记录:卡尔曼滤波推导
参考:古月居-卡尔曼滤波
一、高斯分布(Gaussian Distribution)
- 一维高斯分布:随机变量 X X X服从数学期望 μ \mu μ、方差 σ 2 \sigma^2 σ2的正态分布,概率密度函数为 p ( x ) p(x) p(x)。
X ∼ N ( μ , σ 2 ) X \sim N(\mu, \sigma^2) X∼N(μ,σ2)
p ( x ) = 1 2 π σ e x p ( − 1 2 ( x − μ ) 2 σ 2 ) p(x) = \frac{1}{\sqrt{2\pi}\sigma}exp(-\frac{1}{2}\frac{(x-\mu)^2}{\sigma^2}) p(x)=2πσ1exp(−21σ2(x−μ)2) - 高维高斯分布:数学期望 μ \mu μ为 1 × n 1×n 1×n的矩阵, Σ \Sigma Σ为 n × n n×n n×n的协方差矩阵。
X ∼ N ( μ , Σ ) X \sim N(\mu, \Sigma) X∼N(μ,Σ)
p ( x ) = 1 ( 2 π ) n d e t ( Σ ) e x p ( − 1 2 ( x − μ ) T Σ − 1 ( x − μ ) ) p(x) = \frac{1}{\sqrt{(2\pi)^ndet(\Sigma)}}exp(-\frac{1}{2}(x - \mu)^T\Sigma^{-1}(x-\mu)) p(x)=(2π)ndet(Σ)1exp(−21(x−μ)TΣ−1(x−μ))
注:
- 总体方差 σ 2 \sigma^2 σ2
x i x_i xi是表示第 i i i个样本的观测值, N N N是总体样本数量, n n n是采样样本数量, μ \mu μ是总体均值( μ = 1 N Σ i = 1 N x i \mu=\frac{1}{N}{\Sigma}_{i=1}^{N}x_i μ=N1Σi=1Nxi), x ˉ \bar{x} xˉ是采样样本均值( x ˉ = 1 n Σ i = 1 n x i \bar{x}=\frac{1}{n}{\Sigma}_{i=1}^{n}x_i xˉ=n1Σi=1nxi)。根据n个采样样本的方差估计总体方差,有如下两种情况。
(1)如果总体均值 μ \mu μ已知,那么总体方差:
σ 2 = Σ i = 1 N ( x i − μ ) 2 N (1) \sigma^2=\frac{{\Sigma}_{i=1}^N(x_i-\mu)^2}{N} \tag{1} σ2=NΣi=1N(xi−μ)2(1)
(2)在总体均值未知的情况下,根据样本方差估计总体方差,则分为有偏估计和无偏估计。
- 有偏估计:
σ 2 = Σ i = 1 n ( x i − x ˉ ) 2 n (2) \sigma^2=\frac{{\Sigma}_{i=1}^n(x_i-\bar{x})^2}{n} \tag{2} σ2=nΣi=1n(xi−xˉ)2(2)- 无偏估计
σ 2 = Σ i = 1 n ( x i − x ˉ ) 2 n − 1 (3) \sigma^2=\frac{{\Sigma}_{i=1}^n(x_i-\bar{x})^2}{n-1} \tag{3} σ2=n−1Σi=1n(xi−xˉ)2(3)
- 协方差
在无偏估计的基础上,协方差的定义如下,其中 x ˉ \bar{x} xˉ和 y ˉ \bar{y} yˉ分别表示两个随机变量对应的观测样本均值。
σ ( x , y ) = 1 n − 1 Σ i = 1 n ( x i − x ˉ ) ( y i − y ˉ ) ) (4) \sigma(x,y)=\frac{1}{n-1}\Sigma_{i=1}^{n}(x_i-\bar{x})(y_i-\bar{y})) \tag{4} σ(x,y)=n−11Σi=1n(xi−xˉ)(yi−yˉ))(4)
则公式(3)可以写成如下格式,表示随机变量 x x x关于其自身的协方差。
σ 2 = Σ i = 1 n ( x i − x ˉ ) 2 n − 1 = σ ( x , x ) \sigma^2=\frac{{\Sigma}_{i=1}^n(x_i-\bar{x})^2}{n-1} =\sigma(x,x) σ2=n−1Σi=1n(xi−xˉ)2=σ(x,x)- 协方差矩阵
给定d个随机变量 X = { x 1 , x 2 , x 3 , . . . , x d } X=\{x_1, x_2, x_3, ..., x_d\} X={x1,x2,x3,...,xd},有 x k ∈ X , k = 1 , 2 , . . . , d x_k\in{X},k=1,2,...,d xk∈X,k=1,2,...,d,则这些随机变量的方差为:
σ ( x k , x k ) = 1 n − 1 Σ i = 1 n ( x k i − x ˉ k ) \sigma(x_k, x_k)=\frac{1}{n-1}\Sigma_{i=1}^n(x_{ki}-{\bar{x}}_k) σ(xk,xk)=n−11Σi=1n(xki−xˉk)
其中, x k i x_{ki} xki表示第 k k k个随机变量 x k x_{k} xk的第 i i i个观测值, n n n表示采样样本数量,每个随机变量均采样了 n n n个样本。对于这些随机变量,求两两之间的协方差,则有:
σ ( x m , x k ) = 1 n − 1 Σ i = 1 n ( x m i − x ˉ m ) ( x k i − x ˉ k ) \sigma(x_m, x_k)=\frac{1}{n-1}\Sigma_{i=1}^n(x_{mi}-{\bar{x}}_m)(x_{ki}-{\bar{x}}_k) σ(xm,xk)=n−11Σi=1n(xmi−xˉm)(xki−xˉk)
所以,协方差矩阵为:
Σ = [ σ ( x 1 , x 1 ) . . . σ ( x 1 , x d ) ⋮ ⋱ ⋮ σ ( x d , x 1 ) . . . σ ( x d , x d ) ] ∈ R d × d \Sigma = \begin{bmatrix} \sigma(x_1, x_1) & ... & \sigma(x_1, x_d)\\ \vdots & \ddots & \vdots \\ \sigma(x_d, x_1) & ... & \sigma(x_d, x_d)\end{bmatrix} \in{\R^{d×d}} Σ= σ(x1,x1)⋮σ(xd,x1)...⋱...σ(x1,xd)⋮σ(xd,xd) ∈Rd×d参考:总体方差的有偏与无偏估计、高斯分布、如何理解多维高斯分布?
二、卡尔曼滤波
经典线性卡尔曼滤波推导
【参考:一文看懂卡尔曼滤波、卡尔曼滤波算法详细推导】
- 建模
已知一辆汽车直线行驶,已知它在 t − 1 t-1 t−1时刻的位置是 p t − 1 p_{t-1} pt−1,速度是 v t − 1 v_{t-1} vt−1,加速度是 u u u, t t t时刻与 t − 1 t-1 t−1时刻的时间差为 Δ t \Delta_{t} Δt。理想情况下,根据速度、位移、加速度之间的关系,它在 t t t时刻的位置 p t p_{t} pt和速度 v t v_{t} vt 可以表述为:
v t = v t − 1 + u Δ t (1) v_t=v_{t-1}+u\Delta_{t} \tag{1} vt=vt−1+uΔt(1)
p t = p t − 1 + u t − 1 Δ t + 1 2 u ( Δ t ) 2 (2) p_t=p_{t-1}+u_{t-1}\Delta_{t}+\frac{1}{2} u{(\Delta_{t})}^2\tag{2} pt=pt−1+ut−1Δt+21u(Δt)2(2)
直接根据上一时刻状态预测下一时刻的状态得到的预测结果没有考虑过程误差和传感器测量误差。实际情况误差是存在的,卡尔曼滤波即是通过观测信息寻求一个最优的状态估计。上式写成矩阵形式:
[ p t v t ] = [ 1 Δ t 0 1 ] [ p t − 1 v t − 1 ] + [ ( Δ t ) 2 2 Δ t ] u (3) \begin{bmatrix} p_t \\ v_t \end{bmatrix}=\begin{bmatrix} 1 & {\Delta}_t \\ 0 & 1 \end{bmatrix} \begin{bmatrix} p_{t -1}\\ v_{t -1} \end{bmatrix} + \begin{bmatrix} \frac{({\Delta}_t)^2}{2} \\ {\Delta}_t \end{bmatrix}u \tag{3} [ptvt]=[10Δt1][pt−1vt−1]+[2(Δt)2Δt]u(3)
即可写成:
x t = F x t − 1 + B u (4) x_t=Fx_{t-1}+Bu \tag{4} xt=Fxt−1+Bu(4)
考虑过程误差 w t w_t wt,上式可写成:
x t = F x t − 1 + B u + w t (5) x_t=Fx_{t-1}+Bu+w_{t} \tag{5} xt=Fxt−1+Bu+wt(5)
通过传感器观测可对 t t t时刻的速度和位置进行测量,假设直接预测结果与传感器观测的结果之间是线性变换关系,并考虑传感器测量误差 v t v_t vt,则观测方程可写为:
z t = H x t + v t (6) z_t=Hx_t+v_t \tag{6} zt=Hxt+vt(6)
一般假设过程误差和观测误差服从高斯分布,即 p ( W ) ∼ N ( 0 , Q ) p(W)\sim{N(0,Q)} p(W)∼N(0,Q)和 p ( V ) ∼ N ( 0 , R ) p(V)\sim{N(0,R)} p(V)∼N(0,R), Q Q Q和 R R R为协方差矩阵,即 Q = E [ W W T ] Q=E[WW^T] Q=E[WWT]和 R = E [ V V T ] R=E[VV^T] R=E[VVT]。 Q Q Q和 R R R为超参数,根据经验设定,推导过程中认为已知。
- 变量定义
x t x_t xt:状态真实值
x ~ t − {\tilde{x}_t^-} x~t−:直接根据上一时刻的状态预测的结果(没有考虑观测信息,先验)
x ~ t \tilde{x}_t x~t:根据观测结果进行优化得到的最优估计值(考虑观测信息,后验)
先验误差: e t − = x t − x ~ t − {e_t^-}=x_t-{\tilde{x}_t^-} et−=xt−x~t−
后验误差: e t = x t − x ~ t e_t=x_t-\tilde{x}_t et=xt−x~t
先验误差协方差矩阵: P t − = E [ e t − ( e t − ) T ] {P_t^-}=E[e_t^-({{e}_t^-)^T}] Pt−=E[et−(et−)T]
后验误差协方差矩阵: P t = E [ e t e t T ] {P_t}=E[e_t{{e}_t^T}] Pt=E[etetT] - 公式推导
- 真实状态空间
状态真实值: x t = F x t − 1 + B u + w t x_t = Fx_{t-1}+Bu+w_t xt=Fxt−1+Bu+wt,其中 p ( W ) ∼ N ( 0 , Q ) , Q = E [ W W T ] p(W)\sim{N(0,Q)}, Q=E[WW^T] p(W)∼N(0,Q),Q=E[WWT]
状态观测值: z t = H x t + v t z_t=Hx_t+v_t zt=Hxt+vt,其中 p ( V ) ∼ N ( 0 , R ) , R = E [ V V T ] p(V)\sim{N(0,R)}, R=E[VV^T] p(V)∼N(0,R),R=E[VVT] - 实际状态空间
直接预测值: x ~ t − = F x ~ t − 1 + B u \tilde{x}_t^-=F\tilde{x}_{t-1}+Bu x~t−=Fx~t−1+Bu
校正后状态: x ~ t = x ~ t − + K t ( z t − H x ~ t − ) \tilde{x}_t=\tilde{x}_t^-+{K_t}(z_t-H\tilde{x}_t^-) x~t=x~t−+Kt(zt−Hx~t−),其中 K t ( z t − H x ~ t − ) {K_t}(z_t-H\tilde{x}_t^-) Kt(zt−Hx~t−)表示对预测值的修正
寻找 K t K_t Kt使 x ~ t \tilde{x}_t x~t尽可能接近 x t x_t xt,即使后验误差 e t = x t − x ~ t e_t=x_t-\tilde{x}_t et=xt−x~t最小化。
。。。待敲公式
卡尔曼增益:
后验估计:
更新误差协方差:
扩展卡尔曼理解参考:卡尔曼滤波器之扩展卡尔曼滤波
相关文章:

记录:卡尔曼滤波推导
参考:古月居-卡尔曼滤波 一、高斯分布(Gaussian Distribution) 一维高斯分布:随机变量 X X X服从数学期望 μ \mu μ、方差 σ 2 \sigma^2 σ2的正态分布,概率密度函数为 p ( x ) p(x) p(x)。 X ∼ N ( μ , σ 2 )…...

AI游戏外挂为何违法?
尊敬的读者们,大家好!今天我想和大家探讨一个备受争议的话题——AI游戏外挂的合法性。近年来,随着人工智能技术的飞速发展,AI外挂逐渐成为游戏领域的一大毒瘤。那么,为什么AI游戏外挂会被视为违法行为呢?本…...

UVa1006/LA2238 Fixed Partition Memory Management
UVa1006/LA2238 Fixed Partition Memory Management 题目链接题意输入格式输出格式 分析AC 代码 题目链接 本题是2001年icpc世界总决赛的G题 题意 早期的多程序操作系统常把所有的可用内存划分成一些大小固定的区域,不同的区域一般大小不同,而所有区域的…...

Autosar架构
蓝框那种叫component,绿框的叫function cluster。 接口 有三种接口,RTE跟SWC之间链接的叫Autosar Interface,RTE跟BSW的Components链接是Standardized Interface,RTE跟BSW的services链接的是Standardized Autosar Interface。 St…...

Java 异常介绍
在Java中,异常(Exception)是程序在运行时遇到的问题或错误的表示。异常可以是由程序错误、非法操作、资源不足或其他意外情况引起的。Java异常分为两类:受检异常(Checked Exception)和未检查异常(Unchecked Exception)。 受检异常(Checked Exception): 受检异常是编…...

vulhub靶机struts2环境下的s2-032(CVE-2016-3081)(远程命令执行漏洞)
影响范围 Struts 2.3.19至2.3.20.2、2.3.21至2.3.24.1和2.3.25至2.3.28 当用户提交表单数据并验证失败时,后端会将用户之前提交的参数值使用OGNL表达式%{value}进行解析,然后重新填充到对应的表单数据中。 漏洞搭建 没有特殊要求,请看 (3…...

Kubernetes之Headless Services
Kubernetes中的Headless Services(无头服务)是一种特殊类型的服务(Service)定义,它不提供传统意义上的负载均衡和集群IP地址分配。在无头服务中,spec.clusterIP 字段被显式设置为None ,Kubernet…...

银行监管报送系统系列介绍(十七):一表通2.0
国家金融监督管理总局于9月发布了【一表通2.0(试用版)】(简称:一表通2.0),在原试点报送范围的基础上扩大了试点报送区域,意味着将陆续扩大试报送机构范围,推进的速度已明显加快。尽早…...
网络安全之OSPF进阶
该文针对OSPF进行一个全面的认识。建议了解OSPF的基础后进行本文的一个阅读能较好理解本文。 OSPF基础的内容请查看:网络安全之动态路由OSPF基础-CSDN博客 OSPF中更新方式中的触发更新30分钟的链路状态刷新。是因为其算法决定的,距离矢量型协议是边算边…...
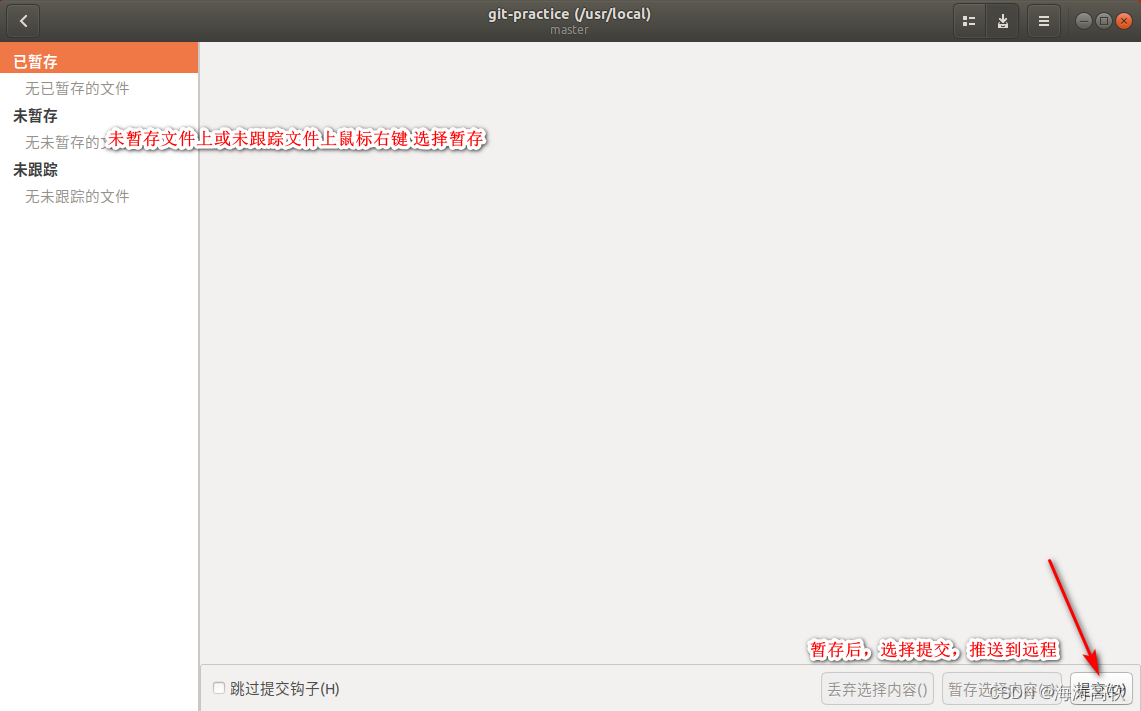
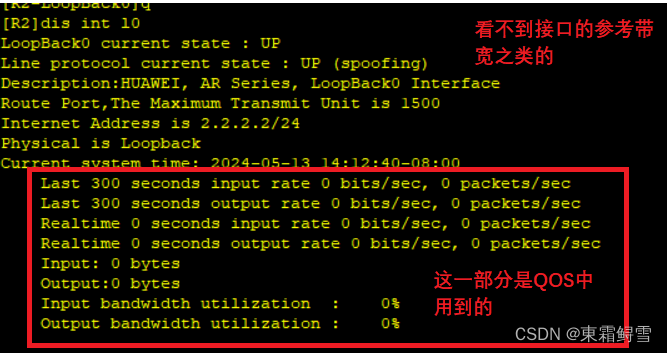
Ubuntu虚拟机上推荐一款免费好用的git版本管理工具
工具叫: gitg 软件界面如下: FR:徐海涛(hunkxu)...
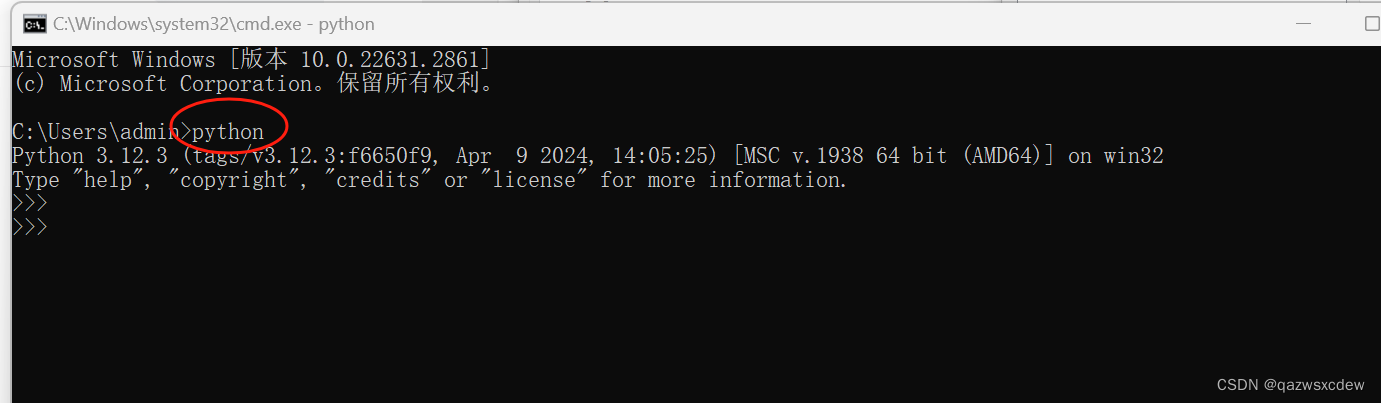
python下载及安装
1、python下载地址: Python Releases for Windows | Python.orgThe official home of the Python Programming Languagehttps://www.python.org/downloads/windows/ 2、python安装 (1) 直接点击下载后的可执行文件.exe (2&…...
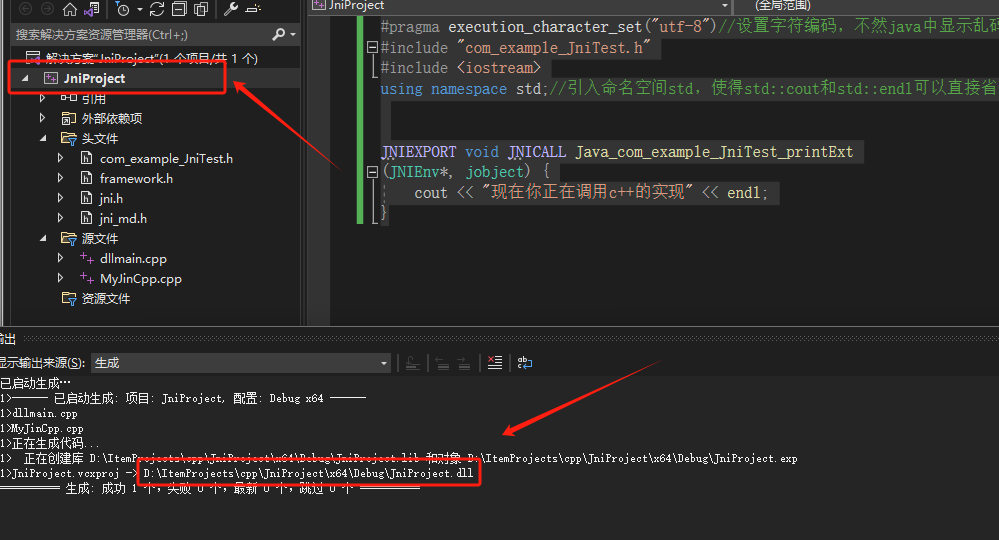
visual studio2022 JNI极简开发流程
文章目录 1 创建java类2 生成JNI头文件3 使用visual studio2022创建DLL项目3.1 选择模板中(Windows桌面向导)3.2 为项目命名3.3 选择应用程序类型为动态链接库3.4 项目概览 4 导入需要的头文件4.1 导入需要的头文件4.2 修改头文件 5 编写C实现6 生成dll文…...
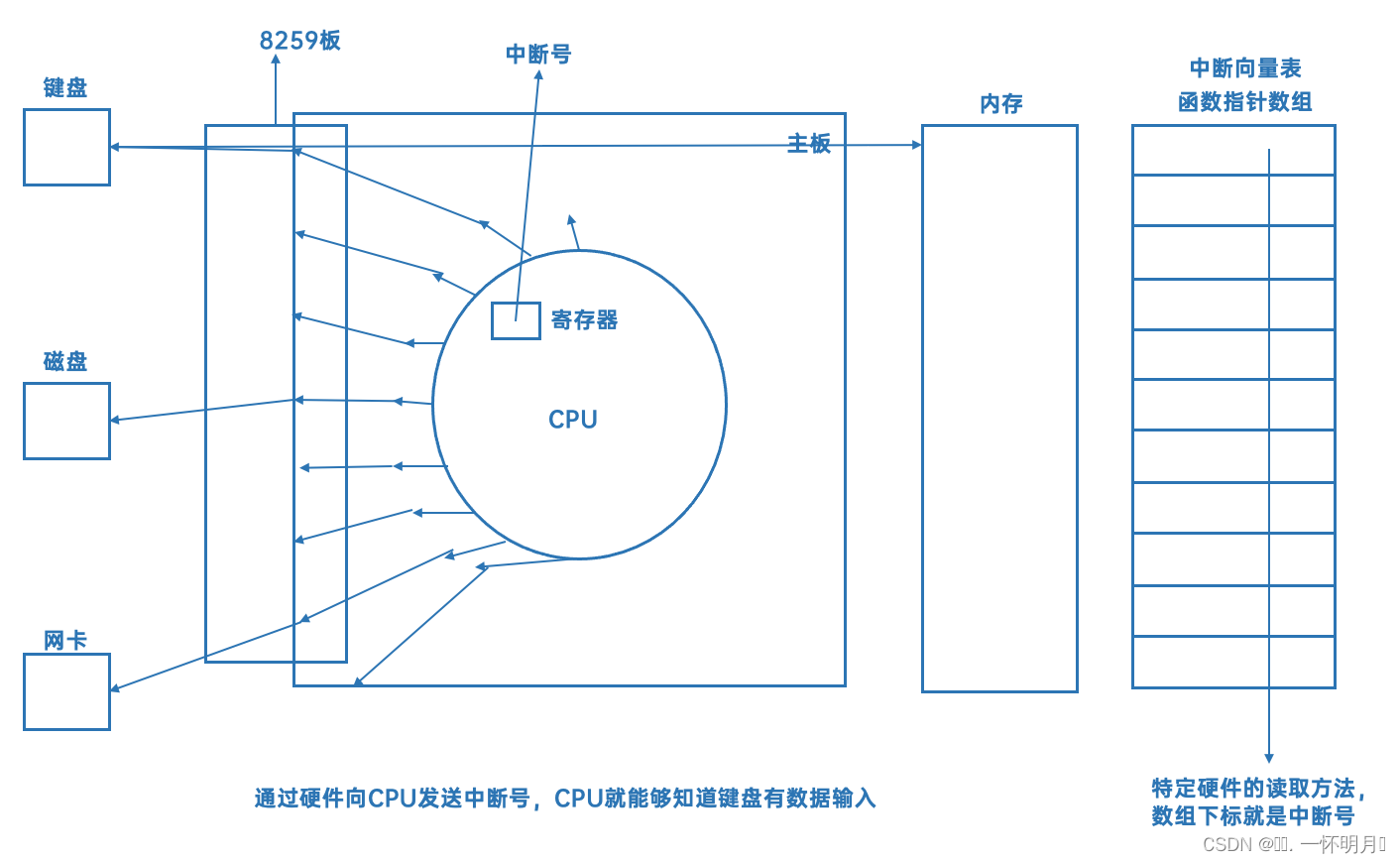
Linux 第三十章
🐶博主主页:ᰔᩚ. 一怀明月ꦿ ❤️🔥专栏系列:线性代数,C初学者入门训练,题解C,C的使用文章,「初学」C,linux 🔥座右铭:“不要等到什么都没有了…...
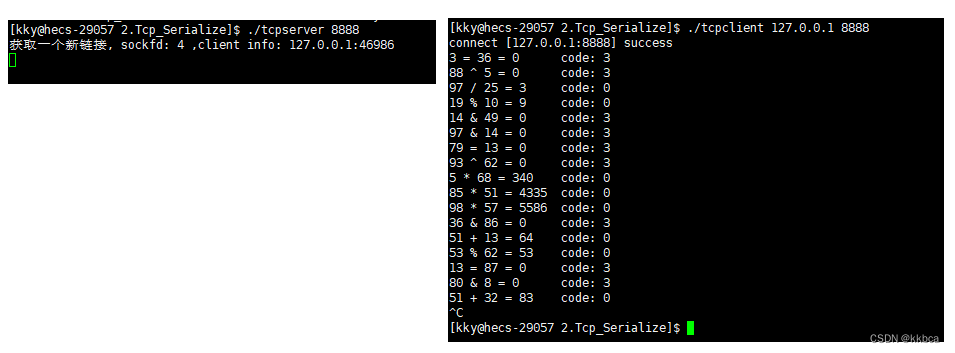
Linux网络——自定义序列化与反序列化
前言 之前我们学习过socket之tcp通信,知道了使用tcp建立连接的一系列操作,并通过write与read函数能让客户端与服务端进行通信,但是tcp是面向字节流的,有可能我们write时只写入了部分数据,此时另一端就来read了&#x…...

大模型介绍
大模型通常指的是参数量超过亿级别,甚至千亿级别的深度学习模型。这类模型能够处理更加复杂的任务,并在各项基准测试中取得了优异的成绩。大模型在自然语言处理、计算机视觉、推荐系统等领域都取得了显著的成果。 大模型的主要优势在于其强大的表征能力&…...

【思维】根号分治
写在前面的话: 个人理解 根号分治本身就是一种卡着评测机过题的做法,所以非必要不要写 #define int long long !!! 本篇博客参考:暴力美学——浅谈根号分治 做到过两三题根号分治了,来总结一下…...

Linux线程(三)死锁与线程同步
目录 一、什么是死锁 死锁的四个必要条件 如何避免死锁 避免死锁算法 二、Linux线程同步 三 、条件变量 1、条件变量基本原理 2、条件变量的使用 3、条件变量使用示例 为什么 pthread_cond_wait 需要互斥量? 一、什么是死锁 死锁是计算机科学中的一个概念,…...
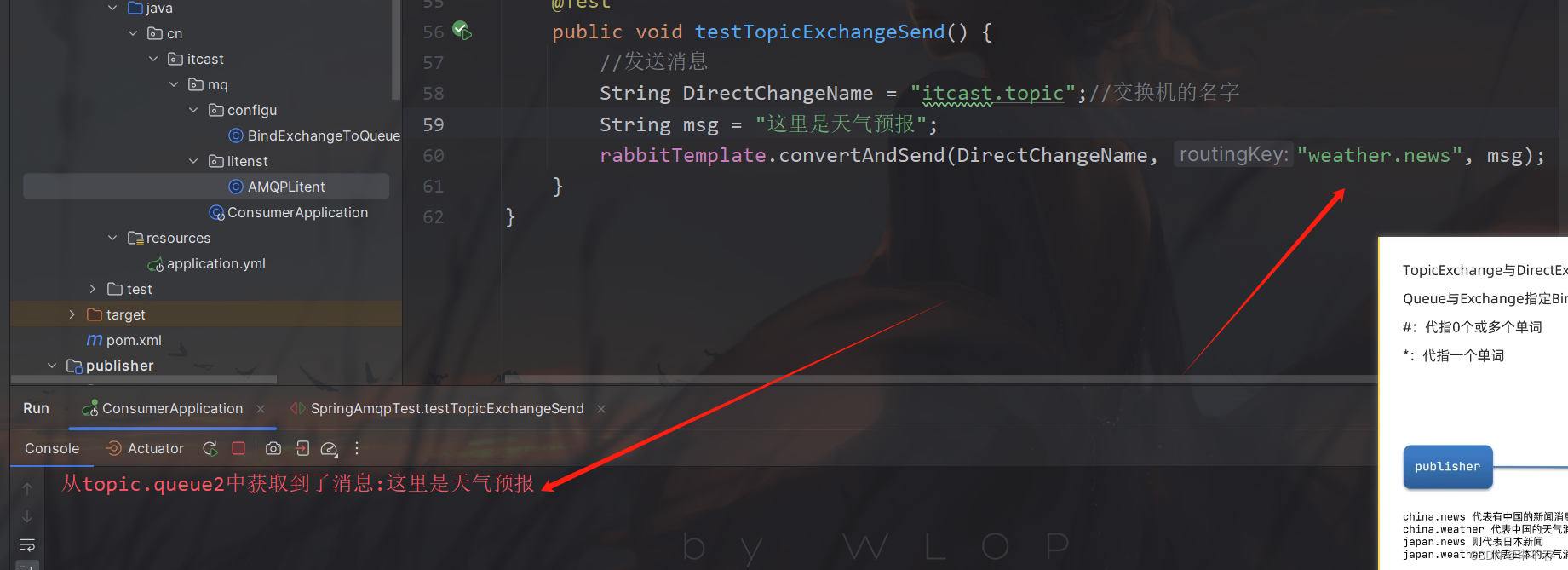
SpringAMQP 发布订阅-TopicExchange
根据这个模型编写代码: RabbitListener(bindings QueueBinding(value Queue(name "topic.queue1"),exchange Exchange(name "itcast.topic",type ExchangeTypes.TOPIC),key {"china.#"}))public void listenTopicQueue1(String msg){Syst…...

uniapp h5 配置代理服务器
"devServer": {"disableHostCheck": true,"proxy": {"/api": {// 需要被代理的后台地址"target": "http://自己的地址","changeOrigin": true,"secure": false,"pathRewrite": {&q…...

使用Apache Spark从MySQL到Kafka再到HDFS的数据转移
使用Apache Spark从MySQL到Kafka再到HDFS的数据转移 在本文中,将介绍如何构建一个实时数据pipeline,从MySQL数据库读取数据,通过Kafka传输数据,最终将数据存储到HDFS中。我们将使用Apache Spark的结构化流处理和流处理功能&#…...

抖音下载神器:免费批量下载抖音视频、图集、音乐和直播回放完整指南
抖音下载神器:免费批量下载抖音视频、图集、音乐和直播回放完整指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser f…...

DeepSeek-V4 详细解读
一、核心突破与整体定位 DeepSeek-V4 是 2026 年 4 月发布的新一代开源大模型,核心目标是解决长上下文的工程化落地难题,通过架构、训练和推理的全栈优化,实现了 "百万上下文能用、好用、日常用"。 整体技术路线 DeepSeek-V4 基于 "Transformer + DeepSeek…...

从塑造品牌形象到沉淀行业公信力软文营销品效合一落地路径及平台选择技巧
当下企业软文营销已经告别只追求表面曝光的初级阶段,进入品牌背书流量曝光线索转化品效合一的成熟时代。单纯追求发稿数量、追求媒体覆盖面,无法为企业带来实际商业价值;只有打通内容传播、品牌信任、受众触达、咨询引流的完整链路,让软文既能塑造品牌形象、沉淀行业公信力,又能…...

《QGIS空间数据处理与高级制图》022:融合后拓扑错误预检查
作者:翰墨之道,毕业于国际知名大学空间信息与计算机专业,获硕士学位,现任国内时空智能领域资深专家、CSDN知名技术博主。多年来深耕地理信息与时空智能核心技术研发,精通 QGIS、GrassGIS、OSG、OsgEarth、UE、Cesium、OpenLayers、Leaflet、MapBox 等主流工具与框架,兼具…...

视频孪生融合落地,无感定位完胜 UWB 静态定位模式
视频孪生融合落地,无感定位完胜 UWB 静态定位模式数字孪生产业加速向实景化、动态化、实景融合方向纵深发展,视频孪生凭借实景画面与虚拟模型共生联动的特性,成为实体场景数字化治理的核心载体。空间定位作为视频孪生的数据根基,直…...

从排名监控到答案诊断:一个算法工程师眼中的GEO工具技术选型标准
本文从工程师视角,剖析生成式搜索优化中的多模型诊断瓶颈,通过异步调度架构与沙盒隔离策略,实现品牌提及率的精准监控与算力可控消耗,为GEO工具选型提供技术验证依据。 传统监控工具在生成式搜索场景面临三重策略瓶颈:…...

大龄大专转行网安实录 8 条干货经验少走弯路
网络安全行业 “人才缺口 300 万 、平均年薪超 25 万” 的红利,让无数职场人动了转行心思。尤其是学历普通(如大专)的群体,既面临原有岗位的天花板,又渴望通过技术转型实现薪资跃迁。但网安行业看似门槛低,…...

Spek音频频谱分析器:如何免费快速可视化音频频率的秘密世界
Spek音频频谱分析器:如何免费快速可视化音频频率的秘密世界 【免费下载链接】spek Acoustic spectrum analyser 项目地址: https://gitcode.com/gh_mirrors/sp/spek Spek是一款功能强大的开源音频频谱分析工具,能够将复杂的音频信号转换为直观的彩…...

RAG+Agent+记忆图谱三重架构解析,2026年仅剩这4个工具通过企业级安全审计认证
更多请点击: https://codechina.net 第一章:RAGAgent记忆图谱三重架构解析,2026年仅剩这4个工具通过企业级安全审计认证 架构协同的本质逻辑 RAG 提供实时、可溯源的外部知识注入能力;Agent 负责任务分解、工具调用与多步推理闭…...

trae 提示 测到模型循环,请求已被中断。请重试或新建任务。怎么处理?
这个提示是 Trae 的防死循环保护机制,核心原因是:模型陷入了「重复执行无效操作 → 无法推进任务 → 又重复执行」的循环,系统主动中断请求,避免资源浪费和任务卡死。下面给你拆解常见原因和对应的解决办法,按从高到低…...