香橙派 AIpro开发体验:使用YOLOV8对USB摄像头画面进行目标检测
香橙派 AIpro开发体验:使用YOLOV8对USB摄像头画面进行目标检测
- 前言
- 一、香橙派AIpro硬件准备
- 二、连接香橙派AIpro
- 1. 通过网线连接路由器和香橙派AIpro
- 2. 通过wifi连接香橙派AIpro
- 3. 使用vscode 通过ssh连接香橙派AIpro
- 三、USB摄像头测试
- 1. 配置ipynb远程开发环境
- 1.1 创建一个video.ipynb 文件
- 1.2 在远程主机中安装jupyter插件和python 插件
- 2. 使用opencv读取USB摄像头进行拍照
- 3. 使用opencv读取USB摄像头进行实时拍摄显示
- 四、使用yolov8进行目标检测
- 1. 使用torch cpu推理yolov8
- 2. 使用opencv推理onnx模型
- 2.1 导出yolov8的onnx模型
- 2.2 onnx推理
- 3. 使用npu 推理yolov8
- 3.1 onnx转换为OM模型
- 3.2 添加交换空间
- 3.3 npu推理
- 五、总结
- 六、参考
前言
YOLOv8 作为最新的目标检测算法,以其高精度、高速度和易用性,成为许多开发者首选。而香橙派 AIpro 作为一款高性能嵌入式开发板,采用昇腾AI技术路线,集成图形处理器,拥有8GB/16GB LPDDR4X,8/20 TOPS AI算力,为 AI 应用提供了坚实的硬件基础。本篇文章将分享使用香橙派 AIpro 和 YOLOv8 结合 USB 摄像头进行物体检测的实战经验,并探讨其在实际应用中的价值。
一、香橙派AIpro硬件准备
香橙派 AIpro 开发板、USB 摄像头、电源适配器,网线,micro SD卡预烧录ubuntu系统。

二、连接香橙派AIpro
1. 通过网线连接路由器和香橙派AIpro
为了确保香橙派AIpro与网络的稳定连接,我们采用网线将其直接接入路由器。随后,在电脑上运行ip扫描器对内网进行全面扫描,成功识别到设备“orangepiaipro”,其IP地址为192.168.1.7。

2. 通过wifi连接香橙派AIpro
我们在登录香橙派AIpro之后,可以参照以下方法进行wifi的连接。
扫描wifi
sudo nmcli dev wifi
连接wifi
sudo nmcli dev wifi connect wifi名称 password wifi密码
3. 使用vscode 通过ssh连接香橙派AIpro
Tip:使用vscode可以像本地开发一样 ,在香橙派AIpro上进行远程开发。
安装vscode 插件
1.Remote - SSH
2.Remote - SSH: Editing
3.Remote Explorer

创建一个ssh连接,用户名默认为HwHiAiUser,登录密码默认为Mind@123
ssh HwHiAiUser@192.168.1.7

我们连接上之后打开桌面文件夹,在桌面进行开发

选择桌面路径

同时我们打开终端

三、USB摄像头测试
1. 配置ipynb远程开发环境
1.1 创建一个video.ipynb 文件

创建好之后保存在桌面文件夹内,vscode会同步这个目录的文件,方便我们进行开发。


1.2 在远程主机中安装jupyter插件和python 插件
我们对这两个主要的插件进行安装,其他插件会自动安装上。

然后我们打开video.ipynb 文件 选择我们需要的python版本。
python3.10.12 是系统自动的python版本。
base(python 3.9.2) 是anaconda的基础python版本。
我们应该使用conda 环境,最好是新建conda环境,来避免可能出现的环境依赖问题。

2. 使用opencv读取USB摄像头进行拍照
我们可能会遇到无法读取摄像头的错误,是因为没有权限访问摄像头。

直接对摄像头的权限进行降级,让当前用户可以访问
sudo chmod 666 /dev/video0
我们在video.ipynb中进行代码编写,可以直接显示摄像头画面
import cv2
from IPython.display import display, Imagecamera = cv2.VideoCapture(0)
camera.set(cv2.CAP_PROP_FOURCC,cv2.VideoWriter_fourcc('M','J','P','G'))
if not camera.isOpened():raise IOError("Impossible d'ouvrir la webcam")
ret, frame = camera.read()
if not ret:raise IOError("Impossible de capturer une image")
display(Image(data=cv2.imencode('.jpg', frame)[1]))
camera.release()
运行效果如下:

3. 使用opencv读取USB摄像头进行实时拍摄显示
我们在video.ipynb中进行如下python代码编写,可以直接显示摄像头画面
import cv2
import numpy as np
from IPython.display import display, clear_output,Image# Initialize the camera
camera = cv2.VideoCapture(0) # Use 0 for the default camera
# Set the codec to MJPG if it is supported
if camera.isOpened():camera.set(cv2.CAP_PROP_FOURCC, cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'))
else:raise IOError("Cannot open the webcam")
try:while True:# Capture frame-by-frameret, frame = camera.read()if not ret:raise IOError("Cannot capture frame")# Display the imageclear_output(wait=True)# Afficher l'image capturéedisplay(Image(data=cv2.imencode('.jpg', frame)[1]))
finally:# When everything done, release the capturecamera.release()
本次使用的usb摄像头帧率比较低,所以有拖影,但从实时性的体验上来说,还是非常不错的。
四、使用yolov8进行目标检测
1. 使用torch cpu推理yolov8
本次测试使用的版本为yolov8.2 ,首先将yolov8中的ultralytics文件夹拖到香橙派AIpro的桌面上。

然后在video.ipynb中进行代码编写,调用yolov8库进行推理
import cv2
import numpy as np
from IPython.display import display, clear_output,Image
from ultralytics import YOLO
from time import time
# Load a model
model = YOLO('yolov8n.pt') # pretrained YOLOv8n model
# Initialize the camera
camera = cv2.VideoCapture(0) # Use 0 for the default camera
# Set the codec to MJPG if it is supported
if camera.isOpened():# camera.set(cv2.CAP_PROP_FRAME_WIDTH, 1280.0)# camera.set(cv2.CAP_PROP_FRAME_HEIGHT, 720.0)camera.set(cv2.CAP_PROP_FOURCC, cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'))
else:raise IOError("Cannot open the webcam")
try:while True:# Capture frame-by-frameret, frame = camera.read()if not ret:raise IOError("Cannot capture frame")s = time()results = model(frame,conf=0.25,iou=0.5,verbose=False)print(time()-s)for r in results:im = r.plot()# Display the imageclear_output(wait=True)# Afficher l'image capturéedisplay(Image(data=cv2.imencode('.jpg', im)[1]))
finally:# When everything done, release the capturecamera.release()
直接调用原始库推理速度约为0.5s 一次

香橙派AIpro直接调用yolov8库使用torch cpu进行推理,推理时占用2核cpu,整体占用50%,如果多线程实现应该在0.2s左右,就是4-5帧。推理时内存占用也不高,表现还是不错的。

2. 使用opencv推理onnx模型
2.1 导出yolov8的onnx模型

2.2 onnx推理
编写python代码,使用opencv dnn推理onnx模型并读取usb摄像头进行检测
import cv2
import numpy as np
from IPython.display import display, clear_output,Image
from time import time
import cv2.dnn
from ultralytics.utils import ASSETS, yaml_load
from ultralytics.utils.checks import check_yaml
CLASSES = yaml_load(check_yaml('coco128.yaml'))['names']
colors = np.random.uniform(0, 255, size=(len(CLASSES), 3))
model: cv2.dnn.Net = cv2.dnn.readNetFromONNX("yolov8n.onnx")def draw_bounding_box(img, class_id, confidence, x, y, x_plus_w, y_plus_h):label = f'{CLASSES[class_id]} ({confidence:.2f})'color = colors[class_id]cv2.rectangle(img, (x, y), (x_plus_w, y_plus_h), color, 2)cv2.putText(img, label, (x - 10, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, color, 2)def main(original_image):[height, width, _] = original_image.shapelength = max((height, width))image = np.zeros((length, length, 3), np.uint8)image[0:height, 0:width] = original_imagescale = length / 640blob = cv2.dnn.blobFromImage(image, scalefactor=1 / 255, size=(640, 640), swapRB=True)model.setInput(blob)outputs = model.forward()outputs = np.array([cv2.transpose(outputs[0])])rows = outputs.shape[1]boxes = []scores = []class_ids = []for i in range(rows):classes_scores = outputs[0][i][4:](minScore, maxScore, minClassLoc, (x, maxClassIndex)) = cv2.minMaxLoc(classes_scores)if maxScore >= 0.25:box = [outputs[0][i][0] - (0.5 * outputs[0][i][2]), outputs[0][i][1] - (0.5 * outputs[0][i][3]),outputs[0][i][2], outputs[0][i][3]]boxes.append(box)scores.append(maxScore)class_ids.append(maxClassIndex)result_boxes = cv2.dnn.NMSBoxes(boxes, scores, 0.25, 0.45, 0.5)detections = []for i in range(len(result_boxes)):index = result_boxes[i]box = boxes[index]detection = {'class_id': class_ids[index],'class_name': CLASSES[class_ids[index]],'confidence': scores[index],'box': box,'scale': scale}detections.append(detection)draw_bounding_box(original_image, class_ids[index], scores[index], round(box[0] * scale), round(box[1] * scale),round((box[0] + box[2]) * scale), round((box[1] + box[3]) * scale))# Initialize the camera
camera = cv2.VideoCapture(0) # Use 0 for the default camera
# Set the codec to MJPG if it is supported
if camera.isOpened():# camera.set(cv2.CAP_PROP_FRAME_WIDTH, 1280.0)# camera.set(cv2.CAP_PROP_FRAME_HEIGHT, 720.0)camera.set(cv2.CAP_PROP_FOURCC, cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'))
else:raise IOError("Cannot open the webcam")
try:while True:# Capture frame-by-frameret, frame = camera.read()if not ret:raise IOError("Cannot capture frame")s = time()main(frame)print(time()-s)# Display the imageclear_output(wait=True)# Afficher l'image capturéedisplay(Image(data=cv2.imencode('.jpg', frame)[1]))finally:# When everything done, release the capturecamera.release()
onnx推理使用单核cpu,推理一次的速度约为0.7s

3. 使用npu 推理yolov8
3.1 onnx转换为OM模型
将ONNX模型转换为OM模型,用CANN提供的ATC工具将其转换为昇腾AI处理器能识别的OM模型。
atc --framework=5 --model=yolov8n.onnx --input_format=NCHW --output=yolov8n --soc_version=Ascend310B4
atc命令中各参数的含义如下:
–framework:原始框架类型,5表示ONNX。
–model:ONNX模型文件存储路径。
–input_format:输入的格式定义
–output:离线om模型的路径以及文件名。
–soc_version:昇腾AI处理器的型号。
在服务器种执行npu-smi info命令进行查询,在查询到的“Name”前增加Ascend信息,例如“Name”对应取值为310B4,实际配置的–soc_version值为Ascend310B4。

3.2 添加交换空间
若出现以下错误则是内存不足,可以添加交换空间
BrokenPipeError: [Errno 32] Broken pipe
/usr/local/miniconda3/lib/python3.9/multiprocessing/resource_tracker.py:216: UserWarning: resource_tracker: There appear to be 97 leaked semaphore objects to clean up at shutdown
warnings.warn('resource_tracker: There appear to be %d ’
- 使用 root 用户执行:
su -
- 创建一个用于交换空间的文件,创建8GB的交换文件:
mkswap /swapfile
- 设置交换文件
mkswap /swapfile
- 启用交换空间
swapon /swapfile
- 编辑/etc/fstab文件,使交换空间开机自动挂载:
echo '/swapfile none swap defaults 0 0' >> /etc/fstab
6.验证交换空间是否生效
free -m
通过top监控可以看到 转换过程占用内存大概 12G左右,不添加虚拟缓存内存是不够用的。

3.3 npu推理
编写python代码使用npu推理yolov8 对usb摄像头进行检测
import os# Verify the path
print(os.environ['LD_LIBRARY_PATH'])
import cv2
import numpy as np
from IPython.display import display, clear_output,Image
from time import time
from ais_bench.infer.interface import InferSession
from ultralytics.utils import ASSETS, yaml_load
from ultralytics.utils.checks import check_yamlCLASSES = yaml_load(check_yaml('coco128.yaml'))['names']colors = np.random.uniform(0, 255, size=(len(CLASSES), 3))model = InferSession(device_id=0, model_path="yolov8n.om")def draw_bounding_box(img, class_id, confidence, x, y, x_plus_w, y_plus_h):label = f'{CLASSES[class_id]} ({confidence:.2f})'color = colors[class_id]cv2.rectangle(img, (x, y), (x_plus_w, y_plus_h), color, 2)cv2.putText(img, label, (x - 10, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, color, 2)def main(original_image):[height, width, _] = original_image.shapelength = max((height, width))image = np.zeros((length, length, 3), np.uint8)image[0:height, 0:width] = original_imagescale = length / 640blob = cv2.dnn.blobFromImage(image, scalefactor=1 / 255, size=(640, 640), swapRB=True)begin_time = time()outputs = model.infer(feeds=blob, mode="static")end_time = time()print("om infer time:", end_time - begin_time)outputs = np.array([cv2.transpose(outputs[0][0])])rows = outputs.shape[1]boxes = []scores = []class_ids = []for i in range(rows):classes_scores = outputs[0][i][4:](minScore, maxScore, minClassLoc, (x, maxClassIndex)) = cv2.minMaxLoc(classes_scores)if maxScore >= 0.25:box = [outputs[0][i][0] - (0.5 * outputs[0][i][2]), outputs[0][i][1] - (0.5 * outputs[0][i][3]),outputs[0][i][2], outputs[0][i][3]]boxes.append(box)scores.append(maxScore)class_ids.append(maxClassIndex)result_boxes = cv2.dnn.NMSBoxes(boxes, scores, 0.25, 0.45, 0.5)detections = []for i in range(len(result_boxes)):index = result_boxes[i]box = boxes[index]detection = {'class_id': class_ids[index],'class_name': CLASSES[class_ids[index]],'confidence': scores[index],'box': box,'scale': scale}detections.append(detection)draw_bounding_box(original_image, class_ids[index], scores[index], round(box[0] * scale), round(box[1] * scale),round((box[0] + box[2]) * scale), round((box[1] + box[3]) * scale))# Initialize the camera
camera = cv2.VideoCapture(0) # Use 0 for the default camera# Set the codec to MJPG if it is supported
if camera.isOpened():# camera.set(cv2.CAP_PROP_FRAME_WIDTH, 1280.0)# camera.set(cv2.CAP_PROP_FRAME_HEIGHT, 720.0)camera.set(cv2.CAP_PROP_FOURCC, cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'))
else:raise IOError("Cannot open the webcam")# Define the codec and create VideoWriter object
# Get the width and height of the frames
frame_width = int(camera.get(cv2.CAP_PROP_FRAME_WIDTH))
frame_height = int(camera.get(cv2.CAP_PROP_FRAME_HEIGHT))
print(f"Frame width: {frame_width}, Frame height: {frame_height}")# Define the codec and create VideoWriter object
fourcc = cv2.VideoWriter_fourcc(*'XVID')
out = cv2.VideoWriter('output.avi', fourcc, 30.0, (frame_width, frame_height)) # 20.0 is the frame ratetry:_start_time = time()while time() - _start_time < 5:# Capture frame-by-frameret, frame = camera.read()if not ret:raise IOError("Cannot capture frame")main(frame)out.write(frame)# Display the image# clear_output(wait=True)# # Afficher l'image capturée# display(Image(data=cv2.imencode('.jpg', frame)[1]))finally:# When everything done, release the capturecamera.release()out.release()
与前面torch和onnx 的推理相比,基于昇腾CANN的推理效果,在速度上有了质的飞跃。

yolov8使用npu推理一帧的速度达到了惊人的0.017s,相比cpu提升了20-30倍。

五、总结
昇腾CANN框架的优势:
- 推理速度显著提升: 在使用YOLOv8模型进行推理时,我发现昇腾CANN的单帧处理速度能达到0.017秒,相比CPU提升了20-30倍,这对于实时性要求高的应用场景(如自动驾驶、安防监控)至关重要。
- 兼容性与扩展性强: 昇腾CANN支持多种模型和算法,并随着昇腾硬件的升级不断提升性能,为开发者提供了更广阔的选择空间。
香橙派AIpro开发板的优势: - 硬件性能出色: 能够流畅运行复杂的AI算法和模型,满足我的开发需求。
- 易用性高: 简单的设置和配置就能将AI应用部署到开发板上进行测试和验证,极大提升了开发效率。
- 扩展性强: 丰富的接口方便连接其他硬件设备,为开发更复杂的AI应用提供了更多可能性。
总的来说,我对其高效的推理速度、便捷的开发体验以及强大的扩展性印象深刻。
香橙派AIpro开发板为开发者提供了一个优秀的平台,可以方便地体验和利用昇腾CANN强大的AI推理能力。我相信,随着昇腾CANN和香橙派AIpro开发板的不断发展,它们将进一步推动AI技术的应用和普及。
六、参考
CANN开发指南
香橙派官网
昇腾论坛
相关文章:
香橙派 AIpro开发体验:使用YOLOV8对USB摄像头画面进行目标检测
香橙派 AIpro开发体验:使用YOLOV8对USB摄像头画面进行目标检测 前言一、香橙派AIpro硬件准备二、连接香橙派AIpro1. 通过网线连接路由器和香橙派AIpro2. 通过wifi连接香橙派AIpro3. 使用vscode 通过ssh连接香橙派AIpro 三、USB摄像头测试1. 配置ipynb远程开发环境1.…...

Python中正则表达式详解
Python中正则表达式详解 引言 正则表达式是一种用于字符串搜索和操作的强大工具。它使用单个字符串来描述、匹配一系列符合某个句法规则的字符串。在Python中,正则表达式通过内置的re模块来实现,使得文本处理变得简洁而高效。 正则表达式基础 在深入…...

vue使用EventBus进行跨组件通信
Vue中的EventBus,又称为事件总线,是一种常用的通信模式,它允许在Vue应用程序的不同组件之间进行松耦合的通信,尤其是对于那些没有直接父子关系的组件间的通信非常有用。EventBus基于Vue的自定义事件系统实现,工作原理遵…...

boot项目中定时任务quartz
最近换项目组,发现项目中定时任务使用的是quartz框架,上一篇文章[springboot定时任务]也是使用的quartz,只不过实现方式不同,于是整理下 定时任务常用方法有Quartz,Spring自带的Schedule框架 Quartz基础知识 quartz…...

使用阿里云OSS实现视频上传功能
目录 前言 视频上传 前言 阿里云对象存储服务(OSS)作为一种高可用、高扩展性的云端存储服务,为开发者提供了便捷、安全的对象存储解决方案。本文将介绍如何利用阿里云OSS实现视频上传功能。 视频上传 前期准备请看阿里云OSS文件上传和下载…...

LOTO示波器软件新增导览功能
新版本的大部分型号LOTO示波器的上位机软件我们改成了导航工具条方式。原来的方式是把所有功能都显示在不同的标签页中,这样的优点是非常快捷方便,基本上用鼠标一两次点击就能直达想要的功能设置。但是缺点是不熟练的客户可能记不住各种功能的标签位置在…...

【StructueEngineering】SYMBOL SCHEDULE
文章目录 标记表列SYMBOL SCHEDULELINES线条COLUMN REFERENCE SYMBOL柱参考标记SECTION REFERENCE SYMBOLS剖面参考标记DETAILREFERENCE SYMBOLS详图参考标记GENERALELEVATIONSYMBOLS一般立面图标记MISCELLANEOUS SYMBOLS杂项标记 STEEL FRAMING SYMBOLS钢结构平面图标记COLUMN…...

简化跨网文件传输摆渡过程,降低IT人员工作量
在当今数字化时代,IT企业面临着日益增长的数据交换需求。随着网络安全威胁的不断演变,网关隔离成为了保护企业内部网络不受外部威胁的重要手段。然而,隔离的同时,企业也需要在不同网络间安全、高效地传输文件,这就催生…...

关于python中屏蔽输出
python中屏蔽输出包含屏蔽标准输出(比如打印出来的内容)、屏蔽标准错误(错误信息)还有屏蔽logging信息等。 屏蔽标准输出 import contextlib import oswith open(os.devnull, "w") as devnull:with contextlib.redire…...
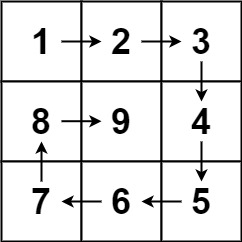
螺旋矩阵(算法题)
文章目录 螺旋矩阵解题思路 螺旋矩阵 给你一个正整数 n ,生成一个包含 1 到 n2 所有元素,且元素按顺时针顺序螺旋排列的 n x n 正方形矩阵 matrix 。 示例 1: 输入:n 3 输出:[[1,2,3],[8,9,4],[7,6,5]]解题思路 模…...

ffmpeg-webrtc(metartc)给ffmpeg添加webrtc协议
这个是使用metrtc的库为ffmpeg添加webrtc传输协议,目前国内还有一个这样的开源项目,是杨成立大佬,大师兄他们在做,不过wili页面维护的不好,新手不知道如何使用,我专门对它做过介绍,另一篇博文&a…...

C语言知识大纲
一、基础 (一)变量定义和使用 (二)数据类型的字节数 (三)变量转换 (四)程序主要结构 (五)if和else判断 (六)switch判断 (七)while循环 (八)do while循环 (九)for循环 (十)基本输入输出 (十一)数组定义和使用 (十二)函数定义和使用 (十三)指针 (十四)多级指针 (十…...

【必会面试题】synchronized锁升级的过程
目录 Java中的synchronized关键字用于实现同步控制,以保护共享资源免受并发访问的影响。为了提高性能,特别是针对多线程环境中的锁机制,Java引入了锁升级的概念。锁升级的过程主要是为了减少锁操作的开销,根据竞争情况动态地调整锁…...

设计模式——工厂三兄弟之简单工厂
1.业务需求 大家好,我是菠菜。在介绍这期简单工厂设计模式前,我们先来看看这样的需求:制作一个简单的计算器,能够实现控制台输入俩个数以及运算符完成运算。 2.初步实现 实现第一版思路: 创建计算器类&…...

如何使用ChatGPT撰写短视频爆款文案
在这个快速发展的数字时代,短视频已经成为最受欢迎的娱乐和信息获取方式之一。对于内容创作者来说,如何制作出爆款短视频,吸引更多观众的注意力,是他们面临的一大挑战。文案,作为视频内容的灵魂,起着至关重…...

申办风景园林设计乙级资质如何整理技术人员的专业培训证明
整理技术人员的专业培训证明是申办风景园林设计乙级资质的重要环节,它直接关系到证明技术人员持续学习和专业能力提升的情况。以下是整理专业培训证明的一些建议步骤: 收集培训记录:首先,向所有参与设计工作的技术人员收集他们参加…...
类别型特征
#机器学习 #深度学习 #基础知识 #特征工程 #数据编码 背景 在现实生活中,我们面对的数据类型有很多,其中有的数据天然为数值类型具备数值意义,那么可以很自然地和算法结合,但是大部分数据他没有天然的数值意义,那么将他们送入到算法前,就需要对数据进行编码处理,将其转换为数…...

java医院管理系统源码(springboot+vue+mysql)
风定落花生,歌声逐流水,大家好我是风歌,混迹在java圈的辛苦码农。今天要和大家聊的是一款基于springboot的医院管理系统。项目源码以及部署相关请联系风歌,文末附上联系信息 。 项目简介: 医院管理系统的主要使用者分…...

vue2 面试题
一、.vue的性能优化怎么做? 1.编码优化: 不要把所有的数据都放在data中;v-for时给每个元素绑定事件用事件代理;keep-alive缓存组件;尽可能拆分组件,提高复用性、维护性;key值要保证唯一&#…...

【JavaEE精炼宝库】多线程(3)线程安全 | synchronized
目录 一、线程安全 1.1 经典线程不安全案例: 1.2 线程安全的概念: 1.3 线程不安全的原因: 1.3.1 案例刨析: 1.3.2 线程不安全的名词解释: 1.3.3 Java 内存模型 (JMM): 1.3.4 解决线程不安全问题: 二…...

windows VS2026 编译32位 onnxRuntime
打开命令行终端,执行以下命令克隆官方仓库并初始化子模块(--recursive 参数非常重要,否则会因为缺少依赖导致编译失败):git clone --recursive https://github.com/microsoft/onnxruntime.git进入目录:cd o…...

激光器物理理论模型:从经典到量子,工程师如何选择?
1. 激光器物理理论模型全景概览激光,这束高度相干、单色、定向的光,其诞生与运作背后,是一套极其精密的物理法则。对于从事光电子、激光技术研发,乃至物理研究的工程师和学者而言,理解这些法则的不同描述层次ÿ…...
)
STM32矩阵按键详解——4×4行列扫描与非阻塞消抖(硬件总结六)
前言 独立按键虽然简单,但当产品需要十几个按键时,每个按键独占一个GPIO的接法就变得很不经济。矩阵按键通过“行列”的交叉结构,仅用NM个GPIO即可驱动NM个按键。以最常见的44矩阵为例,16个按键仅需8个GPIO,引脚利用率…...

用于参数扫描的自定义工具
能够改变光学系统的参数是任何设置分析的关键部分,以便更好地了解系统在从制造错误到组件潜在错位的任何情况下的行为。设计一个在面对这些不可避免的偏离理想化预期设计时表现出鲁棒性的系统,与找到一个完全满足所有规范的初始设计一样重要,…...

网页端嵌入 Agent 对接前端方案
本文将深入探讨「网页端嵌入AI」的核心概念与实战技巧,帮助你快速掌握关键要点。让我们开始吧! 网页端嵌入 Agent 对接前端方案 1. 引言 当前前端项目正从被动展示走向主动交互,AI Agent 嵌入网页端可自动化 UI 操作、优化布局并辅助编码。…...

RAG 检索到了还是答错:从一个线上事故讲透 RAG 数据工程全链路
一个合同问答系统的线上事故 某企业法务团队上线了一套合同问答系统。用户问:“渠道商季度返点的计算条件是什么?” 系统返回了三段参考文档,生成了一段看起来完整的回答。法务审核时发现:引用的是 2024 年旧版渠道政策…...

雷达信号体制识别
雷达信号体制识别 摘要 本文档基于工程中的信号识别流水线入口脚本及其所依赖的核心模块,系统梳理该工程如何实现雷达脉冲信号的体制分类(Signal Type Recognition)。该流水线采用“脉冲检测 → 脉冲描述字提取 → 脉内特征分析 → 驻留段分段…...
步骤)
【文档编辑】打印小册子(一张A4纸4页内容)步骤
效果如下,使用“A4纸”打印变成“每一页是A5大小的翻页小册子”1、打开word格式说明书,另存为pdf格式(如果文件是pdf格式忽略步骤1) 2、用wps打开pdf文件 3、打印→打印方式:小册子→小册子子集:仅正面→装…...

如何3步搭建你的私人游戏云:Sunshine游戏串流服务器终极指南
如何3步搭建你的私人游戏云:Sunshine游戏串流服务器终极指南 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine Sunshine是一款开源的自托管游戏串流服务器,专…...

5分钟上手Real-ESRGAN:让模糊图片瞬间清晰的AI图像增强神器
5分钟上手Real-ESRGAN:让模糊图片瞬间清晰的AI图像增强神器 【免费下载链接】Real-ESRGAN Real-ESRGAN aims at developing Practical Algorithms for General Image/Video Restoration. 项目地址: https://gitcode.com/gh_mirrors/re/Real-ESRGAN 你是否曾为…...