STM32——DAC篇(基于f103)
技术笔记!
一、DAC简介(了解)
1.1 DAC概念
传感器信号采集改变电信号,通过ADC转换成单片机可以处理的数字信号,处理后,通过DAC转换成电信号,进而实现对系统的控制。

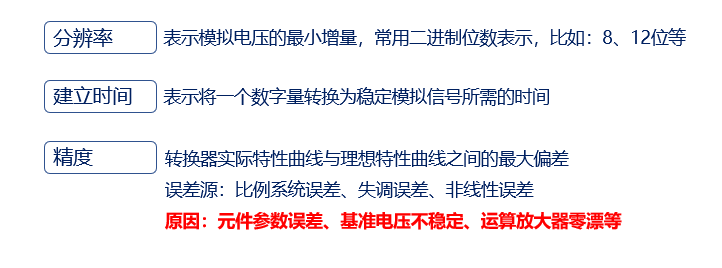
1.2 DAC的特性参数
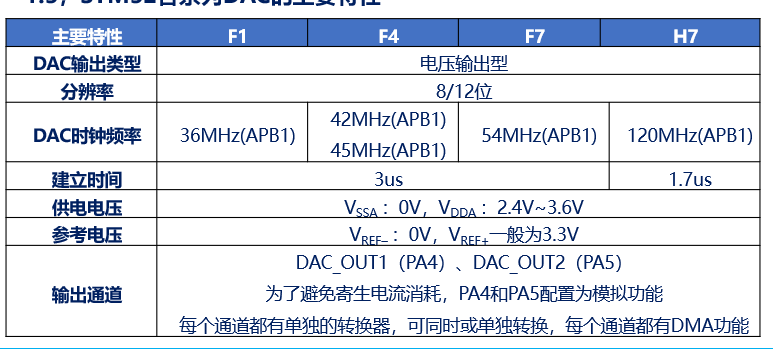
1.3 STM32各系列DAC的主要特性
二、DAC工作原理(掌握)
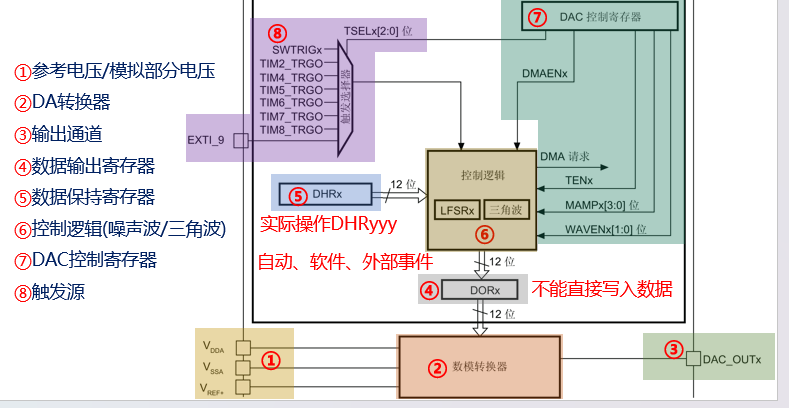
2.1 DAC框图简介
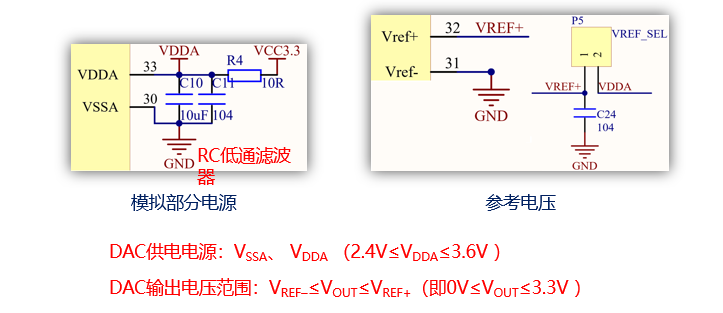
2.2 参考电压/模拟部分电压
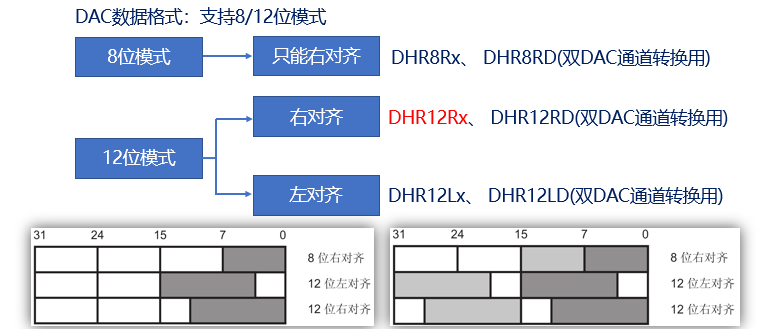
2.3 DAC数据格式
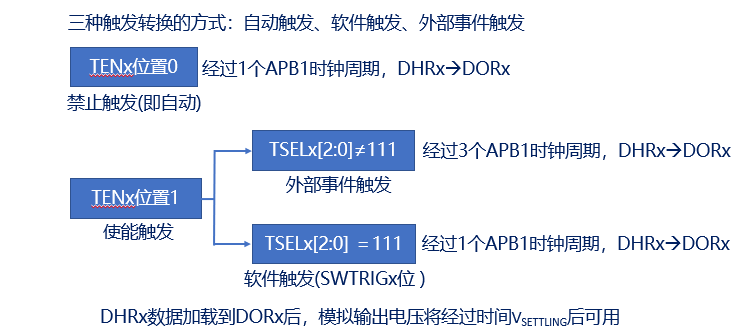
2.4 触发源
2.5 DMA请求

2.6 DAC输出电压

三、DAC输出实验(熟悉)
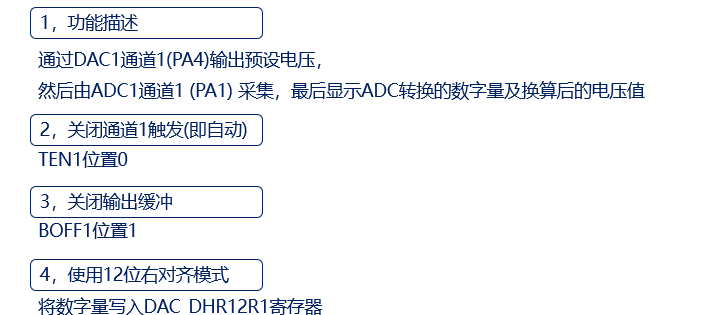
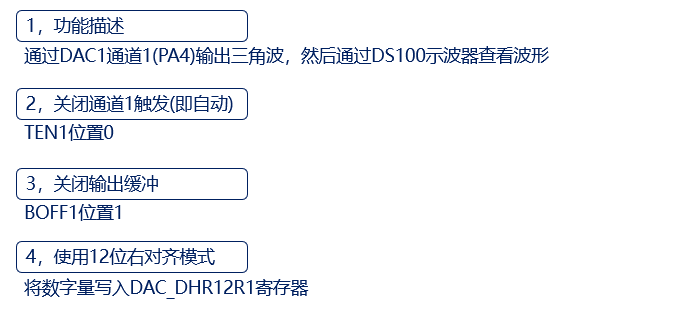
3.1 实验简要(了解)
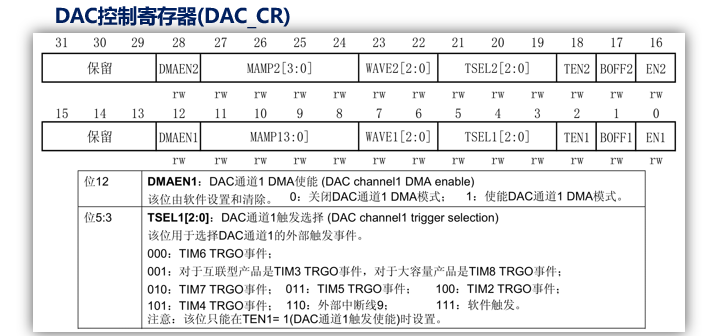
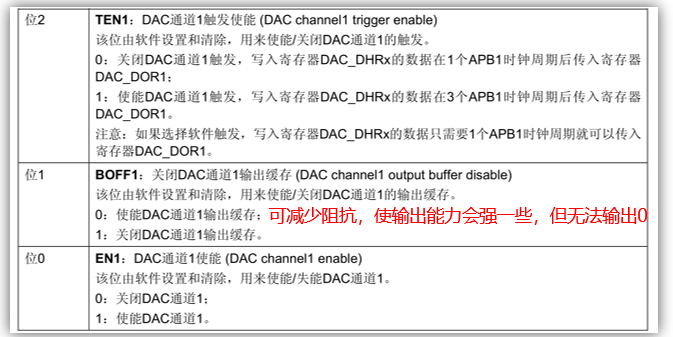
3.2 DAC寄存器介绍(了解)

3.3 DAC输出实验配置步骤(掌握)



3.4 编程实战:DAC输出实验(掌握)
dac.c
#include "./BSP/DAC/dac.h"DAC_HandleTypeDef g_dac_handle;/* DAC初始化函数 */
void dac_init(void)
{DAC_ChannelConfTypeDef dac_ch_conf;g_dac_handle.Instance = DAC;HAL_DAC_Init(&g_dac_handle); /* 初始化DAC */dac_ch_conf.DAC_Trigger = DAC_TRIGGER_NONE; /* 不使用触发功能 */dac_ch_conf.DAC_OutputBuffer = DAC_OUTPUTBUFFER_DISABLE; /* DAC输出缓冲关闭 */HAL_DAC_ConfigChannel(&g_dac_handle, &dac_ch_conf, DAC_CHANNEL_1); /* 配置DAC通道1 */HAL_DAC_Start(&g_dac_handle, DAC_CHANNEL_1); /* 开启DAC通道1 */
}/* DAC MSP初始化函数 */
void HAL_DAC_MspInit(DAC_HandleTypeDef *hdac)
{if (hdac->Instance == DAC){GPIO_InitTypeDef gpio_init_struct;__HAL_RCC_DAC_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();gpio_init_struct.Pin = GPIO_PIN_4;gpio_init_struct.Mode = GPIO_MODE_ANALOG;HAL_GPIO_Init(GPIOA, &gpio_init_struct);}
}/* 设置通道输出电压 */
void dac_set_voltage(uint16_t vol)
{double temp = vol;temp /= 1000;temp = temp * 4096 / 3.3;if (temp >= 4096)temp = 4095; /* 如果值大于等于4096, 则取4095 */HAL_DAC_SetValue(&g_dac_handle, DAC_CHANNEL_1, DAC_ALIGN_12B_R, temp); /* 12位右对齐数据格式设置DAC值 */
}
main.c
#include "./BSP/DAC/dac.h"DAC_HandleTypeDef g_dac_handle;/* DAC初始化函数 */
void dac_init(void)
{DAC_ChannelConfTypeDef dac_ch_conf;g_dac_handle.Instance = DAC;HAL_DAC_Init(&g_dac_handle); /* 初始化DAC */dac_ch_conf.DAC_Trigger = DAC_TRIGGER_NONE; /* 不使用触发功能 */dac_ch_conf.DAC_OutputBuffer = DAC_OUTPUTBUFFER_DISABLE; /* DAC输出缓冲关闭 */HAL_DAC_ConfigChannel(&g_dac_handle, &dac_ch_conf, DAC_CHANNEL_1); /* 配置DAC通道1 */HAL_DAC_Start(&g_dac_handle, DAC_CHANNEL_1); /* 开启DAC通道1 */
}/* DAC MSP初始化函数 */
void HAL_DAC_MspInit(DAC_HandleTypeDef *hdac)
{if (hdac->Instance == DAC){GPIO_InitTypeDef gpio_init_struct;__HAL_RCC_DAC_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();gpio_init_struct.Pin = GPIO_PIN_4;gpio_init_struct.Mode = GPIO_MODE_ANALOG;HAL_GPIO_Init(GPIOA, &gpio_init_struct);}
}/* 设置通道输出电压 */
void dac_set_voltage(uint16_t vol)
{double temp = vol;temp /= 1000;temp = temp * 4096 / 3.3;if (temp >= 4096)temp = 4095; /* 如果值大于等于4096, 则取4095 */HAL_DAC_SetValue(&g_dac_handle, DAC_CHANNEL_1, DAC_ALIGN_12B_R, temp); /* 12位右对齐数据格式设置DAC值 */
}
四、DAC输出三角波实验(熟悉)
4.1 实验简要(了解)
4.2 编程实战:DAC输出三角波实验(掌握)
dac.c
#include "./BSP/DAC/dac.h"
#include "./SYSTEM/delay/delay.h"DAC_HandleTypeDef g_dac_handle;/* DAC初始化函数 */
void dac_init(void)
{DAC_ChannelConfTypeDef dac_ch_conf;g_dac_handle.Instance = DAC;HAL_DAC_Init(&g_dac_handle);dac_ch_conf.DAC_Trigger = DAC_TRIGGER_NONE;dac_ch_conf.DAC_OutputBuffer = DAC_OUTPUTBUFFER_DISABLE;HAL_DAC_ConfigChannel(&g_dac_handle, &dac_ch_conf, DAC_CHANNEL_1);HAL_DAC_Start(&g_dac_handle, DAC_CHANNEL_1);
}/* DAC MSP初始化函数 */
void HAL_DAC_MspInit(DAC_HandleTypeDef *hdac)
{if (hdac->Instance == DAC){GPIO_InitTypeDef gpio_init_struct;__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_DAC_CLK_ENABLE();gpio_init_struct.Pin = GPIO_PIN_4;gpio_init_struct.Mode = GPIO_MODE_ANALOG;HAL_GPIO_Init(GPIOA, &gpio_init_struct);}
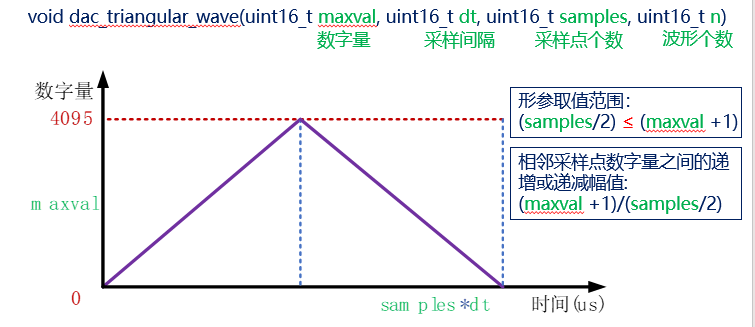
}/*** @brief 设置DAC_OUT1输出三角波* @note 输出频率 ≈ 1000 / (dt * samples) Khz, 不过在dt较小的时候,比如小于5us时, 由于delay_us* 本身就不准了(调用函数,计算等都需要时间,延时很小的时候,这些时间会影响到延时), 频率会偏小.* * @param maxval : 最大值(0 < maxval < 4096), (maxval + 1)必须大于等于samples/2* @param dt : 每个采样点的延时时间(单位: us)* @param samples: 采样点的个数, samples必须小于等于(maxval + 1) * 2 , 且maxval不能等于0* @param n : 输出波形个数,0~65535** @retval 无*/
void dac_triangular_wave(uint16_t maxval, uint16_t dt, uint16_t samples, uint16_t n)
{uint16_t i, j;float incval; /* 递增量 */float Curval; /* 当前值 */if(samples > ((maxval + 1) * 2))return ; /* 数据不合法 */incval = (maxval + 1) / (samples / 2); /* 计算递增量 */for(j = 0; j < n; j++){ Curval = 0;HAL_DAC_SetValue(&g_dac_handle, DAC_CHANNEL_1, DAC_ALIGN_12B_R, Curval); /* 先输出0 */for(i = 0; i < (samples / 2); i++) /* 输出上升沿 */{Curval += incval; /* 新的输出值 */HAL_DAC_SetValue(&g_dac_handle, DAC_CHANNEL_1, DAC_ALIGN_12B_R, Curval);delay_us(dt);}for(i = 0; i < (samples / 2); i++) /* 输出下降沿 */{Curval -= incval; /* 新的输出值 */HAL_DAC_SetValue(&g_dac_handle, DAC_CHANNEL_1, DAC_ALIGN_12B_R, Curval);delay_us(dt);}}
}main.c
int main(void)
{uint8_t t = 0; uint8_t key;HAL_Init(); /* 初始化HAL库 */sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */delay_init(72); /* 延时初始化 */usart_init(115200); /* 串口初始化为115200 */led_init(); /* 初始化LED */lcd_init(); /* 初始化LCD */key_init(); /* 初始化按键 */dac_init(); /* 初始化DAC1_OUT1通道 */lcd_show_string(30, 50, 200, 16, 16, "STM32", RED);lcd_show_string(30, 70, 200, 16, 16, "DAC Triangular WAVE TEST", RED);lcd_show_string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", RED);lcd_show_string(30, 110, 200, 16, 16, "KEY0:Wave1 KEY1:Wave2", RED);lcd_show_string(30, 130, 200, 16, 16, "DAC None", BLUE); /* 提示无输出 */while (1){t++;key = key_scan(0); /* 按键扫描 */if (key == KEY0_PRES) /* 高采样率 , 100hz波形 , 实际只有65.5hz */{lcd_show_string(30, 130, 200, 16, 16, "DAC Wave1 ", BLUE);dac_triangular_wave(4095, 5, 2000, 100); /* 幅值4095, 采样点间隔5us, 2000个采样点, 100个波形 */lcd_show_string(30, 130, 200, 16, 16, "DAC None ", BLUE);}else if (key == KEY1_PRES) /* 低采样率 , 100hz波形 , 实际99.5hz */{lcd_show_string(30, 130, 200, 16, 16, "DAC Wave2 ", BLUE);dac_triangular_wave(4095, 500, 20, 100); /* 幅值4095, 采样点间隔500us, 20个采样点, 100个波形 */lcd_show_string(30, 130, 200, 16, 16, "DAC None ", BLUE);}if (t == 10) /* 定时时间到了 */{LED0_TOGGLE(); /* LED0闪烁 */t = 0;}delay_ms(10);}
}
五、DAC输出正弦波实验(熟悉)
5.1 实验简要(了解)

5.2 DAC输出正弦波实验配置步骤(掌握)

5.3 产生正弦波序列函数介绍(熟悉)
5.4 编程实战:DAC输出正弦波实验(掌握)
dac.c
#include "./BSP/DAC/dac.h"DMA_HandleTypeDef g_dma_dac_handle;
DAC_HandleTypeDef g_dac_dma_handle;extern uint16_t g_dac_sin_buf[4096]; /* 发送数据缓冲区 *//* DAC DMA输出波形初始化函数 */
void dac_dma_wave_init(void)
{DAC_ChannelConfTypeDef dac_ch_conf;__HAL_RCC_DMA2_CLK_ENABLE();g_dma_dac_handle.Instance = DMA2_Channel3;g_dma_dac_handle.Init.Direction = DMA_MEMORY_TO_PERIPH;g_dma_dac_handle.Init.PeriphInc = DMA_PINC_DISABLE;g_dma_dac_handle.Init.MemInc = DMA_MINC_ENABLE;g_dma_dac_handle.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;g_dma_dac_handle.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;g_dma_dac_handle.Init.Mode = DMA_CIRCULAR;g_dma_dac_handle.Init.Priority = DMA_PRIORITY_MEDIUM;HAL_DMA_Init(&g_dma_dac_handle);__HAL_LINKDMA(&g_dac_dma_handle, DMA_Handle1, g_dma_dac_handle);g_dac_dma_handle.Instance = DAC;HAL_DAC_Init(&g_dac_dma_handle);dac_ch_conf.DAC_Trigger = DAC_TRIGGER_T7_TRGO;dac_ch_conf.DAC_OutputBuffer = DAC_OUTPUTBUFFER_DISABLE;HAL_DAC_ConfigChannel(&g_dac_dma_handle, &dac_ch_conf, DAC_CHANNEL_1);HAL_DMA_Start(&g_dma_dac_handle, (uint32_t)g_dac_sin_buf, (uint32_t)&DAC1->DHR12R1, 0);
}/* DAC MSP初始化函数 */
void HAL_DAC_MspInit(DAC_HandleTypeDef *hdac)
{if (hdac->Instance == DAC){GPIO_InitTypeDef gpio_init_struct;__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_DAC_CLK_ENABLE();gpio_init_struct.Pin = GPIO_PIN_4;gpio_init_struct.Mode = GPIO_MODE_ANALOG;HAL_GPIO_Init(GPIOA, &gpio_init_struct);}
}/*** @brief DAC DMA使能波形输出* @note TIM7的输入时钟频率(f)来自APB1, f = 36M * 2 = 72Mhz.* DAC触发频率 ftrgo = f / ((psc + 1) * (arr + 1))* 波形频率 = ftrgo / ndtr; ** @param ndtr : DMA通道单次传输数据量* @param arr : TIM7的自动重装载值* @param psc : TIM7的分频系数* @retval 无*/
void dac_dma_wave_enable(uint16_t cndtr, uint16_t arr, uint16_t psc)
{TIM_HandleTypeDef tim7_handle = {0};TIM_MasterConfigTypeDef tim_mater_config = {0};__HAL_RCC_TIM7_CLK_ENABLE();tim7_handle.Instance = TIM7;tim7_handle.Init.Prescaler = psc;tim7_handle.Init.Period = arr;HAL_TIM_Base_Init(&tim7_handle);tim_mater_config.MasterOutputTrigger = TIM_TRGO_UPDATE;tim_mater_config.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;HAL_TIMEx_MasterConfigSynchronization(&tim7_handle, &tim_mater_config);HAL_TIM_Base_Start(&tim7_handle);HAL_DAC_Stop_DMA(&g_dac_dma_handle, DAC_CHANNEL_1);HAL_DAC_Start_DMA(&g_dac_dma_handle, DAC_CHANNEL_1, (uint32_t *)g_dac_sin_buf, cndtr, DAC_ALIGN_12B_R);
}
main.c
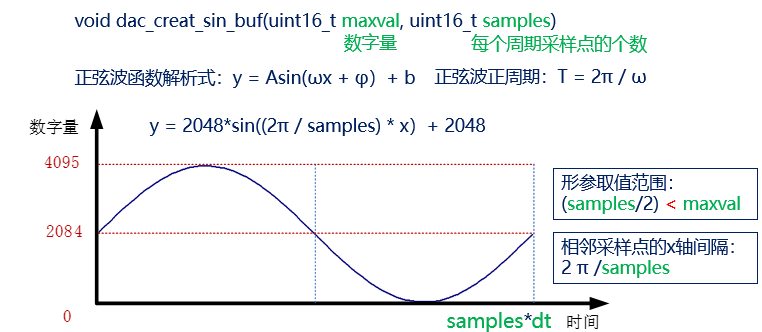
uint16_t g_dac_sin_buf[4096]; /* 发送数据缓冲区 *//*** @brief 产生正弦波序列函数* @note 需保证: maxval > samples/2* @param maxval : 最大值(0 < maxval < 2048)* @param samples: 采样点的个数* @retval 无*/
void dac_creat_sin_buf(uint16_t maxval, uint16_t samples)
{uint8_t i;float outdata = 0; /* 存放计算后的数字量 */float inc = (2 * 3.1415962) / samples; /* 计算相邻两个点的x轴间隔 */if(maxval <= (samples / 2))return ; /* 数据不合法 */for (i = 0; i < samples; i++){/* * 正弦波函数解析式:y = Asin(ωx + φ)+ b* 计算每个点的y值,将峰值放大maxval倍,并将曲线向上偏移maxval到正数区域* 注意:DAC无法输出负电压,所以需要将曲线向上偏移一个峰值的量,让整个曲线都落在正数区域*/outdata = maxval * sin(inc * i) + maxval;if (outdata > 4095)outdata = 4095; /* 上限限定 *///printf("%f\r\n",outdata);g_dac_sin_buf[i] = outdata;}
}int main(void)
{uint8_t t = 0;uint8_t key;HAL_Init(); /* 初始化HAL库 */sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */delay_init(72); /* 延时初始化 */usart_init(115200); /* 串口初始化为115200 */led_init(); /* 初始化LED */lcd_init(); /* 初始化LCD */key_init(); /* 初始化按键 */dac_dma_wave_init();lcd_show_string(30, 50, 200, 16, 16, "STM32", RED);lcd_show_string(30, 70, 200, 16, 16, "DAC DMA Sine WAVE TEST", RED);lcd_show_string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", RED);lcd_show_string(30, 110, 200, 16, 16, "KEY0:3Khz KEY1:30Khz", RED);dac_creat_sin_buf(2048, 100);dac_dma_wave_enable(100, 10 - 1, 72 - 1); /* 100Khz触发频率, 100个点, 得到1Khz的正弦波 */while (1){t++;key = key_scan(0); /* 按键扫描 */if (key == KEY0_PRES) /* 高采样率 */{dac_creat_sin_buf(2048, 100);dac_dma_wave_enable(100, 10 - 1, 24 - 1); /* 300Khz触发频率, 100个点, 得到最高3KHz的正弦波. */}else if (key == KEY1_PRES) /* 低采样率 */{dac_creat_sin_buf(2048, 10);dac_dma_wave_enable(10, 10 - 1, 24 - 1); /* 300Khz触发频率, 10个点, 可以得到最高30KHz的正弦波. */}if (t == 40) /* 定时时间到了 */{LED0_TOGGLE(); /* LED0闪烁 */t = 0;}delay_ms(5);}
}六、PWM DAC实验(熟悉)
6.1, PWM DAC应用背景(了解)

6.2, PWM DAC技术实现原理(了解)
6.2.1,什么是PWM DAC技术?

6.2.2,用分段函数表示PWM波
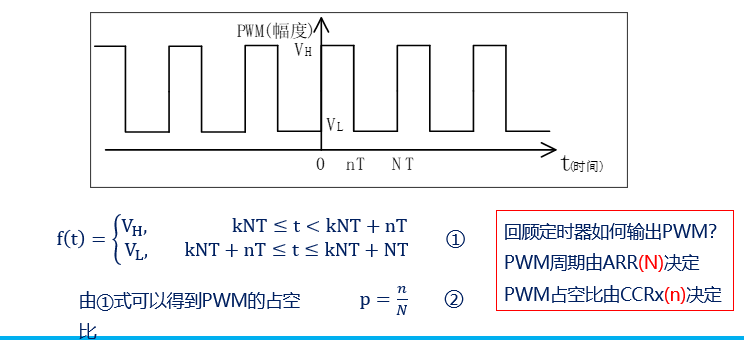
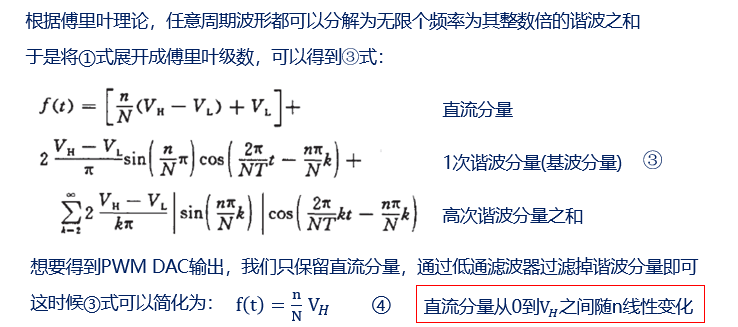
6.2.3,将PWM波分段函数进行傅里叶级数展开
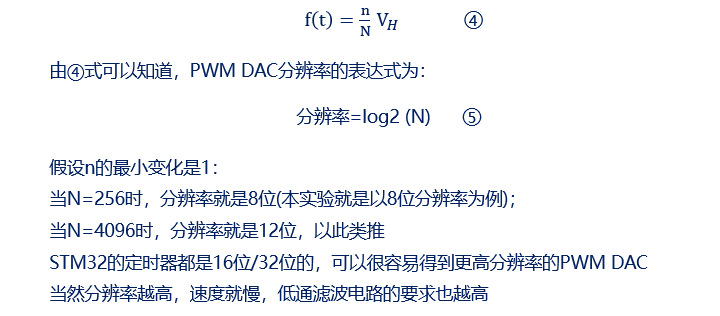
6.2.4,PWM DAC的分辨率
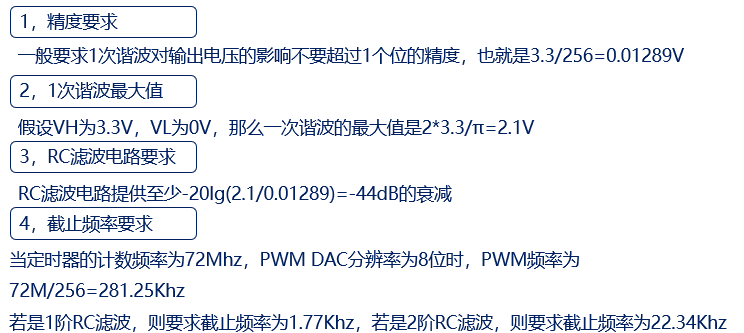
6.2.5,8位分辨率下对RC滤波器的设计要求
6.2.6,PWM DAC二阶低通滤波器原理图

6.3,编程实战: PWM DAC实验(掌握)
pwmdac.c
#include "./BSP/PWMDAC/pwmdac.h"TIM_HandleTypeDef g_timx_pwm_chy_handle;/* PWM DAC初始化 */
void pwmdac_init(uint16_t arr, uint16_t psc)
{TIM_OC_InitTypeDef timx_oc_pwm_chy = {0};g_timx_pwm_chy_handle.Instance = TIM1;g_timx_pwm_chy_handle.Init.Prescaler = psc;g_timx_pwm_chy_handle.Init.Period = arr;g_timx_pwm_chy_handle.Init.CounterMode = TIM_COUNTERMODE_UP;g_timx_pwm_chy_handle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;HAL_TIM_PWM_Init(&g_timx_pwm_chy_handle);timx_oc_pwm_chy.OCMode = TIM_OCMODE_PWM1;timx_oc_pwm_chy.Pulse = 0;timx_oc_pwm_chy.OCPolarity = TIM_OCPOLARITY_HIGH;HAL_TIM_PWM_ConfigChannel(&g_timx_pwm_chy_handle, &timx_oc_pwm_chy, TIM_CHANNEL_1);HAL_TIM_PWM_Start(&g_timx_pwm_chy_handle, TIM_CHANNEL_1);
}/* TIM MSP初始化函数 */
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
{if(htim->Instance == TIM1){GPIO_InitTypeDef gpio_init_struct;__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_TIM1_CLK_ENABLE();gpio_init_struct.Pin = GPIO_PIN_8;gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 推挽复用 */gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */HAL_GPIO_Init(GPIOA, &gpio_init_struct);}
}/* 设置PWM DAC输出电压 */
void pwmdac_set_voltage(uint16_t vol)
{float temp = vol;temp /= 1000;temp = temp * 256 / 3.3;__HAL_TIM_SET_COMPARE(&g_timx_pwm_chy_handle, TIM_CHANNEL_1, temp);
}main.c
int main(void)
{uint16_t adcx;float temp;HAL_Init(); /* 初始化HAL库 */sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */delay_init(72); /* 延时初始化 */usart_init(115200); /* 串口初始化为115200 */led_init(); /* 初始化LED */lcd_init(); /* 初始化LCD */adc_init(); /* 初始化ADC */pwmdac_init(256 - 1, 0);pwmdac_set_voltage(2800);lcd_show_string(30, 50, 200, 16, 16, "STM32", RED);lcd_show_string(30, 70, 200, 16, 16, "ADC TEST", RED);lcd_show_string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", RED);lcd_show_string(30, 110, 200, 16, 16, "ADC1_CH1_VOL:0.000V", BLUE); /* 先在固定位置显示小数点 */while (1){adcx = adc_get_result();temp = (float)adcx * (3.3 / 4096); /* 获取计算后的带小数的实际电压值,比如3.1111 */adcx = temp; /* 赋值整数部分给adcx变量,因为adcx为u16整形 */lcd_show_xnum(134, 110, adcx, 1, 16, 0, BLUE); /* 显示电压值的整数部分,3.1111的话,这里就是显示3 */temp -= adcx; /* 把已经显示的整数部分去掉,留下小数部分,比如3.1111-3=0.1111 */temp *= 1000; /* 小数部分乘以1000,例如:0.1111就转换为111.1,相当于保留三位小数。 */lcd_show_xnum(150, 110, temp, 3, 16, 0X80, BLUE);/* 显示小数部分(前面转换为了整形显示),这里显示的就是111. */LED0_TOGGLE();delay_ms(100);}
}相关文章:
STM32——DAC篇(基于f103)
技术笔记! 一、DAC简介(了解) 1.1 DAC概念 传感器信号采集改变电信号,通过ADC转换成单片机可以处理的数字信号,处理后,通过DAC转换成电信号,进而实现对系统的控制。 1.2 DAC的特性参数 1.3…...

突然提示由于找不到msvcr120.dll,无法继续执行代码有什么办法可以解决?
msvcr120.dll是Microsoft Visual C 2013 Redistributable Package的一部分,它包含了运行时库,用于支持使用Visual C 2013开发的应用程序。如果电脑突然提示由于找不到msvcr120.dll,无法继续执行代码有什么办法可以解决?以下是关于msvcr120.dl…...

swig4.2.1压缩包中里面没有找到swig.exe
官网:Simplified Wrapper and Interface Generator C转 C# 采用Swig.exe 打开Example示例的解决方案:sln 生成 即可查看如何调用和使用.i文件 但是:迅雷不管下载哪个版本都是没有exe 官网说了自带。很迷很迷~ 下载其他版本的时候发现&…...

Vue文本溢出如何自动换行
css新增 word-break: break-all; word-wrap: break-word;...

【系统架构师】-论文-系统安全性与保密性设计
1、摘要: 2018 年初,我所在的公司为一票务公司开发开票业务平台的建设。我在该项目中担任系统架构设计师的职务,主要负责设计平台系统架构和安全体系架构。该平台以采用 B/S 架构服务用户,采用”平台应用”的模式解决现有应用单机独立开票的模…...

Cisco Catalyst 9000 9200 9300 9400 IOS software upgrade
1 背景 从Catalyst 3650 ,3850,Catalyst 9000开始, 更准确的说是IOS XE的交换机的系统镜像安装方式分为2种 Bundle mode Install mode 这2种方工啥区别? Bundle mode 传统方式利用boot system flash:c9k.xx16.bin方式引导 Install mode 将bin文…...
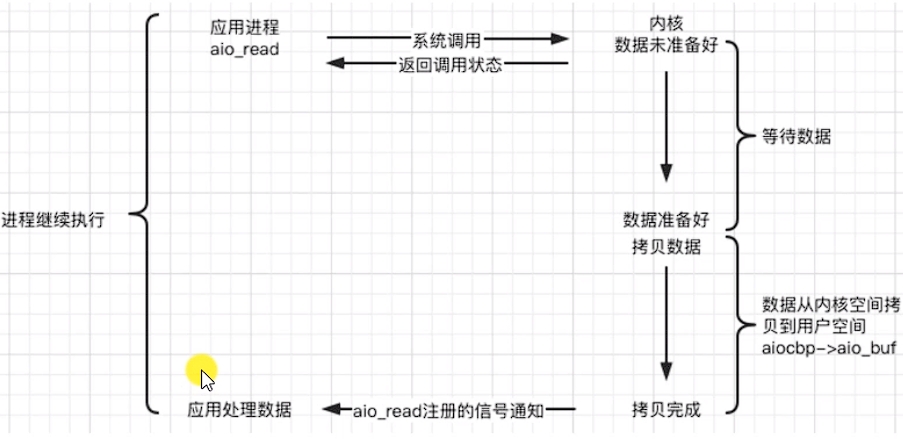
Web Server项目实战2-Linux上的五种IO模型
上一节内容的补充:I/O多路复用是同步的,只有调用某些API才是异步的 Unix/Linux上的五种IO模型 a.阻塞 blocking 调用者调用了某个函数,等待这个函数返回,期间什么也不做,不停地去检查这个函数有没有返回,…...
Docker | 基础指令
环境:centos8 参考: 安装 Docker | Docker 从入门到实践https://vuepress.mirror.docker-practice.com/install/ 安装Docker 卸载旧版本,安装依赖包,添加yum软件源,更新 yum 软件源缓存,安装 docker-ce…...
10款手机黑科技app,每款都好用到爆!
AI视频生成:小说文案智能分镜智能识别角色和场景批量Ai绘图自动配音添加音乐一键合成视频https://aitools.jurilu.com/ 1. 计划程序应用 —— Android Auto Text Android Auto Text(前身为 Do It Later)是一款简单易用的日程安排应用程序&am…...

tomcat请求数据解析过程
前面提到tomcat请求处理的io交互过程,现在开始看下经过io交互后tomcat是怎么处理请求数据的。首先到AbstractProtocol.java中的process方法,注意这个方法是在tomcat线程池分配的线程调用的。生成用来对请求字节流数据进行解析的Http11Processor。 public…...

《扑克牌游戏》
描述 有一个扑克牌游戏,游戏规则是不断地摸牌,尽可能地使手上的牌的点数接近于10,最完美的情况是总点数为10,不可以超过10,否则就爆了。输入10张牌的点数,(每张点数不超过10),请你输出用户应该抓…...

kali模块及字典介绍
1. 基本模块介绍 模块 类型 使用模式 功能 dmitry 信息收集 命令行 whois查询/子域名收集/端口扫描 dnmap 信息收集 命令行 用于组建分布式nmap,dnmap_server为服务端;dnmap_client为客户端 i…...

交换排序、归并排序、计数排序
冒泡排序: void BubbleSort(int* a, int n) {//第一层循环是趟数,第二层是交换for (int i 0; i < n-2; i){int flag 0;for (int j 0; j < n - 2 - i; j){if (a[j] > a[j 1]){swap(&a[j], &a[j 1]);flag 1;}}if (flag 0){break;…...

怎么查看 iOS ipa包 mobileprovision 改动
查看 iOS .ipa 包中的 .mobileprovision 文件(即配置文件或描述文件)的改动,可以通过以下步骤进行: 重命名 .ipa 文件:将 .ipa 文件扩展名改为 .zip。例如,如果文件名为 MyApp.ipa,则重命名为 M…...

【Unitydemo制作】音游制作—控制器与特效
👨💻个人主页:元宇宙-秩沅 👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 👨💻 本文由 秩沅 原创 👨💻 收录于专栏:就业…...

[程序员] 最近的感悟,错误处理占大头?
根据昨天分享的一个问题,想到的。 在代码里,异常处理的代码也算是占大头,扑面而来的就是发生错误时怎么处理的大片代码;而且出现问题的概率是绝对的占大头。所以,异常代码出现bug的概率也在不知不觉中增加!…...
vue3(一) - 结构认识
通过之前博客应该已经完成了vue脚手架的认识和创建(地址),这节我们简单介绍一下需要使用的一些关键技术,后续在详细介绍 结构目录 创建脚手架时,我选择了TypeScript,store,route这三个选项 index.html入口 node_mo…...
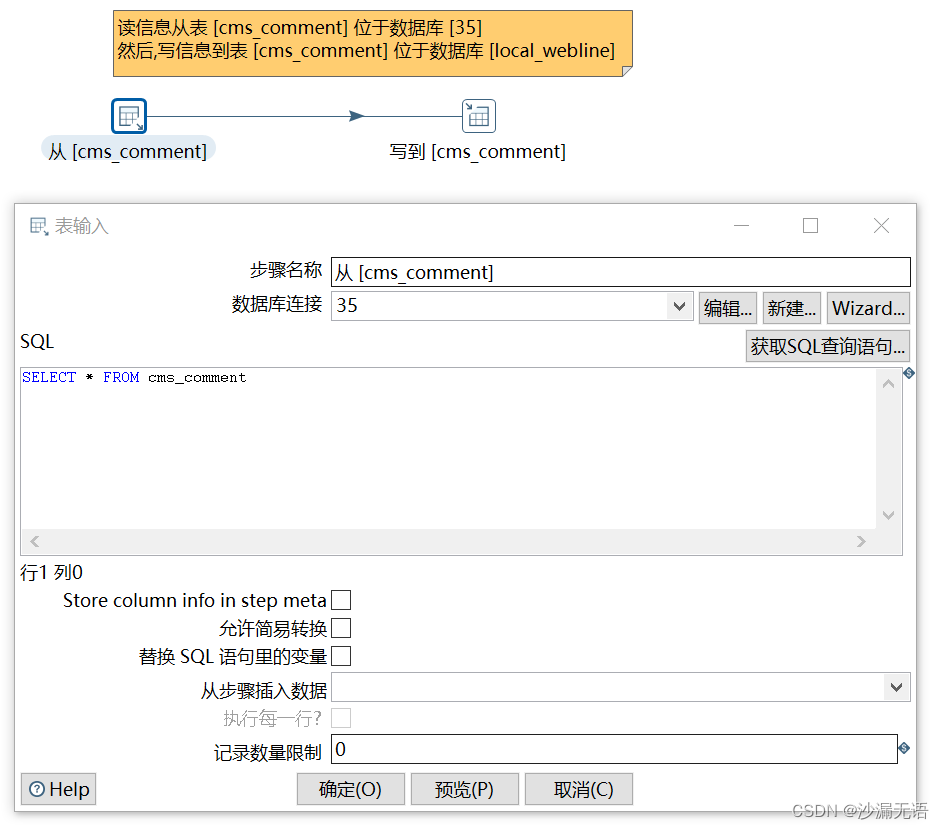
数据库迁移——kettle开发01
背景:数据库的多种多样,在搭建项目之初,并没有详细考虑到数据库的建设,当增加配置不能满足业务场景需要时,这时候考虑到使用更高性能的数据库,如将MySQL更换为oracle数据库。或者在搭建新项目时,…...

Netty: Netty中的组件
文章目录 一、EventLoop1、EventLoop2、EventLoopGroup(1)处理普通时间和定时任务(2)处理IO任务 二、Channel三、Future&Promise四、Handler&Pipeline五、ByteBuf 一、EventLoop 1、EventLoop EventLoop本质是一个单线程…...

Julia编程01:Julia语言介绍
在2020上半年,因为疫情无法返校,所以在家待了半年,期间学习一点了R语言、Python、Julia、linux和C语言,只是学习基础语法并没有项目练习,因此返校半年后差不多都不记得了,现在重新捡起Julia丰富下当时写的笔…...

NotebookLM移动端离线能力真相,92%用户不知道的本地Embedding缓存机制,附配置代码
更多请点击: https://codechina.net 第一章:NotebookLM移动端离线能力真相 NotebookLM 官方未公开支持任何离线推理或文档索引功能,其移动端(iOS/Android)完全依赖与 Google 服务器的实时通信。所有上传的 PDF、TXT 或…...
)
保姆级教程:用vsomeip实现一个简单的车内服务发现与通信(附C++代码)
车载通信实战:基于vsomeip的服务发现与消息交互全流程解析 在智能座舱与自动驾驶技术快速迭代的今天,车载电子控制单元(ECU)间的可靠通信成为系统设计的核心挑战。SOME/IP作为汽车电子领域广泛采用的通信协议,其开源实…...

AI多模型协同架构:破解单点依赖与技术主权困局
1. 这不是科幻讨论,而是今天必须面对的产业现实 “AI未来:一个巨无霸,还是多个巨头?”——这个标题乍看像科技媒体的年终圆桌话题,但在我过去十年跟踪AI基础设施、模型服务与企业落地的实操中,它早已不是假…...

别再傻等串口了!用STM32CubeMX+DMA实现串口收发,CPU效率直接拉满
STM32CubeMXDMA串口通信:释放CPU性能的实战指南 在嵌入式系统开发中,串口通信是最基础也最常用的外设之一。然而,传统的轮询或中断方式处理串口数据会大量占用CPU资源,这在需要同时处理电机控制、传感器数据融合等多任务的复杂系统…...

Windows热键冲突终结者:Hotkey Detective一键定位占用程序
Windows热键冲突终结者:Hotkey Detective一键定位占用程序 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你是…...

Docker 部署实战:前端应用容器化指南
Docker 部署实战:前端应用容器化指南 什么是 Docker? Docker 是一个开源平台,用于开发、部署和运行应用程序。它使用容器化技术,将应用程序及其依赖打包在一个独立的容器中。 Docker 的优势 一致性:开发环境与生产环境…...

AArch64架构SMCR_EL3寄存器详解与SME向量计算优化
1. AArch64系统寄存器与SMCR_EL3概述在Armv8-A/v9架构中,系统寄存器是处理器状态和功能控制的核心枢纽。作为特权级软件与硬件交互的接口,每个系统寄存器都承担着特定的控制、配置或状态监控职责。SMCR_EL3(SME Control Register at EL3&…...

首次购买Token Plan套餐,在真实项目中的成本控制效果初探
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 首次购买Token Plan套餐,在真实项目中的成本控制效果初探 1. 项目背景与成本考量 作为一名独立开发者,我最…...

快速导出微信聊天记录:WeChatExporter让你轻松备份珍贵对话
快速导出微信聊天记录:WeChatExporter让你轻松备份珍贵对话 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾担心手机丢失或更换设备时,那…...

PowerToys汉化指南:3步让英文效率工具变成你的中文助手
PowerToys汉化指南:3步让英文效率工具变成你的中文助手 【免费下载链接】PowerToys-CN PowerToys Simplified Chinese Translation 微软增强工具箱 自制汉化 项目地址: https://gitcode.com/gh_mirrors/po/PowerToys-CN 你是不是曾经因为PowerToys的英文界面…...