源码编译安装Rsync数据同步
源码编译安装
RPM软件包:rpm -ivh 或者 yum -y install
需要开发编译工具gcc、gcc-c++、make等...
源码包----开发工具gcc与make----》可以执行的程序-----》运行安装
•主要优点
–获得软件的最新版,及时修复bug
–软件功能可按需选择/定制,有更多软件可供选择
–源码包适用各种平台
–……
-
步骤1:安装开发工具gcc与make,释放源代码至指定目录
-
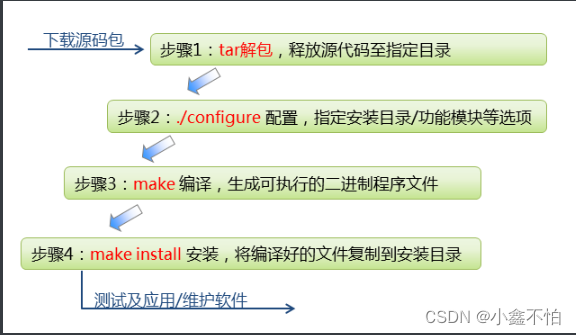
步骤2:tar解包,释放源代码至指定目录
-
步骤3:./configure 配置,指定安装目录/功能模块等选项
-
步骤4:make 编译,生成可执行的二进制程序文件
-
步骤5:make install 安装,将编译好的文件复制到安装目录
真机tools.tar.gz 传递数据到虚拟机
真机为Linux:
]# ls /linux-soft/s1]# scp /linux-soft/s1/tools.tar.gz root@192.168.88.240:/root
真机为windows:windterm进行上传tools.tar.gz

虚拟机:192.168.88.4
![]()
案例
虚拟机A
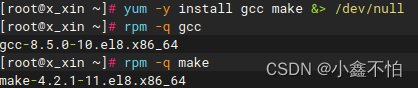
1.安装开发工具
[root@server ~]# yum -y install gcc make[root@server ~]# rpm -q gcc[root@server ~]# rpm -q make[root@server ~]#
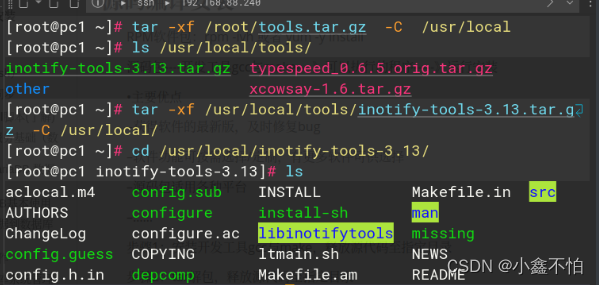
2.进行解压缩
源码包默认放在/usr/local
[root@server ~]# tar -xf /root/tools.tar.gz -C /usr/local[root@server ~]# ls /usr/local/toolsinotify-tools-3.13.tar.gz #监听文件
![]()
3.进行tar解包
[root@server ~]# tar -xf /usr/local/tools/inotify-tools-3.13.tar.gz -C /usr/local/ [root@server ~]# ls /usr/local/[root@server ~]# cd /usr/local/inotify-tools-3.13/[root@server ~]# ls
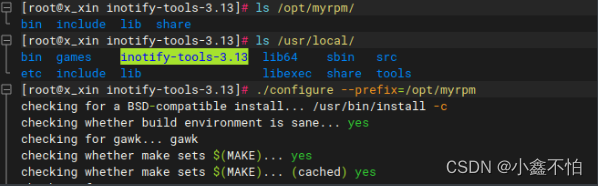
4.运行configure脚本
-
作用1:检测当前系统是否安装gcc
-
作用2:指定安装位置与功能
-
作用3:生成Makefile文件(制作程序的大纲,做菜的菜谱) ./configure
只能在当前目录下,生成makefile文件
[root@server ~]# cd /usr/local/inotify-tools-3.13/[root@server ~]# ./configure --help #查看帮助信息,大概浏览一下[root@server ~]# ./configure --prefix=/opt/myrpm #指定安装位置,此步骤不产生相应的目录
常见的报错信息:
gcc开发工具没有安装checking for gcc... nochecking for cc... nochecking for cl.exe... noconfigure: error: no acceptable C compiler found in $PATHSee `config.log' for more details.
5.进行make编译,变成可以执行的程序(放在内存中)只能在当前目录下
【此时的目的是生成二进制文件】
[root@server ~]# cd /usr/local/inotify-tools-3.13/[root@server inotify-tools-3.13]# make
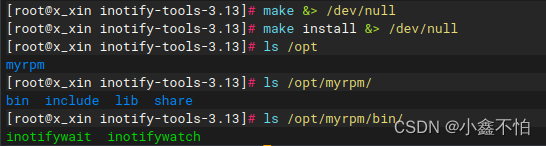
6.进行make install安装。 只能在当前目录下
[root@server ~]# cd /usr/local/inotify-tools-3.13/[root@server inotify-tools-3.13]# make install [root@server inotify-tools-3.13]# ls /opt/[root@server inotify-tools-3.13]# ls /opt/myrpm/[root@server inotify-tools-3.13]# ls /opt/myrpm/bin/
rsync同步+监视+ssh
数据同步
同步的实时性
-
按照固定周期定期同步
-
时间间隔不好固定,同步不及时或资源浪费
实时性较差
Linux内核的inotify机制
-
提高时间响应式的文件系统通知机制
-
安装inotify-tools 控制工具可调用此机制实现监控
• 命令用法
rsync [选项...] 源目录 目标目录
• rsync操作选项
-
-n:测试同步过程,不做实际修改
-
--delete:删除目标文件夹内多余的文档
-
-a:归档模式,相当于-rlptgoD
-
-v:显示详细操作信息
-
-X:保持acl策略不变
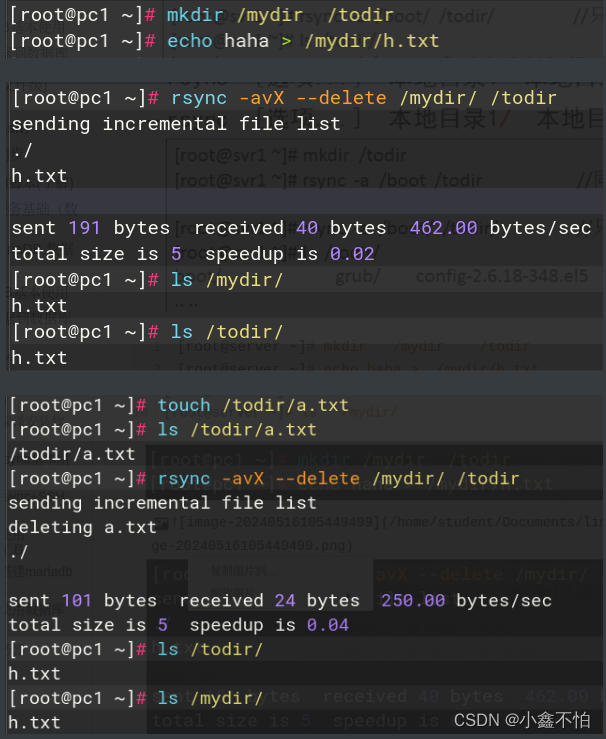
本地同步(文件级)
#一般默认10G以上采用rsyns,低于10G也可以,看个人爱好。
#每使用rsyns一次,就同步一次。
#不加--delete ,就是只改不删除
[root@server ~]# mkdir /mydir /todir [root@server ~]# echo haha > /mydir/h.txt [root@server ~]# rsync -avX --delete /mydir/ /todir #同步目录的内容[root@server ~]# ls /mydir/[root@server ~]# ls /todir/[root@server ~]# touch /todir/a.txt [root@server ~]# ls /todir/[root@server ~]# rsync -avX --delete /mydir/ /todir[root@server ~]# ls /todir/[root@server ~]# ls /mydir/
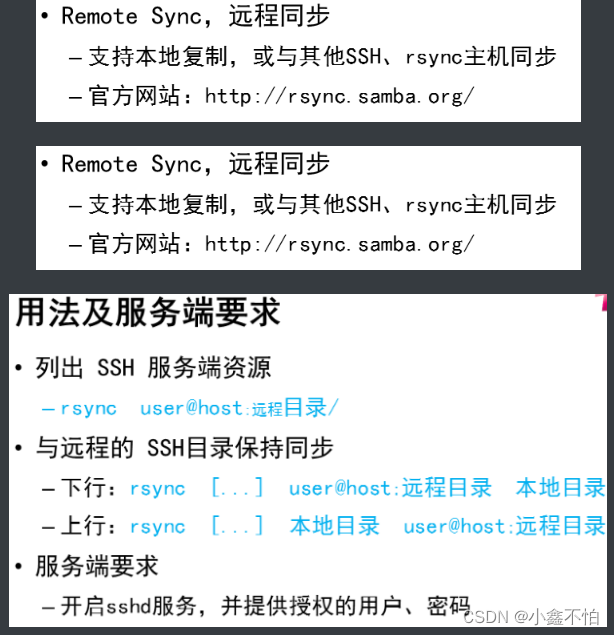
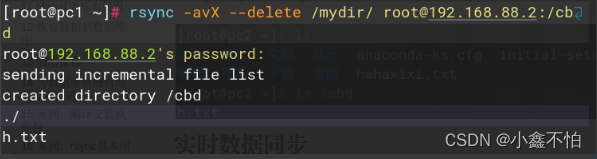
远程同步(rsync+ssh)
与远程的 SSH目录保持同步
下行:rsync [...] user@host:远程目录 本地目录
上行:rsync [...] 本地目录 user@host:远程目录
虚拟机A的/mydir目录的内容与虚拟机B的/mnt进行同步
虚拟机A:
[root@server ~]# rsync -avX --delete /mydir/ root@192.168.88.2:/mnt……..connecting (yes/no)? yesroot@192.168.88.2's password: #输入密码
虚拟机B:
[root@server ~]# ls /mnt

实时数据同步
虚拟机A的/mydir/目录的内容与虚拟机B的/mnt进行同步
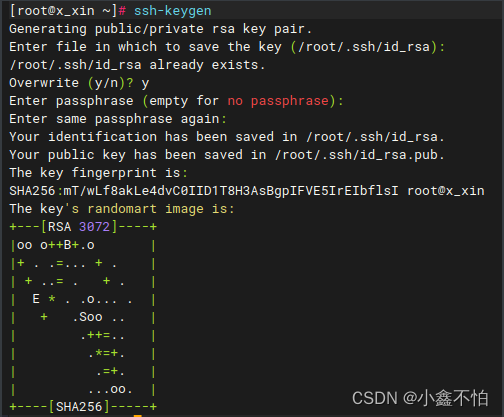
实现ssh无密码验证(公钥与私钥)
虚拟机A
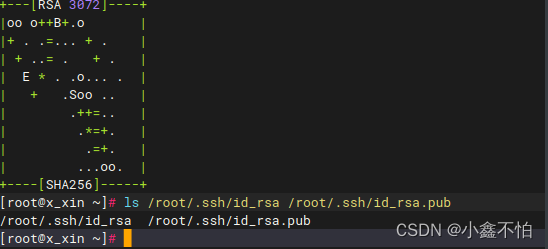
1.虚拟机A生成公钥与私钥
[root@server ~]# ssh-keygen #一路回车[root@server ~]# ls /root/.ssh/id_rsa(私钥) id_rsa.pub(公钥) known_hosts(记录曾经远程管理过的机器)
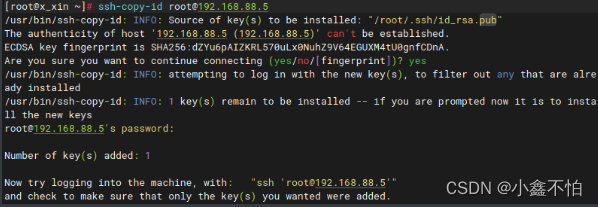
2.虚拟机A将公钥传递给虚拟机B
[root@server ~]# ssh-copy-id root@192.168.88.5[root@server ~]# rsync -avX --delete /mydir/ root@192.168.88.5:/remove_file
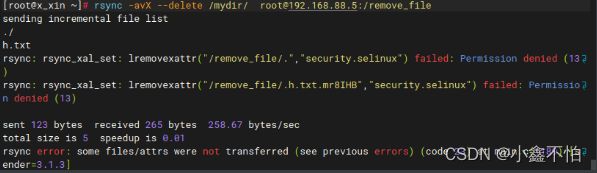
同步源文件(192.168.88.4)

192.168.88.5---同步前
192.168.88.5---同步后
![]()
监控目录内容变化工具
• 基本用法
inotifywait [选项] 目标文件夹
• 常用命令选项
-m,持续监控(捕获一个事件后不退出)
-r,递归监控、包括子目录及文件
-q,减少屏幕输出信息
-e,指定监视的 modify、move、create、delete、attrib 等事件类别
inotifywait 监控目录内容变化rsync -avX --delete /mydir/ root@192.168.88.2:/mnt
书写shell脚本(了解)
脚本:可以运行一个文件,实现某种功能
中文:新建用户zhangsan shell: useradd zhangsan
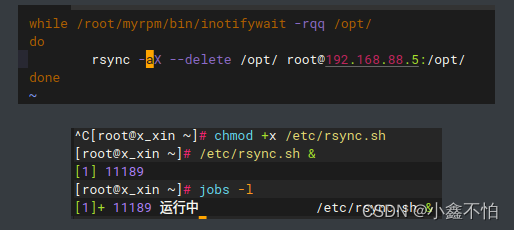
[root@server /]# vim /root/hello.sh echo hello world hostname id root ifconfig | head -2 [root@server /]# chmod +x /root/hello.sh #所有人赋予执行权限 [root@server /]# /root/hello.sh #绝对路径执行脚本 重复性:循环解决 格式: while 条件do重复执行的事情done [root@server /]# vim /etc/rsync.sh while /opt/myrpm/bin/inotifywait -rqq /opt/ do rsync -aX --delete /mydir/ root@192.168.88.5:/opt/ done [root@server /]# chmod +x /etc/rsync.sh #赋予执行权限 [root@server /]# /etc/rsync.sh & #放入后台运行脚本程序 [root@server /]# jobs -l #-l选项 显示进程的pid [1] + 17707 运行中 /etc/rsync.sh & [root@server /]# kill 17707 #停止脚本,可以杀死进
案例:编译安装软件包
问题
本例要求掌握常规源代码应用的安装过程,通过编译的方式安装inotify-tools 软件工具,完成下列任务:
-
释放 inotify-tools-3.13.tar.gz 源码包
-
配置 ./configure 【生成makefile文件,指定安装位置 】
-
编译 make、安装 make install
-
测试inotifywait监控工具的用法及用途
方案
对于标准源码发布的C/C++软件包,编译安装一般包括以下过程:
-
解包:使用tar命令,将下载的源代码释放至指定目录
-
配置:执行源码目录内的 ./configure 脚本,指定安装目录/功能模块等选项
-
编译:在源码目录下执行 make 操作,根据配置清单Makefile生成可执行的二进制程序文件
-
安装:在源码目录下执行make install 操作,将编译好的程序及相关文件复制到安装目录
步骤
实现此案例需要按照如下步骤进行。
步骤一:确认已配置好编译环境
[root@svr7 ~]# yum -y install gcc gcc-c++ make.. ..[root@svr7 ~]# gcc --versiongcc (GCC) 4.8.5 20150623 (Red Hat 4.8.5-4)Copyright (C) 2015 Free Software Foundation, Inc.This is free software; see the source for copying conditions. There is NOwarranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
步骤二:编译安装inotify-tools软件包
1)解包inotify-tools-3.13.tar.gz文件
[root@svr7 ~]# ls inotify-tools-3.13.tar.gzinotify-tools-3.13.tar.gz[root@svr7 ~]# tar xf inotify-tools-3.13.tar.gz -C /usr/src/
2)配置 ./configure,安装目录默认(/usr/local/*/)
[root@svr7 ~]# cd /usr/src/inotify-tools-3.13/ //进入源码目录[root@svr7 inotify-tools-3.13]# ./configure //配置操作checking for a BSD-compatible install... /usr/bin/install -cchecking whether build environment is sane... yeschecking for gawk... gawk.. ..configure: creating ./config.statusconfig.status: creating Makefile.. ..[root@svr7 inotify-tools-3.13]# ls Makefile //检查配置结果Makefile
3)编译 make
[root@svr7 inotify-tools-3.13]# make.. ..Making all in srcmake[2]: Entering directory `/usr/src/inotify-tools-3.13/src'make[3]: Entering directory `/usr/src/inotify-tools-3.13'make[3]: Leaving directory `/usr/src/inotify-tools-3.13'.. ..
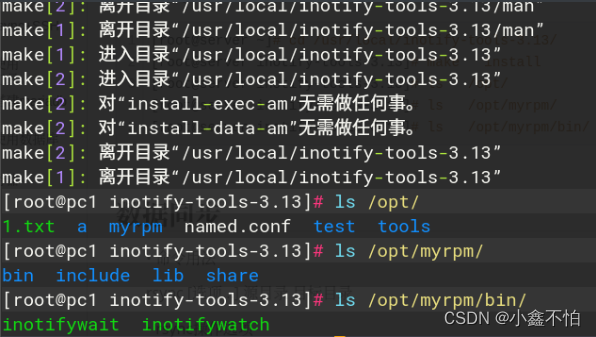
4)安装 make install
[root@svr7 inotify-tools-3.13]# make install.. ../usr/bin/install -c .libs/inotifywait /usr/local/bin/inotifywait/bin/sh ../libtool --mode=install /usr/bin/install -c 'inotifywatch' '/usr/local/bin/inotifywatch'.. ..[root@svr7 inotify-tools-3.13]# find /usr/local/ -name "inotify*"/usr/local/bin/inotifywait //确认安装结果/usr/local/bin/inotifywatch/usr/local/include/inotifytools/usr/local/include/inotifytools/inotifytools.h
步骤三:测试inotify-tools软件程序
软件包inotify-tools提供了一个主要程序inotifywait,可以用来监控指定目录或文档的变化,并及时给出通知。
1)开启对/opt目录的事件监控
-
-m,持续监控(捕获一个事件后不退出)
-
-r,递归监控、包括子目录及文件
-
-q,减少屏幕输出信息
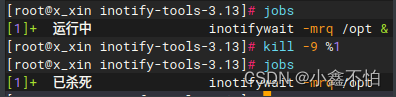
[root@svr7 ~]# inotifywait -mrq /opt & //开启监控[1] 15568

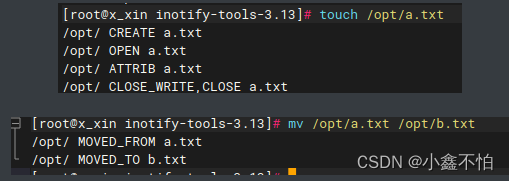
2)修改/opt/目录内容,观察屏幕输出信息
[root@svr7 ~]# touch /opt/a.txt //新建文件a.txt/opt/ CREATE a.txt/opt/ OPEN a.txt/opt/ ATTRIB a.txt/opt/ CLOSE_WRITE,CLOSE a.txt[root@svr7 ~]# mv /opt/a.txt /opt/b.txt //将文件改名/opt/ MOVED_FROM a.txt/opt/ MOVED_TO b.txt
3)结束inotifywait监控
杀死当前用户的第一个后台任务:
[root@svr7 ~]# kill -9 %1[1]+ Killed inotifywait -mrq /opt
案例:rsync基本用法
问题
本例要求掌握远程同步的基本操作,使用rsync命令完成下列任务:
-
将目录 /boot 同步到目录 /todir 下
-
将目录 /boot 下的文档同步到目录 /todir 下
-
在目录 /boot 下新增文件 a.txt,删除 /todir 下的子目录 grub2,再次同步使 /todir 与 /boot 一致
-
验证 -a、-n、-v、--delete 选项的含义
方案
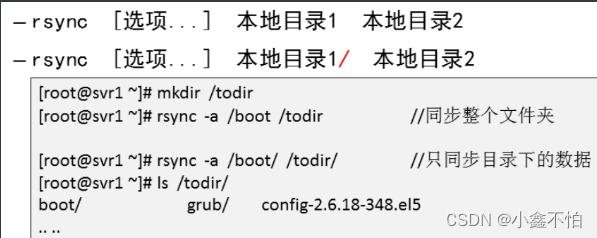
本地同步操作:
-
rsync [选项...] 本地目录1 本地目录2
-
rsync [选项...] 本地目录1/ 本地目录2
rsync同步工具的常用选项:
-
-n:测试同步过程,不做实际修改
-
--delete:删除目标文件夹内多余的文档
-
-a:归档模式,相当于-rlptgoD
-
-v:显示详细操作信息
-
-z:传输过程中启用压缩/解压
-
-X :不改变ACL策略
步实现此案例需要按照如下步骤进行。
步骤一:rsync同步基本操作
1)将目录 /boot 同步到目录 /todir 下
[root@svr7 ~]# ls -l /todir //同步前ls: 无法访问/todir: 没有那个文件或目录[root@svr7 ~]# rsync -a /boot /todir //将目录1作为目录2的子目录[root@svr7 ~]# ls -l /todir //检查同步结果总用量 4dr-xr-xr-x. 4 root root 4096 11月 30 18:50 boot
2)将目录 /boot 下的文档同步到目录 /todir 下
[root@svr7 ~]# rm -rf /todir //清理掉目录2[root@svr7 ~]# rsync -a /boot/ /todir //将目录1下的文档同步到目录2下[root@svr7 ~]# ls -l /todir //检查同步结果总用量 126708-rw-r--r--. 1 root root 126426 10月 30 2015 config-3.10.0-327.el7.x86_64drwxr-xr-x. 2 root root 4096 11月 30 18:50 extlinuxdrwx------. 6 root root 104 12月 9 09:58 grub2.. ..
3)同步效果测试
在目录/boot下新增文件a.txt,删除/todir下的子目录 grub2:
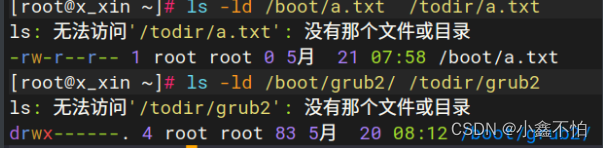
[root@svr7 ~]# touch /boot/a.txt[root@svr7 ~]# rm -rf /todir/grub2/

现在目录/boot和/todir目录下的内容已经不一致了:
[root@svr7 ~]# ls -ld /boot/a.txt /todir/a.txtls: 无法访问/todir/a.txt: 没有那个文件或目录-rw-r--r--. 1 root root 0 1月 11 21:09 /boot/a.txt[root@svr7 ~]# ls -ld /boot/grub2 /todir/grub2ls: 无法访问/todir/grub2: 没有那个文件或目录drwx------. 6 root root 104 12月 9 09:58 /boot/grub2
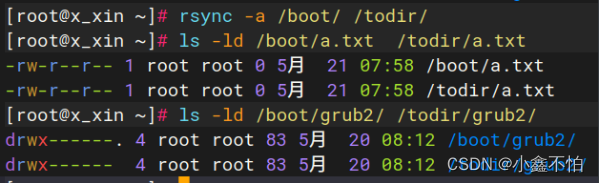
再次同步使/todir与/boot一致:
[root@svr7 ~]# rsync -a /boot/ /todir/
确认同步结果:
[root@svr7 ~]# ls -ld /boot/a.txt /todir/a.txt-rw-r--r--. 1 root root 0 1月 11 21:09 /boot/a.txt-rw-r--r--. 1 root root 0 1月 11 21:09 /todir/a.txt[root@svr7 ~]# ls -ld /boot/grub2 /todir/grub2drwx------. 6 root root 104 12月 9 09:58 /boot/grub2drwx------. 6 root root 104 12月 9 09:58 /todir/grub2
步骤二:验证 -a、-v、-n、--delete 选项的含义
1)验证-a选项
当目录1包含文件夹时,若缺少-a或-r选项则文件夹会被忽略:
[root@svr7 ~]# rsync /home /testaskipping directory home[root@svr7 ~]# ls -ld /testals: 无法访问/testa: 没有那个文件或目录
添加-a后才会执行同步:
[root@svr7 ~]# rsync -a /home/ /testa[root@svr7 ~]# ls -ld /testadrwxr-xr-x. 4 root root 31 1月 6 17:33 /testa
类似的情况,当目录1中的数据出现权限、归属、修改时间等变化时,若文件内容不变默认不会同步,若希望目录2也同步这些变化,也需要-a选项。
2)验证-v选项
创建测试目录及文档:
[root@svr7 ~]# mkdir /fdir[root@svr7 ~]# touch /fdir/1.txt
添加-v选项时,可以看到操作细节信息,比如第一次同步时:
[root@svr7 ~]# rsync -av /fdir/ /tdirsending incremental file listcreated directory /tdir./1.txt //传输文档列表sent 82 bytes received 34 bytes 232.00 bytes/sectotal size is 0 speedup is 0.00
在目录/fdir/添加文件2.txt,再次跟踪同步信息:
[root@svr7 ~]# touch /fdir/2.txtsending incremental file list./2.txt //传输文档列表sent 100 bytes received 34 bytes 268.00 bytes/sectotal size is 0 speedup is 0.00
确认目录1和目录2的内容已经一致:
[root@svr7 ~]# ls /fdir/ /tdir//fdir/:1.txt 2.txt/tdir/:1.txt 2.txt
再次跟踪同步信息,已经无需传输文件:
[root@svr7 ~]# rsync -av /fdir/ /tdirsending incremental file listsent 58 bytes received 12 bytes 140.00 bytes/sectotal size is 0 speedup is 0.00
3)验证-n选项
将-n、-v选项合用,可以模拟同步过程,显示需要做哪些操作(但并不真的同步)。
在目录/fdir下新建文件3.txt,测试同步操作:
[root@svr7 ~]# touch /fdir/3.txt[root@svr7 ~]# rsync -avn /fdir/ /tdir/sending incremental file list./3.txt //提示同步时会传输哪些文件sent 78 bytes received 18 bytes 192.00 bytes/sectotal size is 0 speedup is 0.00 (DRY RUN)[root@svr7 ~]# ls -l /tdir/3.txt //但实际并未真的同步ls: 无法访问/tdir/3.txt: 没有那个文件或目录
去掉-n选项才会真正同步:
[root@svr7 ~]# rsync -av /fdir/ /tdir/sending incremental file list./3.txtsent 114 bytes received 34 bytes 296.00 bytes/sectotal size is 0 speedup is 0.00[root@svr7 ~]# ls -l /tdir/3.txt-rw-r--r--. 1 root root 0 1月 11 21:46 /tdir/3.txt
4)验证--delete选项
rsync同步操作默认只是将目录1的数据同步到目录2,但如果目录2存在多余的文件却并不会去除,除非添加—delete选项。
在目录/fdir、/tdir已经完成同步后,删除/tdir/2.txt文件,再次同步:
[root@svr7 ~]# rm -rf /fdir/2.txt [root@svr7 ~]# rsync -a /fdir/ /tdir/
检查发现目标文件夹/tdir下的2.txt文件还在:
[root@svr7 ~]# ls /fdir/ /tdir//fdir/:1.txt 3.txt/tdir/:1.txt 2.txt 3.txt
这种情况下添加--delete选项再次执行同步,两个目录的内容就一致了:
[root@svr7 ~]# rsync -a --delete /fdir/ /tdir/[root@svr7 ~]# ls /fdir/ /tdir//fdir/:1.txt 3.txt/tdir/:1.txt 3.txtv
案例:rsync+SSH同步
问题
本例要求掌握rsync与远程SSH资源的同步操作,使用rsync命令访问远程主机svr7,完成下列任务:
-
查看远程主机的 / 目录下有哪些子目录
-
从远程主机下载 /etc/passwd 文件到当前目录
-
将远程主机的 /boot/ 目录同步为本地的 /fromssh
-
将本机的 /etc 目录同步到远程主机的 /opt/下
方案
列出 SSH 服务端资源
-
rsync user@host:远程目录/
rsync+SSH远程同步操作:
-
rsync [...] user@host:远程目录 本地目录
-
rsync [...] 本地目录 user@host:远程目录
步骤
实现此案例需要按照如下步骤进行。
步骤一:列出远程主机的SSH资源
查看远程主机svr7的/目录下有哪些子目录:
[root@pc207 ~]# rsync root@192.168.4.7:/root@192.168.4.7's password: //验证对方的密码dr-xr-xr-x 4096 2016/12/15 10:39:34 .lrwxrwxrwx 7 2016/12/07 09:21:50 binlrwxrwxrwx 7 2016/12/07 09:21:50 liblrwxrwxrwx 9 2016/12/07 09:21:50 lib64lrwxrwxrwx 8 2016/12/07 09:21:50 sbindr-xr-xr-x 4096 2016/12/07 11:25:29 bootdrwxr-xr-x 6 2016/12/07 09:21:14 datadrwxr-xr-x 3200 2016/12/15 10:46:15 devdrwxr-xr-x 8192 2016/12/20 17:01:02 etc
步骤二:rsync+SSH同步操作
1)从远程主机svr7下载/etc/passwd文件到当前目录
[root@pc207 ~]# rsync root@192.168.4.7:/etc/passwd ./root@192.168.4.7's password: //验证对方的密码[root@pc207 ~]# cat passwd //检查同步结果root:x:0:0:root:/root:/bin/bashbin:x:1:1:bin:/bin:/sbin/nologindaemon:x:2:2:daemon:/sbin:/sbin/nologinadm:x:3:4:adm:/var/adm:/sbin/nologinlp:x:4:7:lp:/var/spool/lpd:/sbin/nologin.. ..
2)将远程主机svr7的/boot/目录同步为本地的/fromssh
[root@pc207 ~]# rsync -a root@192.168.4.7:/boot/ /fromsshroot@192.168.4.7's password: //验证对方的密码[root@pc207 ~]# ls /fromssh/ //检查同步结果config-3.10.0-327.el7.x86_64extlinuxgrub2initramfs-0-rescue-a19921505cc7e19d20dfcd5cea7d8aa2.imginitramfs-3.10.0-327.el7.x86_64.imginitramfs-3.10.0-327.el7.x86_64kdump.img.. ..
3)将本机的/etc目录同步到远程主机svr7的/opt/下
确认目录大小:
[root@pc207 ~]# du -sh /etc35M /etc
上行同步到远程主机svr7上:
[root@pc207 ~]# rsync -a /etc root@192.168.4.7:/opt/root@192.168.4.7's password:
在远程主机上检查同步结果:
[root@svr7 ~]# du -sh /opt/etc35M /opt/etc
案例:使用inotifywait工具
问题
本例要求安装inotify-tools工具,并针对文件夹 /opt 启用 inotifywait 监控,完成下列任务:
-
当此目录下出现新建、修改、更改权限、删除文件等事件时能给出提示
-
验证上述监控事件的效果
方案
inotifywait监控操作:
-
inotifywait [选项] 目标文件夹
inotifywait常用命令选项:
-
-m,持续监控(捕获一个事件后不退出)
-
-r,递归监控、包括子目录及文件
-
-q,减少屏幕输出信息
-
-e,指定监视的 modify、move、create、delete、attrib 等事件类别
步骤
实现此案例需要按照如下步骤进行。
步骤一:安装inotify-tools软件包
1)解包
[root@svr7 ~]# tar xf inotify-tools-3.13.tar.gz -C /usr/src/
2)配置
[root@svr7 ~]# cd /usr/src/inotify-tools-3.13/[root@svr7 inotify-tools-3.13]# ./configure
3)编译
[root@svr7 inotify-tools-3.13]# make
4)安装
[root@svr7 inotify-tools-3.13]# make install
5)检查安装结果(inotifywait程序可用)
[root@svr7 ~]# inotifywait --helpinotifywait 3.13Wait for a particular event on a file or set of files.Usage: inotifywait [ options ] file1 [ file2 ] [ file3 ] [ ... ]Options:-h|--help Show this help text... ..
步骤二:测试inotifywait监控
1)开启监控任务,置入后台
[root@svr7 ~]# inotifywait -mrq -e create,modify,move,attrib,delete /opt &[1] 55564
2)测试/opt/目录下的新建、修改、改名、更改权限、删除文件等事件的响应消息
观察新建文件时的监控信息:
[root@svr7 ~]# touch /opt/a.txt/opt/ CREATE a.txt/opt/ ATTRIB a.txt
观察修改文件内容时的监控信息:
[root@svr7 ~]# echo Hello > /opt/a.txt[root@svr7 ~]# /opt/ MODIFY a.txt/opt/ MODIFY a.txt
观察将文件改名时的监控信息:
[root@svr7 ~]# mv /opt/a.txt /opt/b.txt/opt/ MOVED_FROM a.txt/opt/ MOVED_TO b.txt
观察修改文件权限时的监控信息:
[root@svr7 ~]# chmod 600 /opt/b.txt/opt/ ATTRIB b.txt
观察删除文件时的监控信息:
[root@svr7 ~]# rm -rf /opt/b.txt /opt/ DELETE b.txt
3)停止监控任务
[root@svr7 ~]# kill -9 %1[1]+ 已杀死 inotifywait -mr -e create,modify,move,attrib,delete /opt
相关文章:
源码编译安装Rsync数据同步
源码编译安装 RPM软件包:rpm -ivh 或者 yum -y install 需要开发编译工具gcc、gcc-c、make等... 源码包----开发工具gcc与make----》可以执行的程序-----》运行安装 •主要优点 –获得软件的最新版,及时修复bug –软件功能可按需选择/定制ÿ…...
SQL Server2019安装步骤教程(图文)_最新教程
一、下载SQL Server2019 1.到微软官网下载SQL Server Developer版本,官网当前的2019版本下载需要注册账号。 不想注册的朋友,可以选择从网盘下载:点击此处直接下载 2.下载之后先解压,解压后执行exe安装程序。打开之后的界面如下…...

【SpringBoot】SpringBoot中防止接口重复提交(单机环境和分布式环境)
📝个人主页:哈__ 期待您的关注 目录 🌼前言 🔒单机环境下防止接口重复提交 📕导入依赖 📂项目结构 🚀创建自定义注解 ✈创建AOP切面 🚗创建Conotroller 💻分布…...
)
零基础学Java(全170集)
课程概述 本课程旨在全面深化对 Java 语言的核心技术理解,并提升编程实践能力。课程内容涵盖以下关键领域: 掌握Java核心语法,为后续学习打下扎实的基础。熟练运用Java常用的类库与开发工具,提高开发效率与质量。解决面向对象编…...

摄像头应用测试
作者简介: 一个平凡而乐于分享的小比特,中南民族大学通信工程专业研究生在读,研究方向无线联邦学习 擅长领域:驱动开发,嵌入式软件开发,BSP开发 作者主页:一个平凡而乐于分享的小比特的个人主页…...

Golang框架HTTP客户端框架zdpgo_resty发送表单请求
核心代码 这里通过字典传递了一个简单的表单数据。 发送的是POST请求。 resp, err : client.R().SetFormData(map[string]string{"username": "jeeva","password": "mypass",}).Post("http://127.0.0.1:3333/login")fmt.P…...
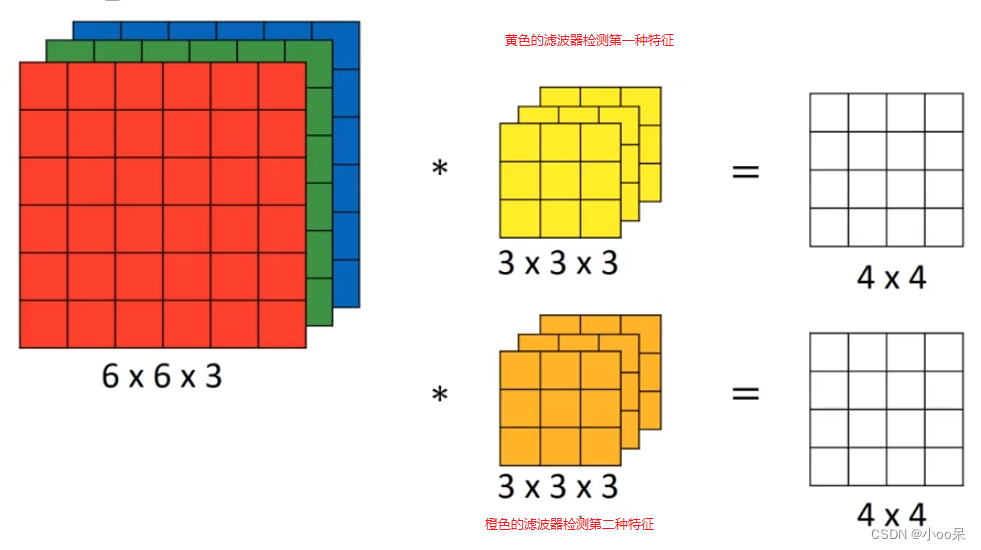
【机器学习300问】99、多通道卷积神经网络在卷积操作时有哪些注意事项?
一、多通道卷积神经网络示例 还是以图像处理为例,如果你的目标不仅是分析灰度图像特性,还打算捕捉RGB彩色图像的特征。如下图,当面对一张66像素的彩色图像时,提及的“3”实际上是指红、绿、蓝三种颜色通道,形象地说&am…...

Rust之函数、单元测试
1、函数 类似于C函数。 1.1、普通函数 在Rust中,函数的定义使用fn关键字,后跟函数名、参数列表、返回类型和函数体。函数体由一系列语句组成,用于执行特定的操作和计算。 函数定义: 使用fn关键字定义函数,函数由函数…...

Linux环境下TensorFlow安装教程
TensorFlow是学习深度学习时常用的Python神经网络框 下面以Mask R-CNN 的环境配置为例: 首先进入官网:www.tensorflow.org TensorFlow安装的总界面: 新建anaconda虚拟环境: conda create -n envtf2 python3.8 (Pyth…...

基于Open3D的点云处理19-模拟生成点云
如果没有设备,怎么得到点云进行学习研究呢,一般通过以下方法: 模型采样+增加噪声:简单方便,但结果比较理想与真实扫描不一致;光线投射:简单方便,可以模仿传感器的一个扫描视角Blensor点云仿真:能够模仿传感器本身的一些噪声,适合激光雷达和tof相机的仿真,传感器较少…...
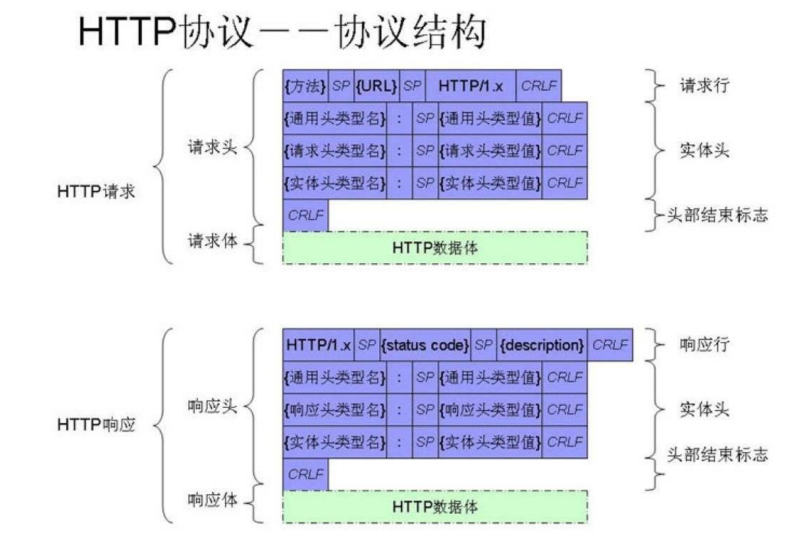
安全分析[1]之网络协议脆弱性分析
文章目录 威胁网络安全的主要因素计算机网络概述网络体系结构 网络体系结构脆弱性分组交换认证与可追踪性尽力而为匿名与隐私对全球网络基础实施的依赖无尺度网络互联网的级联特性中间盒子 典型网络协议脆弱性IP协议安全性分析IPSec(IP Security)IPv6问题 ICMP协议安…...
)
数据湖对比(hudi,iceberg,paimon,Delta)
Delta 数据湖 Delta 更新原理 update/delete/merge 实现均基于spark的join功能。 定位 做基于spark做流批一体的数据处理 缺点 本质为批处理。强绑定spark引擎。整体性能相较其他数据湖比较差 hudi 数据湖 hudi 更新原理 通过hudi自定义的主键索引hoodiekey 布隆过…...
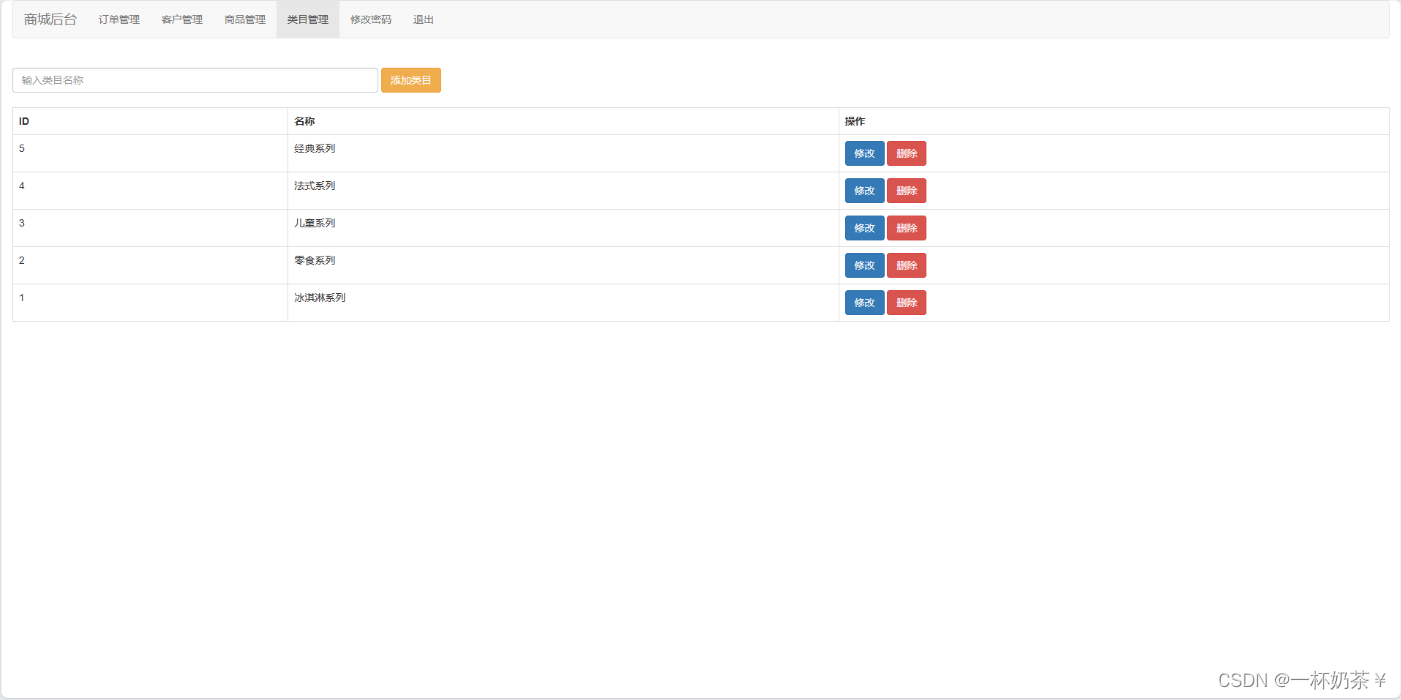
基于ssm的蛋糕商城系统java项目jsp项目javaweb
文章目录 蛋糕商城系统一、项目演示二、项目介绍三、系统部分功能截图四、部分代码展示五、底部获取项目源码(9.9¥带走) 蛋糕商城系统 一、项目演示 蛋糕商城管理系统 二、项目介绍 系统角色 : 管理员、用户 一,管理员 管理员有…...

vue3父组件使用ref获取子组件的属性和方法
在vue3中父组件访问子组件中的属性和方法是需要借助于ref: 1.<script setup> 中定义响应式变量 例如: const demo1 ref(null) 2.在引入的子组件标签上绑定ref属性的值与定义的响应式变量同名( <demo1 ref"demo1"/>)。 父组件代码如下&…...

加入MongoDB AI创新者计划,携手MongoDB共同开创AI新纪元
加入MongoDB AI创新者计划! MongoDB对AI创新和初创企业的支持既全面又广泛!无论您是领先的AI初创企业还是刚刚起步,MongoDB Atlas都是支持您愿景的最佳平台。 AI 初创者计划The AI Startup Track AI初创者计划为早期初创企业提供专属福利&…...

3. CSS的色彩与背景
3.1 CSS3中的色彩 CSS3扩展了颜色的定义方式,使得开发者能够使用更多样化和灵活的颜色表达方式。这包括RGB、RGBA、HSL、HSLA等格式,以及支持透明度和渐变的特性。 3.1.1 颜色格式 十六进制颜色 十六进制颜色是最常用的颜色表示法,以#开头…...
MiniCPM-Llama3-V-2_5-int4
MiniCPM-Llama3-V-2_5-int4大模型部署使用环境: python3.8cuda11.8其它要求,按照安装文档要求下载即可 我是在算力平台用4090跑的, GPU 显存(8GB)可以部署推理 int4 量化版本,如果推理非量化版本需要更高显…...
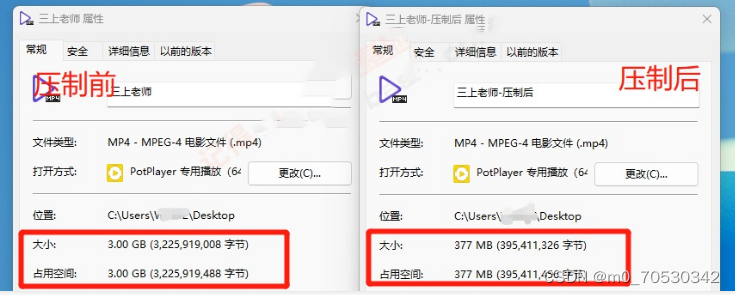
压缩能力登顶 小丸工具箱 V1.0 绿色便携版
平常录制视频或下载保存的视频时长往往都很长,很多时候都想要裁剪、 截取出一些“精华片段”保留下来,而不必保存一整个大型视频那么浪费硬盘空间… 但如今手机或电脑上大多数的视频剪辑软件,切割视频一般都要等待很长时间导出或转换&#…...

电子电器架构 - 车载网管功能简介
电子电器架构 - 车载网管功能简介 我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 屏蔽力是信息过载时代一个人的特殊竞争力,任何消耗你的人和事,多看一眼都是你的不对。非必要不费力证明自己,…...

路由配置总结
在 Vue 中,一级路由和二级路由的配置主要依赖于 vue-router 插件。以下是关于一级路由和二级路由配置的总结: 一、安装 vue-router 你可以通过 npm 或 yarn 来安装 vue-router。在命令行中运行以下命令: 使用 npm: npm install vue-router…...
,锁定雾浓度≤0.38的7个关键阈值参数)
【云雾效果商业级交付标准】:基于Adobe Sensei图像雾度分析报告(N=1,247张MJ生成图),锁定雾浓度≤0.38的7个关键阈值参数
更多请点击: https://intelliparadigm.com 第一章:云雾效果商业级交付标准的定义与行业意义 云雾效果在现代数字体验中已超越视觉装饰范畴,成为空间感知建模、沉浸式交互与品牌情绪传达的核心媒介。商业级交付标准并非仅关注“是否可见雾气”…...

XZ6128A工作电压5-100V 输出电流5A 升压型大功率LED灯恒流驱动控制芯片
概述 XZ6128A是一款高效率、高精度的升压型大功率LED灯恒流驱动控制芯片。 XZ6128A内置高精度误差放大器,固定关断时间控制电路,恒流驱动电路等,特别适合大功率、多个高亮度LED灯串的恒流驱动。 XZ6128A采用固定关断时间的控制方式࿰…...

别再盲调temperature=0.2!DeepSeek补全效果突变的4个隐藏参数,资深架构师压箱底调参清单
更多请点击: https://intelliparadigm.com 第一章:别再盲调temperature0.2!DeepSeek补全效果突变的4个隐藏参数,资深架构师压箱底调参清单 DeepSeek-R1/VL 等开源大模型在实际部署中,仅靠调节 temperature 往往收效甚…...

大厂校招变了:AI 能力正在进入笔试和面试
最近不少同学投递校招时,应该已经发现一个变化: 以前 JD 里写的是“熟悉 Python / Java / SQL / Office 优先”。 现在越来越多岗位开始出现新的描述: “熟练使用 AI 工具者优先” “了解大模型应用者优先” “具备 AI 辅助编程经验优先” “…...

VideoDownloadHelper终极指南:解锁浏览器视频下载的完整解决方案
VideoDownloadHelper终极指南:解锁浏览器视频下载的完整解决方案 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper 还在为无法保存网…...

语音AI落地最后一公里卡点,PlayAI质量波动真相:采样率适配缺陷、韵律断层、情感衰减三大隐性陷阱
更多请点击: https://intelliparadigm.com 第一章:PlayAI语音质量评测报告总览 PlayAI语音质量评测体系基于客观指标与主观听感双维度构建,覆盖清晰度、自然度、时延、抗噪性及情感一致性五大核心能力。本报告汇总了在标准测试集(…...

为什么选择Espresso?5大优势让快递管理变得前所未有的简单[特殊字符]
为什么选择Espresso?5大优势让快递管理变得前所未有的简单🚀 【免费下载链接】Espresso 🚚 Espresso is an express delivery tracking app designed with Material Design style, built on MVP(Model-View-Presenter) architecture with RxJ…...

KMS智能激活工具:如何一键永久激活Windows和Office的完整指南
KMS智能激活工具:如何一键永久激活Windows和Office的完整指南 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为Windows和Office激活问题而烦恼吗?每次系统重装后都要…...

如何精准识别区域内的产学研合作机会?
核心要点 产学研精准对接的核心矛盾在于供需两端“底数不清”,必须用产业知识图谱对企业技术家底做CT扫描,再以持证技术经纪人入企二次挖掘,才能将模糊的升级意愿转化为可决策的结构化需求。告别“签完即凉”的致命伤,关键不是办更…...

3分钟快速修复洛雪音乐播放问题:六音音源完整指南
3分钟快速修复洛雪音乐播放问题:六音音源完整指南 【免费下载链接】New_lxmusic_source 六音音源修复版 项目地址: https://gitcode.com/gh_mirrors/ne/New_lxmusic_source 你是否曾经在升级洛雪音乐后,发现心爱的歌单突然变成了灰色,…...