 其中需要提供以下操作:翻转一个区间,例如原有序序列是 5 4 3 2 1,翻转区间…...
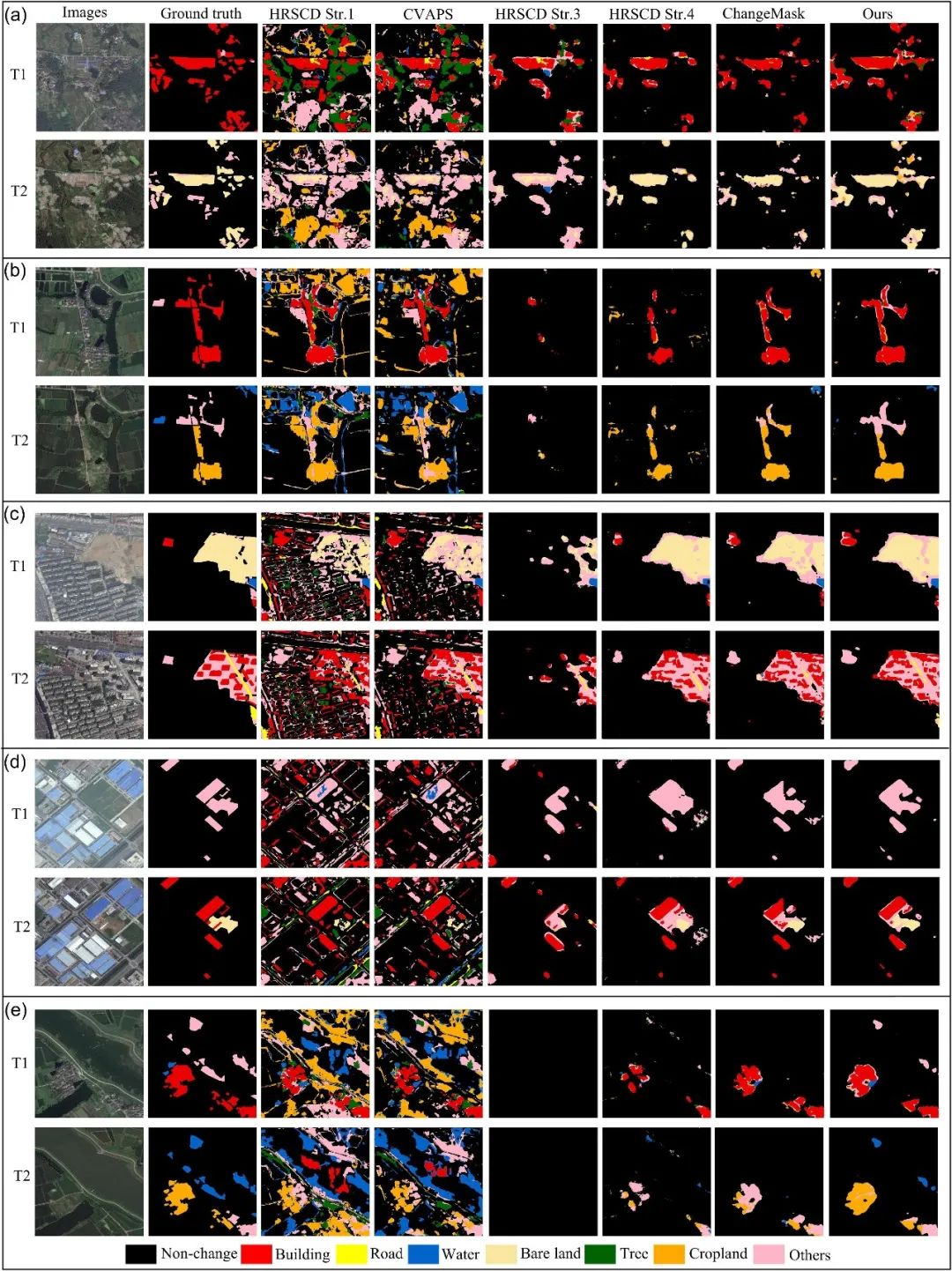
【高校科研前沿】北师大陈晋教授团队在遥感顶刊发表最新成果:ClearSCD模型:在高空间分辨率遥感影像中综合利用语义和变化关系进行语义变化检测
01文章简介 论文名称:The ClearSCD model: Comprehensively leveraging semantics and change relationships for semantic change detection in high spatial resolution remote sensing imagery(ClearSCD模型:在高空间分辨率遥感影像中综合…...

终极ViGEmBus驱动指南:如何让Windows完美识别任何游戏控制器
终极ViGEmBus驱动指南:如何让Windows完美识别任何游戏控制器 【免费下载链接】ViGEmBus Windows kernel-mode driver emulating well-known USB game controllers. 项目地址: https://gitcode.com/gh_mirrors/vi/ViGEmBus 你是否曾经遇到过这样的情况&#x…...

小微团队如何利用Taotoken统一管理多项目API密钥与用量
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 小微团队如何利用Taotoken统一管理多项目API密钥与用量 对于小型开发团队而言,同时推进多个项目是常态。这些项目可能分…...

终极音频解密指南:3分钟解锁QQ音乐加密格式
终极音频解密指南:3分钟解锁QQ音乐加密格式 【免费下载链接】qmc-decoder Fastest & best convert qmc 2 mp3 | flac tools 项目地址: https://gitcode.com/gh_mirrors/qm/qmc-decoder 想要让QQ音乐下载的加密歌曲在任何播放器上自由播放吗?q…...

如何免费解密网易云音乐NCM文件:终极指南释放你的音乐自由
如何免费解密网易云音乐NCM文件:终极指南释放你的音乐自由 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 你是否曾在网易云音乐下载了心爱的歌曲,却发现只能在特定客户端播放?那些加密的NCM格式文…...

从苹果三星2016年困境看消费电子行业创新与供应链管理
1. 行业巨头的十字路口:苹果与三星的2016年镜像2016年,对于全球消费电子行业而言,是一个充满微妙转折的年份。站在聚光灯下的两大巨头——苹果与三星,仿佛站在了同一面镜子的两侧,映照出截然不同的困境,却又…...

Fish-Speech开源语音合成:从VITS原理到中文TTS实战部署
1. 项目概述:当AI遇见声音,一个开源的语音合成新选择最近在语音合成这个圈子里,一个名为 Fish-Speech 的项目开始引起不少开发者和研究者的注意。简单来说,Fish-Speech 是一个开源的、基于深度学习的文本到语音(TTS&am…...

智慧交通系统安全漏洞深度解析:从明文传输到固件攻击的防御启示
1. 项目概述:一次对智慧交通“神经末梢”的深度安全审视2014年的DEF CON黑客大会,向来是安全研究的风向标。那一年,IOActive的首席技术官Cesar Cerrudo在台上展示的,不是某个炫酷的软件漏洞,而是一个关于我们每天经过的…...

混合量子计算:qumode与qubit协同架构解析
1. 混合量子计算基础概念解析 量子计算领域正在经历一场静默的革命——连续变量(qumode)与离散变量(qubit)的混合架构正突破传统计算范式的边界。这种混合架构不是简单的技术叠加,而是通过量子态的精妙耦合,在信息容量与计算稳定性之间建立起全新的平衡点…...

ARM9EJ-S核心调试技术与系统速度访问机制解析
1. ARM9EJ-S核心调试技术概述 在嵌入式系统开发领域,调试技术的重要性不亚于代码编写本身。ARM9EJ-S作为经典的嵌入式处理器核心,其调试子系统设计体现了ARM架构对开发效率的深度考量。这套调试系统不仅仅是简单的"暂停-查看"工具,…...

Unity-Editor-Toolbox 上下文菜单操作:复制粘贴组件的简单方法
Unity-Editor-Toolbox 上下文菜单操作:复制粘贴组件的简单方法 【免费下载链接】Unity-Editor-Toolbox Tools, custom attributes, drawers, hierarchy overlay, and other extensions for the Unity Editor. 项目地址: https://gitcode.com/gh_mirrors/un/Unity-…...