多帧激光点云基于标定参数进行融合拼接
1、前言
在三维视觉技术蓬勃发展的今天,点云作为捕获和表示三维环境的基础数据形式,扮演着至关重要的角色。点云融合拼接技术,作为连接孤立点云片段、构建连续、全面三维场景的核心过程,对于自动驾驶、机器人导航、三维建模以及地理信息系统等领域具有重要意义。在自动实际应用中,为了获得一个的360度的三维点云,我们可能会安装主雷达加补盲雷达,在不同的视点进行数据采集,然后将这些采集到的点云数据拼接到一起。
2、将标定参数转换成转换矩阵
print("transform")
base2left= np.eye(4)
base2left[:3, :3] = pcd_left.get_rotation_matrix_from_xyz((0, -0, 0.9404))
base2left[0, 3] = 7.4
base2left[1, 3] = 1.838
base2left[2, 3] = 0.7323print(base2left)base2right = np.eye(4)
base2right[:3, :3] = pcd_right.get_rotation_matrix_from_xyz((-0.0234488, 0.0245959, -0.76741))
base2right[0, 3] = 7.41104
base2right[1, 3] = -1.85054
base2right[2, 3] = 0.734409print(base2right)base2top = np.eye(4)
base2top[:3, :3] = pcd_top.get_rotation_matrix_from_xyz((0.0345518, 0.0744975, -3.12372))
base2top[0, 3] = 1.48886
base2top[1, 3] = -0.0218449
base2top[2, 3] = 0.804177print(base2top)3、将点云进行拼接融合
left_add_col = np.ones((len(pcd_left), 1))left_points_1 = np.hstack([pcd_left, left_add_col])pcd_left_base = np.array([ [ 0.58946495, -0.80779395, 0., 7.4 ],[ 0.80779395, 0.58946495, 0., 1.838 ],[ 0. , 0. , 1. , 0.7323 ],[ 0. , 0. , 0. , 1. ]])left_points_trans = np.dot(pcd_left_base, left_points_1.T).Tleft_points_trans[:,-1] = left_intensity.flatten()right_add_col = np.ones((len(pcd_right), 1))right_points_1 = np.hstack([pcd_right, right_add_col])pcd_right_base = np.array([[ 7.19493563e-01, 6.94063525e-01, 2.45934202e-02, 7.41104000e+00],[-6.94497664e-01, 7.19113053e-01, 2.34395594e-02, -1.85054000e+00],[-1.41690622e-03, -3.39446850e-02, 9.99422709e-01, 7.34409000e-01],[ 0.00000000e+00, 0.00000000e+00, 0.00000000e+00, 1.00000000e+00]])right_points_trans = np.dot(pcd_right_base, right_points_1.T).Tright_points_trans[:,-1] = right_intensity.flatten()top_add_col = np.ones((len(pcd_top), 1))top_points_1 = np.hstack([pcd_top, top_add_col])pcd_top_base = np.array([ [-0.99706708, 0.01782213, 0.07442861, -1.48886 ],[-0.02043176, -0.99919758, -0.03444911, -0.0218449 ],[ 0.07375493, -0.03586878, 0.99663115, 0.804177 ],[ 0., 0., 0., 1. ]])top_points_trans = np.dot(pcd_top_base, top_points_1.T).Ttop_points_trans[:,-1] = top_intensity.flatten()fuson_points = np.vstack([left_points_trans, right_points_trans, top_points_trans])相关文章:

多帧激光点云基于标定参数进行融合拼接
1、前言 在三维视觉技术蓬勃发展的今天,点云作为捕获和表示三维环境的基础数据形式,扮演着至关重要的角色。点云融合拼接技术,作为连接孤立点云片段、构建连续、全面三维场景的核心过程,对于自动驾驶、机器人导航、三维建模以及地…...

python数据类型之字符串
目录 1.字符串概念和注意事项 2.字符串内置函数 3.字符串的索引、切片和遍历 4.字符串运算符 5.字符串常用方法 性质判断 开头结尾判断 是否存在某个子串 大小写等格式转化 子串替换 删除两端空白字符 格式化字符串 分割与合并 6.字符串模板 7.exec 函数 8.字符…...

Vue3实战笔记(38)—粒子特效终章
文章目录 前言一、怎样使用官方提供的特效二、海葵特效总结 前言 官方还有很多漂亮的特效,但是vue3只有一个demo,例如我前面实现的两个页面就耗费了一些时间,今天记录一下tsparticles官方内置的几个特效的使用方法,一般这几个就足…...
晶体振荡器
一、晶振与晶体区别 晶振是有源晶振的简称,又叫振荡器,英文名称是oscillator,内部有时钟电路,只需供电便可产生振荡信号;晶体是无源晶振的简称,也叫谐振器,英文名称是crystal,是无极…...
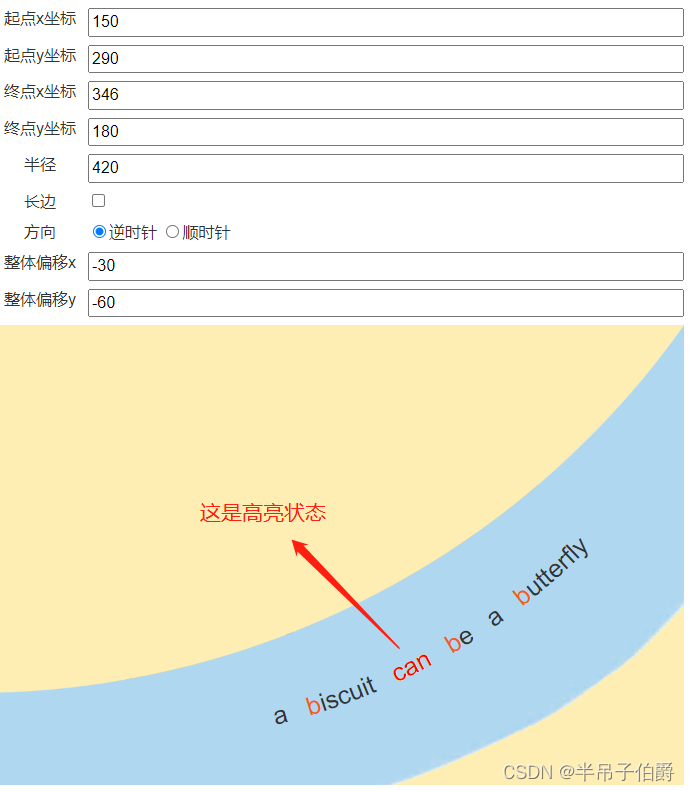
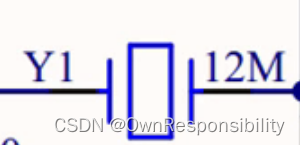
单词可交互的弧形文本
在一个项目中,要求把少儿读本做成电子教材呈现出来,电子书的排版要求跟纸质书一致。其中,英语书有个需求:书中有些不规则排版的文本(如下图所示),当随书音频播放时,被读到的文本要求…...
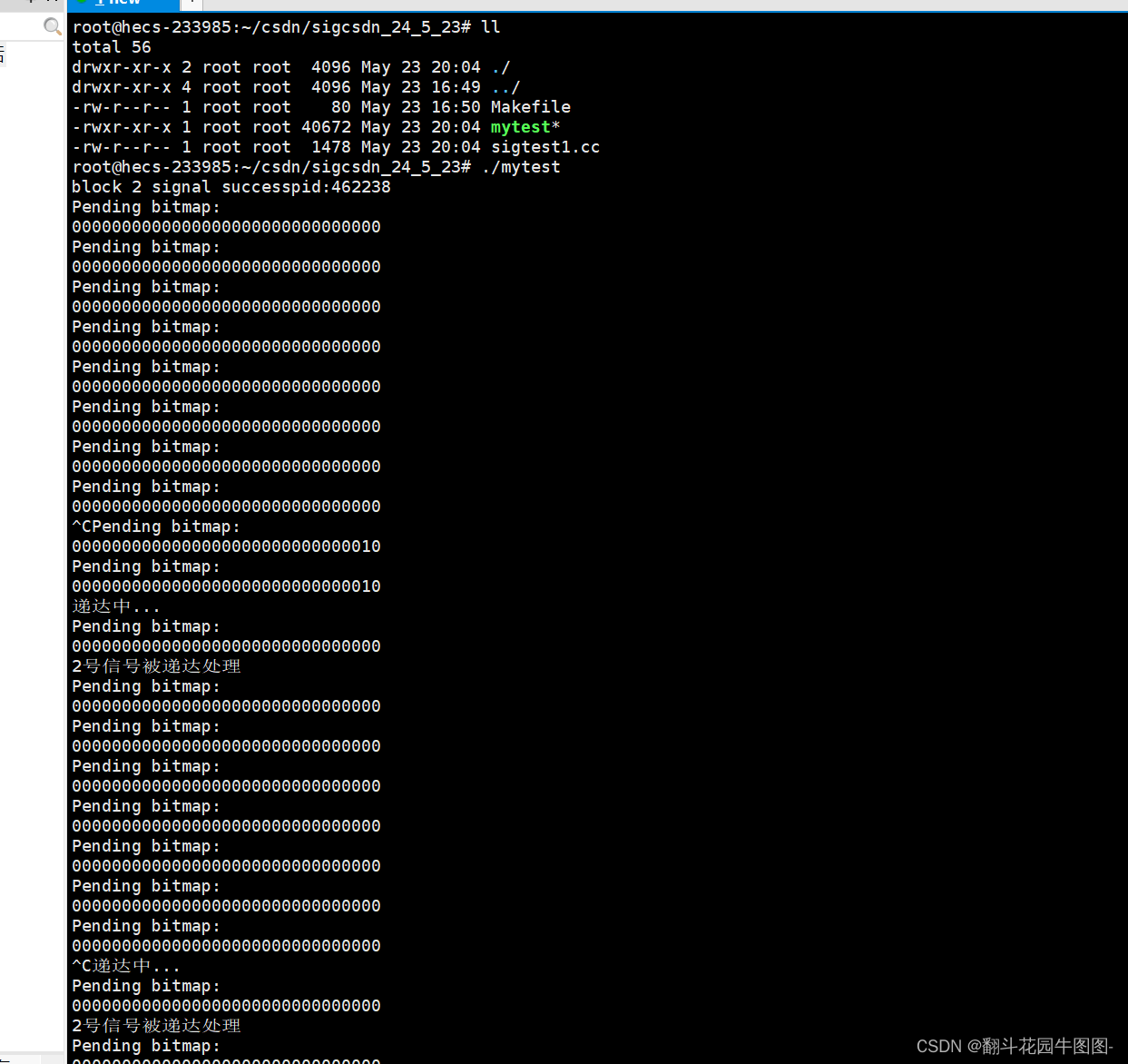
Linux——进程信号(一)
1.信号入门 1.1生活中的信号 什么是信号? 结合实际红绿灯、闹钟、游戏中的"!"等等这些都是信号。 以红绿灯为例子: 一看到红绿灯我们就知道:红灯停、绿灯行;我们不仅知道它是一个红绿灯而且知道当其出现不同的状况…...
)
centos9 stream在线安装NVIDIA驱动(rockylinux9.4也成功安装nvidia驱动)
Install NVIDIA Drivers on CentOS Stream 9(rockylinux9.4成功) 主板为技嘉mz72-hb2 显卡为4090 一.Disable Secure Boot From the BIOS 二.Enabling the EPEL Repository on CentOS Stream 9 1.update the DNF package repository cache sudo dnf …...

springmvc不同格式的参数解析
参数解析 application/x-www-form-urlencoded格式 这种格式就是传统的表单提交格式,就是一个个的键值对,会进行url编码,使用springmvc接收时使用RequestParam来进行接收,与传入的字段一一对应,此时使用的参数处理器是R…...

Unity3D让BoxCollider根据子物体生成自适应大小
系列文章目录 unity工具 文章目录 系列文章目录unity工具 👉前言👉一、编辑器添加👉二、代码动态添加的方法(第一种)👉三、代码动态添加的方法(第二种)👉四、重新设置模型的中心点👉壁纸分享👉…...
WSL 2 installation is incomplete.
使用的wsl2版本很旧,因此需要手动更新。 https://wslstorestorage.blob.core.windows.net/wslblob/wsl_update_x64.msi...
Servlet的request对象
request对象的继承关系 1.HttpServletRequest接口继承了ServletRequest接口,对其父接口进行了扩展,可以处理满足所有http协议的请求 2.HttpServletRequest和ServletRequest都是接口,不能创建对象,因此在tomcat底层定义实现类并创…...

蓝桥杯-合并数列
小明发现有很多方案可以把一个很大的正整数拆成若干正整数的和。他采取了其中两种方案,分别将它们列为两个数组 {a1, a2, …, an} 和 {b1, b2, …, bm}。两个数组的和相同。 定义一次合并操作可以将某数组内相邻的两个数合并为一个新数,新数的值是原来两…...

《web应用技术》第9次课后作业
一、将前面的代码继续完善功能 1、采用XML映射文件的形式来映射sql语句; 2、采用动态sql语句的方式,实现条件查询的分页。 二、学习git的使用。 1、每个小组将自己的项目上传到gitee,学会协作开发; 2、学会从gitee上拉取项目…...
FRAUDARCatchSync算法简介
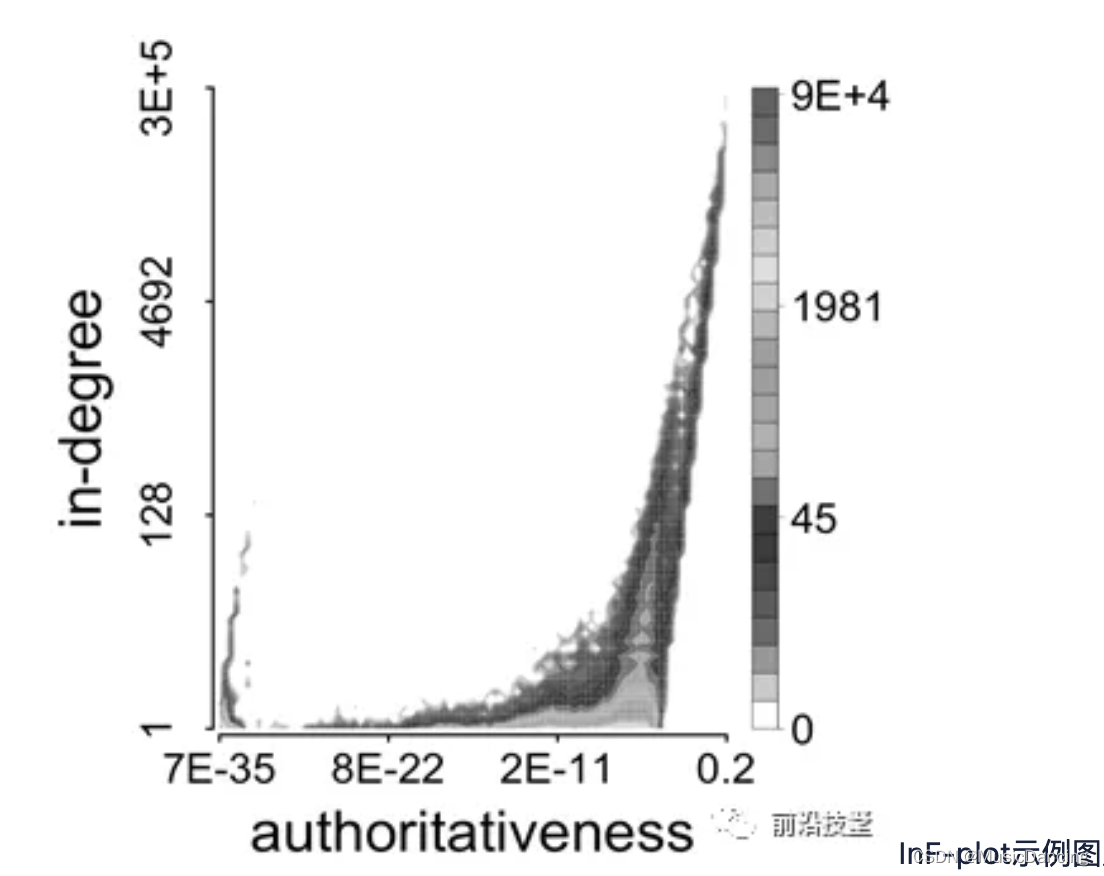
参考:https://blog.51cto.com/u_15127663/2778705 1. 背景 Fraudar 要解决的问题是:找出社交网络中最善于伪装的虚假用户簇。虚假用户会通过增加和正常用户的联系来进行伪装,而这些伪装(边)会形成一个很密集的子网络,可以通过定义…...
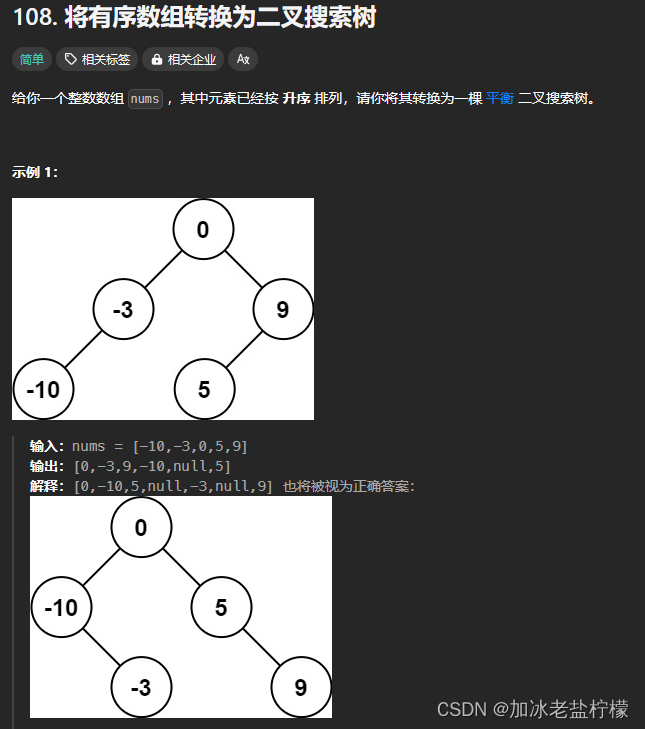
刷题之将有序数组转换成二叉搜索树(leetcode)
将有序数组转换成二叉搜索树 正常递归,中序遍历 递归经常会把自己绕晕,还是得画图分析 /*** Definition for a binary tree node.* struct TreeNode {* int val;* TreeNode *left;* TreeNode *right;* TreeNode() : val(0), left(null…...
)
K-means聚类模型教程(个人总结版)
K-means聚类是一种广泛应用于数据挖掘和数据分析的无监督学习算法。它通过将数据点分成K个簇(cluster),使得同一簇内的数据点之间的相似度最大,不同簇之间的相似度最小。本文将详细介绍K-means聚类算法的背景、基本原理、具体实现…...

android怎么告诉系统不要回收
在Android中,如果你想告诉系统不要回收你的应用程序,可以通过设置Activity的属性来实现。你可以设置android:configChanges属性,指定在哪些配置更改时不重新创建Activity。 例如,如果你想指示系统在屏幕方向更改时不要重新创建Ac…...
)
【FAQ】HarmonyOS SDK 闭源开放能力 —IAP Kit(2)
1.问题描述: 应用内支付IAP Kit和Payment Kit的区别以及适用场景? 解决方案: IAP Kit是四方支付,仅支持在线虚拟商品,如会员,游戏钻石等,双框架支持全球,目前单框架暂时只支持国内…...
ubuntu设置root开机登录,允许root用户ssh远程登录
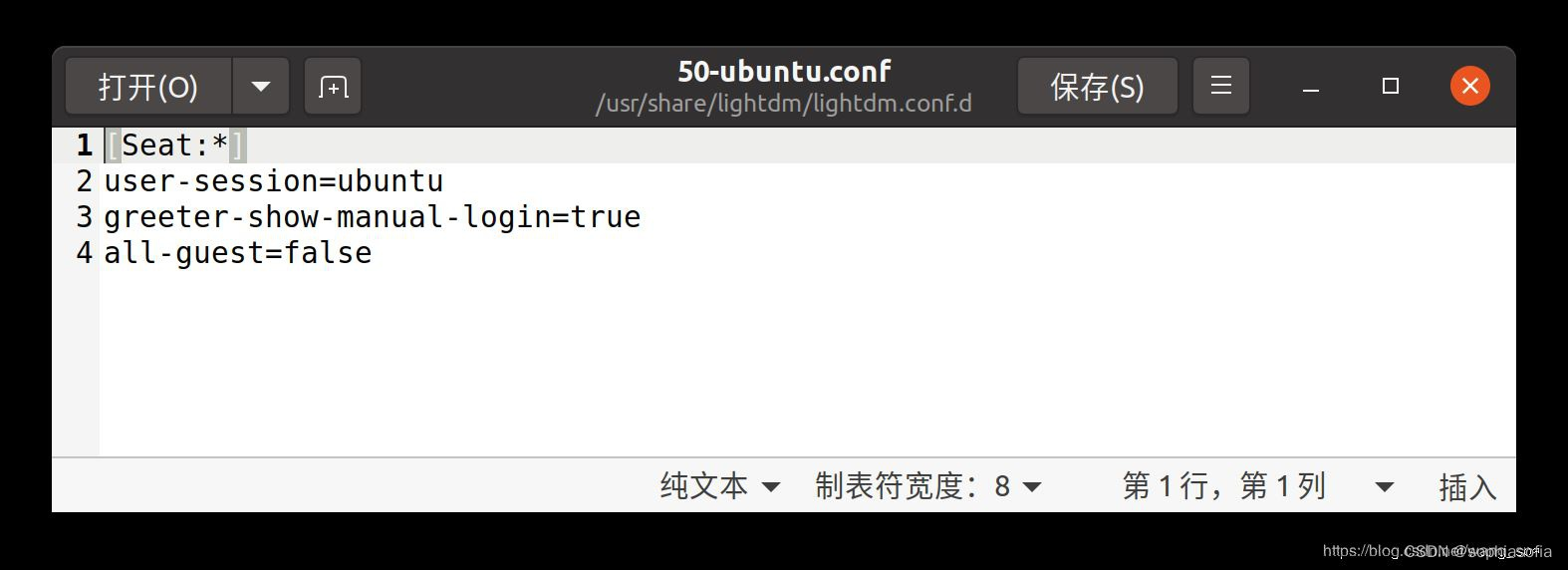
ubuntu与centos系统不同,默认root开机不能登录。 1、输入一下命令创建root密码,根据提示输入新密码 sudo passwd root 2、打开gdm-autologin文件,将auth required pam_succeed_if.so user ! root quiet_success这行注释掉,这行就…...
)
Web测试面试题(二)
一:简述HTTP协议的状态码包含哪些? 2XX,表示成功 3XX,表示重定向 4XX,表示客户端错误 5XX,表示服务器错误 二:HTTP和HTTPS的区别? 《1》安全性上的区别: HTTPS&#x…...

基于Panel与LLM构建智能数据可视化应用的架构与实践
1. 项目概述与核心价值最近在数据可视化与交互应用开发领域,一个名为holoviz-topics/panel-chat-examples的项目仓库引起了我的注意。乍一看,这似乎只是将聊天界面(Chat Interface)与 Panel 这个强大的 Python 交互式仪表盘库结合…...

基于GitHub Actions的自动化代码质量守护:CodeBuddy实战指南
1. 项目概述与核心价值最近在和一些团队做代码评审和协作时,我经常遇到一个痛点:大家写的代码风格各异,注释要么缺失要么过时,一些潜在的安全漏洞和性能问题在提交前很难被系统性地发现。虽然市面上有各种静态分析工具,…...

手把手带你激活Matlab2016b:Windows 64位系统下的完整许可配置指南
1. 准备工作:确保激活环境完整 在开始激活Matlab2016b之前,我们需要做好充分的准备工作。首先确认你已经按照官方流程完成了基础安装,并且安装目录下存在完整的文件结构。我遇到过不少朋友因为安装不完整导致后续激活失败的情况,所…...
:精准匹配V6.6新渲染引擎底层纹理采样逻辑)
【仅剩47份】Midjourney湿版摄影风格训练数据包(含1851–1889年原始湿版扫描图谱×236张+ICC色彩配置文件×5):精准匹配V6.6新渲染引擎底层纹理采样逻辑
更多请点击: https://intelliparadigm.com 第一章:湿版摄影风格的历史溯源与数字再生价值 湿版摄影(Wet Plate Collodion Process)诞生于1851年,由英国科学家弗雷德里克斯科特阿彻(Frederick Scott Archer…...

Arm Neoverse CMN-700缓存一致性互连网络架构解析
1. Arm Neoverse CMN-700架构概述Arm Neoverse CMN-700是Arm公司推出的新一代缓存一致性互连网络(Coherent Mesh Network)解决方案,专为高性能计算、云计算和基础设施应用设计。作为多核处理器系统中实现高效数据共享的关键基础设施ÿ…...

DashClaw:模块化命令行工具的设计哲学与实战应用
1. 项目概述:一个为开发者打造的“瑞士军刀”式命令行工具最近在折腾一个自动化部署脚本时,遇到了一个老生常谈的问题:我需要从一堆杂乱的日志文件里,快速提取出特定时间段的错误信息,同时还要把这些信息按照严重程度分…...

NoC路由设计与缓存一致性协议的协同优化
1. 项目概述:缓存一致性对NoC路由设计的挑战与机遇在当今多核处理器架构中,片上网络(NoC)作为核心间通信的基础设施,其设计质量直接影响整体系统性能。我曾在一次芯片设计项目中深刻体会到,当核心数量增加到64个时,传统…...

2026年冰袋吸水粉厂家大揭秘:选择指南与行业趋势题
随着冷链物流行业的快速发展,冰袋吸水粉作为冷链运输中不可或缺的保冷材料,其市场需求持续增长。然而,市场上冰袋吸水粉的质量参差不齐,如何选择一家值得信赖的厂家成为许多采购商关注的重点。本文将从行业背景、技术特点及市场趋…...

别再用游戏卡炼丹了!手把手教你给台式机装上Tesla P4/P40,搞定Ubuntu 20.04深度学习环境
低成本打造专业级AI工作站:Tesla P4/P40在Ubuntu 20.04的完整实战指南 当你在二手市场以不到2000元的价格淘到一张Tesla P40时,可能会被它12GB GDDR5显存和3840个CUDA核心的参数所吸引——这相当于RTX 2080 Ti约70%的性能,价格却只有其三分之…...

基于WebRTC的P2P远程控制工具vibe-remote部署与实战
1. 项目概述:一个远程控制的开源解决方案最近在折腾智能家居和远程设备管理,发现很多场景下,我们需要的并不是一个功能大而全的远程桌面软件,而是一个轻量、快速、能穿透内网的远程控制工具。比如,家里的NAS需要临时重…...