使用 RT 矩阵进行 3D 点云变换详解(基于 PCL 和 Eigen 库)
在 3D 点云处理中,RT 矩阵是一个常用的工具,用于对点云进行旋转和平移操作。本文将详细介绍 RT 矩阵的概念,并通过一个示例程序演示如何基于 PCL 和 Eigen 库将一帧点云进行矩阵变换再输出。
本教程的示例代码和点云数据可在 GitHub 下载。
什么是 RT 矩阵
RT 矩阵包含旋转矩阵(R)和平移向量(T),组合起来可以描述一个刚体变换。具体来说,RT 矩阵是一个 4x4 的同质坐标变换矩阵,包含两个部分:
- 旋转矩阵(R):这是一个 3x3 的矩阵,用于描述点云的旋转。旋转矩阵是一个正交矩阵,表示绕某个轴的旋转。
- 平移向量(T):这是一个 3x1 的向量,用于描述点云的平移。平移向量表示在各个方向上的移动距离。
组合起来,RT 矩阵可以表示为:
|-------> This column is the translation| 1 0 0 x | \| 0 1 0 y | }-> The identity 3x3 matrix (no rotation) on the left| 0 0 1 z | /| 0 0 0 1 | -> We do not use this line (and it has to stay 0,0,0,1)
其中,R 是 3x3 的旋转矩阵,T 是 3x1 的平移向量,右下角的 1 是为了使矩阵成为同质坐标形式的 4x4 矩阵。
旋转矩阵(R)
旋转矩阵通常可以通过欧拉角、旋转向量或四元数来计算。
欧拉角:通过绕固定轴(如 X, Y, Z 轴)依次旋转相应的角度来构建旋转矩阵。例如:
-
绕 X 轴旋转角度( α \alpha α )
R x ( α ) = [ 1 0 0 0 cos α − sin α 0 sin α cos α ] \mathbf{R_x}(\alpha) = \begin{bmatrix} 1 & 0 & 0 \\ 0 & \cos\alpha & -\sin\alpha \\ 0 & \sin\alpha & \cos\alpha \end{bmatrix} Rx(α)= 1000cosαsinα0−sinαcosα -
绕 Y 轴旋转角度( β \beta β )
R y ( β ) = [ cos β 0 sin β 0 1 0 − sin β 0 cos β ] \mathbf{R_y}(\beta) = \begin{bmatrix} \cos\beta & 0 & \sin\beta \\ 0 & 1 & 0 \\ -\sin\beta & 0 & \cos\beta \end{bmatrix} Ry(β)= cosβ0−sinβ010sinβ0cosβ -
绕 Z 轴旋转角度( γ \gamma γ )
R z ( γ ) = [ cos γ − sin γ 0 sin γ cos γ 0 0 0 1 ] \mathbf{R_z}(\gamma) = \begin{bmatrix} \cos\gamma & -\sin\gamma & 0 \\ \sin\gamma & \cos\gamma & 0 \\ 0 & 0 & 1 \end{bmatrix} Rz(γ)= cosγsinγ0−sinγcosγ0001
通过将这些旋转矩阵按顺序相乘,可以得到最终的旋转矩阵 R \mathbf{R} R。
旋转向量:通过旋转轴和旋转角度来构建旋转矩阵。旋转向量表示绕一个单位向量旋转一定角度,使用 Rodrigues 公式可以将其转换为旋转矩阵。
四元数:四元数是一种表示旋转的方式,能够避免欧拉角的万向节锁问题。通过四元数转换公式可以得到旋转矩阵。
平移向量(T)
平移向量是一个简单的 3x1 向量,表示在 X, Y, Z 三个方向上的平移量:
T = [ t x t y t z ] \mathbf{T} = \begin{bmatrix} t_x \\ t_y \\ t_z \end{bmatrix} T= txtytz
应用 RT 矩阵
假设有一个 3D 点 P = [ x y z ] T \mathbf{P} = \begin{bmatrix} x & y & z \end{bmatrix}^T P=[xyz]T,其同质坐标表示为 P h = [ x y z 1 ] T \mathbf{P_h} = \begin{bmatrix} x & y & z & 1 \end{bmatrix}^T Ph=[xyz1]T。
应用 RT 矩阵进行变换可以表示为: P h ′ = R T ⋅ P h \mathbf{P'_h} = \mathbf{RT} \cdot \mathbf{P_h} Ph′=RT⋅Ph 。
其中, P h ′ = [ x ′ y ′ z ′ 1 ] T \mathbf{P'_h} = \begin{bmatrix} x' & y' & z' & 1 \end{bmatrix}^T Ph′=[x′y′z′1]T ,展开后为:
[ x ′ y ′ z ′ 1 ] = [ R 11 R 12 R 13 t x R 21 R 22 R 23 t y R 31 R 32 R 33 t z 0 0 0 1 ] ⋅ [ x y z 1 ] \begin{bmatrix} x' \\ y' \\ z' \\ 1 \end{bmatrix} = \begin{bmatrix} R_{11} & R_{12} & R_{13} & t_x \\ R_{21} & R_{22} & R_{23} & t_y \\ R_{31} & R_{32} & R_{33} & t_z \\ 0 & 0 & 0 & 1 \end{bmatrix} \cdot \begin{bmatrix} x \\ y \\ z \\ 1 \end{bmatrix} x′y′z′1 = R11R21R310R12R22R320R13R23R330txtytz1 ⋅ xyz1
经过计算,变换后的点 P ′ \mathbf{P'} P′ 的坐标为:
P ′ = [ x ′ y ′ z ′ ] = R ⋅ [ x y z ] + T \mathbf{P'} = \begin{bmatrix} x' \\ y' \\ z' \end{bmatrix} = \mathbf{R} \cdot \begin{bmatrix} x \\ y \\ z \end{bmatrix} + \mathbf{T} P′= x′y′z′ =R⋅ xyz +T
通过 RT 矩阵的应用,可以对一整帧点云的每一个点进行旋转和平移,从而实现点云的刚体变换。
示例程序
下面使用 PCL 库(Point Cloud Library)来实现将一帧点云经过 RT 矩阵转换输出另一帧点云,并将两帧点云同时可视化进行对比的演示。完整示例代码如下所示。
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/common/transforms.h>
#include <Eigen/Dense>
#include <thread>
#include <chrono>int main(int argc, char** argv)
{// 检查命令行参数if (argc != 2) {PCL_ERROR("Usage: %s <input.pcd>\n", argv[0]);return -1;}// 创建点云对象并读取PCD文件pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile<pcl::PointXYZ>(argv[1], *cloud) == -1) {PCL_ERROR("Couldn't read the file %s\n", argv[1]);return -1;}// 创建RT矩阵,将矩阵初始化为单位矩阵Eigen::Matrix4f transform = Eigen::Matrix4f::Identity();// 定义旋转矩阵 (绕Z轴旋转45度)float theta = M_PI / 4; // 弧度制角度transform(0, 0) = cos(theta);transform(0, 1) = -sin(theta);transform(1, 0) = sin(theta);transform(1, 1) = cos(theta);// 定义平移向量 (平移 x 方向2.5米, y 方向0米, z 方向1米)transform(0, 3) = 2.5;transform(1, 3) = 0.0;transform(2, 3) = 1.0;// 创建变换后的点云pcl::PointCloud<pcl::PointXYZ>::Ptr transformed_cloud(new pcl::PointCloud<pcl::PointXYZ>);pcl::transformPointCloud(*cloud, *transformed_cloud, transform);// 创建可视化对象pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));viewer->setBackgroundColor(0, 0, 0);// 设置原始点云的颜色为白色pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> original_color(cloud, 255, 255, 255);viewer->addPointCloud<pcl::PointXYZ>(cloud, original_color, "original cloud");// 设置变换后点云的颜色为红色pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> transformed_color(transformed_cloud, 255, 0, 0);viewer->addPointCloud<pcl::PointXYZ>(transformed_cloud, transformed_color, "transformed cloud");// 设置点云大小viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "original cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "transformed cloud");// 添加坐标系viewer->addCoordinateSystem(1.0);viewer->initCameraParameters();// 开始可视化while (!viewer->wasStopped()) {viewer->spinOnce(100);std::this_thread::sleep_for(std::chrono::milliseconds(100));}return 0;
}
改程序依赖 PCL 库和 VTK 库,配套 CMakeLists.txt 文件如下:
cmake_minimum_required(VERSION 3.1)
project(transform_demo)find_package(PCL REQUIRED)
find_package(VTK REQUIRED)include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})add_executable(${PROJECT_NAME} transform_demo.cpp)
target_link_libraries(${PROJECT_NAME} ${PCL_LIBRARIES} ${VTK_LIBRARIES})
依次执行以下命令编译源代码:
$ mkdir build && cd build
$ cmake ..
$ make
编译完成后,执行 transform_demo 演示程序,指定 PCD 文件:
$ ./transform_demo ../data/2024-04-09-22-06-07.pcd
输出结果如下:

可以看到,白色为原始点云,红色为经过旋转、平移后的点云。
小结
矩阵变换是点云处理中的一个重要的工具,本文介绍了 RT 矩阵的基本概念和计算方法,RT 矩阵可用于对 3D 点云进行旋转和平移操作。我们通过一个例子演示了如何通过 PCL 和 Eigen 构建 RT 矩阵并实现 3D 点云的旋转平移,相信你已经掌握点云的矩阵变换操作。

相关文章:
使用 RT 矩阵进行 3D 点云变换详解(基于 PCL 和 Eigen 库)
在 3D 点云处理中,RT 矩阵是一个常用的工具,用于对点云进行旋转和平移操作。本文将详细介绍 RT 矩阵的概念,并通过一个示例程序演示如何基于 PCL 和 Eigen 库将一帧点云进行矩阵变换再输出。 本教程的示例代码和点云数据可在 GitHub 下载。 什…...

CTFHUB技能树——SSRF(二)
目录 上传文件 FastCGI协议 Redis协议 上传文件 题目描述:这次需要上传一个文件到flag.php了.祝你好运 index.php与上题一样,使用POST请求的方法向flag.php传递参数 //flag.php页面源码 <?phperror_reporting(0);if($_SERVER["REMOTE_ADDR&…...
Vue3实现简单的瀑布流效果,可抽离成组件直接使用
先来看下效果图: 瀑布流中的内容可进行自定义,这里的示例图是通过不同背景颜色的展示进行区分,每个瀑布流中添加了自定义图片和文字描述。 实现方式: 1.建立子组件(可单独抽离)写出瀑布流的样式 文件名为…...

【已解决】C#如何消除Halcon上一次显示窗口的涂层
前言 在通过C#进行封装Halcon的时候发现一个问题,就是如果我重新去标定一个图像的时候不能把上一次的清掉,然后之前的会覆盖掉原来的,这个确实是这样,但是如果说现在的图像面积比之前的小的那么就没有任何效果显示,因…...
XShell-连接-Centos 7
XShell 连接Centos 7 一.准备 安装XShell XShell下载地址: 在虚拟机上安装Centos 7,具体操作自行学习 二.Centos 7的准备 1.网络适配器修改为NAT 2.获取IP 输入命令: ip addr我的Centos 7对外IP为192.168.174.129 三.XShell连接Cento…...

vue3 组件刷新
在 Vue 3 中,如果你想刷新一个组件,有几种方法可以实现。 使用 key 属性: 当你想要强制重新渲染一个组件时,你可以为其添加一个独特的 key 属性。当 key 属性的值改变时,Vue 会强制组件重新创建。 <template> <MyComp…...
Java进阶学习笔记14——模板方法设计模式
面试和看源码。 谈到设计模式: 1、解决了什么问题? 2、怎么写? 模板方法设计模式解决了什么问题? 解决方法中存在重复代码的问题。 写法: 1)定义一个抽象类: 2)在里面定义两个方…...
Centos7静态路由和动态路由
路由,即路由选择(Routing),是指在计算机网络中选择数据传输路径的过程。路由器(Router)是执行路由选择功能的网络设备。路由的主要目的是在复杂的网络结构中,选择最佳路径将数据包从源节点传递到…...

戴尔(Dell)服务器运行状况监控
戴尔(Dell)服务器因其加速的性能、增强的自动化和简化的管理而受到全球许多组织的青睐,许多组织将其业务关键应用程序和功能放在戴尔(Dell)服务器中,因此,有效的戴尔(Dell࿰…...
微信小程序毕业设计-智慧旅游平台系统项目开发实战(附源码+演示视频+LW)
大家好!我是程序猿老A,感谢您阅读本文,欢迎一键三连哦。 💞当前专栏:微信小程序毕业设计 精彩专栏推荐👇🏻👇🏻👇🏻 🎀 Python毕业设计…...
抖音小店新规又来了!平台下调了两项门槛,惊掉商家下巴!
大家好,我是电商糖果 平台这几年为了快速发展电商项目,一直在向商家释放友好政策,目的就是为了吸引更多的商家入驻。 这不官方5月30日起下调了两个门槛,让不少商家大呼不可思议。 第一个就是保证金下调。 平台按照商家经营类目…...
【启程Golang之旅】运算符与流程控制讲解
欢迎来到Golang的世界!在当今快节奏的软件开发领域,选择一种高效、简洁的编程语言至关重要。而在这方面,Golang(又称Go)无疑是一个备受瞩目的选择。在本文中,带领您探索Golang的世界,一步步地了…...

Docker: exec命令浅析
简介 Docker exec命令是Docker提供的一个强大工具,用于在正在运行的容器中执行命令。在此将介绍Docker exec命令的用法和示例,帮助大家更好地理解和使用这个命令。 Docker是一种流行的容器化平台,允许用户在容器中运行应用程序。有时候&#…...

c++的查漏补缺 1、函数指针
今天写链表的插入排序时遇到了一个问题 void InsertionSortList(ListNode* head, int n){if (!head||!head->next) return nullptr;auto dummy new ListNode(-1);dummy->next head;auto pre head;auto cur head->next;while (cur ! NULL){auto tmp dummy;if (pre…...

uniapp+php服务端实现苹果iap内购的消耗性项目和非续期订阅项目,前后端代码加逻辑分析
前言:公司的项目app在上架苹果商店时发现人家要求里面的部分购买项目必须使用iap购买的方式,使用原本的微信支付方式审核不给通过,无奈只能重新研究这个东西。做起来还是有点麻烦,主要是网上的文章很少,不能直接硬抄。…...
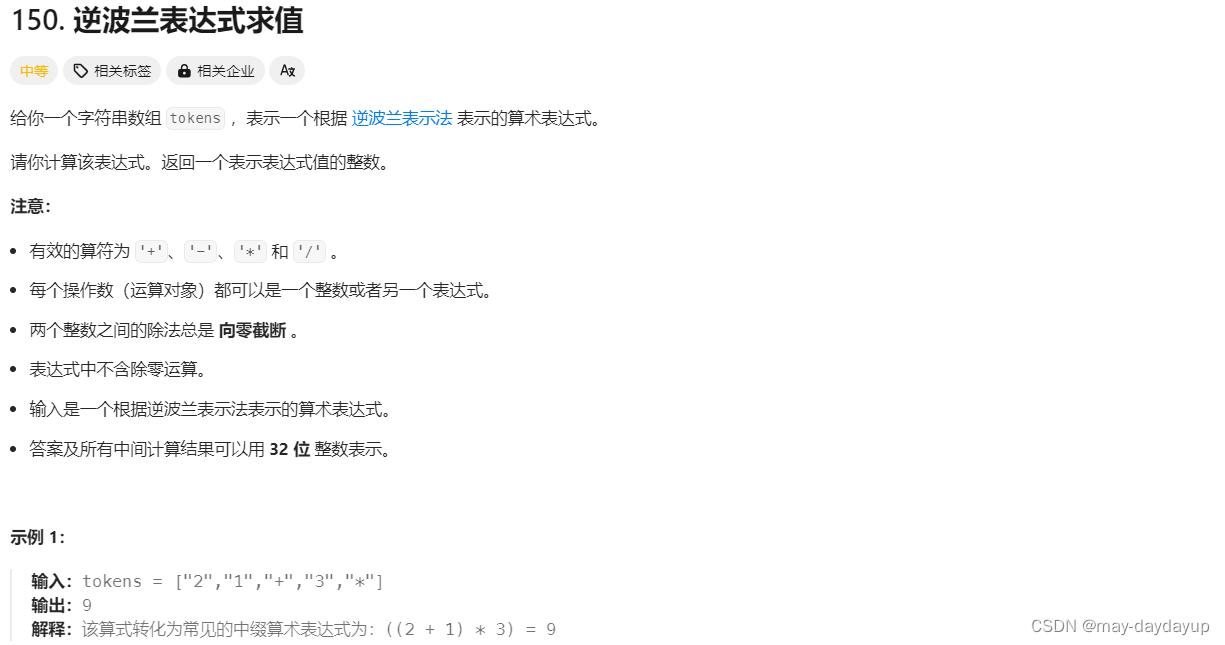
【代码随想录】【算法训练营】【第11天】 [20]有效的括号 [1047]删除字符串中的所有相邻重复项 [150]逆波兰表达式求值
前言 思路及算法思维,指路 代码随想录。 题目来自 LeetCode。 day 11,周六,又开始变的困难了~ 题目详情 [20] 有效的括号 题目描述 20 有效的括号 解题思路 前提:括号匹配 思路:利用栈的后入先出特性…...

vue实现图片懒加载
在src中创建一个directives文件夹在里面创建一个lazy.js文件 在main.js中引入 import lazy from ./directives/lazy app.directive(lazy, lazy) 在app.vue中 <script setup lang"ts"> import { RouterLink, RouterView } from vue-router import HelloWorl…...
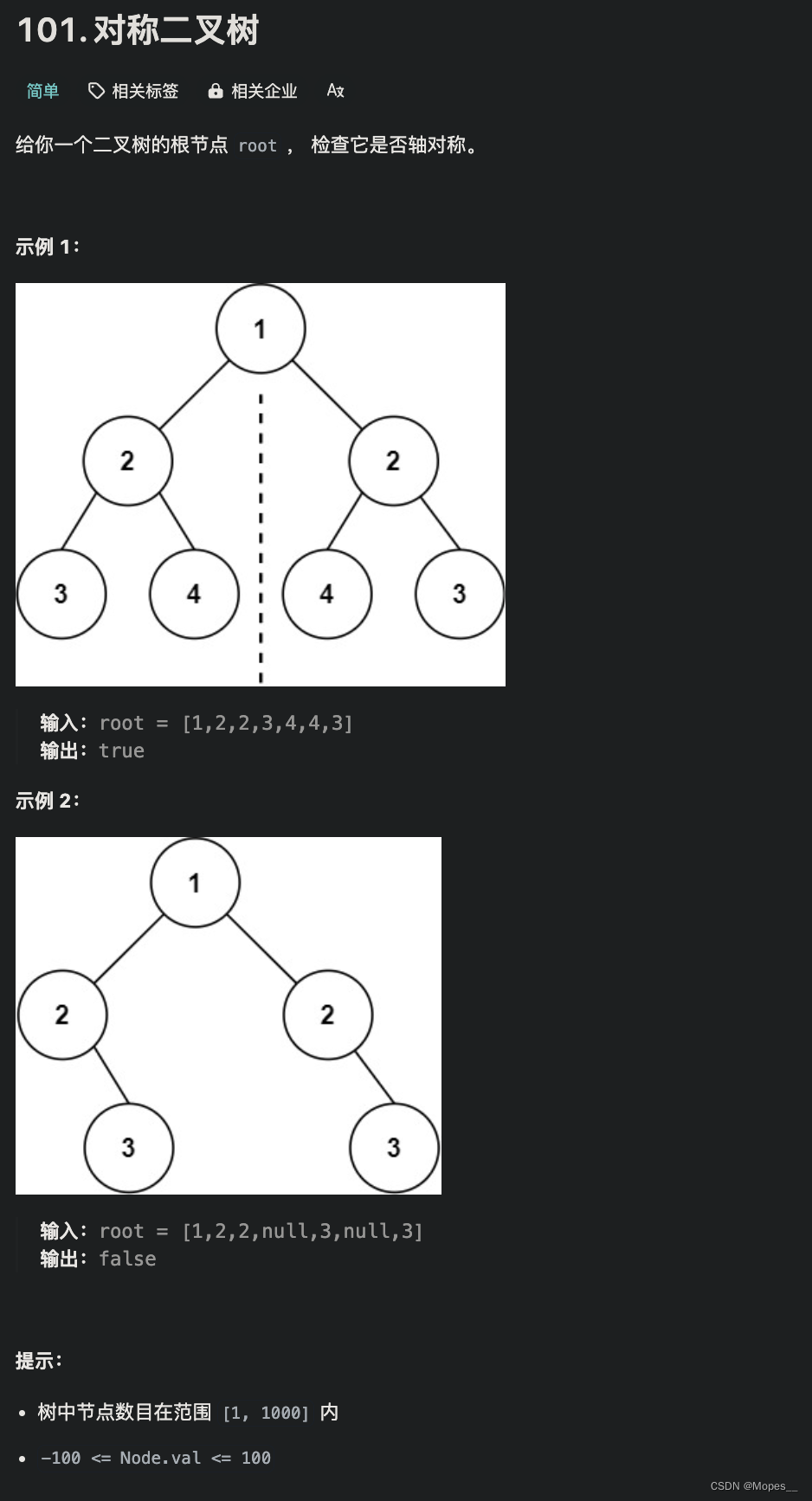
Python | Leetcode Python题解之第101题对称二叉树
题目: 题解: class Solution:# 在【100. 相同的树】的基础上稍加改动def isSameTree(self, p: Optional[TreeNode], q: Optional[TreeNode]) -> bool:if p is None or q is None:return p is qreturn p.val q.val and self.isSameTree(p.left, q.ri…...

周报5.20~5.26
学习内容: 主要了解了Qt的信号和槽、ui页面布局、各类常见控件的使用、绘图事件以及文件操作的相关知识,并且完成相关案例的设计。练习代码了解了多层感知机、激活函数、多项式回归、高维线性回归、暂退法、分布偏移、深度学习计算等相关知识与代码案例…...

Taurus多执行器对比实战:JMeter/Gatling/Locust统一压测方案
1. 为什么选Taurus做多执行器对比——不是为了炫技,而是为了少踩坑在性能测试领域,我见过太多团队卡在“选型”这一步:刚招来一个会写JMeter脚本的工程师,项目突然要压测WebSocket接口,发现JMeter原生支持弱、插件维护…...

③ AI副业第一步:如何找到适合自己的AI赚钱赛道
③ AI副业第一步:如何找到适合自己的AI赚钱赛道选对赛道,努力才有意义。选错赛道,越努力离钱越远。前言:为什么大多数人AI副业做不起来? 我观察了100想做AI副业的人,失败的原因高度一致: 失败路…...

Vulnhub-DC-1
1.信息收集 使用工具nmap扫描主机端口 这是Drupal是使用PHP语言编写的开源内容管理框架(CMF),它由内容管理系统(CMS)和PHP开发框架(Framework)共同构成 Web指纹扫描 发现是:drupal…...

Burp Suite深度解析:从流量抓包到业务逻辑漏洞挖掘
1. 这不是“学个插件”——Burp Suite 是渗透测试的呼吸系统 很多人第一次听说 Burp Suite,是在某篇“三步拿下登录框”的速成教程里:装好Java、拖进浏览器代理、点几下Repeater就弹出密码明文。结果真去测一个中型SaaS后台,不到十分钟就卡在…...

别再死记硬背了!用5个生活化比喻彻底搞懂Linux进程的fork、exec和wait
别再死记硬背了!用5个生活化比喻彻底搞懂Linux进程的fork、exec和wait想象你正在厨房准备一顿大餐。菜谱上写着"切菜"、"炒菜"、"装盘"等步骤,但突然发现需要同时处理多道菜品——这时候,你会本能地让家人分工…...

从开题到定稿零焦虑:okbiye AI 论文写作,帮你把毕业季的 “大山” 变成坦途
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 毕业季的深夜,宿舍台灯下的屏幕亮着刺眼的光,文档里的字数停留在三位数,而 deadline 正一天天逼近。你是…...

PCL 法向量夹角剔除错误匹配点对【2026最新版】
目录 一、 算法简介 1、主要函数 2、参考文献 二、 代码实现 三、 结果展示 四、 参考链接 博客长期更新,本文最新更新时间为:2026年5月24日。代码在PCL1.15.1中测试通过 一、 算法简介 在三维点云配准中,对应点(correspondence)的准确性直接决定了配准算法的精度和鲁棒性…...

企业内统一API网关与Taotoken聚合平台对接方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内统一API网关与Taotoken聚合平台对接方案 在推进AI应用落地的过程中,许多中大型企业面临一个共同挑战:…...

WarcraftHelper终极指南:深度解析魔兽争霸III现代化兼容性解决方案
WarcraftHelper终极指南:深度解析魔兽争霸III现代化兼容性解决方案 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper WarcraftHelper是一款专…...

通过Taotoken实现Hermes Agent自定义模型供应商接入
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过Taotoken实现Hermes Agent自定义模型供应商接入 Hermes Agent是一个流行的AI智能体开发框架,它支持通过配置自定义…...