ROS 工作空间
ROS 工作空间
工作空间概念
ROS 的工作空间
在 ROS 中,工作空间(通常称为 Catkin 工作空间)是一个文件夹(目录)结构,它用于组织、构建和管理 ROS 项目中的软件包。主要特点包括:
1. 目录结构
- src(Source):存放 ROS 软件包的源代码。每个包是一个独立的单位,包含节点、消息定义、服务定义等。
- build:包含构建过程中生成的中间文件。这是由构建系统(如 Catkin)生成的。
- devel:包含构建后的可执行文件和库,以及设置环境变量所需的脚本,如
setup.bash。
2. 功能
- 包管理:工作空间用于管理不同的 ROS 包,包括编译、链接库等。
- 构建系统:使用 Catkin(ROS 的标准构建系统)编译和构建包。
3. 用途
- 为 ROS 项目提供了一个标准化的开发环境。
- 使得包的编译和依赖管理更加容易。
集成开发环境的工作空间
在 IDE(如 Eclipse、Visual Studio Code 或 IntelliJ IDEA)中,工作空间是一个更广义的概念,指的是整个开发环境的配置和项目集合。主要特点包括:
1. 项目组织
- 包含多个项目(Project),每个项目可能包含代码、文档、资源文件等。
- 项目可以独立,也可以彼此相关。
2. 配置和设置
- 工作空间存储 IDE 的配置设置,如代码风格、编译器选项、插件设置等。
- 可以为不同的工作空间定义不同的配置。
3. 用途
- 提供一个包含所有必要工具和资源的综合开发环境。
- 使得在不同项目或不同配置环境之间切换变得容易。
总结
- ROS 工作空间是特定于 ROS 的,主要用于管理 ROS 软件包,包括源代码、构建和开发环境设置。
- IDE 工作空间是一个更广泛的概念,涉及到项目管理、开发环境的配置和用户设置,不限于特定的编程框架或系统。
这两个概念虽然共享“工作空间”这个名称,但它们服务于不同的目的,反映了不同类型的软件开发需求和环境。
ROS的工作空间目录结构
在 Robot Operating System (ROS) 中,工作空间(workspace)是开发和组织 ROS 项目的主要环境。一个典型的 ROS 工作空间目录结构主要包括以下几个关键部分:
1. 工作空间目录(Workspace Directory)
- 通常命名为
catkin_ws,这是一个顶级目录,用于存储整个 ROS 工作空间的相关文件和文件夹。
2. 源代码目录(src)
src目录包含工作空间的源代码。这里通常放置 ROS 包(packages)的源代码。- 每个 ROS 包都是一个包含节点、消息定义、服务定义等的目录。
3. 构建目录(build)
- 当运行
catkin_make或类似的构建命令时,build目录会被创建。 - 它包含编译过程中生成的中间文件,例如 CMake 文件和其他构建脚本。
4. 开发目录(devel)
devel目录包含编译后的二进制文件和库,以及其他为运行 ROS 程序所需的文件。- 它还包含一些重要的环境设置文件,例如
setup.bash,用于配置 ROS 环境。
5. 安装目录(install,可选)
- 如果使用
catkin_make install或类似命令,install目录将包含最终安装的文件。 - 这个目录结构类似于
devel,但用于持久化安装。
工作空间的典型使用流程
- 创建工作空间:创建
catkin_ws目录,并在其中创建一个src目录。 - 创建或克隆包:在
src目录中创建新的包或克隆现有的包。 - 构建工作空间:在
catkin_ws目录中运行catkin_make,构建所有包并生成build和devel目录。 - 源环境文件:运行
source devel/setup.bash来设置 ROS 环境变量。
注意事项
- 版本控制:通常只有
src目录下的文件被纳入版本控制系统(如 Git),而build和devel目录应该被忽略(例如,在.gitignore文件中列出)。 - 清理工作空间:如果需要清理工作空间,可以删除
build和devel目录,然后重新运行catkin_make。 - 环境设置:每次打开新的终端并想要使用该工作空间时,都需要源
devel/setup.bash文件。
ROS 工作空间的这种结构设计旨在提供清晰、逻辑性强的方式来组织和构建 ROS 项目,同时方便用户进行开发和测试。
创建ROS工作空间
在 ROS(Robot Operating System)中创建工作空间是一个基础且关键的步骤,用于组织和管理你的 ROS 项目。以下是创建一个标准的 ROS 工作空间的详细步骤:
1. 打开终端
首先,打开一个新的终端窗口。
2. 创建工作空间目录
你将需要创建一个新的目录来作为你的工作空间。这个目录通常被命名为 catkin_ws(catkin 是 ROS 的一个构建系统)。
mkdir -p ~/catkin_ws/src
这里的 mkdir -p 命令创建了 catkin_ws 和它的子目录 src。src 目录是用来存放你的 ROS 包的地方。
3. 初始化工作空间
接下来,你需要初始化工作空间。这个步骤将创建一个基本的 CMakeLists.txt 文件,它是 catkin 构建系统的配置文件。
cd ~/catkin_ws/src
catkin_init_workspace
4. 构建工作空间
返回到 catkin_ws 目录并运行 catkin_make 命令。这个命令会构建工作空间,生成 devel 和 build 目录。
cd ~/catkin_ws
catkin_make
devel目录包含了所有必要的设置脚本以及构建的可执行文件。build目录包含了构建过程中生成的各种文件。
5. 设置环境变量
每次打开一个新的终端并希望在这个工作空间中工作时,你需要源工作空间的设置文件。可以将这个命令添加到你的 .bashrc 文件中,以自动设置每个新终端的环境。
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
6. 开始使用工作空间
现在,你的 ROS 工作空间已经准备好了。你可以开始创建新的 ROS 包或克隆现有的包到 src 目录中。
注意事项
- 选择 ROS 版本:确保你已经安装了 ROS,并且知道你正在使用的 ROS 版本(例如 ROS Noetic)。
- 依赖关系:在创建特定的 ROS 包时,可能需要安装额外的依赖项。
- ROS 环境:确保你的 ROS 环境已经正确设置(通常是在
.bashrc文件中源 ROS 的setup.bash文件)。 - 定期更新:定期运行
catkin_make并源setup.bash以确保环境和构建是最新的。
遵循这些步骤,你可以创建一个标准的 ROS 工作空间,这是开发和运行 ROS 包的基础环境。
Scripts文件夹
在 ROS(Robot Operating System)软件包中,scripts 文件夹扮演着特定的角色。这个文件夹通常用于存放可执行脚本,主要是那些不需要编译的脚本语言编写的程序,如 Python。以下是关于 scripts 文件夹的详细解释:
用途
- 存放脚本:
scripts文件夹主要用于存放可直接运行的脚本文件,这些文件通常是用 Python 或其他解释型语言(如 shell 脚本)编写的。 - 节点脚本:在 ROS 中,脚本通常是节点(nodes),执行特定的功能,如发布或订阅话题、提供服务等。
特点
- 无需编译:与 C++ 程序不同,存放在
scripts目录中的 Python 脚本不需要编译。它们是直接解释执行的,这意味着你可以修改脚本并直接运行,无需再次编译整个项目。 - 执行权限:为了让脚本可执行,通常需要给这些脚本文件设置执行权限。这可以通过在终端运行
chmod +x script_name.py命令来实现。 - 便于快速开发:使用 Python 或其他脚本语言进行节点开发可以加快开发过程,因为它们通常更易于编写和调试。
使用场景
- 快速原型设计:当需要快速开发和测试新的想法或算法时,脚本语言通常是一个好的选择。
- 小型、简单的任务:对于一些简单的功能,如简单的数据处理、调用服务或作为中间件,使用脚本语言通常更加高效。
- 教育和学习:对于刚开始学习 ROS 的人来说,Python 脚本提供了一个相对简单的起点。
结构和组织
- 脚本应该清晰地命名,反映其功能。
- 对于复杂的程序,考虑将功能拆分到不同的脚本或模块中,以保持代码的可读性和可维护性。
示例
假设你有一个名为 talker.py 的 Python 脚本,它是一个发布 ROS 话题的节点。这个文件应该放在 scripts 文件夹中,并且应该具有执行权限。
注意事项
- 依赖管理:确保所有脚本所需的依赖都已安装。
- 环境兼容性:考虑到不同的 ROS 版本可能支持不同版本的 Python,确保你的脚本与你的 ROS 版本兼容。
总之,scripts 文件夹是 ROS 软件包中用于存放可执行脚本的地方,这些脚本通常用于执行不需要编译的任务,如用 Python 编写的 ROS 节点。
相关文章:

ROS 工作空间
ROS 工作空间 工作空间概念 ROS 的工作空间 在 ROS 中,工作空间(通常称为 Catkin 工作空间)是一个文件夹(目录)结构,它用于组织、构建和管理 ROS 项目中的软件包。主要特点包括: 1. 目录结构…...

【科普】ChatGPT-4o 是什么?和之前的ChatGPT4.0有什么区别,各有什么优劣势
文章目录 前言一、ChatGPT-4o 是什么?**主要特点和改进**: 二、ChatGPT-4o 和之前的ChatGPT4.0有什么区别,各有什么优劣势区别优势和劣势ChatGPT-4.0ChatGPT-4o 前言 5月13日,ChatGPT-4o发布,是人工智能的进一步发展&…...

django-celery-beat自动调度异步任务
Celery是一个简单、灵活且可靠的分布式系统,专门用于处理大量消息的实时任务调度。它支持使用任务队列的方式在分布的机器、进程、线程上执行任务调度。Celery不仅支持异步任务(如发送邮件、文件上传、图像处理等耗时操作),还支持…...
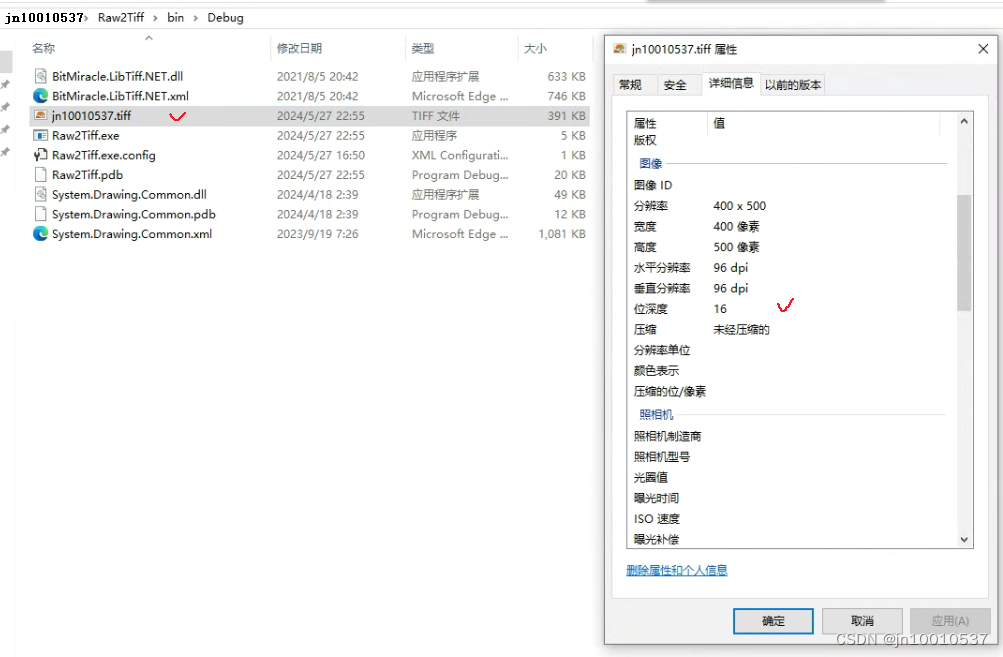
【CSharp】将ushort数组保存为1通道位深16bit的Tiff图片
【CSharp】将ushort数组保存为1通道位深16bit的Tiff图片 1.背景2.接口 1.背景 System.Drawing.Common 是一个用于图像处理和图形操作的库,它是 System.Drawing 命名空间的一部分。由于 .NET Core 和 .NET 5 的跨平台特性,许多以前内置于 .NET Framework…...
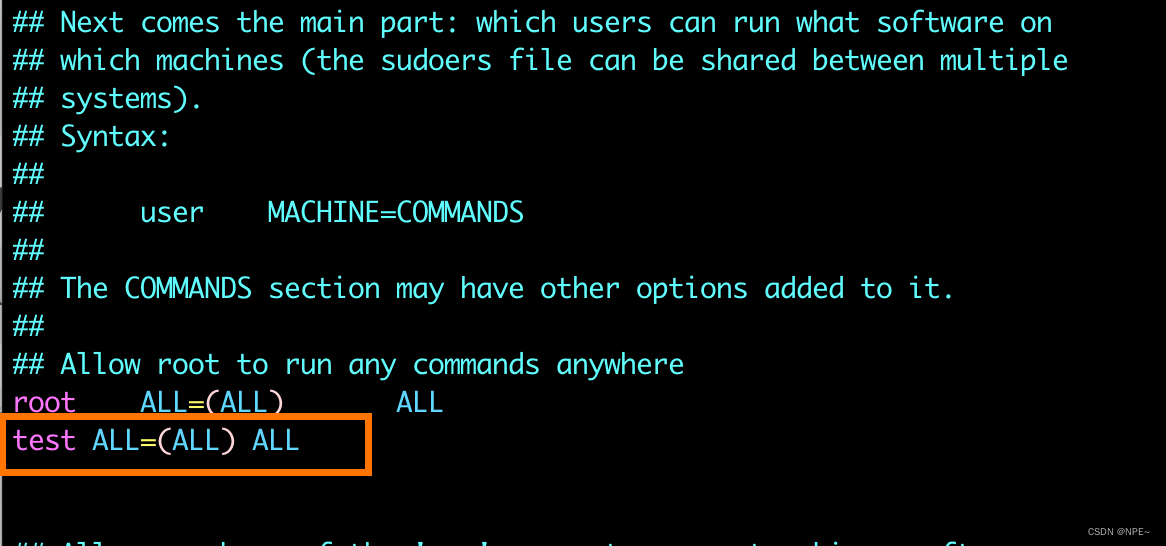
Bug:Linux用户拥有r权限但无法打开文件【Linux权限体系】
Bug:Linux用户拥有r权限但无法打开文件【Linux权限体系】 0 问题描述&解决 问题描述: 通过go编写了一个程序,产生的/var/log/xx日志文件发现普通用户无权限打开 - 查看文件权限发现该文件所有者、所有者组、其他用户均有r权限 - 查看该日…...
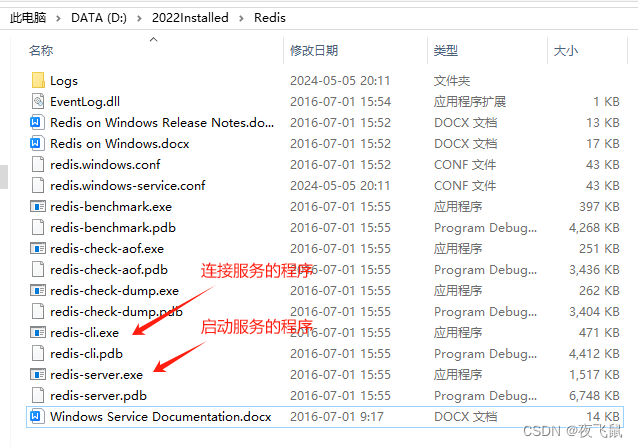
【Redis】Widows 和 Linux 下使用 Redis
Redis 简述 1.缓存 缓存就是将数据存放在距离计算最近的位置以加快处理速度。缓存是改善软件性能的第一手段,现代 CPU 越来越快的一个重要因素就是使用了更多的缓存,在复杂的软件设计中,缓存几乎无处不在。大型网站架构设计在很多方面都使用了缓存设计。 2.Redis Redis …...

统计计算四|蒙特卡罗方法(Monte Carlo Method)
系列文章目录 统计计算一|非线性方程的求解 统计计算二|EM算法(Expectation-Maximization Algorithm,期望最大化算法) 统计计算三|Cases for EM 文章目录 系列文章目录一、基本概念(一)估算 π \pi π(二&…...
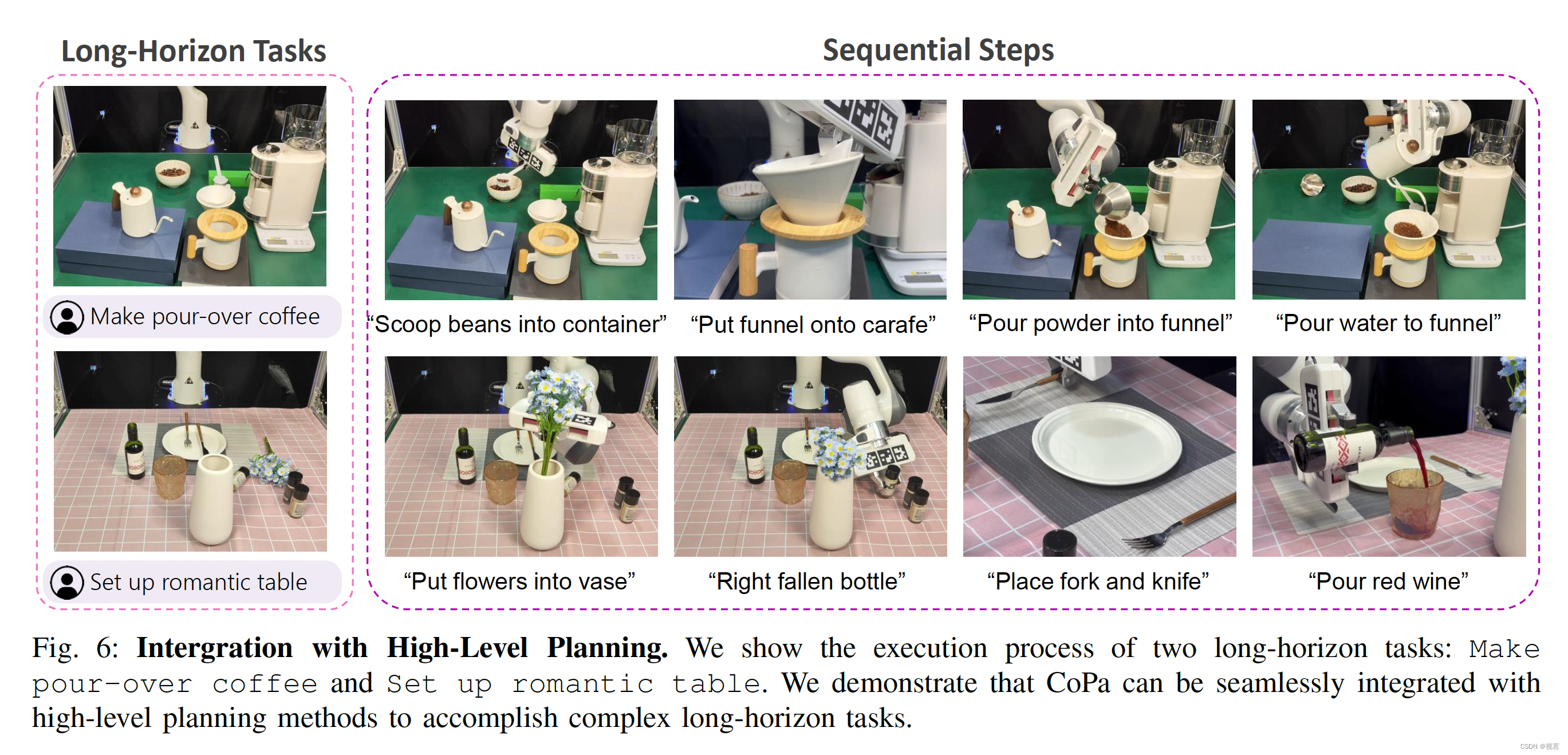
大模型时代的具身智能系列专题(三)
清华高阳团队 高阳为清华叉院助理教授,本科毕业于清华大学计算机系,博士毕业于UC Berkeley。博士导师是Vision领域的大牛Trevor Darrell,读博期间和Sergey Levine合作开始强化学习方面的探索,博后跟随Pieter Abbeel做强化学习&am…...
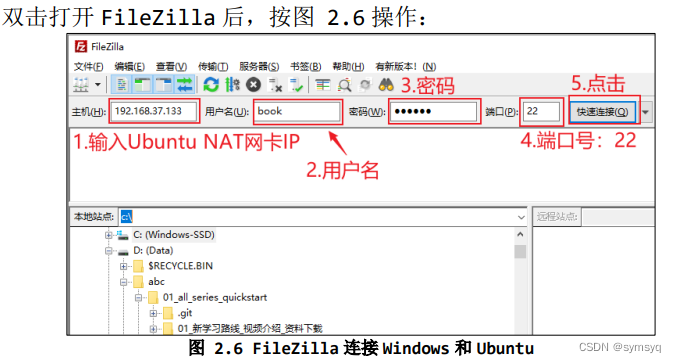
使用 FileZilla 在 Windows 和 Ubuntu 之间传文件
网线一端插在板子的WAN口上,另一段插在电脑上,然后要配一下板子的IP。 板侧: 使用串口链接板子与PC端; 输入指令 ifconfig eth0(具体看wan口对应哪一个) 192.168.1.99 PC端配置: 打开网络设…...

【C++初阶】—— 类和对象 (上)
📝个人主页🌹:EterNity_TiMe_ ⏩收录专栏⏪:C “ 登神长阶 ” 🌹🌹期待您的关注 🌹🌹 类和对象 1. 初步认识C2. 类的引入3. 类的定义声明和定义全部放在类体中声明和定义分开存放 4.…...
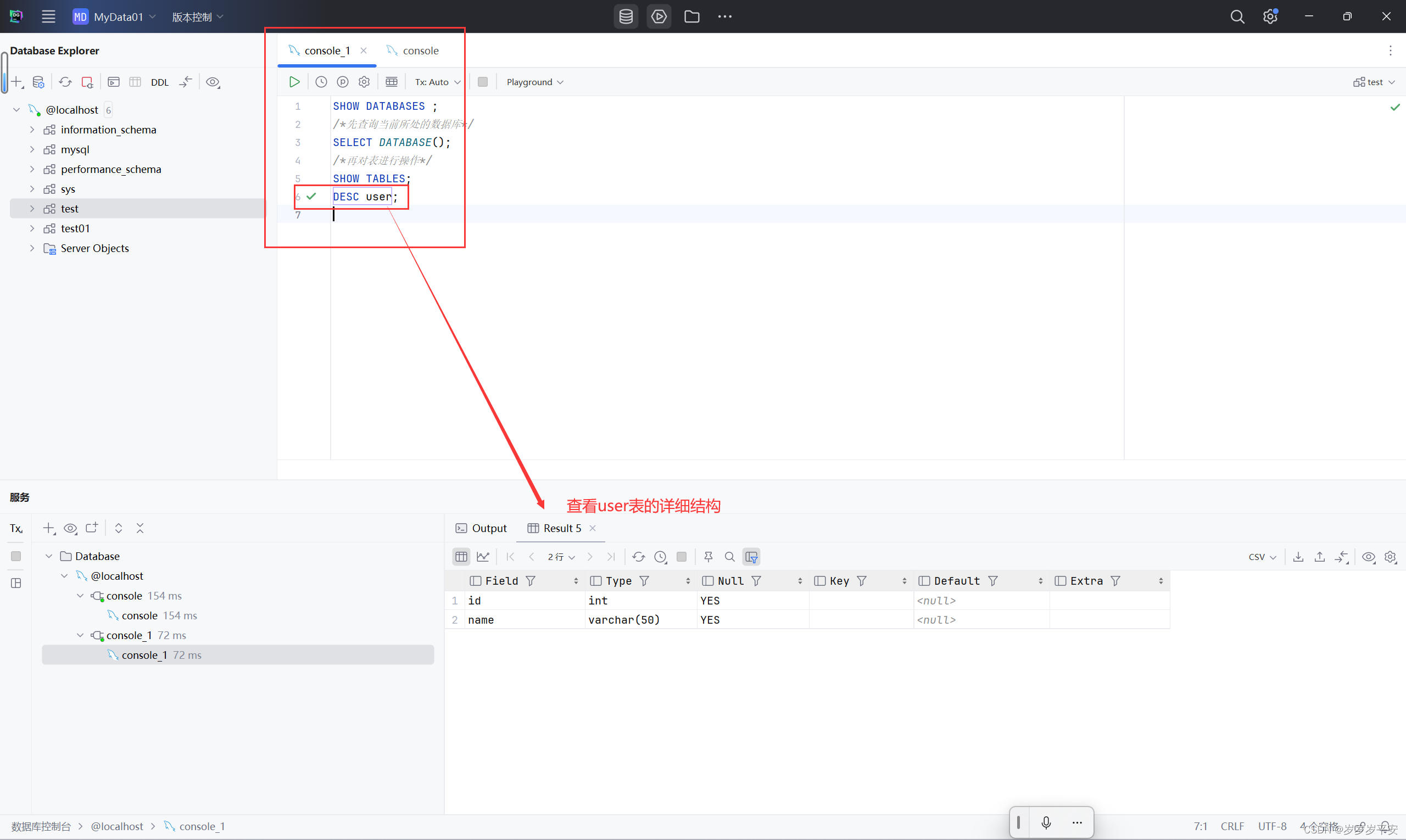
基础—SQL—图形化界面工具的DataGrip使用(2)
一、回顾与引言 (1) 上次内容,博客讲到了DDL语句的数据库操作、表操作、表字段的操作的相关语法,然而之前都是在MySQL的命令行当中去操作演示的。这种方式可以用,但是使用的话,第一,在我们日常…...

4-主窗口
4-主窗口 1、简介2 菜单栏、工具栏、状态栏2.1 菜单栏2.2 QAction2.3 工具栏2.4 状态栏 3 混合方式UI设计 1、简介 QMainWindow是一个为用户提供主窗口程序的类,包含一个菜单栏、多个工具栏、多个停靠控件、一个状态栏以及一个中心控件,是许多应用程序&…...

四川景源畅信:抖音小店新手如何做?
随着短视频平台的兴起,抖音小店成为了许多创业者的新选择。但是,对于新手来说,如何在抖音上开设并经营好自己的小店呢?本文将围绕这一问题展开讨论。 一、明确目标和定位作为抖音小店的新手,首先要明确自己的经营目标和定位。是想…...

EventSource
什么是EventSource EventSource 是一个用于服务器推送事件(Server-Sent Events, SSE)的接口,它允许服务器推送实时更新到浏览器。与 WebSocket 不同,SSE 是单向的(服务器到客户端),适用于更新频…...

Vue2 Element-UI 分页组件el-pagination 修改 自带的total、跳转等默认文字
场景需求: Vue2 Element-UI 分页组件el-pagination 修改 自带的total、跳转等默认文字。如下图:默认提示字变成了英文,如何将其 变成 汉字提示呢? 解决方案: 1.方案1:修改DOM内容 不提倡此方案…...

【简单介绍下线性回归模型】
🌈个人主页: 程序员不想敲代码啊 🏆CSDN优质创作者,CSDN实力新星,CSDN博客专家 👍点赞⭐评论⭐收藏 🤝希望本文对您有所裨益,如有不足之处,欢迎在评论区提出指正,让我们共…...
有限元法之有限元空间的构造
目录 一、区域Ω的剖分 二、三角形一次元 三、一次元的基函数与面积坐标 四、三角形二次元及其基函数 前两节我们介绍了有限元基本概念和变分理论的推导,本节我们继续探讨有限元空间的构造。 一、区域Ω的剖分 对矩形区域进行三角剖分,其中x方向剖…...

高通车规芯片分析
高通三款芯片 SA8155P 7nm SA8295P 5nm SA8255P 5nm 分析AECQ等级 AECQ100里面定义了5个工作环境温度等级:Grade0:-40-150 Grade1:-40-125 Grade2:-40-105 Grade3:-40-85 Grade4:0-70AEC-Q100整体认证测试…...

Flutter 中的 TextButton 小部件:全面指南
Flutter 中的 TextButton 小部件:全面指南 在Flutter的世界里,TextButton是一个基础的小部件,用于创建只包含文本的按钮。它通常用于对话框、表单以及需要强调主要操作的界面。本文将为您提供一个全面的指南,帮助您了解如何使用T…...

通过键值对访问字典
自学python如何成为大佬(目录):https://blog.csdn.net/weixin_67859959/article/details/139049996?spm1001.2014.3001.5501 在Python中,如果想将字典的内容输出也比较简单,可以直接使用print()函数。例如,要想打印dictionary字典ÿ…...
2026最新官方正版免费下载 一键转存 永久更新 (看到速转存 资源随时走丢))
冬日狂想曲(赠去马赛克补丁)2026最新官方正版免费下载 一键转存 永久更新 (看到速转存 资源随时走丢)
下载链接 独立像素游戏的设计范式:以《冬日狂想曲》为例的机制与架构分析 在当代独立游戏开发领域,微型箱庭(Miniature Sandbox)与时间管理机制的结合,正逐渐成为中小型社团实现“低成本、高粘度”叙事的重要手段。作…...

如何快速掌握高效屏幕标注:终极免费工具完全指南
如何快速掌握高效屏幕标注:终极免费工具完全指南 【免费下载链接】ppInk Fork from Gink 项目地址: https://gitcode.com/gh_mirrors/pp/ppInk 你是否曾在在线会议中手忙脚乱地试图解释屏幕上的内容?或者作为教师,想要在虚拟课堂上生动…...

树莓派4B部署YOLOv8保姆级避坑指南:从PyTorch版本选择到模型推理全流程
树莓派4B部署YOLOv8实战手册:从版本适配到高效推理的深度解析 引言 在嵌入式设备上部署现代计算机视觉模型,就像给一辆微型赛车装上F1引擎——潜力巨大但挑战重重。最近帮朋友在树莓派4B上部署YOLOv8时,我们花了三天时间才走出"依赖地狱…...

【AI时代】一句指令复刻所有网页 WEB原型不用愁
【AI时代】一句指令复刻所有网页 WEB原型不用愁“连接 CDP,参考 baidu.com,开发功能原型,1:1 复刻现有页面。”就这么一句话,AI 帮你把原型做出来了。📸 效果对比 原始参考页面生成效果💡 这是 原型开发方式…...

PEMS交通数据分析实战:如何用Python从海量5分钟速度数据中挖掘拥堵规律?
PEMS交通数据分析实战:如何用Python从海量5分钟速度数据中挖掘拥堵规律? 在智能交通系统快速发展的今天,PEMS(Performance Measurement System)提供的5分钟级交通流数据已成为城市拥堵分析和路网优化的黄金标准。这些看…...

SpringBoot+Vue毕业生追踪系统源码+论文
代码可以查看文章末尾⬇️联系方式获取,记得注明来意哦~🌹 分享万套开题报告任务书答辩PPT模板 作者完整代码目录供你选择: 《SpringBoot网站项目》1800套 《SSM网站项目》1500套 《小程序项目》1600套 《APP项目》1500套 《Python网站项目》…...

别再为Tesseract中文识别报错发愁了!手把手教你搞定chi_sim语言包和环境变量配置
Tesseract中文识别实战:从报错排查到精准配置的全流程指南 当你在终端兴奋地输入第一行Tesseract命令,却看到刺眼的Failed loading language chi_sim报错时,那种挫败感我深有体会。这个看似简单的错误背后,往往隐藏着路径配置、文…...
:LiveZoom 实时放大——无闪屏放大与多屏演示技巧)
《Sysinternals实战指南》ZoomIt 学习笔记(11.12):LiveZoom 实时放大——无闪屏放大与多屏演示技巧
🔥个人主页:杨利杰YJlio❄️个人专栏:《Sysinternals实战教程》《Windows PowerShell 实战》《WINDOWS教程》《IOS教程》《微信助手》《锤子助手》 《Python》 《Kali Linux》 《那些年未解决的Windows疑难杂症》🌟 让复杂的事情更…...

CANN-Ascend-C存储体系-昇腾NPU的四级缓存怎么用才算对
写 Ascend C 算子,最常犯的错误不是计算写错,是数据搬运写错。昇腾NPU有四级存储,每一级的容量、带宽、延迟都不同。数据该放在哪一级、什么时候搬、搬多少,直接决定算子性能。 四级存储级别名称容量带宽延迟用途L0HBM(…...

Spine骨骼动画集成:Unity 2D游戏性能优化实战指南
1. 为什么Spine不是“另一个动画插件”,而是2D游戏性能分水岭在Unity里做2D游戏,很多人卡在同一个地方:角色动起来很卡,美术给的PSD切图动效一多就掉帧,UI动画和角色动画抢资源,打包后APK体积暴涨——你试过…...