3D工业视觉
前言
本文主要介绍3D视觉技术、工业领域的应用、市场格局等,主要技术包括激光三角测量、结构光、ToF、立体视觉。

一、核心内容
3D视觉技术满足工业领域更高精度、更高速度、更柔性化的需求,扩大工业自动化的场景。
- 2D视觉技术基于物体平面轮廓,无法获得曲度、空间坐标等三维参数,检验精度低。
- 激光三角测量、结构光、 ToF、多目视觉等技术共同推动了3D视觉发展。
- 生产线在线检测和装配难,需要复杂的解决方案来适应不同的生产场景,并在振动和环境光干扰下实现高速度和高精度,主要技术是激光三角测量和结构光。
- 高精度缺陷检测场景技术要求高,主要采用激光三角测量、干涉和共聚焦技术;
- 仓库自动化(尺寸测量、环境感知、手势识别、随机拣箱)主要采用结构光和立体视觉。
移动机器人视觉引导是一个前景的场景,主要技术包括结构光、ToF、立体视觉。
- 环境感知具备宽视场、 高速度(用于实时视觉伺服)、高精度的要求,技术路径尚未确定。
- 特斯拉Optimus的3D传感模块以多目视觉为主,全身搭载8个摄像头,自研SoC芯片FSD,纯视觉方案硬件成本低,对软件算法要求高。
- 国内外其余厂商多采用3D相机+激光雷达方案,优必选WALKERX的视觉模块采用多目视觉,小米CyberOne的Mi-Sense采用iToF+RGB,追觅采用ToF+结构光,智元A1采用RGBD相机。
从深度学习到通用视觉大模型,AI助力机器视觉提升效率,拓展应用场景。
- 过去工业机器视觉主要针对垂直场景的少量数据进行小模型训练,模型处理问题的复杂程度受限。
- 23年4月Meta发布通用图 像分割大模型SAM,视觉大模型赋能3D视觉,可以实现:
- a.大模型在广泛下游场景中具备优势,降低定制化开发成本,提升机器视觉产品毛利率,快速拓展应用场景。
- b.大模型在零样本或少量样本上表现优秀,机器视觉将在这些领域得以拓展,如从代码驱动变为视觉驱动的机器人、流程工业场景。
二、3D视觉技术
2D视觉与3D视觉对比:
2D视觉发展
- 2D视觉技术在工业自动化过程的应用已经超过30年时间,
- 2D视觉基于物体平面轮廓驱动,解决部分二维层面的读条识别、边缘检测等问题,
- 无法获得曲度、空间坐标等三维参数,但可以满足外观检测、识别等应用,但检验精度低。
3D视觉发展
- 3D视觉技术在2014年前后开始兴起, 利用立体摄像、激光雷达等技术准确地完成物体三维信息的采集,
- 对于光照条件、 物体对比度等客观因素适应能力更强,可以实现2D视觉无法实现或者不好实现的功能,
- 例如检测产品的高度、平面度、体积等和三维建模等,
- 更加适配半导体、汽车、3C等领域的高精度工业需求,检测要求精度达到<1μm。
目前3D视觉最有前景的工业应用场景:高精度的测量及缺陷识别、高速高精度的在线检测、自动装配、视觉引导机器人等。
3D视觉常用四种技术:
- 激光三角测量、结构光、飞行时间(ToF)、多目视觉

1)激光三角测量 (Laser Triangulation)
激光三角测量是一种基于三角几何原理的测距技术。其基本原理如下:
- 激光器发射一束激光,照射到目标物体上。
- 激光反射回来,并由一个角度固定的摄像头接收。
- 通过测量激光反射点在摄像头图像中的位置,可以根据已知的几何关系(激光器、摄像头和反射点之间的角度和距离)计算出目标物体的距离。

这种方法通常用于高精度的距离测量,适合于表面较为平整的物体。
2)结构光 (Structured Light)
结构光技术通过投射已知图案(如条纹、网格等)到目标物体表面,并用摄像头拍摄反射图案来测量物体的三维形状。其原理如下:
- 投影设备发射特定结构的光图案到物体表面。
- 光图案在物体表面发生变形,并由摄像头捕捉到。
- 通过分析捕捉到的变形图案,可以重建物体的三维形状。
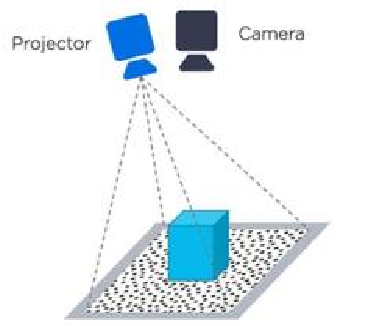
结构光适用于获取复杂物体表面的高分辨率三维图像。
3)飞行时间 (ToF, Time of Flight)
飞行时间技术通过测量光信号从发射到返回所需的时间来计算距离。其原理如下:
- 光源发射短脉冲光信号(通常是激光或红外光)。
- 光信号遇到目标物体后反射回来。
- 通过测量光信号从发射到接收的时间差,并结合光速,可以计算出目标物体的距离。
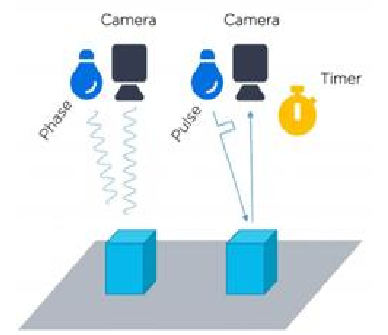
ToF技术能够快速获取物体的距离信息,适合于实时性要求高的应用场景。
4)多目视觉 (Multi-view Stereo)
多目视觉是一种利用多个摄像头从不同角度拍摄同一场景,并通过图像处理算法重建场景的三维信息的技术。其原理如下:
- 多个摄像头从不同角度同时拍摄目标物体或场景。
- 通过图像配准和匹配算法,确定各摄像头拍摄的图像中相同点的对应关系。
- 利用几何方法(如三角测量),计算出对应点的三维坐标,进而重建出整个场景的三维模型。
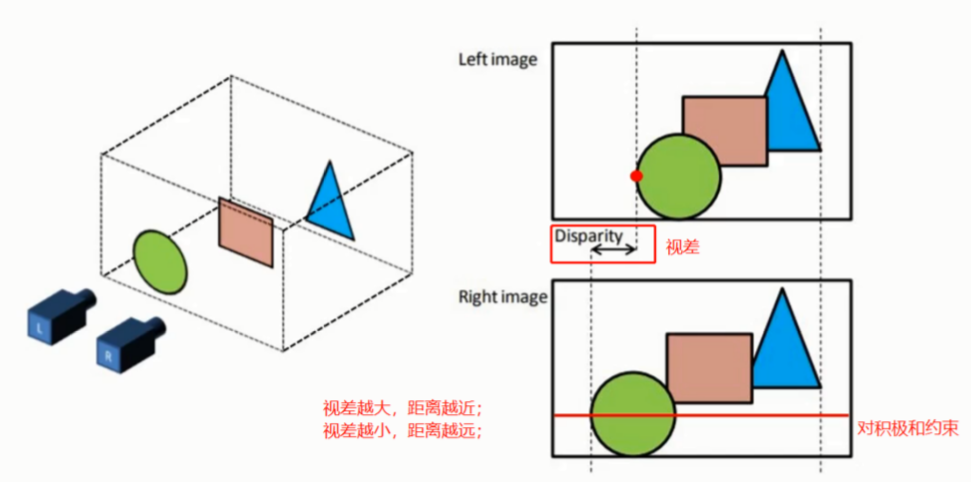
多目视觉适用于大范围场景的三维重建,广泛应用于摄影测量、机器人导航等领域。
3D视觉检测方法性能对比

3D视觉在工业的应用:

三、3D视觉市场格局
主要机器视觉厂商,产业链布局情况对比 :


国内外机器视觉厂商,零部件核心技术指标比较:

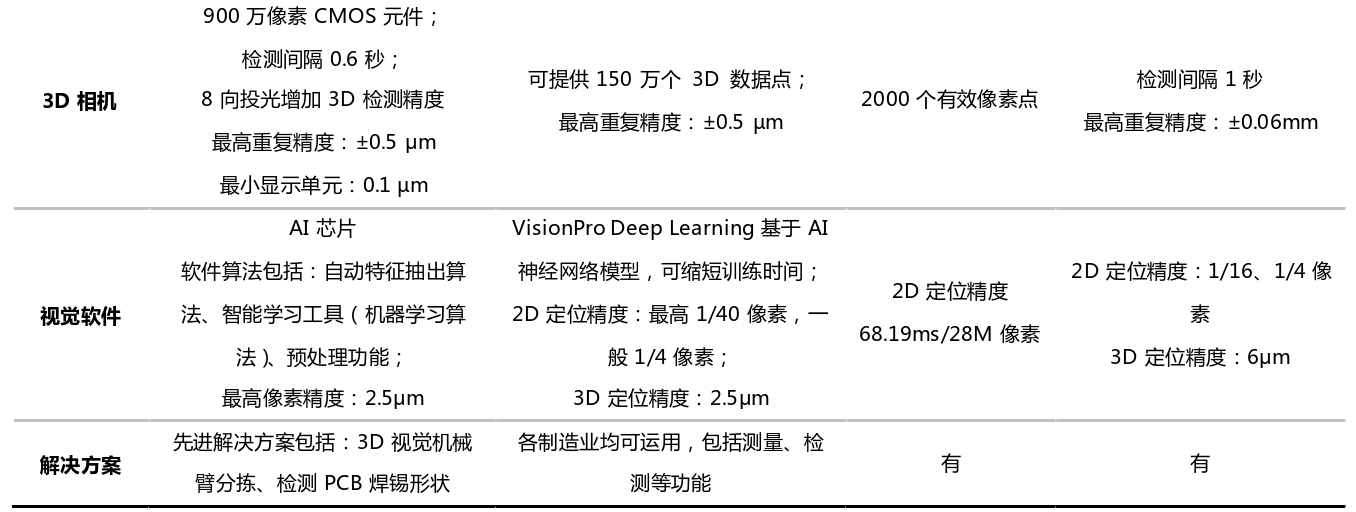
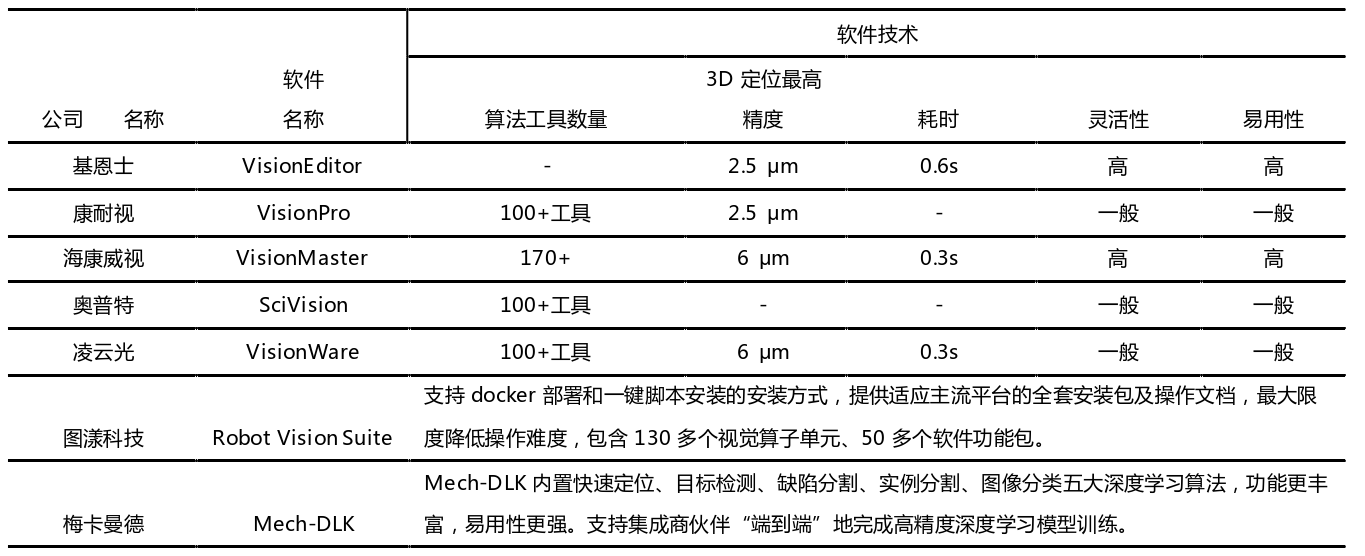
各公司视觉软件对比,基恩士3D精度最高:
国内主要视觉引导机器人厂商:
| 公司 | 简介 |
| 海康机器人 | 面向全球的移动机器人、机器视觉产品提供商。 |
| 梅卡曼德 | 已形成包括 Mech-Eye 工业级 3D 相机、Mech-Vision 图形化机器视觉软件、Mech-Viz 机器人智能编程环境等在内的智能机器人基础设施产品线,可应用于无序抓取、高精度定位、装配、工业检测/测量、自动生成轨迹等典型场景。 |
| 图漾科技 | 全球领先的 3D 机器视觉供应商,为工业和行业应用提供高性价比的 3D 工业相机和配套软件方案。满足工业自动化、工业测量、物流科技、商业应用和其他多种场景。 |
| 燧智科技 | 公司的激光结构光 3D 相机产品主要应用于智能机器人引导,线光谱共聚焦 3D 成像系统应用于半导体、一、超分辨和共聚焦成像系统应用于生命科学。 |
| 迈德威视 | 专注提供各种工业相机类产品的开发及服务,是一家纯粹的相机硬件供应商,公司产品系列齐全,核心产品包含面阵相机、线阵相机、热成像相机、智能相机、3D 相机、双目相机模组、定制相机整机、摄像头模组等多条产品线。 |
| 知象光电 | 知象光电拥有自主研发的微结构光投射芯片、成像算法芯片、模组和整机,产品体积小、精度高、可靠性高。自研 3D 焊接视觉软件可实现复杂焊缝特征提取、轨迹导入、工件拟定定位等功能,焊接机器人落地生产。 |
| 埃尔森 | 埃尔森为多样化应用场景提供 3D 视觉方案,双目线扫激光 3D 技术应对严酷工作场景,双目面扫光栅 3D 成像技术应用于高精度成像场景,单线激光 3D 成像技术适合动态定位、测量、检测场景等。 |
| 燧智科技 | 面向工艺类场景,切坡口、焊接、上下料推拉流程化解决方案。 |
| 迁移科技 | 专注于 3D 工业相机和 3D 视觉机械臂引导系统,2022 年实现规模化量产。 |
| 如本科技 | 公司的 RVC 3D 工业相机、VDA 视觉位移测量分析系统以及垂直行业手眼配合产品,协同打造先进的机器人智能手眼方案。 |
| 蓝芯科技 | 新一代移动机器人全球引领者和制造业柔性物流解决方案一流提供商,核心技术 LX-MRDVS(蓝芯-移动机器人深度视觉系统)赋予机器人 3D 视觉感知能力。行业聚焦 3C、新能源(光伏/锂电)、包装,合作客户包括华为、中兴、比亚迪、德赛、美的、富士康、SHARP、LG、新能源等。 |
| 灵动科技 | 全球领先的视觉导航移动机器人(AMR)企业,第四代移动机器人(视觉 AMR)的开拓者和引领者,亚洲出货量、市场占率第一的“订单到人”方案商,拥有前瞻性的视觉导航 AMR 和全球领先的集群调度系统,以及全球化的销售、服务和运营能力。灵动科技已为众多世界 500 强头部企业提供服务,包括京东物流、顺丰供应链中国、欧莱雅、TCL、东风乘用车等,并成为华为严选唯一的机器人合作伙伴。 |
| 马路创新 | 多场景机器人大集群方案解决方案商,深耕人工智能大数据、调度算法、控制中枢等专业技术,聚焦搬运、拣选、分拣、智慧仓库、智慧工厂等场景。 |
3D 视觉重工行业应用:

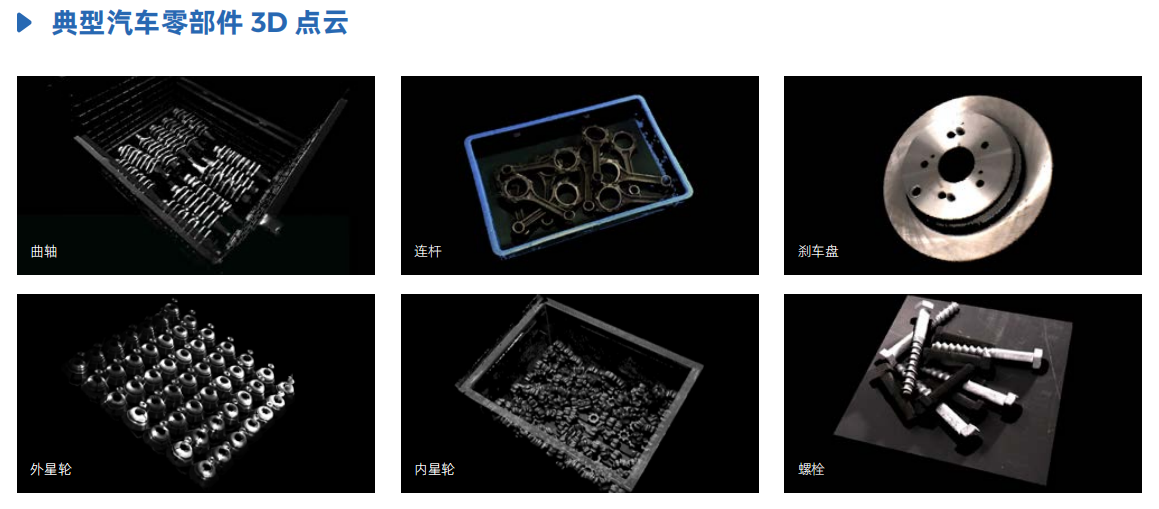
3D 视觉技术应用于汽车生产制造:

汽车零部件厂|视觉引导工件上下料
工件上下料是汽车零部件生产加工的重要环节。汽车零部件加工至成品需经过多道工序流转,催生了大量自动化上下料需求。



后续再更新~
相关文章:
3D工业视觉
前言 本文主要介绍3D视觉技术、工业领域的应用、市场格局等,主要技术包括激光三角测量、结构光、ToF、立体视觉。 一、核心内容 3D视觉技术满足工业领域更高精度、更高速度、更柔性化的需求,扩大工业自动化的场景。 2D视觉技术基于物体平面轮廓&#…...

使用auth_basic模块进行基础认证
在建立和维护Web服务器时,身份认证是一个至关重要的环节。Nginx作为一个高性能的Web服务器,支持许多认证方法,其中较为简单和常用的一种即是基础身份认证(Basic Authentication),这需要借助auth_basic模块实…...
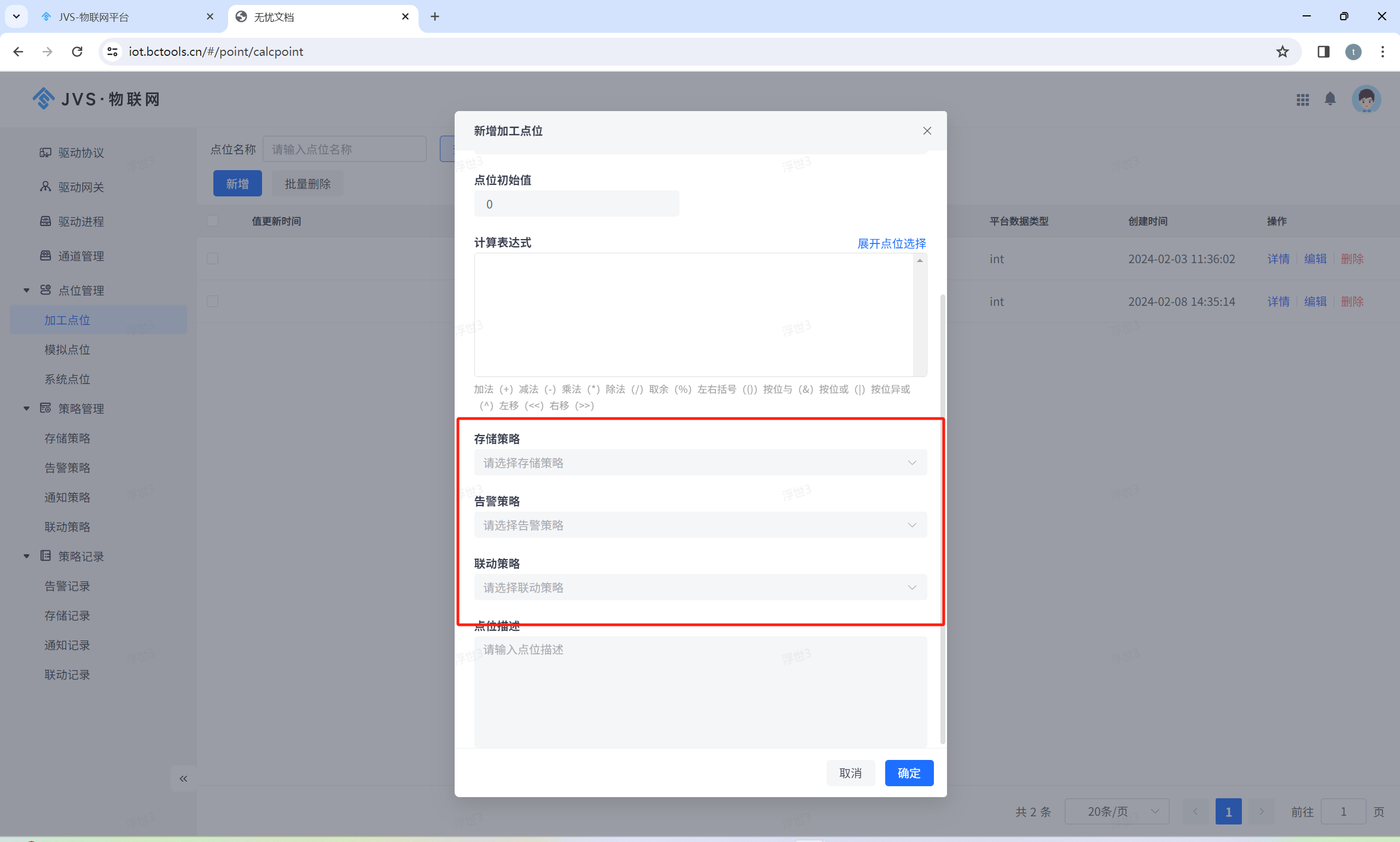
深度解析物联网平台:优化数据点位管理的实战策略
策略管理 策略,作为在物联网平台数据点位创建过程中可设定的规则,涵盖了多个重要方面,策略是在创建点位的时候,可以设置的规则,包括存储策略、告警策略、通知策略以及联动策略。这些策略都是通过专门的列表页面进行集…...

Spring常见问题
如何理解spring属于低侵入式设计? 在代码中不需要写明具体依赖对象,在运行时进行自动注入,降低了组件的耦合依赖的是接口,而接口的实现类具有拓展性 Spring IOC 实现了什么功能,谈谈你对IOC的理解。 负责创建对象&…...

MiniMax Golang2轮面试,期望薪资25K
一面 1、自我介绍 2、简单介绍一下你们成立了这个finance的财务中台之后,整体的服务架构是怎么样的吗? 3、就你提到的预算池项目,展开说说背景,以及解决了怎么样的问题? 4、为什么采用针对T-1订单的异步计算方案&a…...

MyBatis系统学习篇 - MyBatis的缓存
MyBatis的缓存实现原理主要基于三级缓存机制,包括一级缓存(本地缓存)、二级缓存(全局缓存)和三级缓存(跨会话缓存)。这个缓存在我们实际开发中可以避免我们查询重复的数据,在一定程度…...
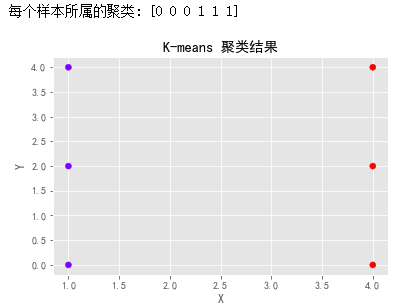
K-means聚类模型
目录 1.定义 2.K-means聚类模型的优点 3.K-means聚类模型的缺点 4.K-means聚类模型的应用场景 5.对K-means聚类模型未来的展望 6.小结 1.定义 什么是 K-means 聚类模型?K-means 聚类模型是一种无监督学习算法,用于将数据划分为不同的组或簇&#…...

免费分享一套微信小程序旅游推荐(智慧旅游)系统(SpringBoot后端+Vue管理端)【论文+源码+SQL脚本】,帅呆了~~
大家好,我是java1234_小锋老师,看到一个不错的微信小程序旅游推荐(智慧旅游)系统(SpringBoot后端Vue管理端)【论文源码SQL脚本】,分享下哈。 项目视频演示 【免费】微信小程序旅游推荐(智慧旅游)系统(SpringBoot后端Vue管理端) Java毕业设计…...

Matlab 2023b学习笔记1——界面认识
下载安装好Matlab后,可以看到如下界面: 可以看到,这时只有命令行窗口。我们在上方工具栏中选择“布局”—— “默认”,即可看到左右两边多出来了“当前文件夹”与“工作区”两栏。 一、当前文件夹界面 这个界面显示的是当前目录下…...

C++ sort排序的总和应用题
第1题 sort排序1 时限:1s 空间:256m 输入n个数,将这n个数从小到大排序,输出。 输入格式 第1行,一个正整数n(n<100) 第2行,n个正整数,小于100 输出格式 n个整…...

[力扣]——231.2的幂
题目描述: 给你一个整数 n,请你判断该整数是否是 2 的幂次方。如果是,返回 true ;否则,返回 false 。 如果存在一个整数 x 使得 n 2x ,则认为 n 是 2 的幂次方。 bool isPowerOfTwo(int n){ if(n0)retur…...

【css】引入背景图时候,路径写入@会报错
看报错信息 我的写法 解决办法 在前面加个~...

【有手就行】使用你自己的声音做语音合成,CPU都能跑,亲测有效
此文介绍在百度飞桨上一个公开的案例,亲测有效。 厌倦了前篇一律的TTS音色了吗?打开短视频听来听去就是那几个声音,快来试试使用你自己的声音来做语音合成吧!本教程非常简单,只需要你能够上传自己的音频数据就可以(建议…...

《ESP8266通信指南》番外-(附完整代码)ESP8266获取DHT11接入(基于Lua)
前言 此篇为番外篇,是 ESP8266 入门的其他功能教程,包括但不限于 DHT11 驱动TCP 通信Thingsboard 平台的接入阿里云物联网云平台接入华为云平台接入 1. 小节目标 使用 Lua 驱动 DHT11 传感器,获取温湿度的值 2. 进入主题 NodeMCU 基于 LUA 相关资料 官方文档:…...
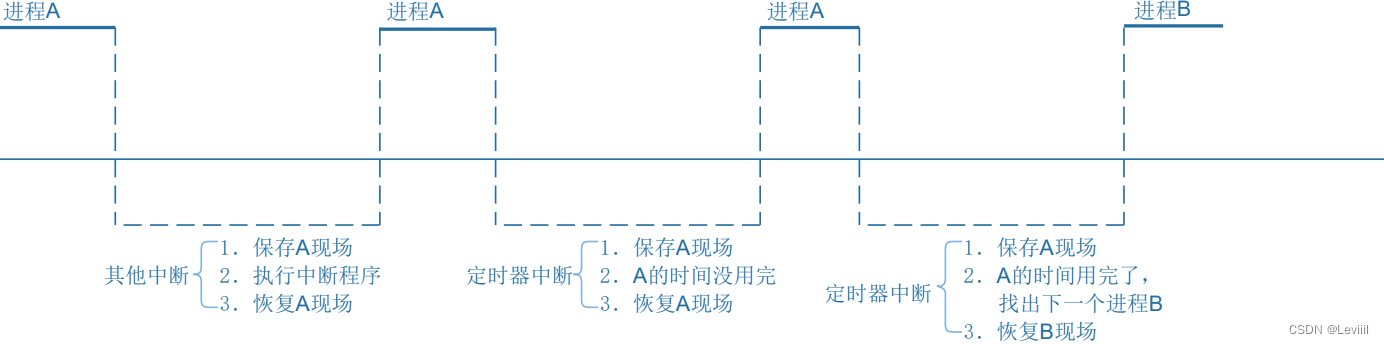
[IMX6ULL驱动开发]-Linux对中断的处理(一)
目录 中断概念的引入 ARM架构中断的流程 异常向量表 Linux系统对中断的处理 ARM对程序和中断的处理 Linux进程中断处理 中断概念的引入 如何理解中断,我们可以进行如下抽象。把CPU看做一个母亲,当它正在执行任务的时候,可以看为是一个母…...
)
PHP基础学习笔记(面向对象OOP)
类和对象 <?php //声明一个名为 Fruit 的类,它包含两个属性($name 和 $color)以及两个用于设置和获取 $name 属性的方法 set_name() 和 get_name(): class Fruit {// Propertiespublic $name;public $color;// Methodsfuncti…...
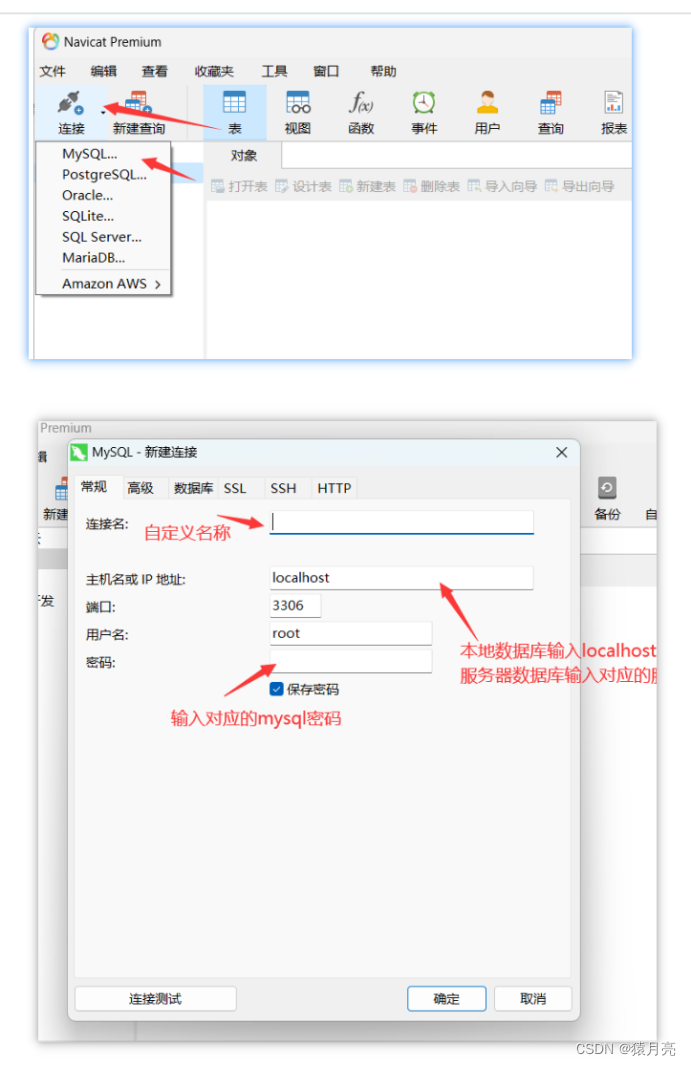
Mysql超详细安装配置教程(保姆级图文)
MySQL是一种流行的开源关系型数据库管理系统,它广泛用于网站和服务的数据存储和管理。MySQL以其高性能、可靠性和易用性而闻名,是许多Web应用程序的首选数据库解决方案之一。 一、下载安装包 (1)从网盘下载安装文件 点击此处直…...
HR招聘测评,如何判断候选人的团队协作能力?
什么是团队协作能力? 团队协作能力,说的是在集体环境中,能同他人协同工作,为追求共同的目标而努力,其中包括沟通,表达,协调,尊重,信任,责任共担等一系列综合…...
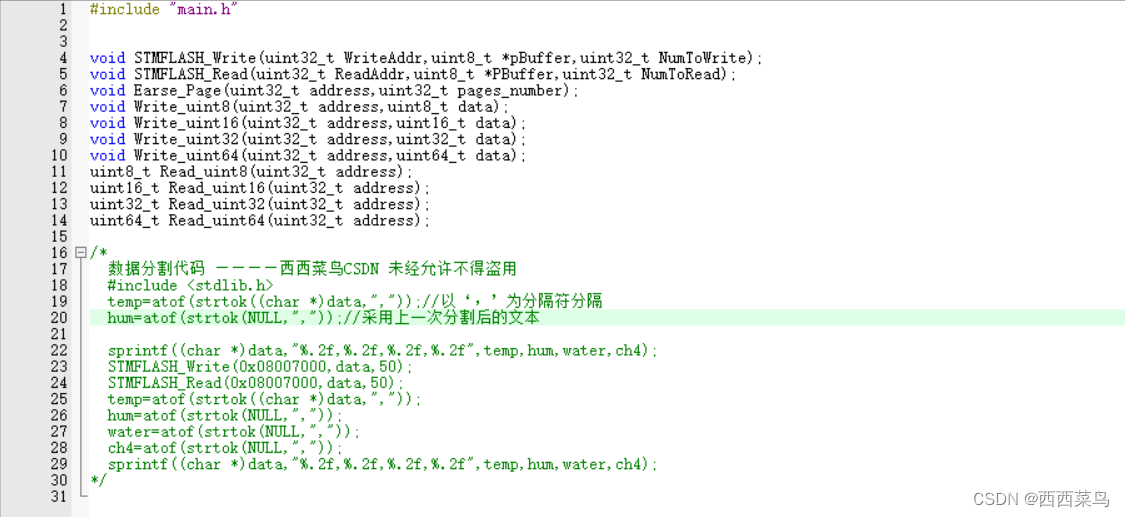
[STM32-HAL库]Flash库-HAL库-复杂数据读写-STM32CUBEMX开发-HAL库开发系列-主控STM32F103C6T6
目录 一、前言 二、实现步骤 1.STM32CUBEMX配置 2.导入Flash库 3.分析地址范围 4.找到可用的地址 5.写入读取普通数据 6.写入读取字符串 6.1 存储相关信息 6.2 存取多个参数 三、总结及源码 一、前言 在面对需要持久化存储的数据时,除了挂载TF卡,我们…...

windows 下访问 csdn 异常问题
windows下访问csdn可能会出现什么 确认是真人 或着直接连接不上的情况, 需要在 C:\Windows\System32\drivers\etc 路径下 hosts文件中添加如下内容 1.180.18.85 blog.csdn.net 如果目录下没有hosts文件就自己建一个...

自动化文件管理:基于Python的网盘批量处理方案
自动化文件管理:基于Python的网盘批量处理方案 【免费下载链接】BaiduPanFilesTransfers 百度网盘批量转存、分享和检测工具 项目地址: https://gitcode.com/gh_mirrors/ba/BaiduPanFilesTransfers 在数字资源日益丰富的时代,百度网盘用户面临着批…...

YOLOv11公共场所吸烟行为目标检测数据集-6496张-smoking-detection-1
YOLOv11公共场所吸烟行为目标检测数据集 📊 数据集基本信息 目标类别: [‘not_smoking’, ‘smoking’]中文类别:[‘不吸烟’, ‘吸烟’]训练集:5644 张验证集:569 张测试集:283 张总计:6496 张…...

手写一个AI代码审查员:Claude Agent SDK + MCP 深度实战
引言2026年5月,Anthropic做了一件意味深长的事:把 Claude Code SDK 改名为 Claude Agent SDK。改名背后是一个判断——这不再是"帮你写代码的工具",而是一个能自主读代码、分析逻辑、修改文件、跑测试、甚至提PR的AI Agent编排框架…...
全拆解)
从扫描底片到AI生成:盐印相风格的5层衰减建模(曝光梯度/卤化银结晶/显影不均/微划痕/纸基透光)全拆解
更多请点击: https://intelliparadigm.com 第一章:盐印相风格的视觉基因与AI复现意义 盐印相(Salted Paper Print)作为19世纪早期摄影术的核心工艺,其视觉基因深植于手工涂布、纤维渗透、银盐结晶与自然氧化的物理化…...

太空算力产业正崛起
未来,渔民只需通过手机App向卫星发起查询,卫星便可借助高光谱相机精准定位金枪鱼位置,再通过在轨“智慧大脑”分析处理,将鱼群坐标、渔具使用建议及销售渠道指导等实用信息,精准传回渔民手中。这一充满“黑科技”色彩的…...

AI编程工具 Codex 入门教程,带你7分钟上手 Codex !
大家好,我是程序员小灰。前一段时间,Anthropic旗下的AI编程工具 Claude Code 火了,小灰也为大家制作了Claude Code 相关的视频教程,得到了很多读者的肯定。尽管Claude Code很强大,但存在一个致命的问题,就是…...

Nodejs开发者三步接入Taotoken,实现异步聊天补全
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Nodejs开发者三步接入Taotoken,实现异步聊天补全 对于使用Node.js进行开发的工程师来说,无论是构建前端应用…...
)
在线课程|基于springboot+vue的在线课程管理系统(源码+数据库+文档)
在线课程管理系统 目录 基于springbootvue的在线课程管理系统 一、前言 二、系统设计 三、系统功能设计 四、数据库设计 五、核心代码 六、论文参考 七、最新计算机毕设选题推荐 八、源码获取: 博主介绍:✌️大厂码农|毕设布道师,…...

Windhawk终极指南:5分钟掌握Windows系统个性化定制
Windhawk终极指南:5分钟掌握Windows系统个性化定制 【免费下载链接】windhawk The customization marketplace for Windows programs: https://windhawk.net/ 项目地址: https://gitcode.com/gh_mirrors/wi/windhawk Windows系统定制一直是许多用户的痛点&am…...

YOLO格式标注避坑指南:用labelImg时,你的classes.txt文件生成对了吗?
YOLO格式标注避坑指南:labelImg中classes.txt的隐藏逻辑与实战解决方案 在计算机视觉项目的实际开发中,数据标注的质量往往直接决定了模型性能的上限。许多团队花费大量时间标注数据后,却在模型训练阶段遭遇"标签ID不匹配"、"…...