大模型时代的具身智能系列专题(六)
UCSD 王小龙组
王小龙是UCSD电子与计算机工程系的助理教授。他曾在加州大学伯克利分校与Alexei Efros和Trevor Darrell一起担任博士后研究员,在CMU RI获得了机器人学博士学位,师从Abhinav Gupta。他的研究重点是通过视频和物理机器人交互数据来学习3D和动态表示。促进机器人技能的学习,目标是使机器人能够在真实物理世界中与各种对象和环境有效互动。近期其团队分别在仿真和数据层面提出GenSim,Open X-Embodiment。
主题相关作品
- GenSim
- Open X-Embodiment
- ExBody
GenSim
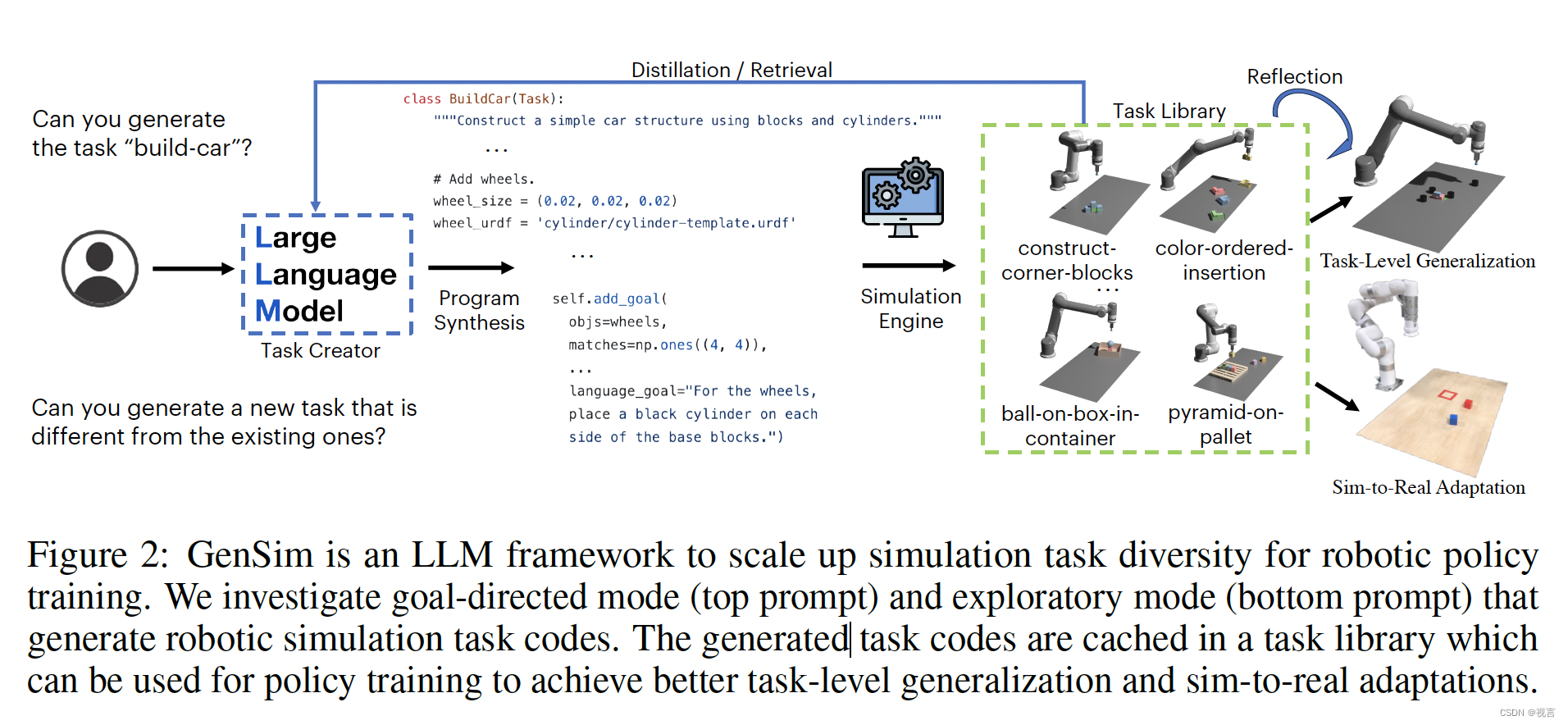
现有的数据生成方法通常侧重于场景级多样性(例如,对象实例和姿势),而不是任务级多样性,因为提出和验证新任务需要人工努力。这使得在模拟数据上训练的策略很难证明其significant任务级泛化。在本文中,我们提出通过利用大型语言模型(LLM)的grounding和编码能力来自动生成丰富的仿真环境和专家演示。我们的方法,被称为GENSIM,有两种模式:目标导向生成,目标任务给到LLM, LLM提出一个任务课程来解决目标任务;探索性生成,在LLM中,从以前的任务中引导并迭代地提出有助于解决更复杂任务的新任务。我们使用GPT4将现有benchmark扩展了10倍,达到100多个任务,在此基础上我们进行了监督微调,并评估了几个LLM,包括微调的gpt和Code Llama,用于机器人仿真任务的代码生成。此外,我们观察到LLMs生成的仿真程序在用于多任务策略训练时可以显著增强任务级泛化。我们进一步发现,在最小的sim-to-real适配下,在gpt4生成的模拟任务上预训练的多任务策略表现出更强的向现实世界中看不见的长视界任务的转移,并且比基线高出25%。
策略学习的自动任务生成
task creator
任务创建者的目标是提出新的任务描述和相应的代码实现,可以进一步分解为场景生成和演示生成。我们使用Ravens benchmark,它专注于运动原语,如推和拾取,可以通过每个时间步的两个末端执行器姿态参数化。从图3中的示例来看,模拟环境代码中的重置函数有效地初始化了资产及其属性和姿态,和参数化每个步骤动作的空间和语言目标一样。在探索性任务生成设置中,将提示pipeline生成与现有任务完全不同的新任务。在目标导向设置中,pipeline的目的是填充任务描述和指定任务名称的实现。探索性方法需要创造性和推理能力来提出新的任务,而目标导向方法侧重于将模拟编码作为一个特定的任务。
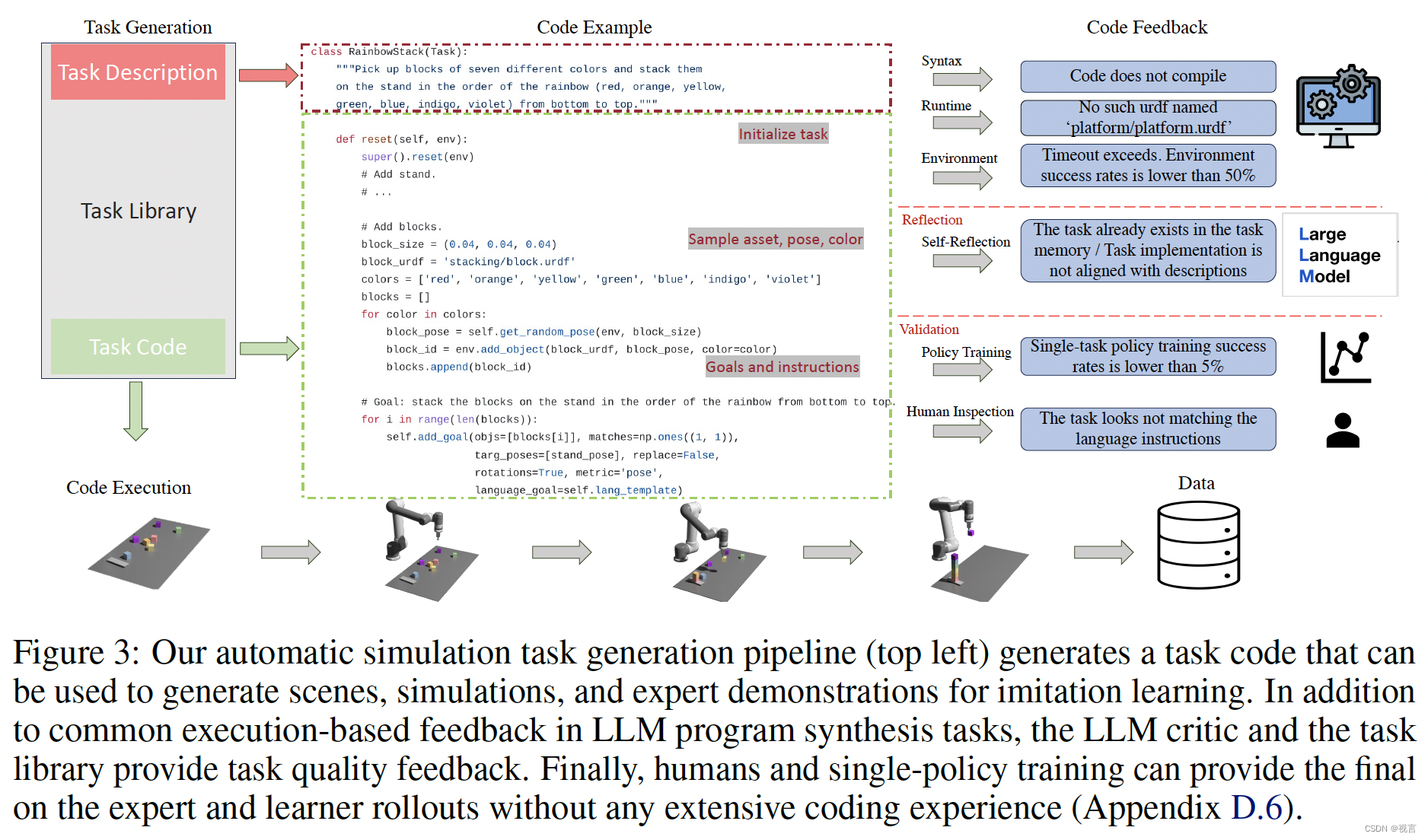
在这两种设置中(图3),语言链首先生成任务描述,然后生成相关的实现。任务描述包括任务名称、资产和任务摘要。我们在pipeline中采用少量提示来生成代码。将提示LLM从任务库中的现有任务中检索参考任务和代码。这个过程对于LLM确切地知道如何实现任务类(例如首先采样资产URDFs和构建场景的过程,然后添加空间目标和语言目标)至关重要。与其他LLM编码任务相比,机器人模拟中有各种各样的反馈形式,包括执行pipeline、模拟器、策略培训和人类。
TASK LIBRARY
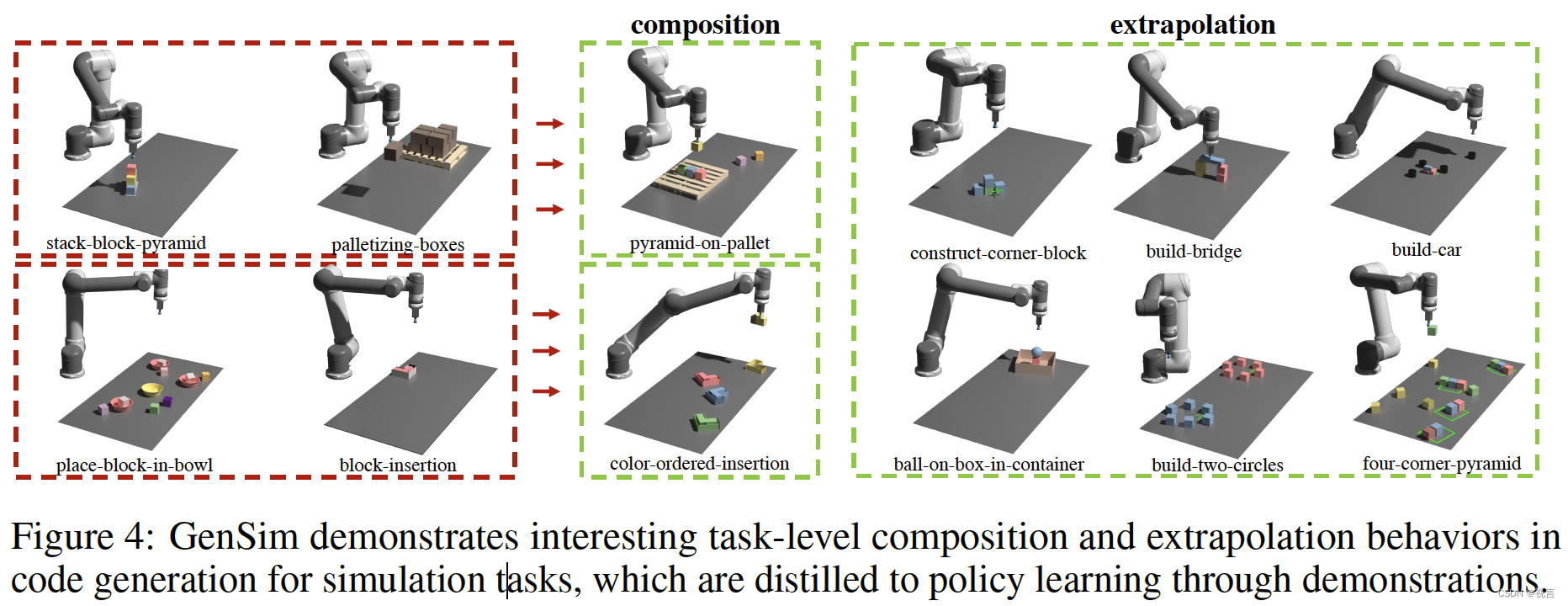
在GenSim框架中,我们利用一个外部内存,称为任务库,来检索由任务创建者生成的任务,以提出更好的新任务,并训练多任务策略。任务库是从人工管理benchmark中的任务初始化的。它为任务创建者在描述生成阶段提供了过去的任务描述列表为条件,在代码生成阶段提供过去代码列表。然后,提示任务创建者从任务库中检索参考任务,作为编码新任务的示例,即检索增强生成(RAG)。在任务实现完成并能够成功生成演示之后,我们提示LLM对新任务和任务库进行反思,并就是否应该将新生成的任务添加到库中形成一个集成决策。在图4中,我们在GenSim生成的任务中观察到有趣的组合和外推行为。这些保存的任务代码可以离线使用,以生成用于多任务策略训练的演示轨迹数据。
在探索模式下生成的任务库可以用作迭代训练任务创建者的引导数据,以在目标导向模式下生成更好的模拟任务。这对于扩展任务生成和纳入人类反馈非常重要,因为使用微调模型作为任务创建者更经济。
LLM监督的多任务策略
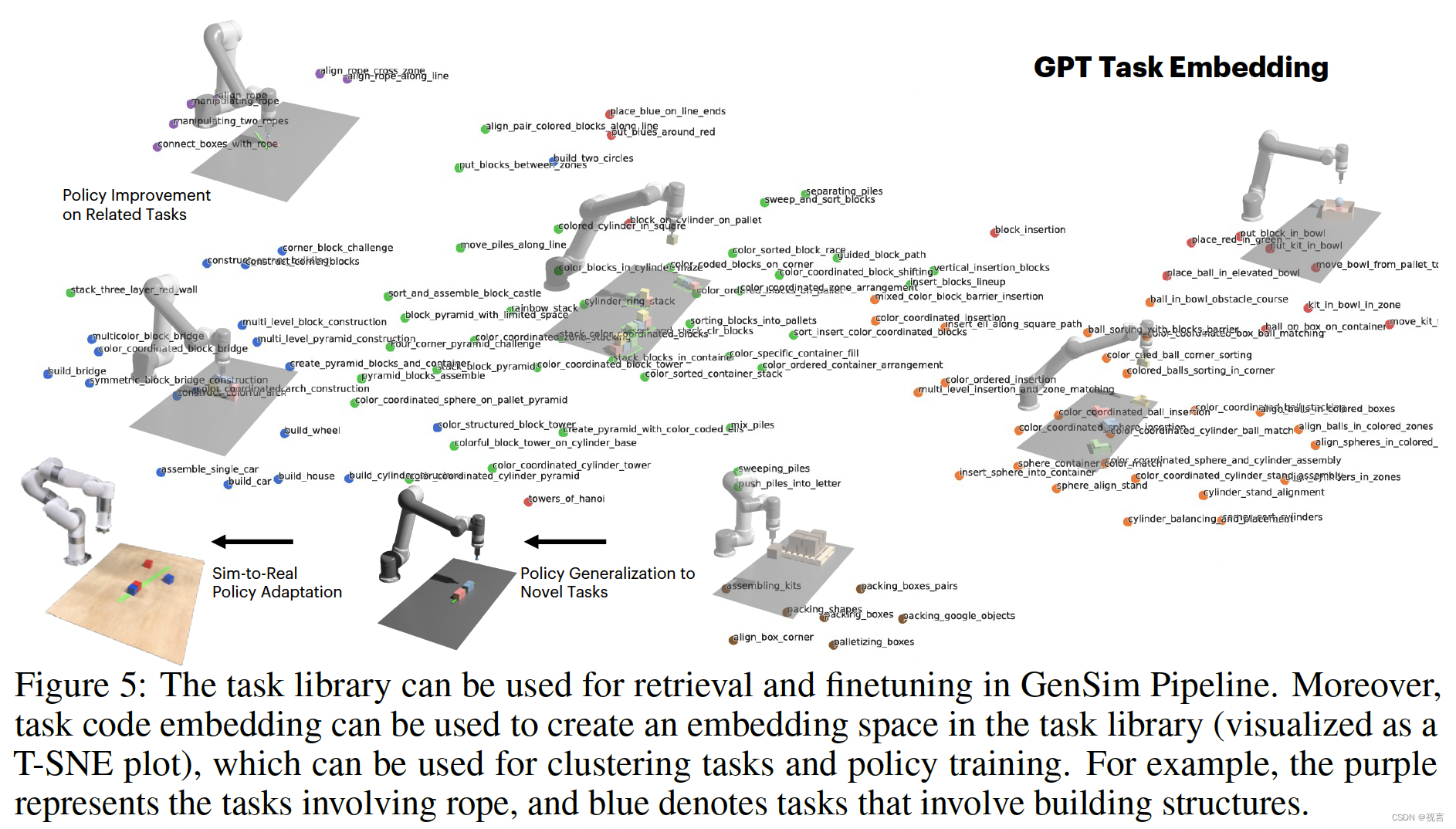
一旦生成了任务,我们就可以使用这些任务实现来生成演示数据和训练操作策略。我们使用双流传输网络架构,通过可用性预测来参数化策略。从代码生成到语言条件行为克隆的过程可以看作是从LLM到机器人策略低级控制和环境操作可能性的蒸馏过程。将程序视为任务和相关演示数据的有效表示(图5),我们可以定义任务之间的嵌入空间,其距离度量对诸如物体姿态和形状等感知因素的变化更为稳健,但比语言指令更具信息性。
实验
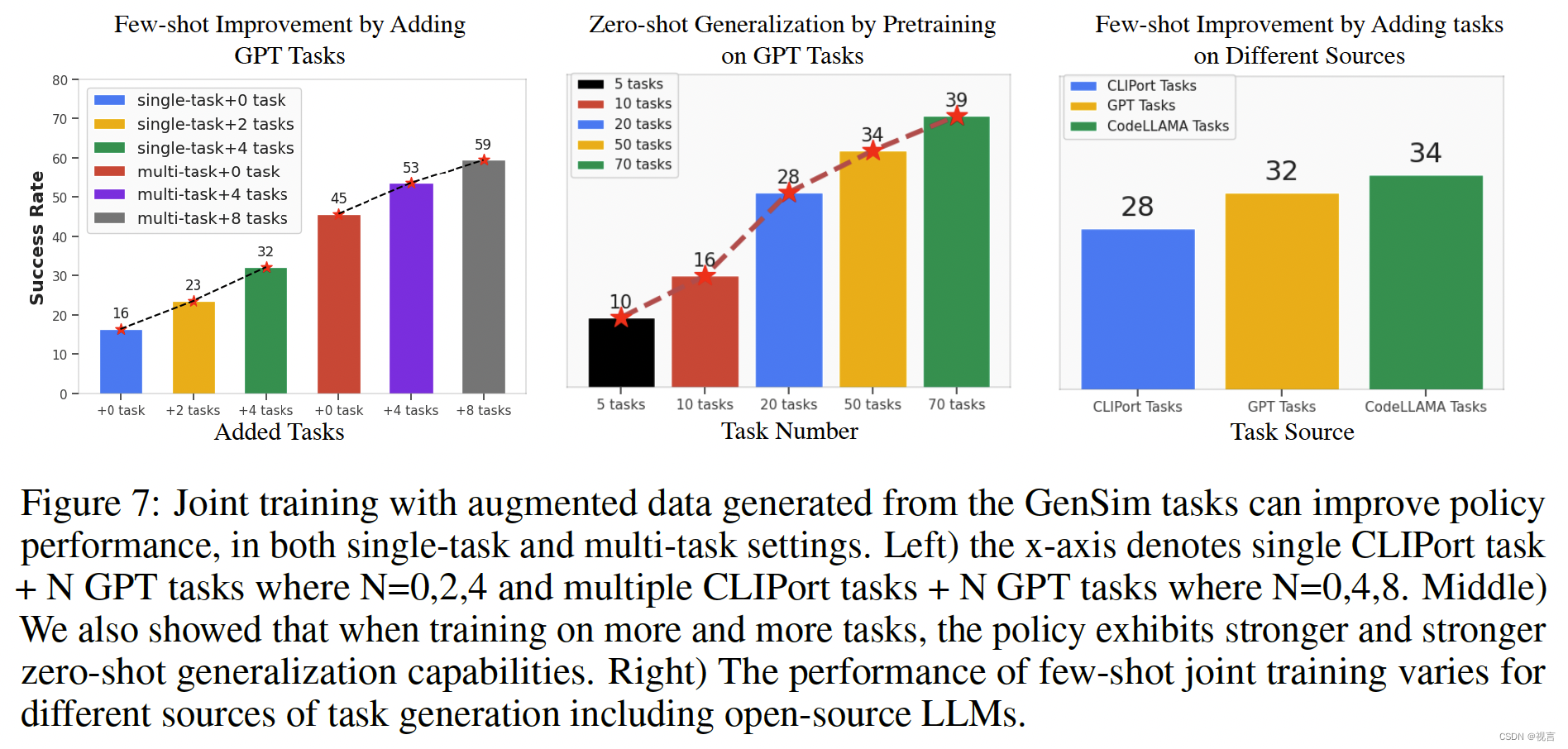
回答三个问题:LLM能否设计实现仿真任务以及能否提高LLM任务生成的性能?LLM生成的任务能否提高策略泛化性以及是否生成任务越多越好?在LLM生成的仿真任务上预训练能否在迁移到真实世界时产生策略部署的收益?
评估LLM机器人仿真任务生成
具体来说,我们测量“语法正确”的通过率序列,“语法正确”测量了基本的编码语法问题以及答案格式问题,“运行时验证”测试了资产幻觉和代码推理能力,最后“任务完成”测量了任务演示的设计(选择位置运动的成功)。这些指标显示在图6的x轴中。我们的指标具有从语法到运行时的增量结构,以成功地生成演示,其中前一个指标失败意味着后一个指标失败。为了将这些任务生成能力提炼成更经济和可扩展的语言模型,并潜在地进行自我改进,我们使用任务库中的100个gpt4生成的任务作为调优的数据集。我们使用OpenAI API对GPT模型进行微调,并通过这个微调过程获得更好的性能。此外,我们还用LoRA 微调了开源LLMs,如Code-Llama。我们使用带有简短提示的任务名称作为输入tokens,任务代码作为自回归训练的输出tokens。
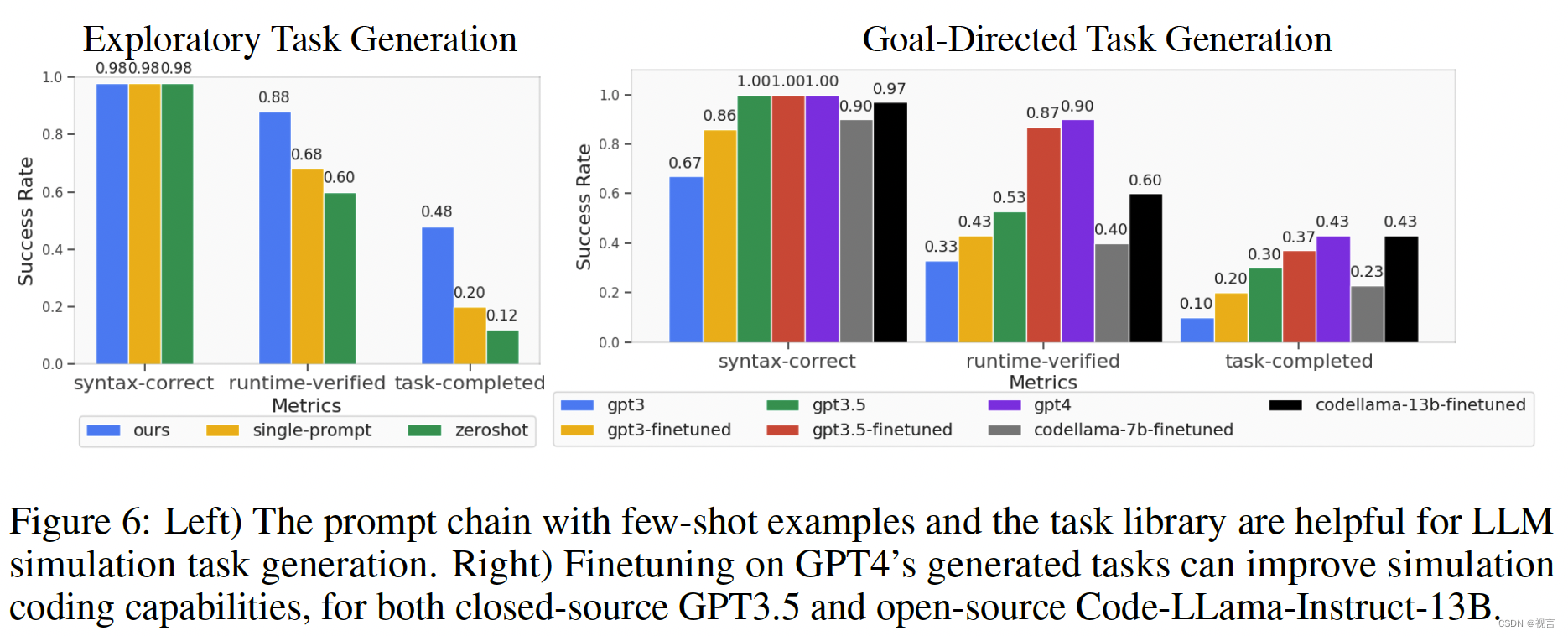
任务级生成
我们采用Ravens benchmark中提出的0(失败)到100(成功)分数,该benchmark考虑了完成任务的部分分数。仿真机器人设置为带有吸力夹持器的Universal robot UR5e。策略输入是自顶向下的RGB-D重建,输出是一个功能映射,然后将其转换为选择和放置操作。我们使用CLIPort架构,但是该框架独立于我们使用的策略参数化。测试任务集没有特别选择。我们发布了一个由GPT生成的语言条件benchmark(带有模型权重和任务列表),范围从10个任务到100个任务,用于研究具有环境可能性预测的scaling策略学习。
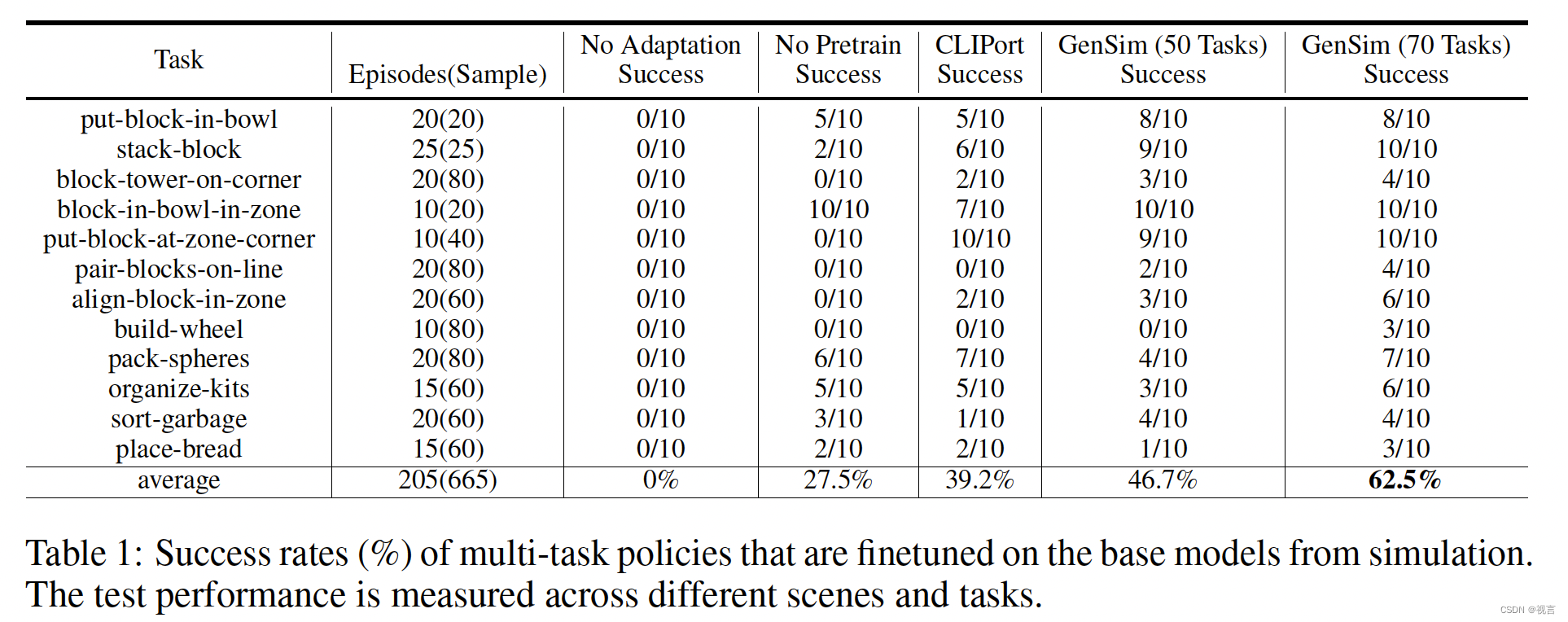
适配预训练模型到真实世界
我们假设,通过在模拟中扩展LLM生成的训练任务的多样性,训练后的策略将在现实场景中表现出更强的适应性。为了进一步增强从模拟到真实的过渡,我们结合了一个适应现实世界的过程。这个过程包括为每个任务收集一小部分真实世界的数据,然后对数据进行扩充,并对模拟预训练模型进行超过50次的微调。我们使用配备吸力钳的XArm-7机器人进行现实世界的实验。鸟瞰相机面朝下安装,捕捉RGB-D观测。在表1中,对70个gpt4生成的任务进行预训练的模型在12个任务的10次试验中实现了62.5%的平均成功率,与仅对CLIPort任务进行预训练的基线相比增加了20%以上,比仅对50个任务进行预训练的模型提高了15%。从质量上讲,没有充分预训练的基线模型通常会选择或放置错误的对象,而没有调整的基线会导致分散性预测。
总结
提出了GenSim,一个可扩展的LLM框架,以增强机器人策略的各种仿真任务,其目的是将LLM的基础和编码能力提炼到低级策略中。我们研究了目标导向和探索性方法中的LLM提示、检索增强生成和微调,以生成新的仿真任务代码。我们利用生成的任务来训练多任务策略,这些策略显示了对模拟和现实世界中的新任务的泛化能力。
局限性:生成的代码仍然包含基本的语法错误,并且存在幻觉,并且缺乏物理和几何细节的基础。另一个问题是代码生成评估度量是不完美的(例如不一致的语言描述),因此生成的任务可能需要在策略训练之前进行一些手动过滤。最后,我们只探索了桌面拾取和放置任务生成,生成灵巧和复杂的机器人任务可能更具挑战性。
相关文章:
大模型时代的具身智能系列专题(六)
UCSD 王小龙组 王小龙是UCSD电子与计算机工程系的助理教授。他曾在加州大学伯克利分校与Alexei Efros和Trevor Darrell一起担任博士后研究员,在CMU RI获得了机器人学博士学位,师从Abhinav Gupta。他的研究重点是通过视频和物理机器人交互数据来学习3D和…...
Pytorch入门需要达到的效果
会搭建深度学习环境和依赖包安装 使用Anaconda创建环境、在pytorch官网安装pytorch、安装依赖包 会使用常见操作,例如matmul,sigmoid,softmax,relu,linear matmul操作见文章torch.matmul()的用法 sigmoid࿰…...
数据结构的快速排序(c语言版)
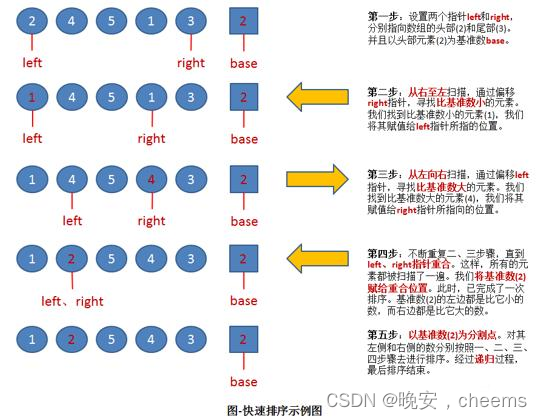
一.快速排序的概念 1.快排的基本概念 快速排序是一种常用的排序算法,它是基于分治策略的一种高效排序算法。它的基本思想如下: 从数列中挑出一个元素作为基准(pivot)。将所有小于基准值的元素放在基准前面,所有大于基准值的元素放在基准后面。这个过程称为分区(partition)操作…...
)
数据结构基础篇(4)
十六.循环链表 概念 循环链表是一种头尾相接的链表(最后一个结点的指针域指向头结点,整个链表形成一个环)优点 从表任一结点出发均可找到表中其他结点判断终止 由于循环链表中没有NULL指针,所以涉及遍历操作时,终止条…...
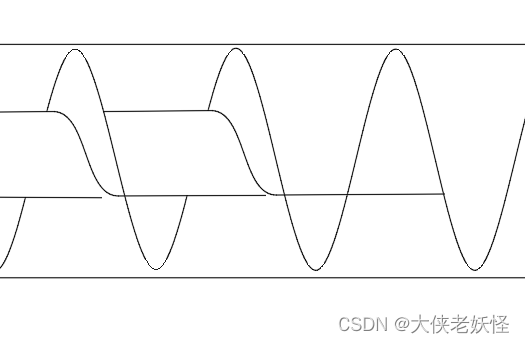
使用cad绘制一个螺旋输送机
1、第一步,绘制一个矩形 2、使用绘图中的样条线拟合曲线,绘制螺旋线。 绘制时使用上下辅助线、阵列工具绘制多个竖线保证样条线顶点在同一高度。 3、调整矩形右侧的两个顶点,使其变形。 矩形1和矩形2连接时,使用blend命令&#…...

迭代器模式(行为型)
目录 一、前言 二、迭代器模式 三、总结 一、前言 迭代器模式(Iterator Pattern)是一种行为型设计模式,提供一种方法顺序访问一个聚合对象中各个元素,而又不暴露该对象的内部表示。总的来说就是分离了集合对象的遍历行为,抽象出…...

Django——Admin站点(Python)
#前言: 该博客为小编Django基础知识操作博客的最后一篇,主要讲解了关于Admin站点的一些基本操作,小编会继续尽力更新一些优质文章,同时欢迎大家点赞和收藏,也欢迎大家关注等待后续文章。 一、简介: Djan…...

React 组件通信
1.从父组件向子组件传递参数: 父组件可以通过props将数据传递给子组件。子组件通过接收props来获取这些数据。 // 父组件 const ParentComponent () > {const data Hello, Child!;return <ChildComponent childData{data} />; }; // 子组件 const ChildCompone…...
【再探】设计模式—访问者模式、策略模式及状态模式
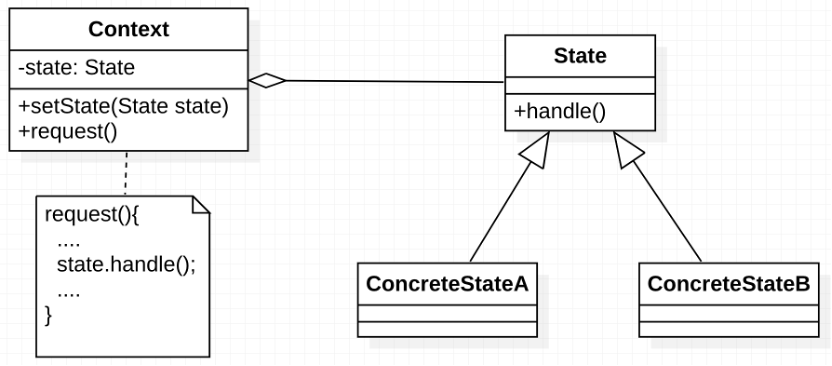
访问者模式是用于访问复杂数据结构的元素,对不同的元素执行不同的操作。策略模式是对于具有多种实现的算法,在运行过程中可动态选择使用哪种具体的实现。状态模式是用于具有不同状态的对象,状态之间可以转换,且不同状态下对象的行…...

新人硬件工程师,工作中遇到的问题list
新人硬件工程师能够通过面试,已经证明是能够胜任硬件工程师职责,当然胜任的时间会延迟,而不是当下,为什么呢?因为学校学习和公司做产品,两者之间有差异,会需要适应期。今天来看看新人硬件工程师…...

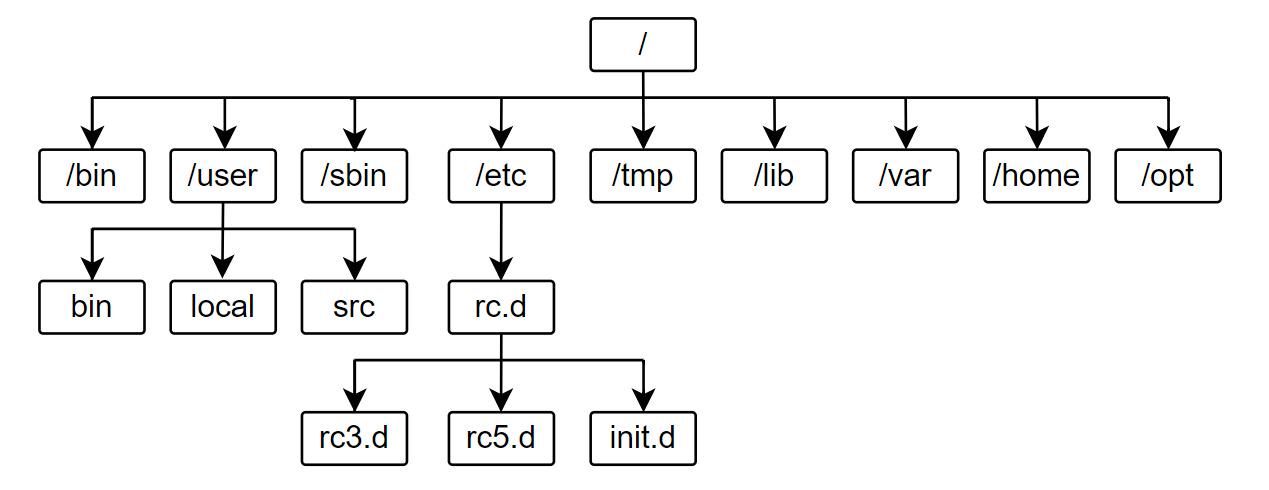
如何在Linux系统中搭建Zookeeper集群
一、概述 ZooKeeper是一个开源的且支持分布式部署的应用程序,是Google的Chubby一个开源的实现;它为分布式应用提供了一致性服务支持,包括:配置维护、域名服务、分布式同步、组服务等。 官网:https://zookeeper.apach…...

C++:vector的模拟实现
hello,各位小伙伴,本篇文章跟大家一起学习《C:vector的模拟实现》,感谢大家对我上一篇的支持,如有什么问题,还请多多指教 ! 如果本篇文章对你有帮助,还请各位点点赞!&…...
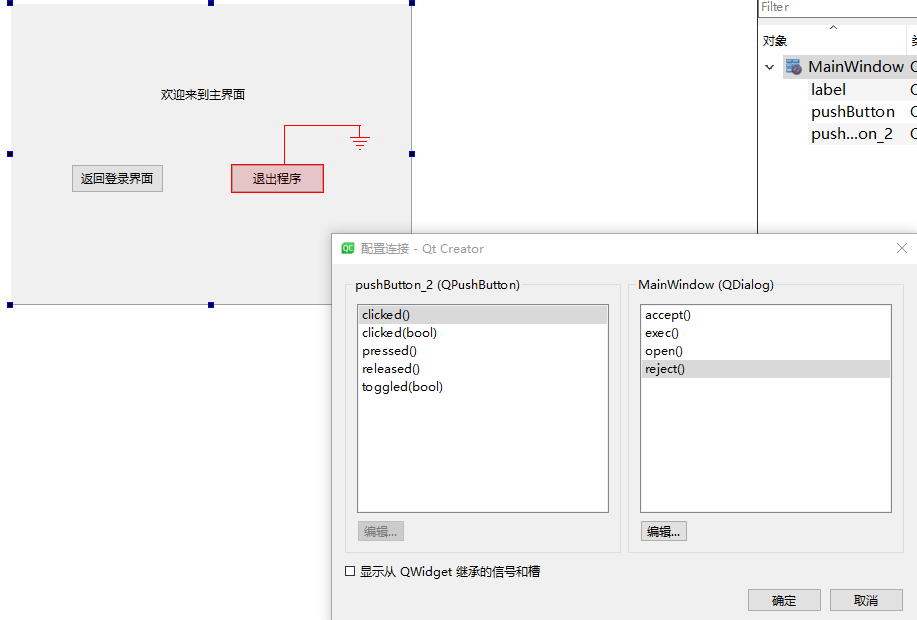
QT系列教程(5) 模态对话框消息传递
模态对话框接受和拒绝消息 我们创建一个模态对话框,调用exec函数后可以根据其返回值进行不同的处理,exec的返回值有两种,Qt的官方文档记录的为 QDialog::Accepted QDialog::RejectedAccepted 表示接受消息, Rejected表示拒绝消息…...
Linux学习笔记(清晰且清爽)
本文首次发布于个人博客 想要获得最佳的阅读体验(无广告且清爽),请访问本篇笔记 Linux安装 关于安装这里就不过多介绍了,安装版本是CentOS 7,详情安装步骤见下述博客在VMware中安装CentOS7(超详细的图文教…...
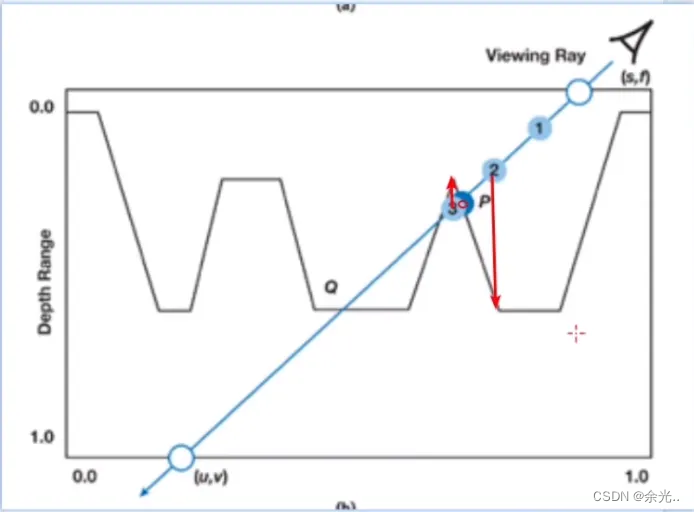
2.5Bump Mapping 凹凸映射
一、Bump Mapping 介绍 我们想要在屏幕上绘制物体的细节,从尺度上讲,一个物体的细节分为:宏观、中观、微观宏观尺度中其特征会覆盖多个像素,中观尺度只覆盖几个像素,微观尺度的特征就会小于一个像素宏观尺度是由顶点或…...

数字化前沿:Web3如何引领未来技术演进
在当今数字化时代,随着技术的不断发展和创新,Web3作为一种新兴的互联网范式,正逐渐成为数字化前沿的代表。Web3以其去中心化、加密安全的特性,正在引领着未来技术的演进,为全球范围内的科技创新带来了新的可能性和机遇…...
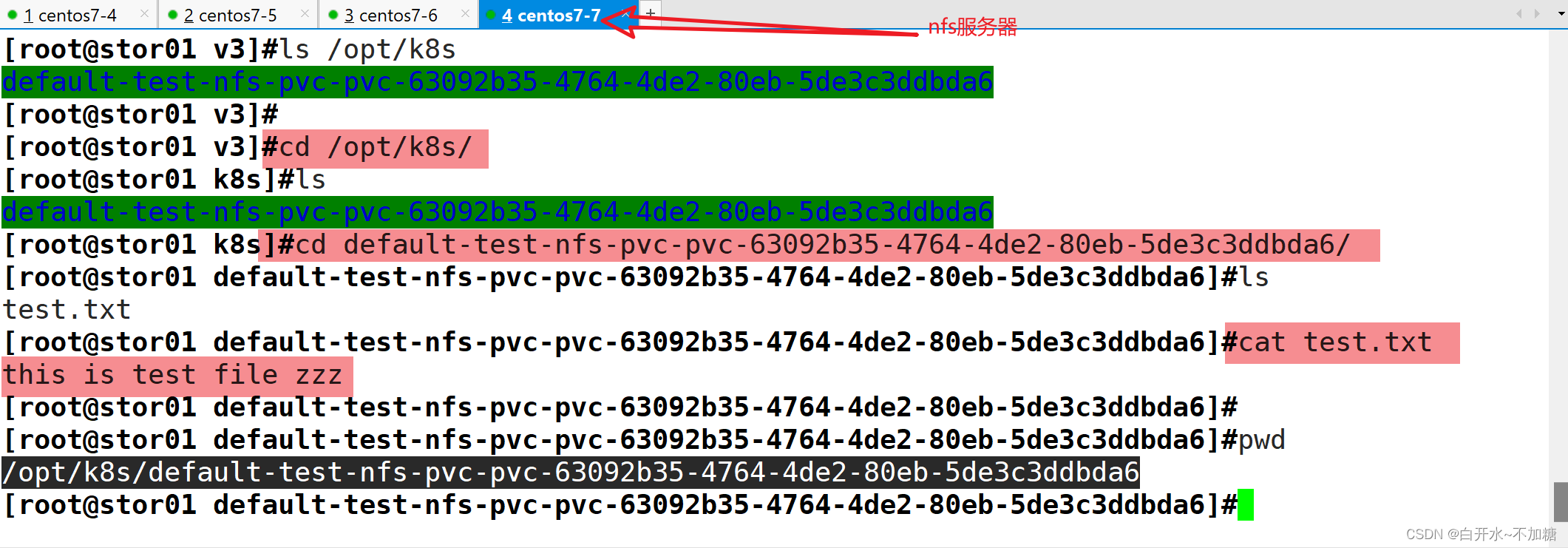
【kubernetes】探索k8s集群的存储卷、pvc和pv
目录 一、emptyDir存储卷 1.1 特点 1.2 用途 1.3部署 二、hostPath存储卷 2.1部署 2.1.1在 node01 节点上创建挂载目录 2.1.2在 node02 节点上创建挂载目录 2.1.3创建 Pod 资源 2.1.4访问测试 2.2 特点 2.3 用途 三、nfs共享存储卷 3.1特点 3.2用途 3.3部署 …...
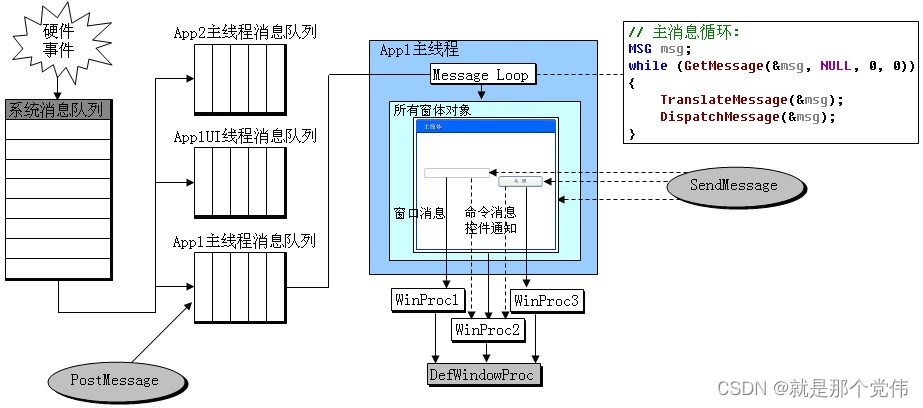
UI线程和工作线程
引用:windows程序员面试指南 工作线程 只处理逻辑的线程,例如:启动一个线程,用来做一个复杂的计算,计算完成之后,此线程就自动退出,这种线程称为工作线程 UI线程 Windows应用程序一般由窗口…...

RandLA-Net 训练自定义数据集
https://arxiv.org/abs/1911.11236 搭建训练环境 git clone https://github.com/QingyongHu/RandLA-Net.git搭建 python 环境 , 这里我用的 3.9conda create -n randlanet python3.9 source activate randlanet pip install tensorflow2.15.0 -i https://pypi.tuna.tsinghua.e…...

洛谷 B3642:二叉树的遍历 ← 结构体方法 链式前向星方法
【题目来源】https://www.luogu.com.cn/problem/B3642【题目描述】 有一个 n(n≤10^6) 个结点的二叉树。给出每个结点的两个子结点编号(均不超过 n),建立一棵二叉树(根结点的编号为 1),如果是叶子结点&…...
)
从XTR文件看GNSS数据质量:如何利用Anubis报告优化你的测量方案(以GPS/BDS/Galileo为例)
从XTR文件解码GNSS数据质量:实战分析与优化策略 在GNSS测量领域,数据质量直接决定了最终定位结果的可靠性。XTR文件作为Anubis软件生成的质量报告,包含了大量反映GNSS观测质量的指标参数。对于有经验的工程师而言,这些数字不仅仅是…...

Kubernetes自动化更新利器Keel:实现容器镜像的持续部署
1. 项目概述:为什么我们需要一个“自动化的应用更新管家”? 如果你和我一样,负责维护着几个、十几个,甚至几十个运行在Kubernetes或Docker环境中的应用,那你一定对“更新”这件事又爱又恨。爱的是,新版本意…...

I2C地址冲突全解析:从原理到实战的嵌入式系统设计指南
1. I2C地址:嵌入式系统设计的“门牌号”与“交通规则”如果你玩过单片机或者树莓派,肯定对I2C不陌生。两根线,SDA和SCL,就能挂上一堆传感器、显示屏、扩展芯片,听起来简直是嵌入式开发的“万金油”。但真正上手后&…...

ViewTurbo:基于响应式依赖追踪的前端渲染优化方案
1. 项目概述与核心价值最近在折腾一个挺有意思的开源项目,叫 ViewTurbo。这名字听起来就带点“涡轮增压”的劲儿,事实上,它也确实是一个旨在为视图渲染“加速”的工具。简单来说,ViewTurbo 的核心目标,是解决在复杂前端…...

基于Python/Flask的洗车店业务管理系统设计与实现
1. 项目概述:从“洗车”到“洗车服务”的数字化重构最近在GitHub上看到一个挺有意思的项目,叫“washing-cars”。光看名字,你可能会觉得这只是一个关于洗车的小工具或者记录表。但当我深入进去,才发现它远不止于此。这个项目本质上…...

AI对话记忆管理实战:memory-organizer库解决长上下文难题
1. 项目概述:一个为AI记忆体“瘦身”与“归档”的利器最近在折腾一些本地大语言模型(LLM)的应用,比如搭建个人知识库助手或者长期对话机器人,一个绕不开的痛点就是“记忆”的管理。模型本身没有持久记忆,每…...

SuperMap Objects开发避坑指南:从COM引用到内存释放的实战经验总结
SuperMap Objects开发避坑指南:从COM引用到内存释放的实战经验总结 在GIS二次开发领域,SuperMap Objects以其强大的空间数据处理能力备受开发者青睐。然而,当我们将这个COM组件集成到C# WinForms项目中时,往往会遇到一些官方文档…...

每日大赛间歇期通过Taotoken模型广场探索新模型特性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 每日大赛间歇期通过Taotoken模型广场探索新模型特性 对于每日参与各类AI应用开发或创意大赛的选手而言,比赛间歇期并非…...

别再傻傻分不清了!Numpy里ndarray和array到底啥区别?新手避坑指南
别再傻傻分不清了!Numpy里ndarray和array到底啥区别?新手避坑指南 刚接触Numpy的Python开发者,几乎都会在ndarray和array()这两个概念上栽跟头。明明看起来都能创建数组,为什么文档里一会儿用np.array(),一会儿又冒出个…...

tchMaterial-parser:基于智能解析引擎的教育资源去中心化获取方案
tchMaterial-parser:基于智能解析引擎的教育资源去中心化获取方案 【免费下载链接】tchMaterial-parser 国家中小学智慧教育平台 电子课本下载工具,帮助您从智慧教育平台中获取电子课本的 PDF 文件网址并进行下载,让您更方便地获取课本内容。…...