嵌入式进阶——舵机控制PWM
🎬 秋野酱:《个人主页》
🔥 个人专栏:《Java专栏》《Python专栏》
⛺️心若有所向往,何惧道阻且长
文章目录
- 舵机信号线
- 代码示例
- 初始化PWM
- 初始化UART打印日志
- 初始化外部中断Exti
- main函数
舵机最早用于船舶上实现转向功能,由于可以通过程序连续控制其转角,因而被广泛应用于智能小车转向以及机器人各类关节中.
工作电压:3V-7.2V(取决于具体型号)
工作电流:100mA(取决于具体型号)

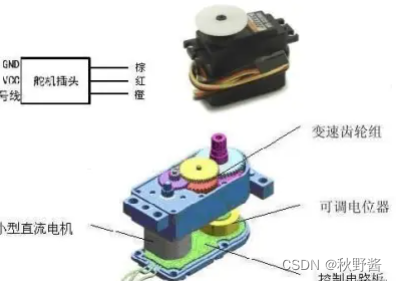
舵机由直流电机、减速齿轮组、传感器和控制电路组成的一套自动控制系统.通过发送信号,指定输出轴旋转角度.舵机一般而言都有最大旋转角度(比如180度)
与普通直流电机的区别:
● 直流电机是一圈圈转动的
● 舵机智能在一定角度内转动,不能一圈圈转动
● 普通的直流电机无法反馈转动的角度信息,而舵机可以
用途也不相同:
● 普通直流电机一般是整圈转动做动力用
● 舵机是控制某物体转动一定角度用(比如机器人的关节)
舵机信号线
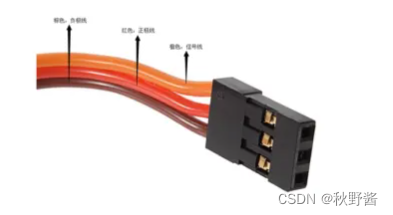
舵机的主要组成部分为伺服电机,所谓伺服就是服从信号的要求而动作。在信号来之前,转子停止不动;信号来到之后,转子立即运动。因此我们就可以给舵机输入不同的信号,来控制其旋转到不同的角度。 舵机接收的是PWM信号,当信号进入内部电路产生一个偏置电压,触发电机通过减速齿轮带动电位器移动,使电压差为零时,电机停转,从而达到伺服的效果。简单来说就是给舵机一个特定的PWM信号,舵机就可以旋转到指定的位置。 舵机上有三根线,分别是GND(棕线)、VCC(红线)和SIG(橙线),也就是地线、电源线和信号线,其中的PWM波就是从信号线输入给舵机的。
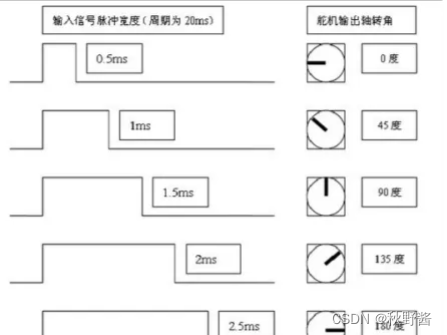
一般来说,舵机接收的PWM信号频率为50HZ,即周期为20ms。当高电平的脉宽在0.5ms-2.5ms之间时舵机就可以对应旋转到不同的角度。如下图。

代码示例
以P01对应的PWM6为例
配置PWM环境,这里需要使用修改后的,支持分频系数的PWM依赖库:
初始化PWM
#include "config.h"
#include "delay.h"
#include "GPIO.h"
#include "PWM.h"
#include "UART.h"
#include "Exti.h"
#include <stdio.h>char putchar(char dat)
{TX1_write2buff(dat);return dat;
}#define MOTOR P01// 分频系数:可以是1~65535中的任意值
#define Prescaler 10// 频率
#define PREQ 50// 保证分母 >= 367
#define PERIOD (MAIN_Fosc / (PREQ * Prescaler))void GPIO_config(void)
{GPIO_InitTypeDef GPIO_InitStructure; // 结构定义GPIO_InitStructure.Pin = GPIO_Pin_1; // 指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; // 指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P0, &GPIO_InitStructure); // 初始化GPIO_InitStructure.Pin = GPIO_Pin_2; // 指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; // 指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P3, &GPIO_InitStructure); // 初始化
}void PWM_config(void)
{PWMx_InitDefine PWMx_InitStructure;// 总配置// (MAIN_Fosc / 1000) - 1 周期计数值// 配置分频系数,必须使用改进后的PWM.h和PWM.C文件PWMx_InitStructure.PWM_Prescaler = Prescaler - 1;PWMx_InitStructure.PWM_Period = PERIOD - 1; // 周期时间, 0~65535PWMx_InitStructure.PWM_DeadTime = 0; // 死区发生器设置, 0~255PWMx_InitStructure.PWM_EnoSelect = ENO6P; // 输出通道选择, ENO1P,ENO1N,ENO2P,ENO2N,ENO3P,ENO3N,ENO4P,ENO4N / ENO5P,ENO6P,ENO7P,ENO8PPWMx_InitStructure.PWM_PS_SW = PWM6_SW_P01; // 切换端口// 具体PWM端口配置// pwm6PWMx_InitStructure.PWM6_Mode = CCMRn_PWM_MODE1; // 模式, CCMRn_FREEZE,CCMRn_MATCH_VALID,CCMRn_MATCH_INVALID,CCMRn_ROLLOVER,CCMRn_FORCE_INVALID,CCMRn_FORCE_VALID,CCMRn_PWM_MODE1,CCMRn_PWM_MODE2PWMx_InitStructure.PWM6_Duty = 0; // PWM4占空比时间, 0~Period// pwm6PWMx_InitStructure.PWM_CC6Enable = ENABLE; // 开启PWM6P输入捕获/比较输出, ENABLE,DISABLE// PWM启动配置PWMx_InitStructure.PWM_MainOutEnable = ENABLE; // 主输出使能, ENABLE,DISABLEPWMx_InitStructure.PWM_CEN_Enable = ENABLE; // 使能计数器, ENABLE,DISABLEPWM_Configuration(PWMB, &PWMx_InitStructure); // 初始化PWM, PWMA,PWMB
}初始化UART打印日志
void UART_config(void)
{COMx_InitDefine COMx_InitStructure; // 结构定义COMx_InitStructure.UART_Mode = UART_8bit_BRTx; // 模式, UART_ShiftRight,UART_8bit_BRTx,UART_9bit,UART_9bit_BRTxCOMx_InitStructure.UART_BRT_Use = BRT_Timer1; // 选择波特率发生器, BRT_Timer1, BRT_Timer2 (注意: 串口2固定使用BRT_Timer2)COMx_InitStructure.UART_BaudRate = 115200ul; // 波特率, 一般 110 ~ 115200COMx_InitStructure.UART_RxEnable = ENABLE; // 接收允许, ENABLE或DISABLECOMx_InitStructure.BaudRateDouble = DISABLE; // 波特率加倍, ENABLE或DISABLECOMx_InitStructure.UART_Interrupt = ENABLE; // 中断允许, ENABLE或DISABLECOMx_InitStructure.UART_Priority = Priority_0; // 指定中断优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3COMx_InitStructure.UART_P_SW = UART1_SW_P30_P31; // 切换端口, UART1_SW_P30_P31,UART1_SW_P36_P37,UART1_SW_P16_P17,UART1_SW_P43_P44UART_Configuration(UART1, &COMx_InitStructure); // 初始化串口1 UART1,UART2,UART3,UART4
}
初始化外部中断Exti
用于监听按钮P32的按下事件
void Exti_config(void)
{EXTI_InitTypeDef Exti_InitStructure; // 结构定义Exti_InitStructure.EXTI_Interrupt = ENABLE; // 中断使能, ENABLE或DISABLEExti_InitStructure.EXTI_Mode = EXT_MODE_Fall; // 中断模式, EXT_MODE_RiseFall,EXT_MODE_FallExti_InitStructure.EXTI_Priority = Priority_0; // 中断使能, ENABLE或DISABLEExt_Inilize(EXT_INT0, &Exti_InitStructure); // 初始化
}
处理按钮按下事件
u16 duty_percent = 500; // 500us -> 2500us
void ext_int0_call()
{static int step = 500;float angle = 0;PWMx_Duty duty;// 500 -> 0°// 1000 -> 45°// 1500 -> 90°// 2000 -> 135°// 2500 -> 180°delay_ms(10);if (P32){// 延时10ms后,依然低电平,才执行。消除抖动return;}// 修改占空比 0 -> 100duty_percent += step;if (duty_percent >= 2500){step = -500;}else if (duty_percent <= 500){step = 500;}// 计算不同的占空比对应的角度值,用于打印angle = (duty_percent - 500) * 180.0f / 2000;printf("duty_percent: %d angle: %.1f \r\n", (int)duty_percent, angle);// 设置占空比duty.PWM6_Duty = PERIOD * duty_percent / 20000;UpdatePwm(PWMB, &duty);
}
main函数
void main()
{PWMx_Duty duty;GPIO_config();UART_config();PWM_config();Exti_config();EA = 1;P32 = 1;duty.PWM6_Duty = PERIOD * duty_percent / 20000;UpdatePwm(PWMB, &duty);while (1){delay_ms(10);}
}
相关文章:
嵌入式进阶——舵机控制PWM
🎬 秋野酱:《个人主页》 🔥 个人专栏:《Java专栏》《Python专栏》 ⛺️心若有所向往,何惧道阻且长 文章目录 舵机信号线代码示例初始化PWM初始化UART打印日志初始化外部中断Extimain函数 舵机最早用于船舶上实现转向功能,由于可以通过程序连…...

Java实现抢红包算法——详细注释,标准语法
package learn;import java.math.BigDecimal; import java.util.ArrayList; import java.util.List; import java.util.Random;public class RobRedPacket {// 发红包算法,金额参数以分为单位public static List<Integer> divideRedPacket(Integer totalAmoun…...
【优选算法】位运算 {位运算符及其优先级;位运算的应用:判断位,打开位,关闭位,转置位,位图,get lowbit,close lowbit;相关编程题解析}
一、位运算符及其优先级 我们知道,计算机中的数在内存中都是以二进制形式进行存储的 ,而位运算就是直接对整数在内存中的二进制位进行操作,因此其执行效率非常高,在程序中尽量使用位运算进行操作,这会大大提高程序的性…...

服务器数据恢复—服务器正常断电重启后raid信息丢失的数据恢复案例
服务器数据恢复环境: 一台某品牌DL380 G4服务器,服务器通过该服务器品牌smart array控制器挂载了一台国产的磁盘阵列,磁盘阵列中有一组由14块SCSI硬盘组建的RAID5。服务器安装LINUX操作系统,搭建了NFSFTP,作为内部文件…...

如何理解kmp的套娃式算法啊?
概念 KMP算法,全称Knuth Morris Pratt算法 。文章大部分内容出自《数据结构与算法之美》 核心思想 假设主串是a,模式串是b 在模式串与主串匹配的过程中,当遇到不可匹配的字符的时候,对已经对比过的字符,是否能找到…...

python中树的运用样例
目录 一、文件系统样例 二、Trie树 一、文件系统样例 class FileNode:def __init__(self, name, is_fileFalse):self.name nameself.is_file is_fileself.children []def add_child(self, child):self.children.append(child)# 创建文件系统结构 root FileNode("roo…...
C++学习/复习5--构造函数与初始化/static成员/友元/内部类/匿名对象/编译器的拷贝构造优化
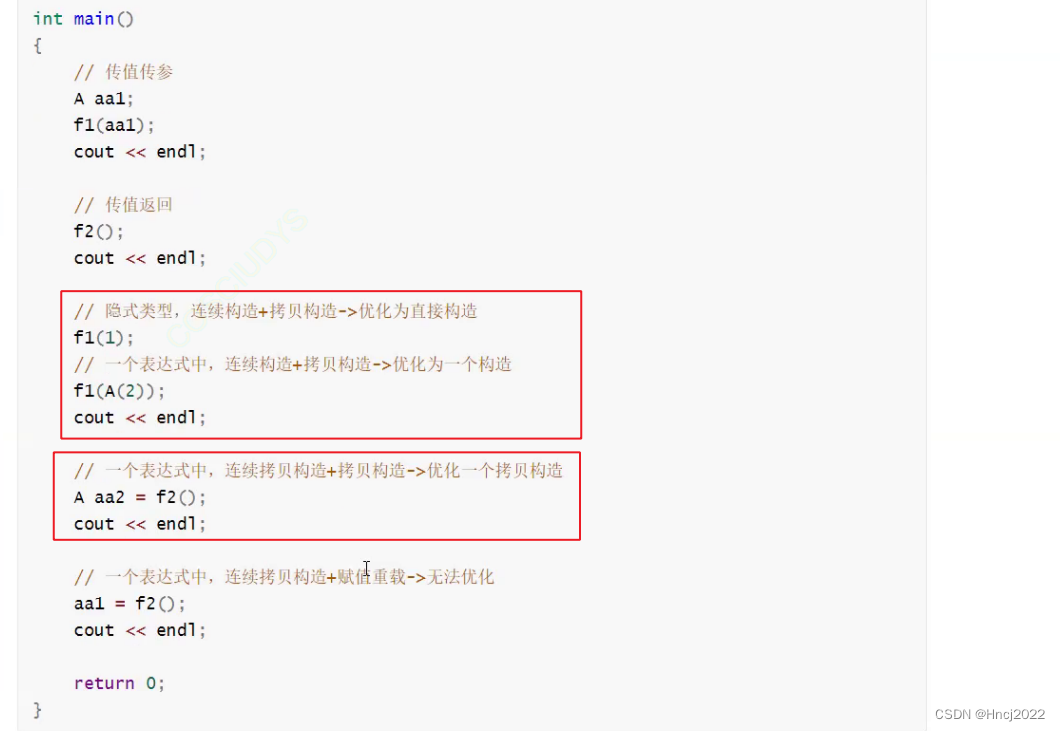
一、本章概要 二、再谈构造函数 1.构造体赋初值与初始化 2.初始化列表与初始化 2.1定义 2.2注意事项与举例 3.explicit关键字与构造函数 3.1隐式类型转换 也叫做自动类型转换 这种转换通常是从存储范围小的类型到存储范围大的类型,或者是从低精度的数值类型到高…...

数学建模--LaTeX基本介绍和入门
1.引言 (1)上次我们介绍到了我们这个团队第一次参加这个数学建模比赛,就是这个电工杯,我是一名论文手,我们在这个下午也是对于这个比赛过程中出现的问题做了相应的分析,每个人也是进行了反思,知…...
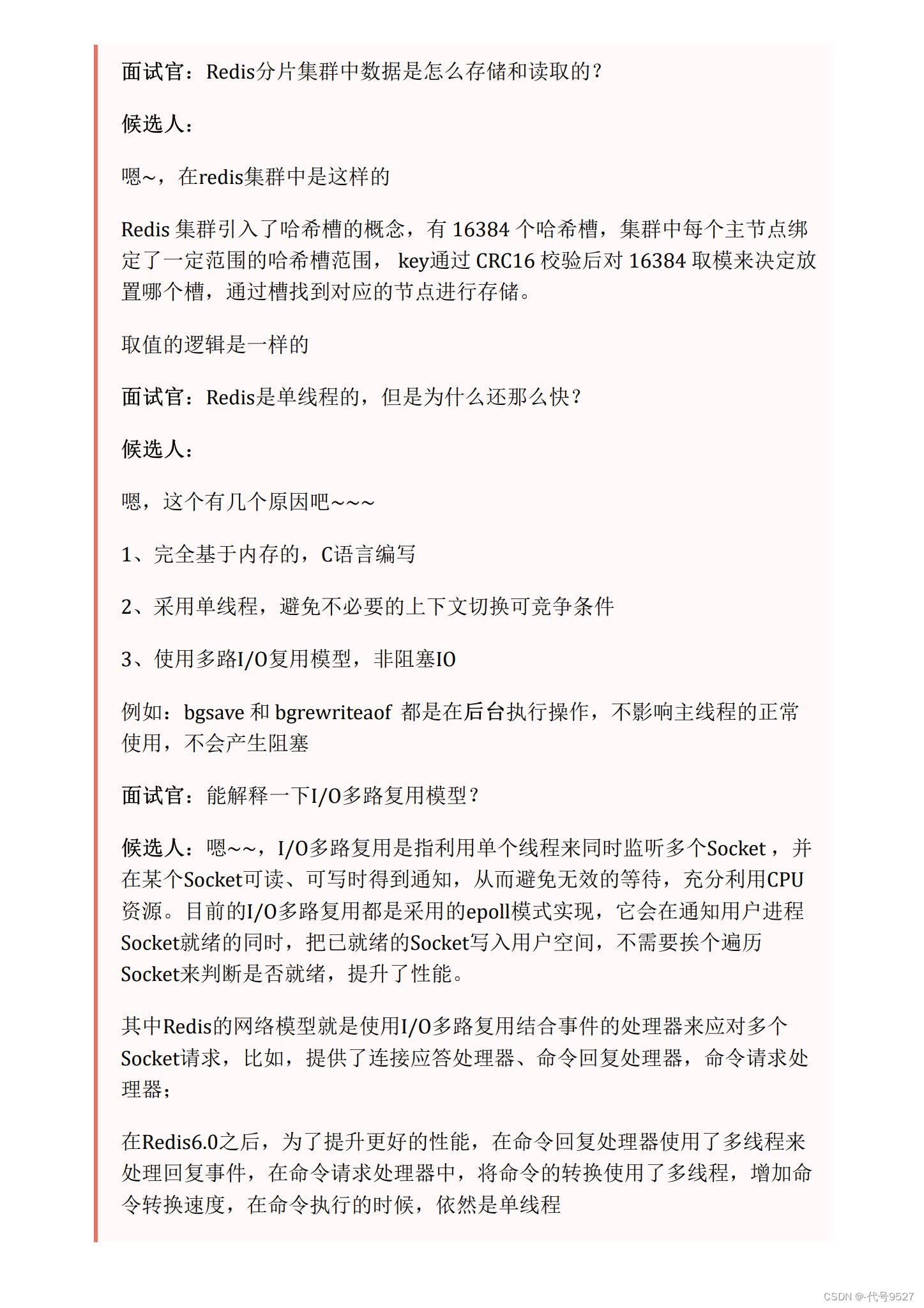
【Java面试】二、Redis篇(中)
文章目录 1、Redis持久化1.1 RDB1.2 AOF1.3 RDB与AOF的对比 2、数据过期策略(删除策略)2.1 惰性删除2.2 定期删除 3、数据淘汰策略4、主从复制4.1 主从全量同步4.2 增量同步 5、哨兵模式5.1 服务状态监控5.2 哨兵选主规则5.3 哨兵模式下,Redi…...
v1.30.1)
二进制安装Kubernetes(k8s)v1.30.1
二进制安装Kubernetes(k8s)v1.30.1 https://github.com/cby-chen/Kubernetes 开源不易,帮忙点个star,谢谢了 介绍 kubernetes(k8s)二进制高可用安装部署,支持IPv4IPv6双栈。 我使用IPV6的目的是…...
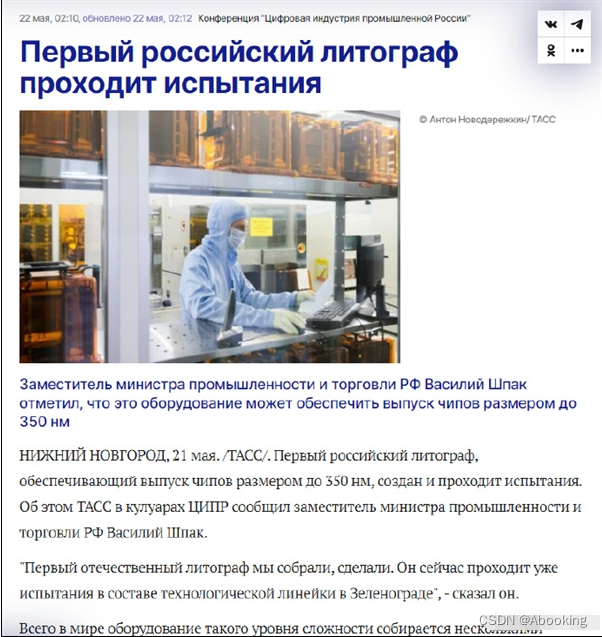
俄罗斯半导体领域迈出坚实步伐:首台光刻机诞生,目标直指7纳米工艺
近日,国外媒体纷纷报道,俄罗斯在半导体技术领域取得了重要突破,首台光刻机已经制造完成并正在进行严格的测试阶段。这一里程碑式的事件标志着俄罗斯在自主发展半导体技术的道路上迈出了坚实的一步。 据俄罗斯联邦工业和贸易部副部长瓦西里-什…...

什么是容器:从基础到进阶的全面介绍
✨✨ 欢迎大家来访Srlua的博文(づ ̄3 ̄)づ╭❤~✨✨ 🌟🌟 欢迎各位亲爱的读者,感谢你们抽出宝贵的时间来阅读我的文章。 我是Srlua小谢,在这里我会分享我的知识和经验。&am…...
力扣 第 399 场周赛 解题报告 | 珂学家 | 调和级数 + 分块DP
前言 T1. 优质数对的总数 I 题型: 签到 class Solution:def numberOfPairs(self, nums1: List[int], nums2: List[int], k: int) -> int:res 0for v1 in nums1:for v2 in nums2:if v1 % (v2 * k) 0:res 1return resT2. 压缩字符串 III 思路: 模拟 感觉引入一个栈&…...
Redis的下载、安装、启动和初尝试【超级简单】
redis最好是在Linux系统中使用,这是最接近生产实际的环境。 不过,我们初学者,目的是学习Redis的使用、原理,如果在Linux下直接学习Redis,很可能会因为命令不熟悉而劝退,这是不好的。 因此,我主张…...
v-cloak 用于在 Vue 实例渲染完成之前隐藏绑定的元素
如果你是后端开发者(php),在接触一些vue2开发的后台时,会发现有这段代码: # CDN <script src"https://cdn.jsdelivr.net/npm/vue2/dist/vue.js"></script> # 或 <script src"https://cd…...

港股:并不意外的获利了结
中金公司表示,风险偏好驱动的反弹已经较为充分,分歧和获利了结也不意外。接下来或在当前水平震荡盘整,等待更多催化剂。 在持续一个月的大涨后,港股市场上周出现明显回调。此前我们多次提示,市场已经超买,情…...
)
Python项目开发实战:工厂库存管理系统(案例教程)
一、项目背景与意义 随着制造业的快速发展,工厂库存管理成为了企业运营中不可或缺的一部分。一个高效的库存管理系统能够确保物料供应的及时性、降低库存成本、提高生产效率。因此,我们决定使用Python开发一个工厂库存管理系统,以满足工厂日常库存管理的需求。 二、系统需求…...

VS2022 嘿嘿
还是大二的时候就开始用这个,但居然是为了用PB,-_-|| 用了段时间换成了C#,依稀还记得大佬们纠正我的读法,别读C井,应该读C夏普。。。 安装过程其实也没啥,就是关键Key得花时间找,我好不容易搞…...

Flutter 中的 PhysicalShape 小部件:全面指南
Flutter 中的 PhysicalShape 小部件:全面指南 在Flutter中,PhysicalShape小部件是一个能够为子组件添加物理效果的边框和阴影的装饰性小部件。它能够模拟真实世界中物体的立体感,通过在子组件的周围创建一个可自定义的形状,并添加…...

CAD二次开发(6)-用户交互之选择集
1. 简单测试 测试让选中的图形描红 [CommandMethod("SeleDemo")]public void SeleDemo(){Database db HostApplicationServices.WorkingDatabase;Editor ed Application.DocumentManager.MdiActiveDocument.Editor;PromptSelectionResult psr ed.GetSelection();…...

零基础玩转AI斗地主:DouZero_For_HappyDouDiZhu快速上手实战指南
零基础玩转AI斗地主:DouZero_For_HappyDouDiZhu快速上手实战指南 【免费下载链接】DouZero_For_HappyDouDiZhu 基于DouZero定制AI实战欢乐斗地主 项目地址: https://gitcode.com/gh_mirrors/do/DouZero_For_HappyDouDiZhu 想要在欢乐斗地主中体验AI智能辅助的…...

深入解析中兴光猫工厂模式:解锁隐藏网络管理权限的技术探索
深入解析中兴光猫工厂模式:解锁隐藏网络管理权限的技术探索 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 在当今的网络设备管理中,中兴光猫作为广泛部署的终端…...

实战指南:ComfyUI-Impact-Pack图像智能修复与细节增强解决方案
实战指南:ComfyUI-Impact-Pack图像智能修复与细节增强解决方案 【免费下载链接】ComfyUI-Impact-Pack Custom nodes pack for ComfyUI This custom node helps to conveniently enhance images through Detector, Detailer, Upscaler, Pipe, and more. 项目地址: …...

OpenWebUI 到底解决了什么,没解决什么?
先说结论OpenWebUI 把多模型切换、对话管理、参数调整从命令行搬到了浏览器,交互体验接近 ChatGPT,但部署本身有硬性前提。免费内网穿透方案有 24 小时域名更换限制,固定域名需付费,远程访问稳定性取决于网络环境。对于只跑单个模…...
应用不能边试边搭?)
AI-7D-SATS 平台的施工蓝图:为什么企业级 Agent(智能任务角色)应用不能边试边搭?
企业级 Agent(智能任务角色)应用不是把模型接进系统就结束。它更像一项工程建设:先画清蓝图,再决定哪里用智能,哪里靠流程,哪里必须留给人确认。一、为什么企业级 Agent 不能边试边搭 很多团队第一次做 Age…...
,准确率暴跌的3个致命盲区!)
ChatGPT翻译质量真相:20年本地化专家实测12类文本(技术文档/法律合同/文学隐喻),准确率暴跌的3个致命盲区!
更多请点击: https://intelliparadigm.com 第一章:ChatGPT翻译质量怎么样 ChatGPT 在多语种翻译任务中展现出较强的上下文理解与语义连贯能力,尤其在非技术类通用文本(如日常对话、新闻摘要、文学性段落)上࿰…...

2026年10款论文降AIGC软件实测:从90%降至10%的宝藏之选
现在学校对 AIGC 的检测越来越严格,降低 AI 率成了毕业季最让人抓狂的问题。我当初写论文的时候也踩了大坑,AI 率直接飙到 80% 多,改得我头发都快掉没了。熬夜一遍遍地调整语句,结果 AI 率没降下来,查重率反而越改越高…...

NVIDIA显卡终极色彩校准指南:novideo_srgb让广色域显示器回归真实色彩
NVIDIA显卡终极色彩校准指南:novideo_srgb让广色域显示器回归真实色彩 【免费下载链接】novideo_srgb Calibrate monitors to sRGB or other color spaces on NVIDIA GPUs, based on EDID data or ICC profiles 项目地址: https://gitcode.com/gh_mirrors/no/novi…...

终极指南:如何使用d2dx开源工具让经典《暗黑破坏神2》在现代PC上完美运行
终极指南:如何使用d2dx开源工具让经典《暗黑破坏神2》在现代PC上完美运行 【免费下载链接】d2dx D2DX is a complete solution to make Diablo II run well on modern PCs, with high fps and better resolutions. 项目地址: https://gitcode.com/gh_mirrors/d2/d…...

3分钟免费激活Windows和Office:开源KMS激活脚本终极指南
3分钟免费激活Windows和Office:开源KMS激活脚本终极指南 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 你是否正在为电脑屏幕上那个"Windows未激活"的水印而烦恼…...