STM32定时器四大功能之定时器编码接口
1什么是编码器接口?
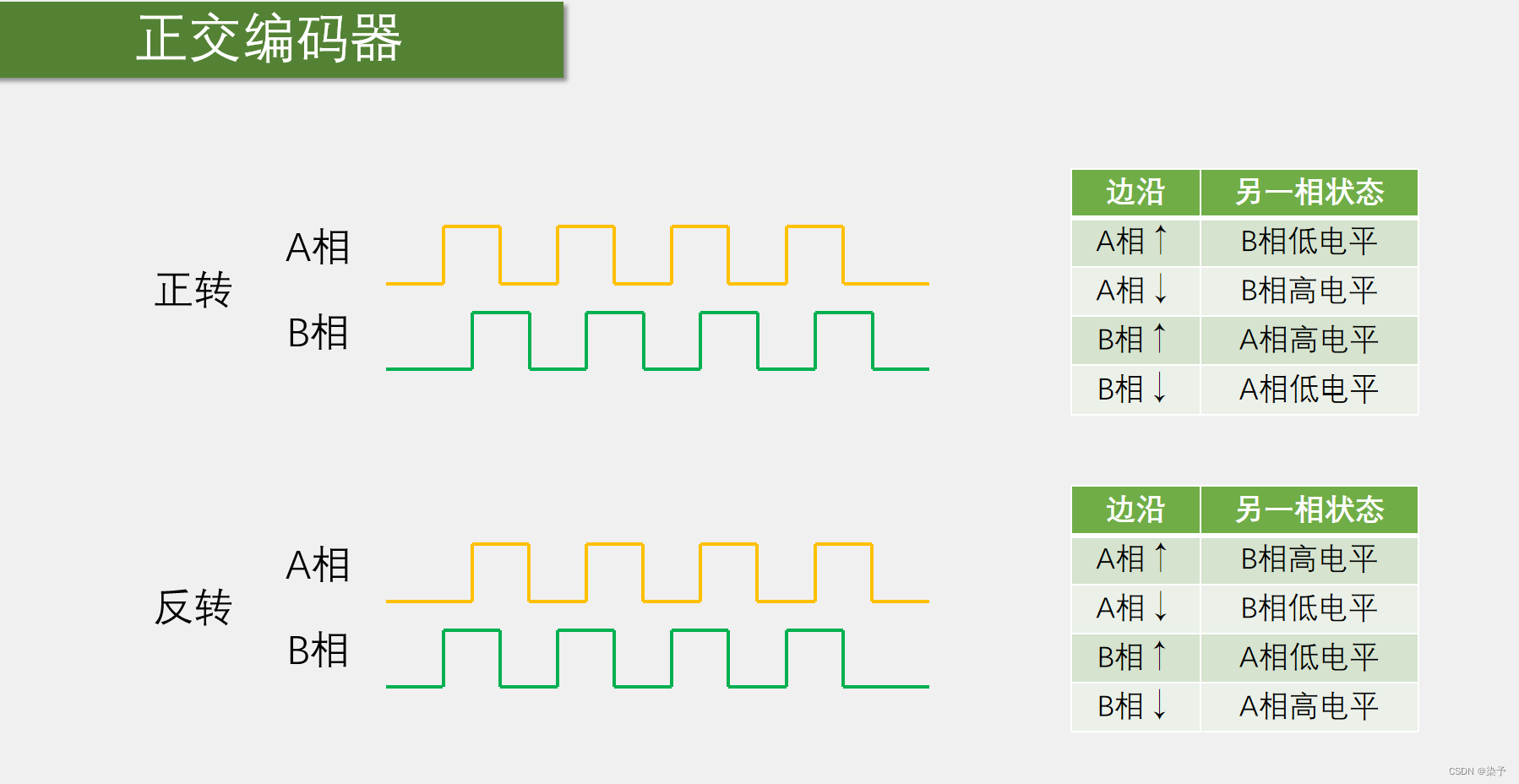
编码器接口接受编码器的正交信号,根据编码器产生的正交信号脉冲控制CNT的自增和自减,从而指示编码器的旋转方向和旋转速度。
每个高级定时器和通用定时器都有一个编码器接口,同时正交编码器产生的正交信号分为正转和反转,通过两个GPIO口产生的正交信号来决定是正转还是反转。
2.编码器接口基本结构
CNT的自增还是自减受编码器控制,输入捕获的前两个通道通过GPIO口连接编码器的A相和B相,再通过滤波器和边沿极性选择,产生TI1FP1和TI2FP2信号通向编码器接口,同时编码器接口根据编码器的旋转方向控制CNT的计数方向,编码器正转,CNT自增,编码器翻转,CNT自减。编码器接口相当于使用了一个带有方向选择的外部时钟。

3.通用定时器基本框图
如下图所示,我们可以看到TIMx_CH1和TIMx_CH2输入捕获的前两个通道,产生TI1FP1和TI2FP2信号通向编码器接口。

4.编码器模块Encoder代码编写
(1).开启RCC时钟,包括GPIO和定时器3的时钟。
//1.开启时钟TIM3的时钟线是APB1RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//2.开启GPIOA时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);(2).配置GPIO,把PA6和PA7引脚配置成输入模式(PA6为TIM3_CH1通道,PA7为TIM3_CH2通道)
GPIO_InitTypeDef GPIO_Inistructure;GPIO_Inistructure.GPIO_Mode= GPIO_Mode_IPU;//PWM输入设置为上拉输入GPIO_Inistructure.GPIO_Pin= GPIO_Pin_6 | GPIO_Pin_7;GPIO_Inistructure.GPIO_Speed= GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_Inistructure);//读取结构体的参数(3).时基单元初始化。配置预分频器,预分频器选择不分频,ARR自动重装值给最大,只配置CNT即可。
//3.时基单元初始化TIM_TimeBaseInitTypeDef TIM_timBaseInitStructure;TIM_timBaseInitStructure.TIM_ClockDivision= TIM_CKD_DIV1;//一分频TIM_timBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;//向上计数TIM_timBaseInitStructure.TIM_Period=65536-1;//ARRTIM_timBaseInitStructure.TIM_Prescaler=1-1;//PSC 选择不分频TIM_timBaseInitStructure.TIM_RepetitionCounter=0;//重复计数器是高级定时器才有的TIM_TimeBaseInit(TIM3,&TIM_timBaseInitStructure);(4).配置输入捕获单元(包含滤波器和边沿极性选择)
//4.配置输入捕获单元通道一和通道2TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICStructInit(&TIM_ICInitStructure);//结构体初始化TIM_ICInitStructure.TIM_Channel=TIM_Channel_1;//定时器3的通道1TIM_ICInitStructure.TIM_ICFilter=0xF;//滤波器TIM_ICInitStructure.TIM_ICPolarity= TIM_ICPolarity_Rising;//边沿检测极性选择上升沿触发,代表输入波形极性不翻转TIM_ICInit(TIM3,&TIM_ICInitStructure);TIM_ICStructInit(&TIM_ICInitStructure);//结构体初始化TIM_ICInitStructure.TIM_Channel=TIM_Channel_2;//定时器3的通道2TIM_ICInitStructure.TIM_ICFilter=0xF;//滤波器TIM_ICInitStructure.TIM_ICPolarity= TIM_ICPolarity_Rising;//边沿检测极性选择上升沿触发,代表输入波形极性不翻转TIM_ICInit(TIM3,&TIM_ICInitStructure);5.配置编码器接口,A/B相均计数,A/B波形输入选择Rising,极性不反转
//5配置编码器接口,A/B相均计数,A/B波形输入选择Rising,极性不反转TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);6. 启动定时器
//6.启动定时器TIM_Cmd(TIM3,ENABLE);
7.得到CNT的值
//得到CNT的值
int16_t Encoder_Get(void)
{int16_t temp;temp=TIM_GetCounter(TIM3);//得到CNT的值TIM_SetCounter(TIM3,0);//将CNT清0return temp;
}5.用TIM2中断函数计数
目的:调用TIM2中断函数,每产生一个更新事件,记一次数,即测速。在TIM2产生的中断函数中,实现对TIM3编码器产生的正交信号进行计数。
在main.c函数中实现TIM2中断函数的调用,在中断函数中实现计数的功能
注:中断函数的更新事件的标志位,在程序进行完之后要对中断标志位进行清除。
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
#include "Encoder.h"int16_t Speed; //定义速度变量int main(void)
{OLED_Init(); Timer_Init(); //定时器2初始化Encoder_Init(); //编码器初始化/*显示静态字符串*/OLED_ShowString(1, 1, "Speed:"); while (1){OLED_ShowSignedNum(1, 7, Speed, 5); //不断刷新显示编码器测得的最新速度}
}// 函 数:TIM2中断函数
void TIM2_IRQHandler(void)
{if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) //判断是否是TIM2的更新事件触发的中断{Speed = Encoder_Get(); //每隔固定时间段读取一次编码器计数增量值,即为速度值TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除TIM2更新事件的中断标志位//中断标志位必须清除//否则中断将连续不断地触发,导致主程序卡死}
}
相关文章:
STM32定时器四大功能之定时器编码接口
1什么是编码器接口? 编码器接口接受编码器的正交信号,根据编码器产生的正交信号脉冲控制CNT的自增和自减,从而指示编码器的旋转方向和旋转速度。 每个高级定时器和通用定时器都有一个编码器接口,同时正交编码器产生的正交信号分…...
全国各城市间驾车耗时和距离矩阵数据集(更新至2022年)
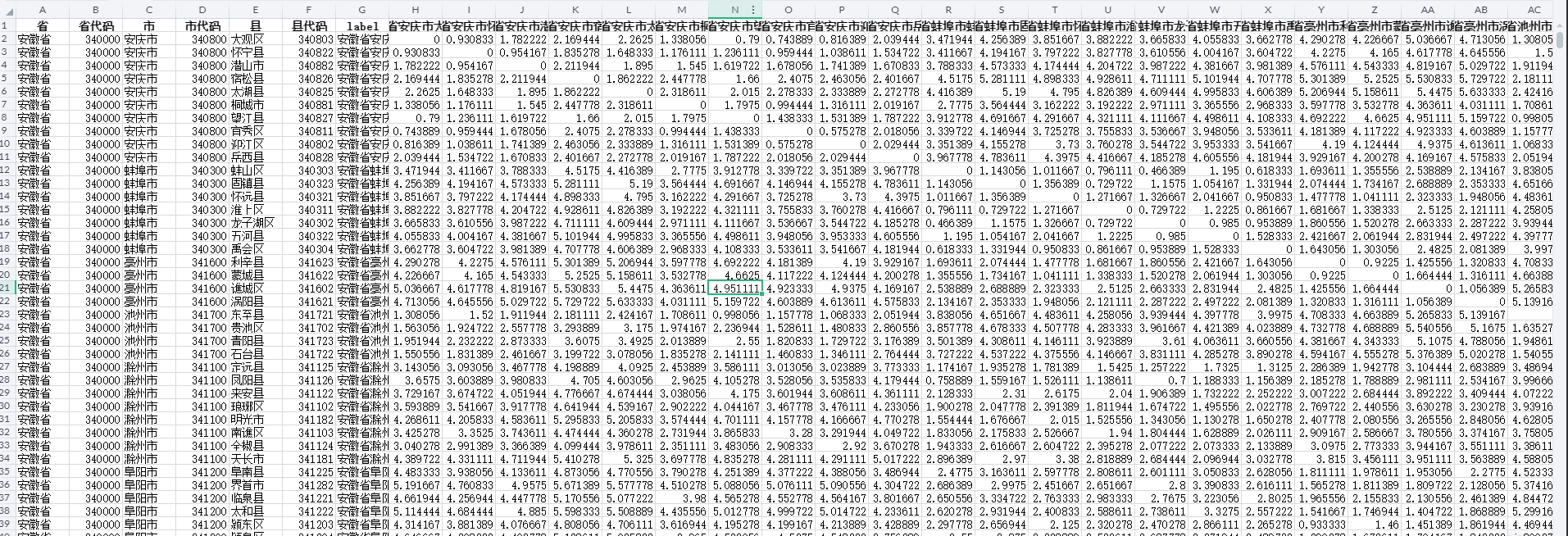
数据简介:城市之间距离越远,耗时越长。经济发达地区的交通状况较好。各城市之间的驾车耗时和距离存在差异。有些城市之间的交通非常便捷,而有些城市之间的交通则较为不便。这表明中国的交通网络发展尚不平衡,需进一步优化。特别是…...
推荐二轮电动车仪表盘蓝牙主芯片方案-HS6621CGC
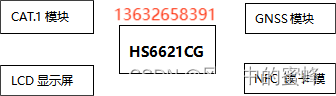
随着国内二轮电动车的火热开启,电动车的智能化程度越来越高;电动车的智能操控需求也越来越高,现在介绍蓝牙控制面板的一些功能;例如:定位(GNSS),设防,实时上报数据&#…...

『香橙派』基于Orange Pi AIpro打造高效个人云存储解决方案
读完这篇文章里你能收获到 了解Orange Pi AIpro硬件优势,为构建高效云存储基础设施的理想平台。学会使用Orange Pi AIpro硬件平台,搭载Ubuntu Server系统,打造云存储环境。掌握利用Kodbox软件,享受文件管理、多格式预览及编辑的全…...
)
Sylvester矩阵、子结式、辗转相除法的三者关系(第二部分)
【三者的关系】 首先,辗转相除法可以通过Sylvester矩阵进行,过程如下(以 m 8 、 l 7 m 8、l 7 m8、l7为例子)。 首先调整矩阵中 a a a系数到最后面几行,如下所示: S ( a 8 a 7 a 6 a 5 a 4 a 3 a 2 …...
PyTorch的数据处理
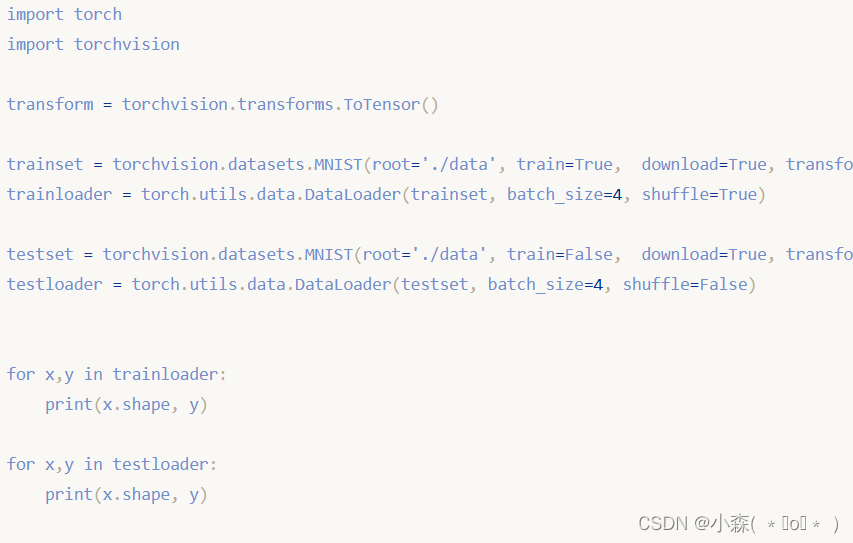
💥今天看一下 PyTorch数据通常的处理方法~ 一般我们会将dataset用来封装自己的数据集,dataloader用于读取数据 Dataset格式说明 💬dataset定义了这个数据集的总长度,以及会返回哪些参数,模板: from tor…...
第14章-蓝牙遥控小车 手把手做蓝牙APP遥控小车 蓝牙串口通讯讲解
本文讲解手机蓝牙如何遥控小车,如何编写串口通信指令 第14章-手机遥控功能 我们要实现蓝牙遥控功能,蓝牙遥控功能要使用:1.单片机的串口、2.蓝牙通信模块 所以我们先调试好:单片机的串口->蓝牙模块->接到一起联调 14.1-电脑控制小车 完成功能…...

【补充1】字节对齐
文章目录 1.字节对齐的基本概念2.字节对齐规则3.实践出真知(加大难度)4 位域 1.字节对齐的基本概念 (1)现代计算机中内存空间都是按照byte划分的, 从理论上讲似乎对任何类型的变量的访问可以从任何地址开始࿰…...
)
Java数据库连接(JDBC)
一、引言 在Java应用程序中,经常需要与数据库进行交互以存储、检索和处理数据。Java数据库连接(JDBC)是Java平台中用于执行这一任务的标准API。JDBC允许Java程序连接到关系数据库,并使用SQL语句来执行查询和更新操作。本教程将详…...

记录一次cas单点登录的集成
主要思路:浏览器访问CAS服务器登录,拿到凭证给后端,后端用此凭证到CAS服务器验证登录并拿到用户信息,之后基于该凭证维持用户的登录状态。 主要流程: 1.浏览器访问后端需认证登录地址(不带ticket…...
【吊打面试官系列】Java高并发篇 - 什么是乐观锁和悲观锁?
大家好,我是锋哥。今天分享关于 【什么是乐观锁和悲观锁?】面试题,希望对大家有帮助; 什么是乐观锁和悲观锁? 1、乐观锁: 就像它的名字一样,对于并发间操作产生的线程安全问题持乐观状态, 乐观锁认为竞争…...
机器学习之词袋模型
目录 1 词袋模型基本概念 2 词袋模型的表示方法 2.1 三大方法 1 独热表示法(One-Hot) 2 词频表示法(Term Frequency, TF) 3 词频-逆文档频率表示法(TF-IDF) 2.2 例子 1 词袋模型基本概念 词袋模型&a…...
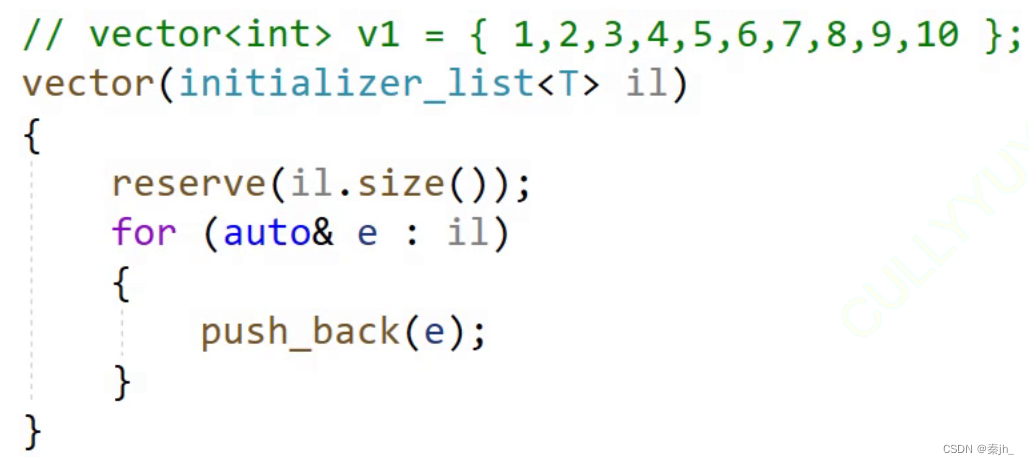
【C++/STL】vector(常见接口、模拟实现、迭代器失效)
🌈个人主页:秦jh_-CSDN博客🔥 系列专栏: https://blog.csdn.net/qinjh_/category_12575764.html?spm1001.2014.3001.5482 目录 简单使用 常见接口 find insert vector模板 模拟实现 尾插 构造 迭代器失效 使用memcpy拷贝问…...

Spring Boot Web 开发:MyBatis、数据库连接池、环境配置与 Lombok 全面解析
推荐一个AI网站,免费使用豆包AI模型,快去白嫖👉海鲸AI 1.0 MyBatis 概述 MyBatis 是一个优秀的持久层框架,它支持自定义 SQL、存储过程以及高级映射。MyBatis 可以帮助我们将数据库操作抽象出来,使得我们的代码更加简洁…...
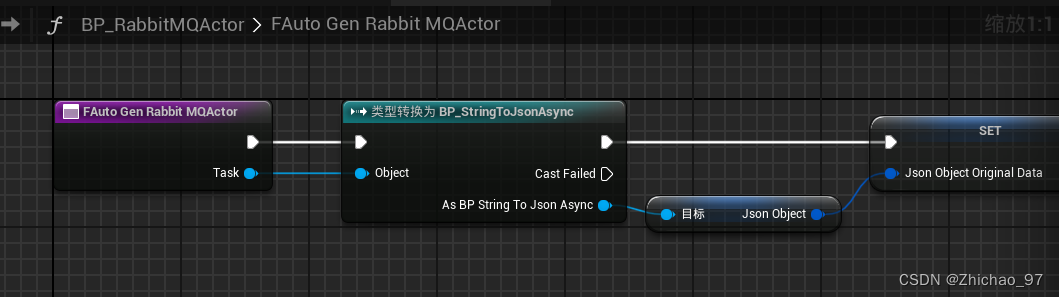
【UE5.1 多线程 异步】“Async Blueprints Extension”插件使用记录
目录 一、异步生成Actor示例 二、异步计算示例 参考视频 首先需要在商城中下载“Async Blueprints Extension”插件 一、异步生成Actor示例 2. 创建一个线程类,这里要指定父类为“LongAsyncTask”、“InfiniteAsyncTask”、“ShortAsyncTask”中的一个 在线程类…...

【已解决】在jupyter里运行torch.cuda.is_available(),显示True,在pycharm中运行却显示false。
文章目录 问题概述1、在Jupyter中GPU运行true2、在pycharm中GPU运行false3、个人解决方案仅供参考 问题概述 在jupyter里运行torch.cuda.is_available(),显示True,在pycharm中运行却显示false。原因在于jupyter 运行环境和pycharm 运行环境不同…...

Flutter 中的 Scrollbar 小部件:全面指南
Flutter 中的 Scrollbar 小部件:全面指南 在Flutter中,滚动条(Scrollbar)是一种常见的UI组件,用于提供对滚动内容的快速访问和控制。Scrollbar 小部件可以附加到任何可滚动的widget上,如ListView、GridVie…...
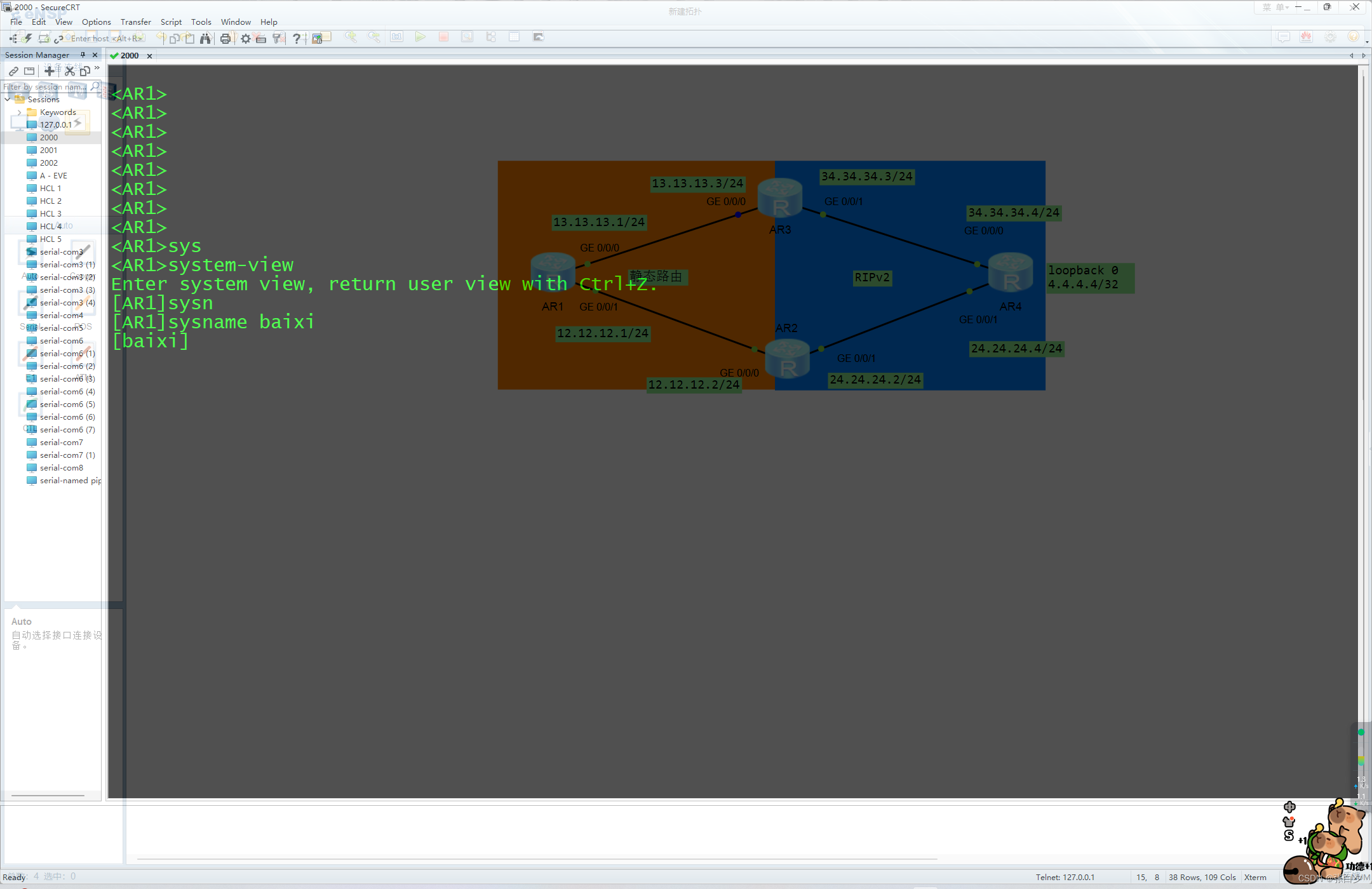
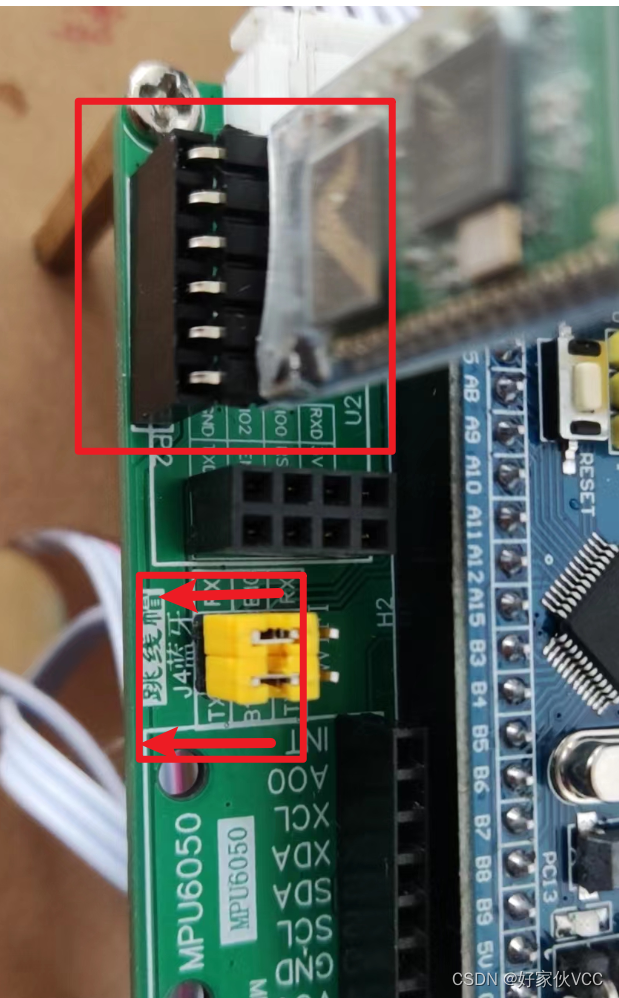
【华为】将eNSP导入CRT,并解决不能敲Tab问题
华为】将eNSP导入CRT,并解决不能敲Tab问题 eNSP导入CRT打开eNSP,新建一个拓扑右键启动查看串口号关联CRT成功界面 SecureCRT连接华为模拟器ensp,Tab键不能补全问题选择Options(选项)-- Global Options (全局选项&#…...

实验二 电子传输系统安全-进展2
上周任务完成情况(代码链接,所写文档等) 重新调通电子公文传输系统部署gmssl学习生成SM2证书学习gmssl中的CTLS实现将数据库从SqlServer迁移到Mysql调试Mysql驱动学习Bouncy Castle 代码链接 Mysql表设计 /* Navicat MySQL Data Transfer…...

JavaScript 获取 HTML 中特定父元素下的子元素
JavaScript 获取 HTML 中特定父元素下的子元素 <!DOCTYPE html> <html lang"en"> <head> <meta charset"UTF-8"> <title>查找子元素示例</title> </head> <body><div id"parent"><p&…...

基于RLHF的论据语言改写:用强化学习优化文本得体性
1. 项目概述与核心价值在互联网的公共讨论空间里,论据的质量直接决定了对话的深度与有效性。我们常常会遇到一些观点本身有价值,但表达方式充满攻击性、偏见或粗俗语言的文本。直接删除这些内容可能损害言论自由,但放任不管又会污染讨论环境&…...

Unity Android读取SD卡图片的5种实战方案与选型指南
1. 为什么在 Unity Android 上“读取 sdcard 图片”会让人反复踩坑? “Unity Android 读取 sdcard 路径下指定文件夹的所有图片”——这句话看似平平无奇,但凡是真正在项目里做过相册预览、本地图库导入、离线资源加载、用户截图归档这类功能的开发者&am…...

G-Helper终极指南:华硕笔记本性能控制革命,轻量化设计的智慧选择
G-Helper终极指南:华硕笔记本性能控制革命,轻量化设计的智慧选择 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, …...

C#实现ASCII和字符串相互转换的代码示例
知识点 string 1 Stirng.Empty 表示空字符串。 此字段为只读。此字段的值为零长度字符串“”。string为引用数据类型。会在内存的栈和堆上分配存储空间。因此string.Empty与“”都会在栈上保存一个地址,这个地址占4字节,指向内存堆中的某个长度为0的空间…...

ML/MM混合方法在药物结合自由能计算中的基准评估与实战指南
1. 项目概述与核心挑战在计算机辅助药物设计的核心战场上,预测一个候选药物分子(配体)与靶点蛋白结合的紧密程度——即结合自由能,是决定项目成败的关键。这个数值直接关联到药物的效力和选择性,传统上需要通过耗时耗力…...

量子机器学习数据集构建:从核心要素到工程实践
1. 量子机器学习数据集构建:从分类到实践的核心思路量子机器学习(QML)这个领域,现在就像十年前的深度学习,概念很热,但真正能上手、能复现、能出成果的“基础设施”还非常稀缺。我接触过不少从经典机器学习…...
)
告别虚拟机!手把手教你用U盘给新电脑装Win11+UOS 1060双系统(保姆级分区教程)
告别虚拟机!手把手教你用U盘给新电脑装Win11UOS 1060双系统(保姆级分区教程)刚拿到新电脑的开发者常面临一个两难选择:既需要Windows环境运行专业软件,又得适配国产操作系统完成兼容性测试。虚拟机虽然方便,…...
)
【2026年阿里巴巴集团暑期实习- 5月23日-算法岗-第二题- 多约束条件下的元素匹配统计】(题目+思路+JavaC++Python解析+在线测试)
题目内容 给定三个长度为 nnn 的数组 { a1,a2,…,an}\{a_1, a_2, \dots, a_n\}{ a...

Evident方法论:用观察、假设、测试构建可复现的数据科学工作流
1. 项目概述:为什么我们需要一种新的数据科学方法论?干了十多年数据科学和机器学习项目,从初创公司到大型企业都待过,我越来越觉得,我们这行当的“工作方式”有点不对劲。项目周期总是难以预估,代码和数据像…...

RFECV特征选择在勒索软件分类中的实战:API与网络流量特征对比
1. 项目概述:当勒索软件分类遇上RFECV特征选择在网络安全攻防的战场上,勒索软件无疑是最具破坏性和经济威胁的对手之一。它不再仅仅是技术宅的恶作剧,而是演变成了组织化、产业化的犯罪工具,其变种迭代速度之快,让传统…...