Monodle centerNet3D 瑞芯微RKNN、地平线Horizon芯片部署、TensorRT部署
一直想做一点3D目标检测,先来一篇单目3D目标检测Monodle(基于centernet的),训练代码参考官方【代码】,这里只讲讲如何部署。
模型和完整仿真测试代码,放在github上参考链接【模型和完整代码】。
1 模型训练
训练参考官方代码 https://github.com/xinzhuma/monodle
2 导出onnx
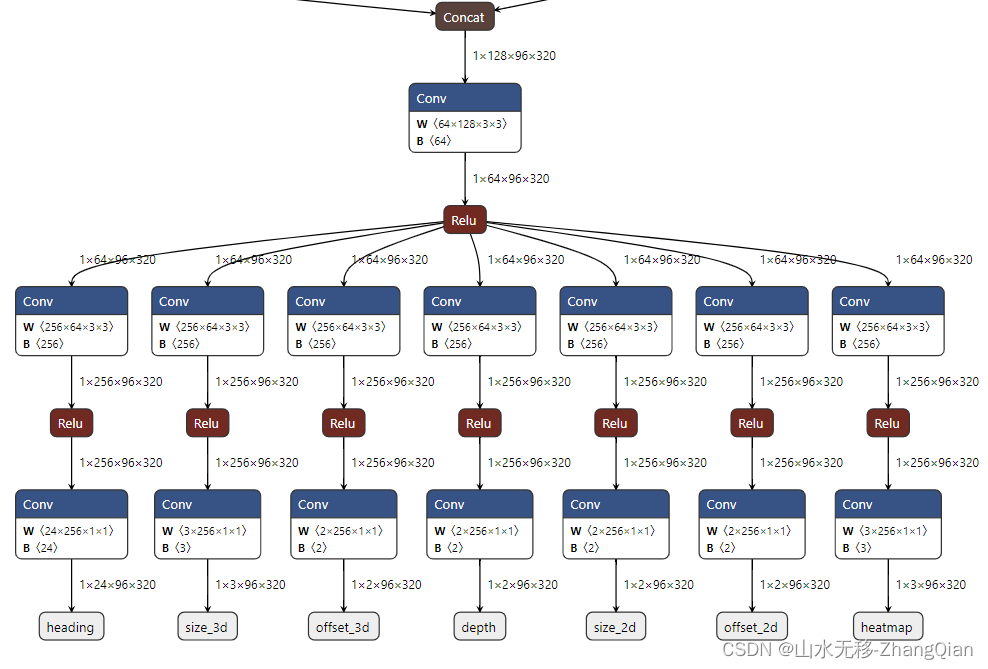
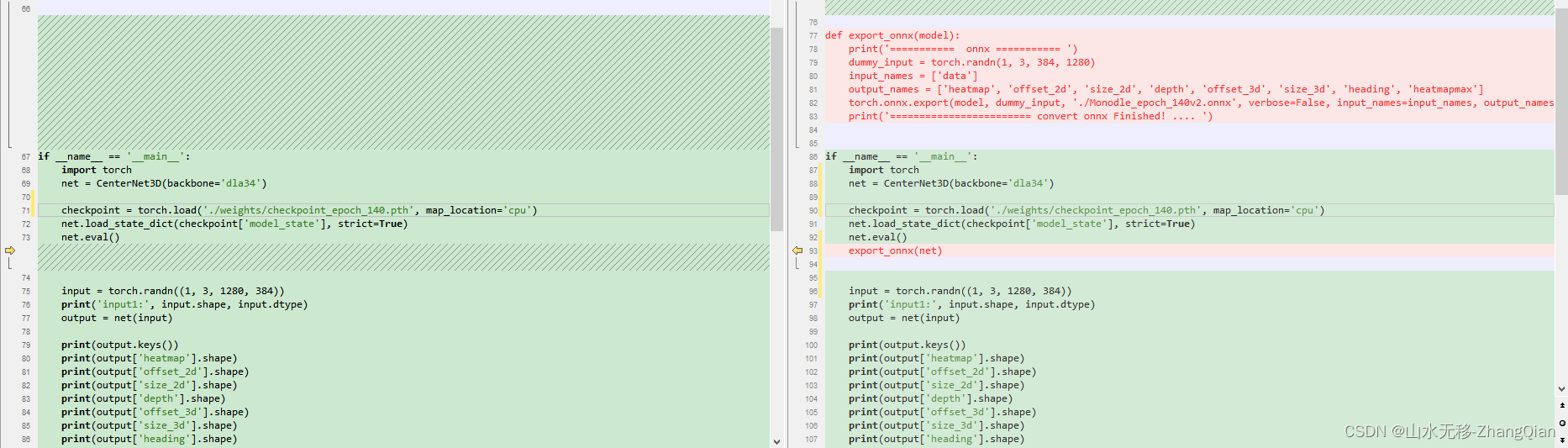
如果按照官方代码导出的onnx,后处理写起来比较复杂且后处理时耗比较长,这里将后处理的部分代码放到模型中。原始官方导出的onnx模型如下图:
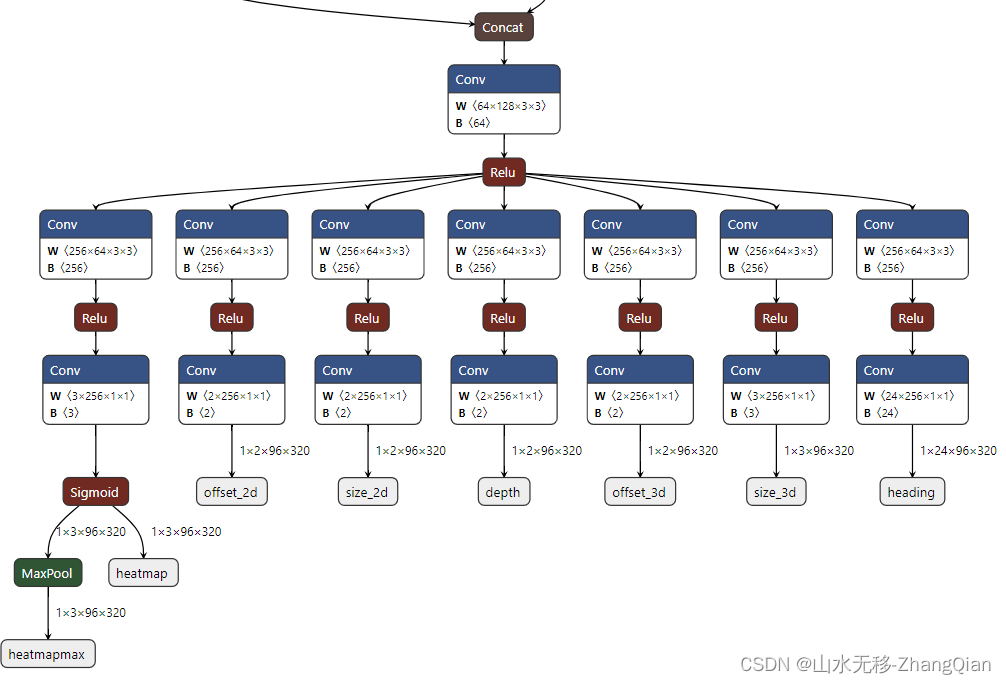
本示例导出的onnx模型如下图,这样导出便于写后处理代码,模型+后处理整个时耗也比较优:
把centernet3d.py 文件拷贝一份,命名为export_onnx.py,并进行如下修改:
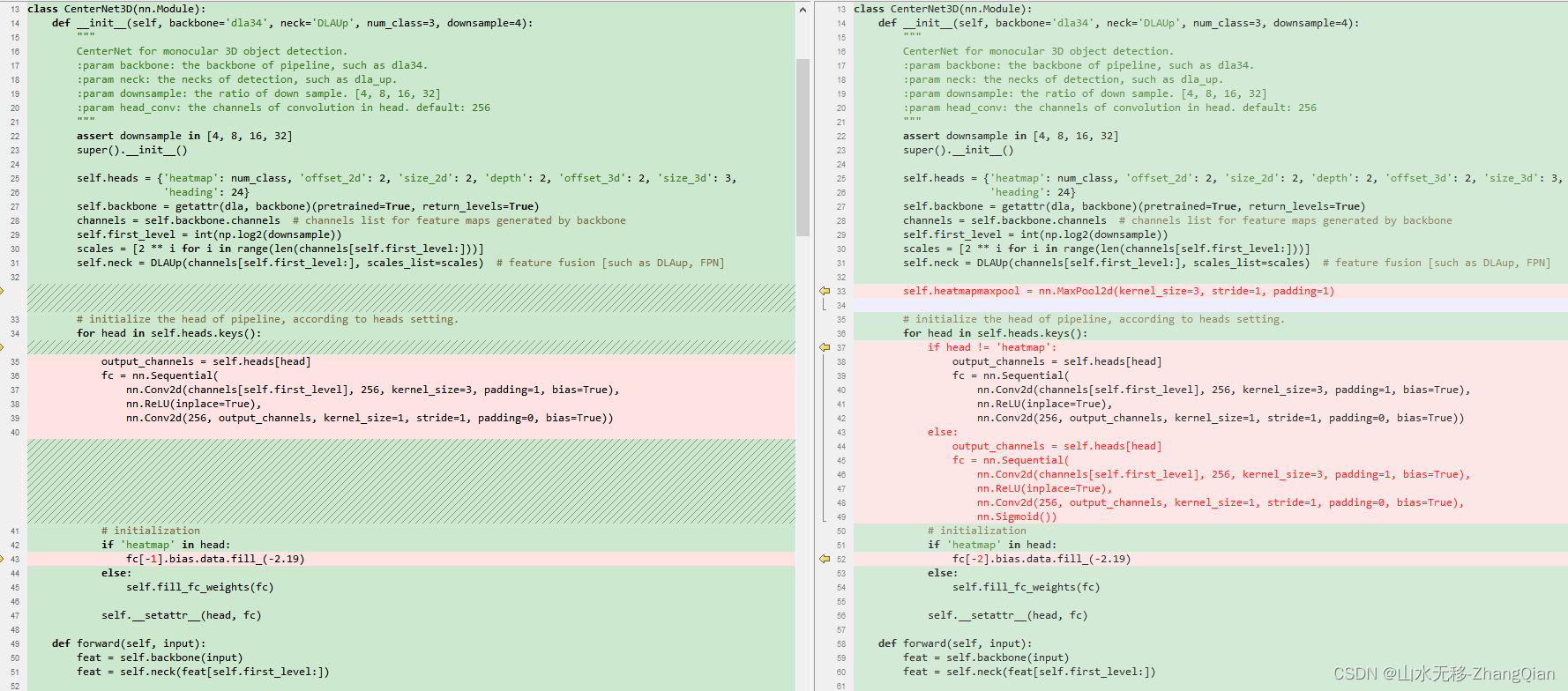
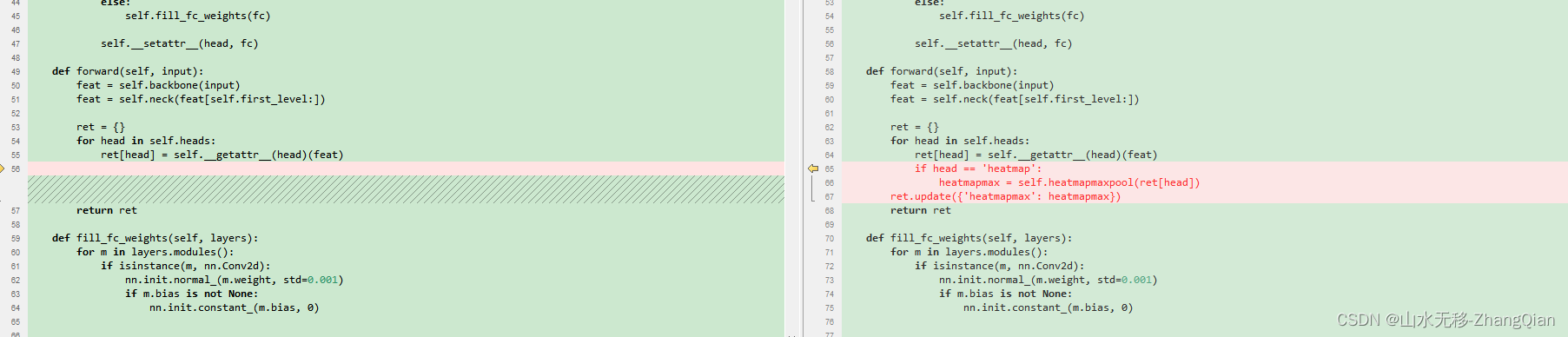
 export_onnx.py 修改后的完整代码:
export_onnx.py 修改后的完整代码:
import os
import cv2
import torch
import torch.nn as nn
import numpy as npfrom lib.backbones import dla
from lib.backbones.dlaup import DLAUp
from lib.backbones.hourglass import get_large_hourglass_net
from lib.backbones.hourglass import load_pretrian_modelclass CenterNet3D(nn.Module):def __init__(self, backbone='dla34', neck='DLAUp', num_class=3, downsample=4):"""CenterNet for monocular 3D object detection.:param backbone: the backbone of pipeline, such as dla34.:param neck: the necks of detection, such as dla_up.:param downsample: the ratio of down sample. [4, 8, 16, 32]:param head_conv: the channels of convolution in head. default: 256"""assert downsample in [4, 8, 16, 32]super().__init__()self.heads = {'heatmap': num_class, 'offset_2d': 2, 'size_2d': 2, 'depth': 2, 'offset_3d': 2, 'size_3d': 3,'heading': 24}self.backbone = getattr(dla, backbone)(pretrained=True, return_levels=True)channels = self.backbone.channels # channels list for feature maps generated by backboneself.first_level = int(np.log2(downsample))scales = [2 ** i for i in range(len(channels[self.first_level:]))]self.neck = DLAUp(channels[self.first_level:], scales_list=scales) # feature fusion [such as DLAup, FPN]self.heatmapmaxpool = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)# initialize the head of pipeline, according to heads setting.for head in self.heads.keys():if head != 'heatmap':output_channels = self.heads[head]fc = nn.Sequential(nn.Conv2d(channels[self.first_level], 256, kernel_size=3, padding=1, bias=True),nn.ReLU(inplace=True),nn.Conv2d(256, output_channels, kernel_size=1, stride=1, padding=0, bias=True))else:output_channels = self.heads[head]fc = nn.Sequential(nn.Conv2d(channels[self.first_level], 256, kernel_size=3, padding=1, bias=True),nn.ReLU(inplace=True),nn.Conv2d(256, output_channels, kernel_size=1, stride=1, padding=0, bias=True),nn.Sigmoid())# initializationif 'heatmap' in head:fc[-2].bias.data.fill_(-2.19)else:self.fill_fc_weights(fc)self.__setattr__(head, fc)def forward(self, input):feat = self.backbone(input)feat = self.neck(feat[self.first_level:])ret = {}for head in self.heads:ret[head] = self.__getattr__(head)(feat)if head == 'heatmap':heatmapmax = self.heatmapmaxpool(ret[head])ret.update({'heatmapmax': heatmapmax})return retdef fill_fc_weights(self, layers):for m in layers.modules():if isinstance(m, nn.Conv2d):nn.init.normal_(m.weight, std=0.001)if m.bias is not None:nn.init.constant_(m.bias, 0)def export_onnx(model):print('=========== onnx =========== ')dummy_input = torch.randn(1, 3, 384, 1280)input_names = ['data']output_names = ['heatmap', 'offset_2d', 'size_2d', 'depth', 'offset_3d', 'size_3d', 'heading', 'heatmapmax']torch.onnx.export(model, dummy_input, './Monodle_epoch_140.onnx', verbose=False, input_names=input_names,output_names=output_names, opset_version=11)print('======================== convert onnx Finished! .... ')if __name__ == '__main__':print('This is main ...')CLASSES = ['Pedestrian', 'Car', 'Cyclist']net = CenterNet3D(backbone='dla34')checkpoint = torch.load('./weights/checkpoint_epoch_140.pth',map_location='cpu')net.load_state_dict(checkpoint['model_state'], strict=True)net.eval()export_onnx(net)input = torch.randn((1, 3, 1280, 384))print('input1:', input.shape, input.dtype)output = net(input)print(output.keys())print(output['heatmap'].shape)print(output['offset_2d'].shape)print(output['size_2d'].shape)print(output['depth'].shape)print(output['offset_3d'].shape)print(output['size_3d'].shape)print(output['heading'].shape)运行 python export_onnx.py 生成.onn文件。
3 测试效果
官方pytorch 测试效果

onnx 测试效果
特别说明: 由于官方代码的2d框是用3d框计算得到的,而本博客是直接解码的模型预测出的2d框,所以2d框有所出入。

4 onnx、rknn、horizon、tensorRT测试转完整代码
模型和完整仿真测试代码、测试图片参考【模型和完整代码】。
相关文章:
Monodle centerNet3D 瑞芯微RKNN、地平线Horizon芯片部署、TensorRT部署
一直想做一点3D目标检测,先来一篇单目3D目标检测Monodle(基于centernet的),训练代码参考官方【代码】,这里只讲讲如何部署。 模型和完整仿真测试代码,放在github上参考链接【模型和完整代码】。 1 模型训练…...

Android Studio 使用MQTT协议开发应用时怎样关闭MQTT连接
Android Studio 使用MQTT协议开发应用时怎样关闭MQTT连接 Android Studio 使用MQTT协议开发应用时关闭MQTT连接 在使用mqtt开发的时候,有时候需要通过 返回 按钮关闭界面或者Activity时,关闭当前页面使用的mqtt连接,这里有两种方式彻底销毁…...
Sping源码(八)—registerBeanPostProcessors
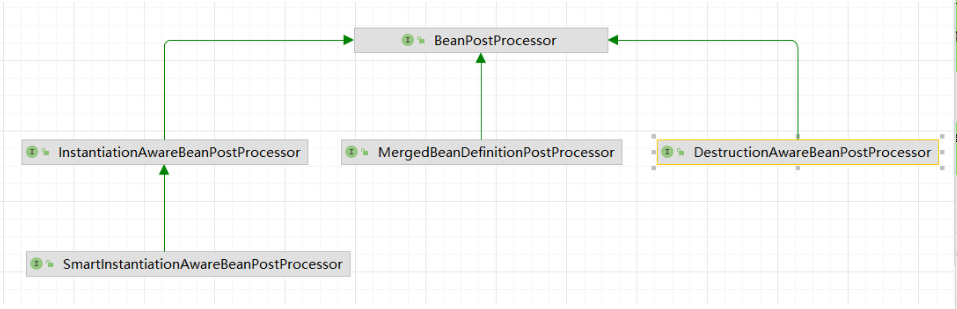
序言 之前我们用大量的篇幅介绍过invokeBeanFactoryPostProcessors()方法的执行流程。 而invokeBeanFactoryPostProcessors的主要逻辑就是遍历执行实现了BeanDefinitionRegistryPostProcesso类(主要是针对BeanDefinition的操作)和BeanFactoryPostProcessor(主要针对BeanFacrot…...
MaxEnt模型文章中存在的问题和处理方法(050B更新)2024.5.24
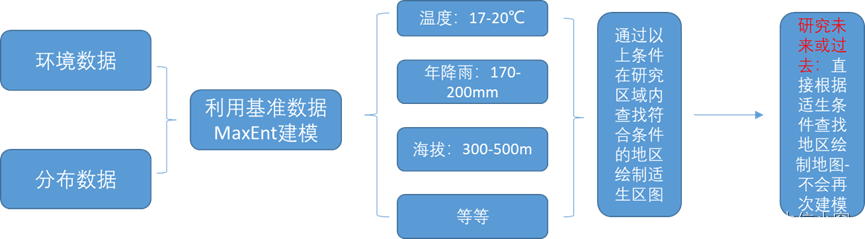
目前多数MaxEnt文章中存在的问题和处理方案。 **问题一:**变量数据使用问题,很多文章把所有变量数据直接使用,但是温度和土壤、植被类型等属于不同数据类型,在数据使用时参数配置是不一样的,产生的结果文件也是不一样的…...

Modular RPG Hero PBR
-掩码着色着色器提供了无限的颜色变化。(适用于标准/HDRP/URP 11.0.0) -为剑与盾/双剑/双剑姿态提供了简单的角色控制器。(不包括弓和魔杖控制器)(它是用旧的输入系统建造的) -HDRP/URP(11.0.0)SRP 100%支持常规着色器和遮罩着色着色器(基于着色器图形) -具有许多模块…...

机器学习之常用算法与数据处理
一、机器学习概念: 机器学习是一门多领域交叉学科,涉及概率论、统计学、计算机科学等多门学科。它的核心概念是通过算法让计算机从数据中学习,改善自身性能。机器学习专门研究计算机怎样模拟或实现人类的学习行为,以获取新的知识…...

Git管理
git作用:代码回溯 版本切换 多人协作 远程备份 git仓库:本地仓库:开发人员自己电脑上的Git仓库 原程仓库:远程服务器上的Git仓库 commit:提交,将本地文件和版本信息保存到本地仓库 push:推送࿰…...
osgearth 3.5 vs 2019编译
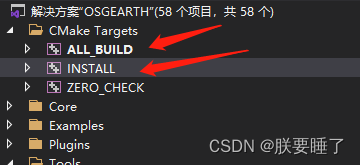
下载源码 git clone --recurse-submodules https://github.com/gwaldron/osgearth.git 修改配置文件 主要是修改bootstrap_vcpkg.bat,一处是vs的版本,第二处是-DCMAKE_BUILD_TYPERELEASE 构建 执行bootstrap_vcpkg.bat vs中生成安装 vs2019打开bu…...

2024最新 Jenkins + Docker 实战教程(六)- Jenkins配置邮箱接收构建通知
😄 19年之后由于某些原因断更了三年,23年重新扬帆起航,推出更多优质博文,希望大家多多支持~ 🌷 古之立大事者,不惟有超世之才,亦必有坚忍不拔之志 🎐 个人CSND主页——Mi…...
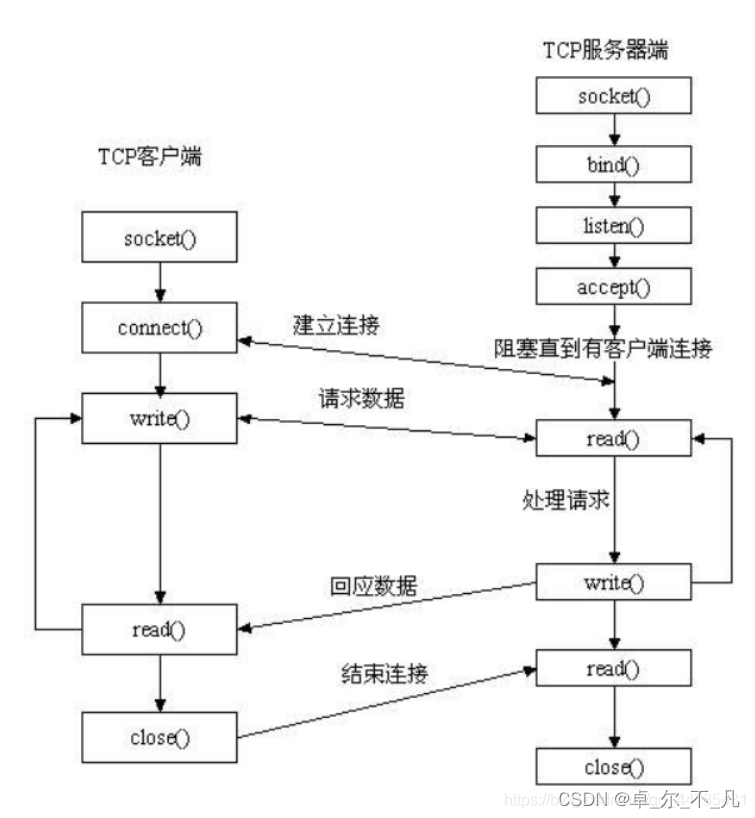
Python学习---基于TCP协议的网络通信程序案例
TCP简介: ●TCP 面向连接、可靠的、基于字节流的传输控制协议 ●TCP的特点 ○面向连接 ○可靠传输 ■应答机制 ■超时重传 ■错误校验 ■流量管控 ●TCP通信模型 TCP严格区分客户…...
正确可用--Notepad++批量转换文件编码为UTF8
参考了:Notepad批量转换文件编码为UTF8_怎么批量把ansi转成utf8-CSDN博客https://blog.csdn.net/wangmy1988/article/details/118698647我参考了它的教程,但是py脚本写的不对. 只能改一个.不能实现批量更改. 他的操作步骤没问题,就是把脚本代码换成我这个. #-*-…...

每天五分钟深度学习框架PyTorch:创建具有特殊值的tensor张量
本文重点 tensor张量是一个多维数组,本节课程我们将学习一些pytorch中已经封装好的方法,使用这些方法我们可以快速创建出具有特殊意义的tensor张量。 创建一个值为空的张量 import torch import numpy as np a=torch.empty(1) print(a) print(a.dim()) print(s.shape) 如图…...

2024电工杯数学建模B题Python代码+结果表数据教学
2024电工杯B题保姆级分析完整思路代码数据教学 B题题目:大学生平衡膳食食谱的优化设计及评价 以下仅展示部分,完整版看文末的文章 import pandas as pd df1 pd.read_excel(附件1:1名男大学生的一日食谱.xlsx) df1# 获取所有工作表名称 e…...

LabVIEW和ZigBee无线温湿度监测
LabVIEW和ZigBee无线温湿度监测 随着物联网技术的迅速发展,温湿度数据的远程无线监测在农业大棚、仓库和其他需环境控制的场所变得日益重要。开发了一种基于LabVIEW和ZigBee技术的多区域无线温湿度监测系统。系统通过DHT11传感器收集温湿度数据,利用Zig…...
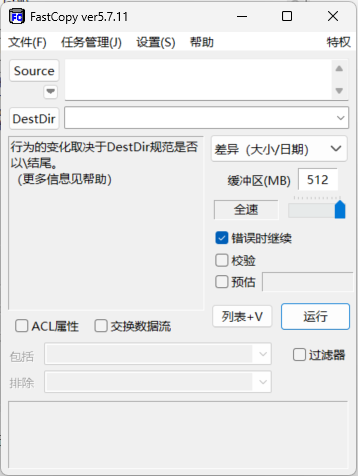
FastCopy
目录 背景: 简介: 原理: 下载地址: 工具的使用: 背景: 简介: FastCopy是一款速度非常快的拷贝软件,软件版本为5.7.1 Fastcopy是日本的最快的文件拷贝工具,磁盘间相互拷贝文件是司空见惯的事情,通常情况…...

stm32常用编写C语言基础知识,条件编译,结构体等
位操作 宏定义#define 带参数的宏定义 条件编译 下面是头文件中常见的编译语句,其中_LED_H可以认为是一个编译段的名字。 下面代码表示满足某个条件,进行包含头文件的编译,SYSTEM_SUPPORT_OS可能是条件,当非0时,可以…...
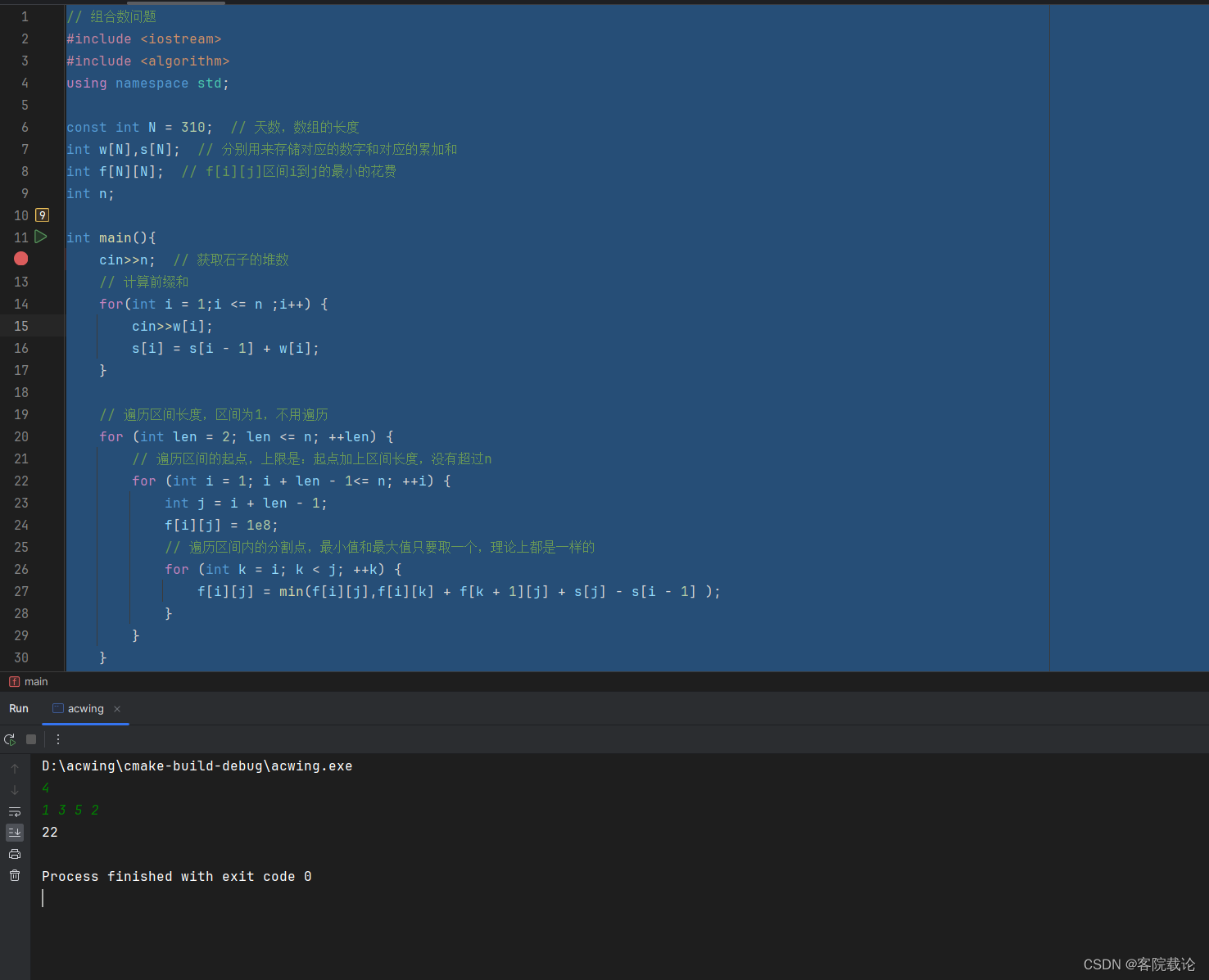
秋招突击——算法——模板题——区间DP——合并石子
文章目录 题目内容思路分析实现代码分析与总结 题目内容 思路分析 基本思路,先是遍历区间长度,然后再是遍历左端点,最后是遍历中间的划分点,将阶乘问题变成n三次方的问题 实现代码 // 组合数问题 #include <iostream> #in…...

数据库——实验12 数据库备份和还原
1. 备份设备的概念和方法 备份设备是指 SQL Server 中存储数据库和事务日志备份副本的载体,备份设备可以被定义成本地的磁盘文件、远程服务器上的磁盘文件、磁带。 在创建备份时,必须选择要将数据写入的备份设备。SQL Server 2005 可以将数据库、事务日…...

Node.js —— 前后端的身份认证 之用 express 实现 JWT 身份认证
JWT的认识 什么是 JWT JWT(英文全称:JSON Web Token)是目前最流行的跨域认证解决方案。 JWT 的工作原理 总结:用户的信息通过 Token 字符串的形式,保存在客户端浏览器中。服务器通过还原 Token 字符串的形式来认证用…...

文旅3d仿真数字人形象为游客提供全方位的便捷服务
在AI人工智能与VR虚拟现实技术的双重驱动下,文旅3D数字代言人正以其独特的魅力,频频亮相于各类文旅场景,为游客带来前所未有的个性化服务体验。他们不仅有趣有品,更能言善道,成为文旅业数字化发展的新亮点。 这些文旅3…...

Ventoy终极指南:一个U盘启动所有系统,告别重复格式化烦恼 [特殊字符]
Ventoy终极指南:一个U盘启动所有系统,告别重复格式化烦恼 😎 【免费下载链接】Ventoy A new bootable USB solution. 项目地址: https://gitcode.com/GitHub_Trending/ve/Ventoy 还在为每次安装系统都要重新制作启动盘而烦恼吗&#x…...

用Python和MNE库玩转BCI Competition IV 2a脑电数据集:从数据加载到可视化全流程
用Python和MNE库玩转BCI Competition IV 2a脑电数据集:从数据加载到可视化全流程当你第一次接触脑电信号处理时,面对原始数据文件可能会感到无从下手。BCI Competition IV 2a数据集作为脑机接口领域的经典基准数据,包含了9名受试者四种运动想…...

Win10系统清理避坑指南:你的BAT脚本真的安全吗?盘点那些不能乱删的文件
Win10系统清理避坑指南:BAT脚本安全操作手册每次看到那些号称"一键清理系统垃圾"的BAT脚本在技术论坛被疯狂转发,我的工程师朋友老张就会忍不住摇头。上周他刚帮一位设计师修复了崩溃的Photoshop——原因正是某个清理脚本删除了Adobe的临时工作…...

告别元素变动导致的报错:探索自动化测试脚本的 AI“自愈”能力
前言:一个所有测试人都经历过的噩梦 周三晚上十一点,CI/CD流水线再次亮起红灯。 你打开日志,满屏的NoSuchElementException扑面而来。仔细一看——前端团队在昨天的版本中重构了登录页面的DOM结构,原本的#login-btn变成了#signin-button-v2,30个测试用例因此全军覆没。 …...
)
告别SVN恐惧症:美术策划也能轻松上手的Unity PlasticSCM极简入门(附团队项目拉取实战)
告别SVN恐惧症:美术策划也能轻松上手的Unity PlasticSCM极简入门(附团队项目拉取实战) 在游戏开发团队中,版本控制系统是协作的基石,但传统工具如SVN往往让非技术成员望而生畏。当美术资源频繁更新、策划案不断迭代时&…...

通过用量看板分析团队大模型API消耗发现优化调用策略的机会
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过用量看板分析团队大模型API消耗发现优化调用策略的机会 作为团队的技术负责人,确保大模型API调用在满足业务需求的…...

3分钟快速安装BetterNCM插件管理器,让你的网易云音乐功能翻倍
3分钟快速安装BetterNCM插件管理器,让你的网易云音乐功能翻倍 【免费下载链接】BetterNCM-Installer 一键安装 Better 系软件 项目地址: https://gitcode.com/gh_mirrors/be/BetterNCM-Installer 还在为网易云音乐功能单一而烦恼吗?想要解锁更多个…...

LPCM框架:大模型驱动的计算机架构设计革命
1. LPCM框架:计算机系统架构设计的范式革命计算机系统架构设计正站在历史性的转折点上。过去八十年来,从ENIAC的真空管到现代7纳米制程的异构计算芯片,架构设计始终遵循着"专家经验EDA工具"的传统范式。但随着摩尔定律逼近物理极限…...

原神私服新纪元:KCN-GenshinServer图形化服务端全功能解析
原神私服新纪元:KCN-GenshinServer图形化服务端全功能解析 【免费下载链接】KCN-GenshinServer 基于GC制作的原神一键GUI多功能服务端。 项目地址: https://gitcode.com/gh_mirrors/kc/KCN-GenshinServer 你是否曾想过拥有一个完全由自己掌控的提瓦特大陆&am…...

如何快速掌握MPC视频渲染器:面向初学者的完整教程
如何快速掌握MPC视频渲染器:面向初学者的完整教程 【免费下载链接】VideoRenderer Внешний видео-рендерер 项目地址: https://gitcode.com/gh_mirrors/vi/VideoRenderer 想要在Windows系统上获得影院级的视频播放体验吗?MPC…...