Point-Nerf 理论笔记和理解
文章目录
- 什么是point nerf 和Nerf 有什么区别
- Point Nerf 核心结构有哪些?
- 什么是point-based radiance field?
- 点云位置以及置信度是怎么来
- Point pruning 和 Point Growing
什么是point nerf 和Nerf 有什么区别
基本的nerf 是通过过拟合MLP来完成任意视角场景的重建,这有什么问题呢? 这样会导致模型的训练很慢且完全没有泛化能力。训练出来模型只能用于一个场景的重建。 且Nerf的输入只能是 照片以及相机位姿。但是point nerf 可以使用点云作为输入并且考虑到了每一个点对应的2D features。这个有什么好处呢。他可以省去大量sample的过程。因为在原始的nerf中,我们是不知道场景到底在3D空间中的什么地方,所以我们需要使用对光线进行大量的采样,来大致理解3D场景的位置,而point nerf 因为可以使用点云作为输入,点云中的每一个点都可以理解成场景的一部分,所以我们可以对这些点周围的点进行采样。point nerf 使用相对位置计算特征比起nerf完全使用绝对位置来说,繁华能力有所提高。
Point Nerf 核心结构有哪些?
什么是point-based radiance field?
和nerf相似的点是他们的目的都是要去计算 view-dependent volume density。Nerf 直接使用mlp 进行硬拟合,但是point nerf 使用了neural point来计算这个东西。 neural point 包含三个东西,点的空间位置,点对应的特征,以及它的置信度。 特征是怎么来的。因为知道相机位姿,所以我们可以把3D 点投射到2D feature plane去然后取得每一个点的特征,这就是pixel-aligned features。置信度代表着什么? 置信度表示的是当前这个点在场景表面的可能性有多大。
point-based radiance field怎么获得? 给到任意的一个3D点的位置,我们在这个点的R半径范围内,进行K最近邻采样,然后把这K个点的位置,view direction, 2D features, confidence 一起输入到 point nerf 中去获得 volume density 以及 radiance。 简单来说就是,先处理每一个点,然后再把每一个点相邻的信息整合起来。

为了提高泛化能力,每一个点的特征是需要重新根据相对位置来计算的。之前的点特征是使用的绝对位置,没有 point translation invariant。具体就是使用另一个MLP把特征和相对位置一起做计算即可。
然后需要使用点与shading location的距离来对这些点进行权重的计算,如果说一个点离shading location特别远,那么它对于重建的贡献也就很小,所以它的权重相对就比较低。volume density 和 radiance的计算首先都要使用方法来对点进行权重计算。

点云位置以及置信度是怎么来
点云的位置其实是通过深度的unprojection得到的。那么深度是怎么来的呢? 使用MVSnet或者类似的网络。具体怎么做?深度可以表示成物体离相机的距离,或者是两张照片的视差。MVSnet 使用两张或多张相邻的照片,用2D CNN来提取每一张照片的2D特征, 然后和传统MVS算法一样,使用plane sweeping 的方式,将相邻照片的特征图sweep到 reference image 的 plane上面。这样就可以比较两个feature maps之间到底差了多少,这种差值就是cost volume,它已经包括了视差信息,所以用这个cost volume就可以预测深度信息。文中是用的depth probablity volume,用于表示point confidence。这个过程可以表示成:

Point pruning 和 Point Growing
这两个方法主要是用于点的处理。前者会根据点的权重来筛选点,也就是说如果点的距离离场景的距离特别的远,那么对于场景的贡献就会变低。这时候就可以将这个点删去,来完成剪枝。此外输入的点云有可能会出现不完整的情况,这个时候就需要将点云补全。通过一条光线上点的可见度来判断这个位置需不需要增加点。判断的条件就是一个点确实是在surface 周边的但是离其他的点很远。
相关文章:
Point-Nerf 理论笔记和理解
文章目录 什么是point nerf 和Nerf 有什么区别Point Nerf 核心结构有哪些?什么是point-based radiance field? 点云位置以及置信度是怎么来Point pruning 和 Point Growing 什么是point nerf 和Nerf 有什么区别 基本的nerf 是通过过拟合MLP来完成任意视角场景的重…...

深度学习中的梯度消失和梯度爆炸问题
在深度学习领域,随着模型层数的增加,我们常常会遇到两个棘手的问题:梯度消失(Vanishing Gradients)和梯度爆炸(Exploding Gradients)。这两个问题严重影响了深度神经网络的训练效率和性能。本文…...
Flink 通过 paimon 关联维表,内存降为原来的1/4
你好,我是 shengjk1,多年大厂经验,努力构建 通俗易懂的、好玩的编程语言教程。 欢迎关注!你会有如下收益: 了解大厂经验拥有和大厂相匹配的技术等 希望看什么,评论或者私信告诉我! 文章目录 一…...
Python知识详解【1】~{正则表达式}
正则表达式是一种用于匹配字符串模式的文本工具,它由一系列普通字符和特殊字符组成,可以非常灵活地描述和处理字符串。以下是正则表达式的一些基本组成部分及其功能: 普通字符:大多数字母和数字在正则表达式中表示它们自己。例如…...
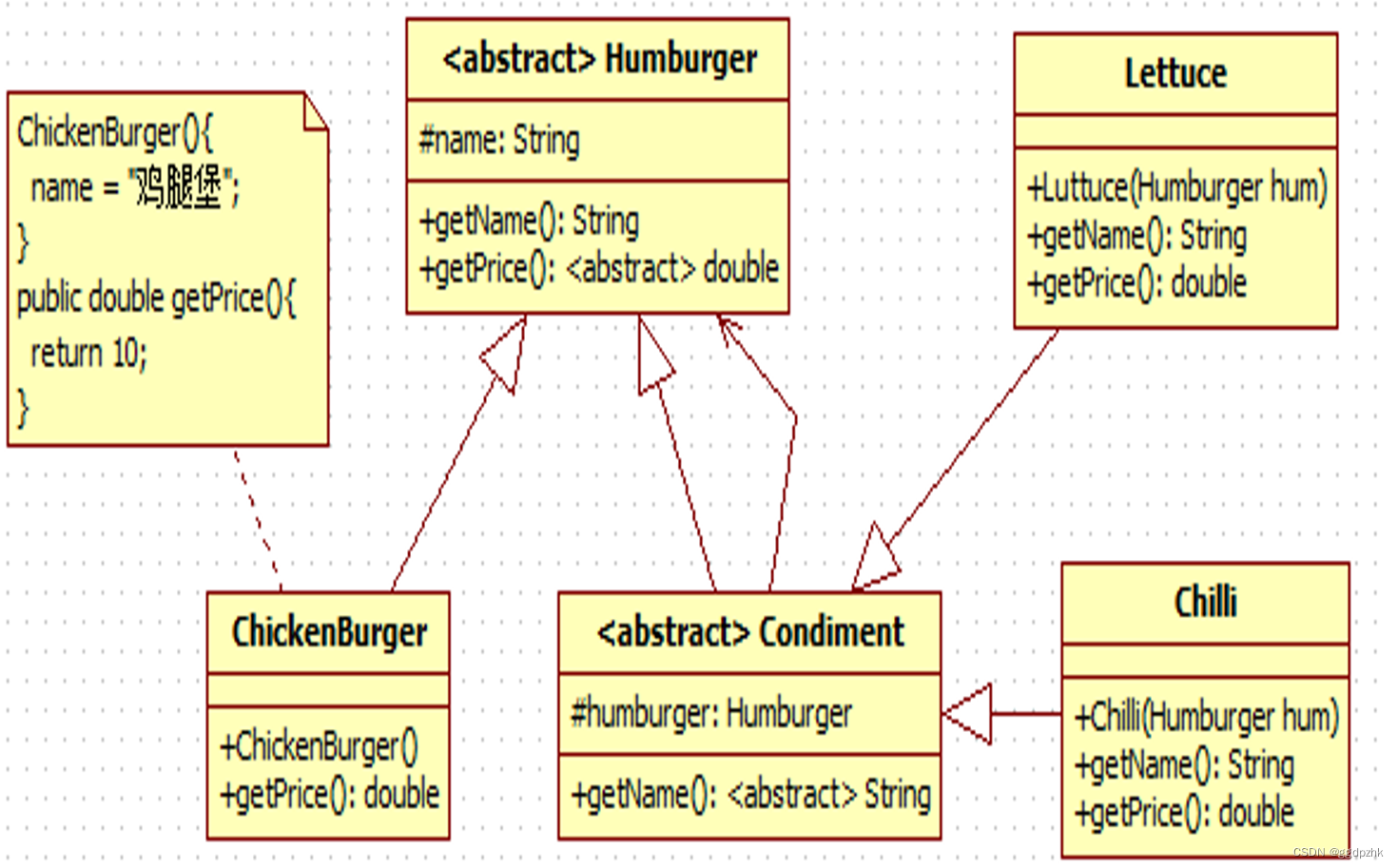
装饰模式:鸡腿堡
文章目录 UML类图目录结构Humburger.javaChickenBurger.javaCondiment.javaChuilli.javaLettuce.javaTest.java深度理解test怎么写 UML类图 目录结构 我们从指向最多的开始写 Humburger.java package zsms;public abstract class Humburger {protected String name;public S…...
视图【mysql数据库】
目录 一、视图的创建、查看、修改、删除 二、cascaded、local检查选项 cascaded和local的区别 三、视图的更新 四、视图的作用 一、视图的创建、查看、修改、删除 二、cascaded、local检查选项 上面的几句SQL中,我们虽然给视图插入了id 30的数据,但…...
函数)
opencv的findContours()函数
来自WaTab AI Pro 请详细解释cv2.findContours(): cv2.findContours() 是 OpenCV 中用于检测图像轮廓的函数。轮廓可以看作是将连续的点(沿边界)连接在一起的一条曲线,具有相同的颜色或强度。该函数常用于图像处理和计算机视觉中…...
多电压档hold扫尾
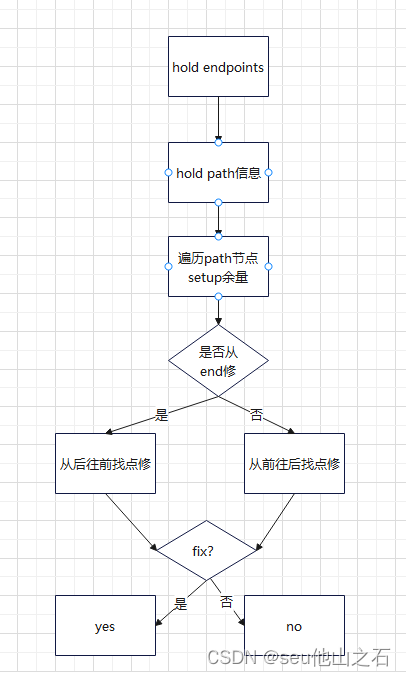
MMMC下STA收敛更为困难,setup通过DMSA可以很好的得到收敛;但是常规的时序修复工具很难通过工具得到最终clean的时序状态,本文介绍一种多模多角下hold的收敛方法。 该方法主要通过遍历hold路径上多电压setup的余量,支持从前往后和从…...
ABAP Json解析案例
ABAP解析返回的JSON 案例 DATA:LTOKEN TYPE STRING.DATA: LL_LINES(10),"行数LL_TABIX(10),"循环标号LL_PECNT TYPE P LENGTH 6 DECIMALS 2, "百分比LL_PECET(6),"百分数LL_TEXT(40)."消息CLEAR: LL_LINES,LL_TABIX,LL_PECNT,LL_PECET,LL_TEXT.* …...
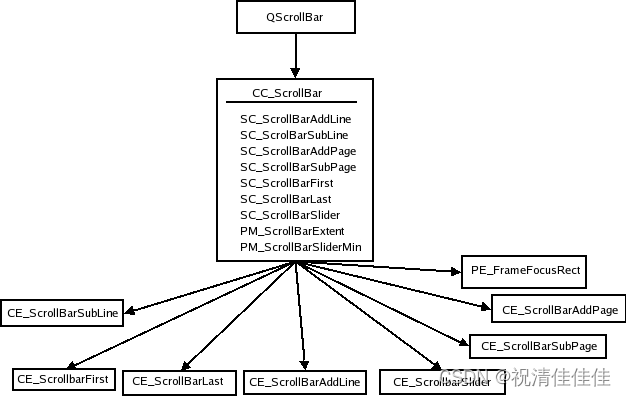
QT学习(20):QStyle和自定义样式
QStyle 样式(继承自QStyle类)代表控件的绘制并封装GUI的外观。QStyle是一个封装了GUI外观的抽象基类。Qt使用QStyle去执行几乎所有的内置控件的绘制,确保控件外观和原生控件风格风格相同。 class Q_WIDGETS_EXPORT QStyle : public QObject{…...

香橙派 AIpro 昇腾 Ascend C++ 分类模型适配
香橙派 AIpro 昇腾 Ascend C 分类模型适配 flyfish 文章目录 香橙派 AIpro 昇腾 Ascend C 分类模型适配前言一、PyTorch官网resnet模型处理方式1、PyTorch模型 导出 onnx格式2、完整测试 输出top1结果3、完整测试 输出top5结果 二、YOLOv8官网resnet模型Python处理方式三、昇腾…...
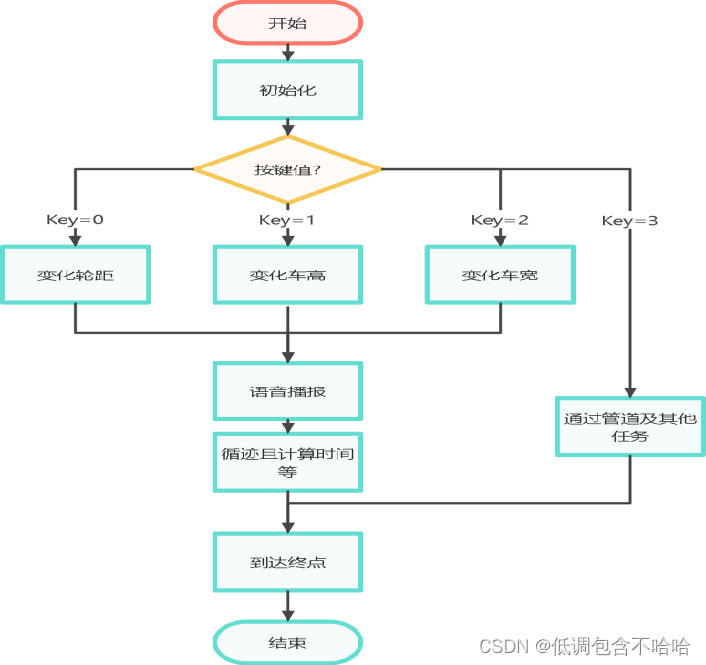
2024吉林省电赛(达盛杯)
1. 电赛F4系统板3D图 提起自制STM32F407VET6系统板 2. 电赛原理图 3. 电赛PCB图 4. 智能车实物图 下图是电赛的实物图,结构采用3D打印 5. 软件设计 下图是程序设计图 6. 仿真视频 (1) 变化高度 2024吉林省电赛仿真1 (2) 变化轮距 2024电赛仿真2 7. APP控制小车 …...
【算法题】520 钻石争霸赛 2024 全解析
都是自己写的代码,发现自己的问题是做题速度还是不够快 520-1 爱之恒久远 在 520 这个特殊的日子里,请你直接在屏幕上输出:Forever and always。 输入格式: 本题没有输入。 输出格式: 在一行中输出 Forever and always…...

Yii 结合MPDF 给PDF文件添加多行水印
首先确保安装了mpdf扩展 composer require mpdf/mpdf public function createWaterPdf($file_path,$water_text){date_default_timezone_set(PRC);ini_set(memory_limit, 6400M);ini_set(max_execution_time, 0);try{$mpdf new Mpdf();$pageCount $mpdf->SetSourceFile…...
你什么时候感觉学明白Java了?
学是学不明白Java的,要学明白Java,一定只能在工作以后。 1 在学习阶段,哪怕是借鉴别人的学习路线,其实依然会学很多不必要的技能,比如jsp,swing,或者多线程,或者设计模式。 2 或者…...
马斯克xAI融资60亿美元,宣布打造世界第一超算中心,10万张H100GPU
昨天,埃隆马斯克的xAI初创公司宣布获得60亿美元的巨额融资,主要用于打造一台巨大的超级计算机,马斯克称之为“超级计算工厂”。 从创立OpenAI到如今的xAI,技术和算力的发展历经了几个时代,但似乎马斯克的吸金能力一直…...

贪心算法[1]
首先用最最最经典的部分背包问题来引入贪心的思想。 由题意可知我们需要挑选出价值最大的物品放入背包,价值即单位价值。 我们需要计算出每一堆金币中单位价值。金币的属性涉及两个特征,重量和价值。 所以我们使用结构体。 上代码。 #include <i…...

卢文岩博士受邀参与中国科学院大学校友论坛 解码DPU核心价值
近日,第五届中国科学院大学校友创新论坛正式举行,本次论坛聚焦科技前沿领域,旨在搭建高端对话平台,促进产学研深度融合。在大算力时代——AI技术前沿沙龙上,中科驭数高级副总裁、CTO卢文岩博士受邀分享《DPU——连接算…...
2024年上半年软件设计师试题及答案(回忆版)
目录 基础知识选择题案例题1.缺陷识别的数据流图2.球队、球员、比赛记录的数据库题3.用户、老师、学生、课程用例图4.算法题5.程序设计题基础知识选择题 树的节点,度为4的有4个,度为3的有8个,度为2个有6个,度为1的有10个,问有几个叶子结点 二位数组,一个元素2个字节,A0…...

QGIS使用python代码导出给定坐标图片
代码基于https://blog.csdn.net/x572722344/article/details/108121230进行修改,代码在QGIS内部编译器运行 # -*- coding: utf-8 -*- from osgeo import ogr# 像素[高, 宽] px_geosize [2.645859085290482, 2.6458015267176016]# 待裁剪影像的坐标范围[min_x, min…...

5步掌握BG3SE:让《博德之门3》成为你的创意画布
5步掌握BG3SE:让《博德之门3》成为你的创意画布 【免费下载链接】bg3se Baldurs Gate 3 Script Extender 项目地址: https://gitcode.com/gh_mirrors/bg/bg3se BG3SE(博德之门3脚本扩展器) 是一款革命性的开源工具,它通过L…...

离散数学自然推理系统通关秘籍:从零开始手把手教你搞定Educoder所有证明题
离散数学自然推理系统通关秘籍:从零到精通的实战指南 1. 自然推理系统入门基础 对于初次接触离散数学自然推理系统的学习者来说,那些复杂的符号和规则往往让人望而生畏。但请记住,每个专家都曾是初学者。自然推理系统本质上是一种形式化的逻…...

终极指南:如何快速搭建基于AI的微信智能机器人
终极指南:如何快速搭建基于AI的微信智能机器人 【免费下载链接】wechat-bot 🤖一个基于 WeChaty 结合 ChatGPT / Claude / Kimi / DeepSeek / Ollama等Ai服务实现的微信机器人 ,可以用来帮助你自动回复微信消息,或者社群分析/好友…...
)
Perplexity物理检索突然失灵?2024Q3模型更新引发的3类知识断层(附中科院物理所认证的降级兼容方案)
更多请点击: https://intelliparadigm.com 第一章:Perplexity物理知识查询 Perplexity 是一款基于大语言模型的实时知识检索工具,其核心能力在于融合权威学术资源(如 arXiv、APS、IOP、NASA ADS 等)与动态网页索引&am…...

51单片机电子秤的语音播报怎么选?JQ8400模块 vs OTP芯片,实测成本与易用性对比
51单片机电子秤语音方案实战选型:JQ8400模块与OTP芯片的深度拆解 在智能硬件开发中,语音交互功能正从锦上添花的附加项逐渐变为核心用户体验的关键组成部分。以51单片机电子秤为例,语音播报功能不仅能提升产品的无障碍使用体验,还…...

函数依赖的核心概念解析[数据库原理]
函数依赖的定义与核心概念 函数依赖(Functional Dependency,简称FD)是关系数据库理论中用于描述属性间数据约束的核心概念。它定义了一个关系模式(Relation Schema)中,一个属性(或属性组&#…...

避坑指南:在CentOS 7上部署泛微Ecology9 OA,我踩过的那些“内存不足”和“防火墙”的坑
CentOS 7部署泛微Ecology9 OA系统:从内存优化到防火墙配置的深度避坑指南 在Linux环境下部署企业级OA系统从来都不是一件简单的事情,尤其是像泛微Ecology9这样功能复杂的大型系统。表面上看,官方文档和网络上的教程似乎已经提供了完整的步骤&…...

3分钟上手Windhawk:像安装App一样轻松定制Windows系统
3分钟上手Windhawk:像安装App一样轻松定制Windows系统 【免费下载链接】windhawk The customization marketplace for Windows programs: https://windhawk.net/ 项目地址: https://gitcode.com/gh_mirrors/wi/windhawk 你是否厌倦了Windows系统一成不变的界…...

如何快速提高能力
人机协作,AI模型:Deepseek仅供参考如何快速提高能力在快节奏的现代社会中,每个人都渴望快速提升自己的能力,无论是职场竞争力、专业技能,还是通用素养。能力的提升并非一蹴而就,但遵循科学有效的方法&#…...

别再只会复制代码了!STM32F103 HAL库驱动RC522 RFID模块的底层SPI通信原理解析
深入解析STM32F103 HAL库驱动RC522的SPI通信机制 当开发者第一次接触RFID模块时,往往会被各种现成的驱动库所吸引——复制粘贴几行代码,模块就能工作,这确实很诱人。但当你遇到通信不稳定、数据错误或者需要优化性能时,仅靠"…...