有限元法之有限元空间的构造
目录
一、区域Ω的剖分
二、三角形一次元
三、一次元的基函数与面积坐标
四、三角形二次元及其基函数
前两节我们介绍了有限元基本概念和变分理论的推导,本节我们继续探讨有限元空间的构造。
一、区域Ω的剖分
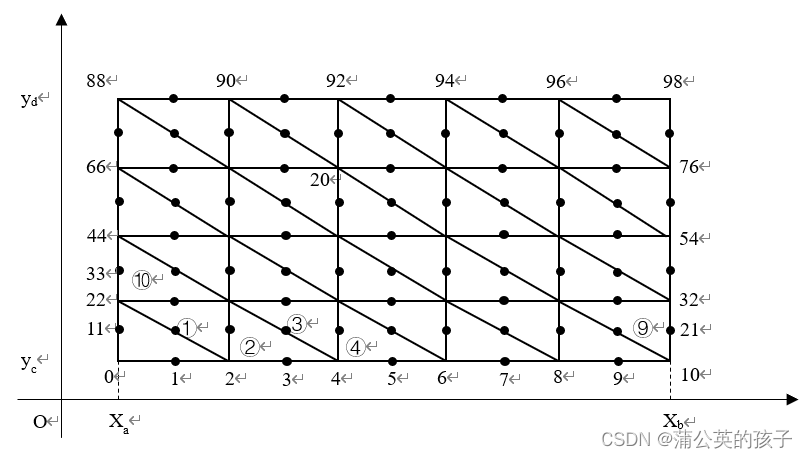
对矩形区域进行三角剖分,其中x方向剖分m份,y方向剖分n份,共得到
个节点及
个三角形单元。图1是
的剖分情况,节点编号用数字表示,单元用带圈的数字表示。为了实现后面的程序编写,必须明确单元上的局部编号与整体编号,如图2所示。通过设置剖分数,可以建立单元上整体编号与局部编号之间的关系,可设置二维数组
,第一个参数为单元编号,第二个参数为局部节点编号,如
等,表示第3个单元第0号局部节点的整体节点编号为8,而
则表示第2个单元第1号局部节点的整体节点编号为2。可以通过循环设置所有的节点。


二、三角形一次元
前面两节提到,可以选取为分片连续的一次多项式函数空间,也就是在每个单元e上,
中的函数都是一次多项式,且要保证整体连续。因此对于相邻的两个三角形单元,它们有一条公共边,只要保证分片一次多项式在这条公共边的两个端点(也是剖分节点)处函数值相同即可保证函数整体连续。这样,分片一次多项式在每个单元上的表达式就可以由它在3个顶点处的值唯一确定。下面,在节点
(对应整体编号为i,j,k)的单元e上考虑数值解
的表达式,尝试用基函数来表示
,其中
为待定基函数,满足以下性质:
且它们都是一次函数。这样,数值解在单元e上的表达式完全由它在3个顶点处
处的值
决定,
可以看作精确解u在整体编号i,j,k的节点处的近似。一旦把所有
求出来(边界点除外,因为
从而边界节点处
的值为零),则数值解
的表达式也就确定了。所以现在的基本问题是对离散问题式
求,使得
建立的关系式。
三、一次元的基函数与面积坐标
由于基函数在单元e上是一次多项式,尝试设,其中a,b,c为待定系数,且单元e上s号节点
的坐标为
,则由条件公式(1)可知:
从而解出
代入可得
可以证明以(逆时针排列)为顶点的三角形单元e的面积
。
于是,若内有一点P的坐标为
,如图3所示,则
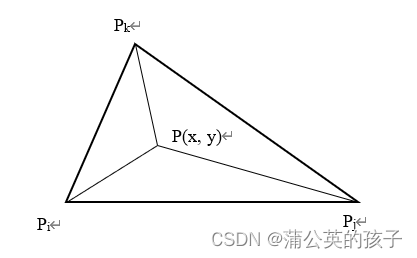
同理,
注意到,显然有
也就是说不是相互独立的。换言之,
内任一点
,必然可以唯一对应一组坐标
,基函数
被称为重心坐标。由于它们又都是三角形的面积比,所以它们也称为面积坐标。面积坐标在有限元分析中非常重要,它是从一般单元变化到标准单元的工具,也是进行Sobolev空间范数估计的有效手段。事实上,公式(4)、(5)可以反解出直角坐标
与重心坐标之间的对应关系式:
从而可以实现将一般的三角形单元变换成标准单元
,如图4所示。

四、三角形二次元及其基函数
我们除了可以选取为分片连续的一次多项式函数空间外,也可以选取
为分片连续的二次多项式函数空间,也就是在每个单元e上,
中的函数都是二次多项式,且要保证整体连续。因此在每个单元e上,
中的分片二次多项式函数
就形如
,其中
均为待定常数,从而需要有6个条件来唯一确定这个表达式。与一次元相似,要确定这6个常数,我们可以取三角形单元e的3个顶点及3条边的中点值作为条件(这些条件称为自由度),即分片二次多项式在每个单元上的表达式就可以由它在这个单元3个顶点和3条边的中点处的值唯一确定,这样也可以保证函数的整体连续性。事实上,在相邻的两个三角形单元上的公共边上,位置变量x和y有一个直线方程的线性约束,从而
在这条边上成为一个只关于自变量x的二次函数,这个函数在3个不同的点(两个顶点和一个中点)上取值相同,说明
在公共边上的表达式所示唯一确定的,也就是说,这个分片二次多项式在相邻两个单元上虽然整体表达式不相同,但在其公共边上表达式相同,这就保证了函数在
上整体连续,从而实现
。
对于以上的三角形二次元,由于涉及到三角形单元的中点,所以尽管三角形剖分情况不变,即共有2mn个三角形单元,但整体节点数变为个,且节点的编号将随之发生改变。例如,图1将变为图5。
接下来,在单元e上考虑数值解的表达式,其中e的3个顶点为
(对应整体编号为i,j,k),3条边的中点为
(对应整体编号为
),如图6。
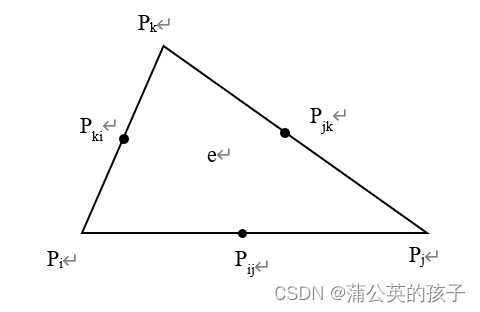
在单元e上的表达式尝试用基函数表示为
其中为待定基函数,满足以下性质:
利用重心坐标,很容易将上述基函数表示出来,即有分别对应于三角形单元3个顶点的基函数:
及对应于三角形3条边中点的 基函数:
至此,数值解 在单元e上的表达式就确定为:
综上,有限元空间由一个三元组
确定。具体的,设
是区域Ω的一个剖分,e是剖分
中的单元,参数h定义为所有单元的最大直径,即
,
是选定的分片多项式函数空间,
是每个e上用于唯一确定
内的多项式函数所需要的条件。
相关文章:
有限元法之有限元空间的构造
目录 一、区域Ω的剖分 二、三角形一次元 三、一次元的基函数与面积坐标 四、三角形二次元及其基函数 前两节我们介绍了有限元基本概念和变分理论的推导,本节我们继续探讨有限元空间的构造。 一、区域Ω的剖分 对矩形区域进行三角剖分,其中x方向剖…...

高通车规芯片分析
高通三款芯片 SA8155P 7nm SA8295P 5nm SA8255P 5nm 分析AECQ等级 AECQ100里面定义了5个工作环境温度等级:Grade0:-40-150 Grade1:-40-125 Grade2:-40-105 Grade3:-40-85 Grade4:0-70AEC-Q100整体认证测试…...

Flutter 中的 TextButton 小部件:全面指南
Flutter 中的 TextButton 小部件:全面指南 在Flutter的世界里,TextButton是一个基础的小部件,用于创建只包含文本的按钮。它通常用于对话框、表单以及需要强调主要操作的界面。本文将为您提供一个全面的指南,帮助您了解如何使用T…...

通过键值对访问字典
自学python如何成为大佬(目录):https://blog.csdn.net/weixin_67859959/article/details/139049996?spm1001.2014.3001.5501 在Python中,如果想将字典的内容输出也比较简单,可以直接使用print()函数。例如,要想打印dictionary字典ÿ…...

海外仓扫码管理系统怎么选?精准,高效管理需求才是核心需求
海外仓对那些想拓展国际市场的商家来说还是非常重要的,大部分的货物都需要先运到海外仓,才能继续进行下一步的物流快递发货。 那对于海外仓本身来说,当面临大量订单的时候,怎么快速的管理订单,拣选货物就变得十分重要…...

基于51单片机的智能灯光控制系统
一.硬件方案 智能灯光控制系统由单片机最小系统、人体感应模块、关照强度模块、灯光控制模块、电源模块和灯泡组成。本文以STC89C52单片机为核心,通过利用光照度和红外人体感应相结合主动与被动的探测方法,现了室内无人或者关照充足时灯光自动光灯&…...

测试开发面试题
简述自动化测试的三大等待 强制等待。直接使用time.sleep()方法让程序暂停指定的时间。优点是实现简单,缺点是不够灵活,可能会导致不必要的等待时间浪费。隐式等待。设置一个固定的等待时间,在这个时间内不断尝试去查找元素,如果…...
多线程JUC 第2季 BlockingQueue 阻塞队列
一 阻塞队列 1.1 阻塞队列介绍 阻塞队列(BlockingQueue)是一个在队列基础上又支持了两个附加操作的队列: put方法:当队列装满时,添加的线程则被阻塞,直到队列不满,则可用。 take方法&#x…...
-带查询扩展的全文搜索)
【MySQL精通之路】全文搜索(3)-带查询扩展的全文搜索
博主PS:你可以把他理解为,查询猜测,膨胀查询,查询的第六感。 全文搜索支持查询扩展(尤其是其变体“盲查询扩展”)。 当搜索短语太短时,这通常很有用,这通常意味着用户依赖于全文搜索…...
【面试必看】Java并发
并发 1. 线程 1. 线程vs进程 进程是程序的一次执行过程,是系统运行程序的基本单位,因此进程是动态的。 系统运行一个程序即是一个进程从创建,运行到消亡的过程。在 Java 中,当我们启动 main 函数时其实就是启动了一个 JVM 的进…...

C++的第一道门坎:类与对象(一)
1.面向过程与面向对象 1.1面向过程 我们之前学习的C语言就是一种面向过程的语言,面向过程的语言强调的是具体实现的过程,一般用函数来具体实现。我们用面向过程的思想,就可以把炒菜分为以下几个步骤: 1.2面向对象 而对于面向对象的语言而言…...

经典面试题:MySQL如何调优?
目录 前言1. SQL查询优化2. 索引优化3. 表结构设计4. 硬件与配置优化5. 日常维护6. 性能测试与基准测试 前言 MySQL如何进行调优?这是面试中容易被问到的高频问题。 1. SQL查询优化 避免使用select* :只选取需要的列,减少数据传输量。使用…...

【程序员如何送外卖】
嘿,咱程序员要在美团送外卖,那还真有一番说道呢。 先说说优势哈,咱程序员那逻辑思维可不是盖的,规划送餐路线什么的,简直小菜一碟。就像敲代码找最优解一样,能迅速算出怎么送最省时间最有效率。而且咱平时…...

【git pull 和 push详解】
git pull 和 push详解 1.背景2.命令和解释2.1 git pull简介详情 2.2 git push简介Git Push 参数及详细解释 1.背景 在分布式开发环境中,git pull和git push的使用确保了团队成员之间的代码一致性,减少了不同步导致的问题。它们简化了版本管理,…...

数据挖掘导致直接路径读(direct path read)耗尽了IO
一大早就有喊业务卡的,检查等待事件源头,均为oracle写等待 查看IO负载持续维持在100%繁忙 后台有两个并行rman备份在,停止备份io繁忙没有好转,检查最近ash报告,发现DDTEK ODBC Oracle程序模块占用最高 检查该模块&…...
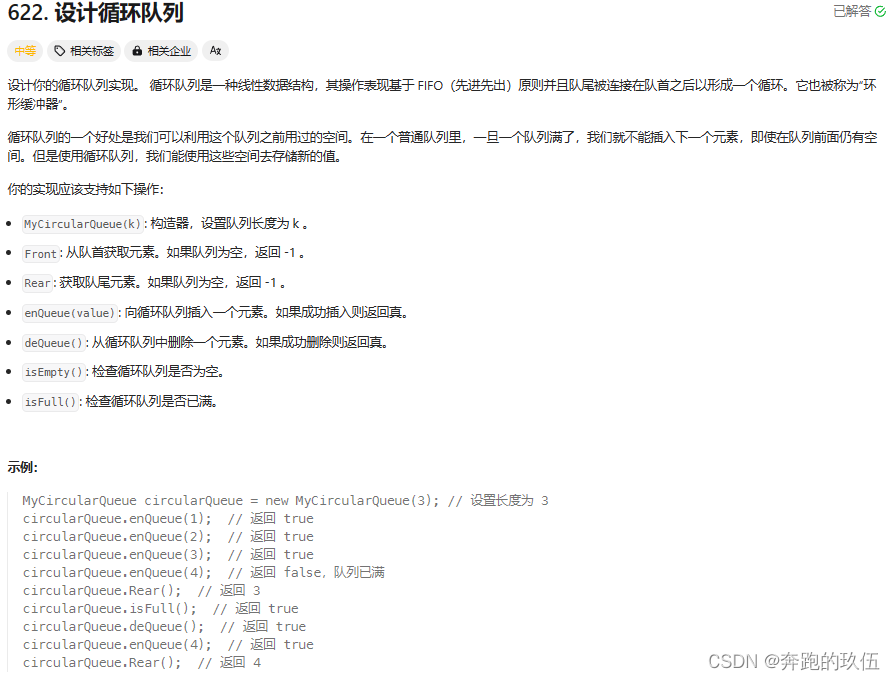
用队列实现栈 用栈实现队列 设计循环队列
用队列实现栈 思路 栈的特点:后进先出 队列的特点:先进先出 使用两个队列实现栈: 我们可以使用两个队列,一个队列为:空队列,一个队列为:非空队列 当我们要出队列时: 将 size - …...

BFS解决最短路问题(详解)
目录 BFS简介 && 框架: 一.二叉树的最小深度 二:迷宫中里入口最近的出口: 三.最小基因变化: 四:单词接龙: 五:为高尔夫比赛砍树: BFS简介 && 框架: 说到BFS…...

按尺寸筛选轮廓图中的轮廓
1.按短边筛选 原始轮廓图: import cv2 import numpy as np# 读取轮廓图 contour_image cv2.imread(..\\IMGS\\pp_edge.png, cv2.IMREAD_GRAYSCALE)# 使用cv2.findContours()函数获取所有轮廓 contours, _ cv2.findContours(contour_image, cv2.RETR_EXTERNAL, cv2…...

VBA高级应用30例:实现在列表框内及列表框间实现数据拖动
《VBA高级应用30例》(版权10178985),是我推出的第十套教程,教程是专门针对高级学员在学习VBA过程中提高路途上的案例展开,这套教程案例与理论结合,紧贴“实战”,并做“战术总结”,以…...

「AIGC算法」R-tree算法
R-tree算法是一种非常实用的空间数据索引技术,它可以帮助我们在复杂的空间数据中快速找到我们想要的信息。下面我将用一些生活中的例子来帮助大家更好地理解R-tree算法。 1. 定义与原理 想象一下,你有一个巨大的图书馆,里面有成千上万本书,每本书都有它在书架上的特定位置…...

Poppler Windows版:PDF处理的终极简单方案
Poppler Windows版:PDF处理的终极简单方案 【免费下载链接】poppler-windows Download Poppler binaries packaged for Windows with dependencies 项目地址: https://gitcode.com/gh_mirrors/po/poppler-windows 还在为Windows上的PDF处理工具而烦恼吗&…...

React上下文菜单常见问题解答:解决10个典型使用难题
React上下文菜单常见问题解答:解决10个典型使用难题 【免费下载链接】react-contextmenu Project is no longer maintained 项目地址: https://gitcode.com/gh_mirrors/re/react-contextmenu React-contextmenu 是一个强大的 React 上下文菜单组件库…...

TaskbarX完整指南:Windows任务栏图标居中与动画特效实战教程
TaskbarX完整指南:Windows任务栏图标居中与动画特效实战教程 【免费下载链接】TaskbarX Center Windows taskbar icons with a variety of animations and options. 项目地址: https://gitcode.com/gh_mirrors/ta/TaskbarX TaskbarX是一款专为Windows 10/11设…...

Office RibbonX Editor:零编程定制Office界面的终极免费开源工具
Office RibbonX Editor:零编程定制Office界面的终极免费开源工具 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribb…...

Mythos能力路由引擎:大模型时代的动态门控推理架构
1. 项目概述:一次被刻意“锁住”的能力跃迁如果你最近关注大模型前沿动态,大概率在技术社区、AI从业者群聊或邮件列表里见过“TAI #200”这个编号——它不是某篇论文的DOI,也不是某个开源项目的Release Tag,而是The AI Index Repo…...

昇腾CANN opbase与算子生态协作:从单一算子到完整计算图
前言 单个算子的性能再高,如果无法和其他算子高效协作,最终端到端的模型推理或训练性能也不会好。一个典型的深度学习模型包含几十到几百个算子,它们之间的数据流、内存分配、执行顺序都需要精心编排。opbase作为所有算子仓库的公共基础&…...

nodejs后端服务如何接入taotoken实现异步调用多模型对话能力
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Node.js 后端服务如何接入 Taotoken 实现异步调用多模型对话能力 1. 准备工作:获取 API Key 与模型 ID 在开始编写代码…...

AI-native开发:从工具使用者到智能体编排工程师的范式跃迁
1. 这不是“学AI工具”,而是重构整个开发认知体系“AI-native软件开发者”这个说法最近在技术社区刷屏,但很多人一上来就去狂刷Copilot快捷键、背Prompt模板、堆砌LLM API调用——这就像当年刚有IDE时,有人花三个月专门练CtrlShiftF的肌肉记忆…...

论软件系统建模方法及其应用——以飞秒激光加工控制系统为例
摘要 2024年1月,我参与了某精密制造企业“高精度飞秒激光加工控制系统”项目的研发,担任系统架构设计师,主要负责系统建模、核心模块设计与集成测试。该项目旨在开发一套用于航空叶片微孔加工的数控系统,要求实现1μm的定位精度、实时补偿与工艺自适应调整。系统具有强实时…...

90%的小程序死于“搜不到”:微信搜索排名优化全拆解
在微信生态里,小程序早已不是“有没有”的问题,而是“能不能被找到”的问题。用户搜索关键词时,你的小程序排在第几位,直接决定了流量的天花板。很多人以为排名靠运气,其实背后有一套可复制的优化逻辑。一、名称是最大…...