启智CV机器人,ROS,ubuntu 20.04 【最后一步有问题】
资料:
https://wiki.ros.org/kinetic/Installation/Ubuntu
https://blog.csdn.net/qq_44339029/article/details/120579608
装VM。
装ubuntu20.04 desktop.iso系统。
装vm工具:
sudo apt update
sudo dpkg --configure -a
sudo apt-get autoremove open-vm-tools
sudo apt-get install open-vm-tools -y
sudo apt-get install open-vm-tools-desktop -y重启虚拟机。
断网修复:
sudo rmmod e1000
sudo rmmod e1000e
sudo rmmod igbsudo modprobe e1000
sudo modprobe e1000e
sudo modprobe igbsudo dhclient ens33sudo apt-get update && sudo apt-get upgrade
sudo apt-get purge network-manager
sudo apt-get install network-manager进root:
sudo -iapt install vim -y
增加ros软件源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'更换秘钥:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
更新软件源:
sudo apt update
安装ros:
sudo apt install ros-noetic-desktop-full -y
完成后是这样:
sudo apt install python3-rosdep2
vim /etc/hosts
通过IPAddress.com首页,输入raw.githubusercontent.com查询到最新的真实IP地址
185.199.108.133 raw.githubusercontent.comrosdep init
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcsource ~/.bashrc安装rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool -y可以看到:
验证ROS是否安装成功
sudo apt install python3-roslaunch
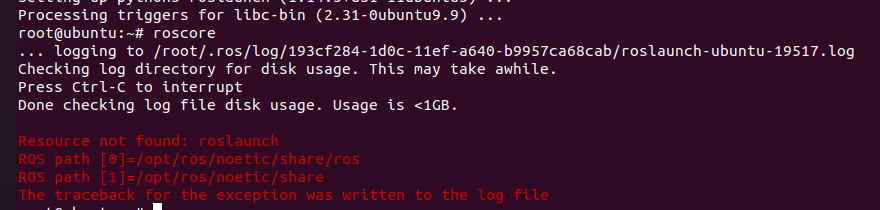
sudo apt install ros-noetic-desktop-fullroscore正常会出现:
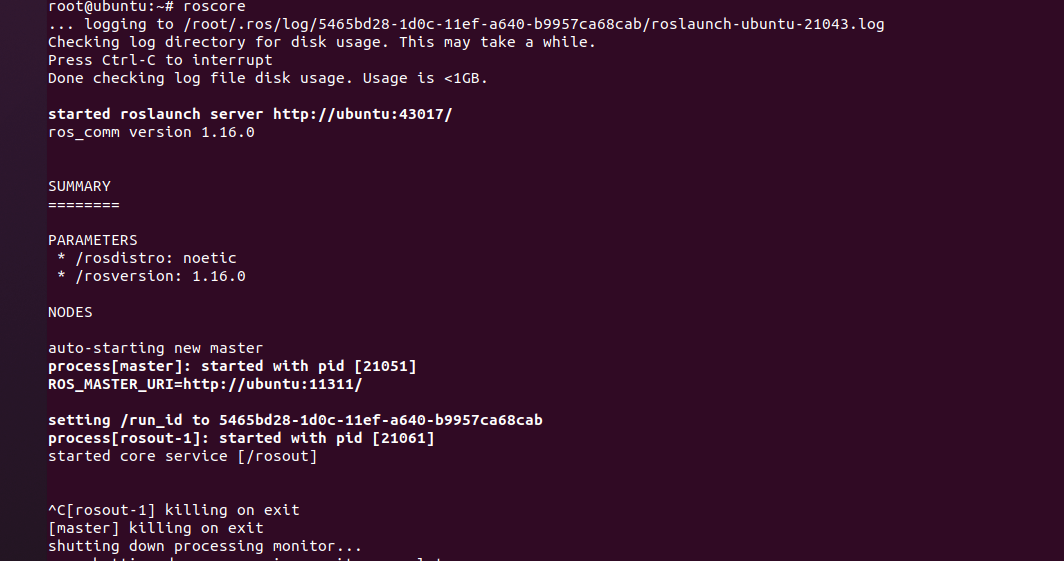
这样就是不正常:
做实验:
cd ~
sudo apt install python3-catkin-tools python3-osrf-pycommon
source /opt/ros/noetic/setup.bash
mkdir -p /root/catkin_ws/srccd /root/catkin_ws/src # 很重要!
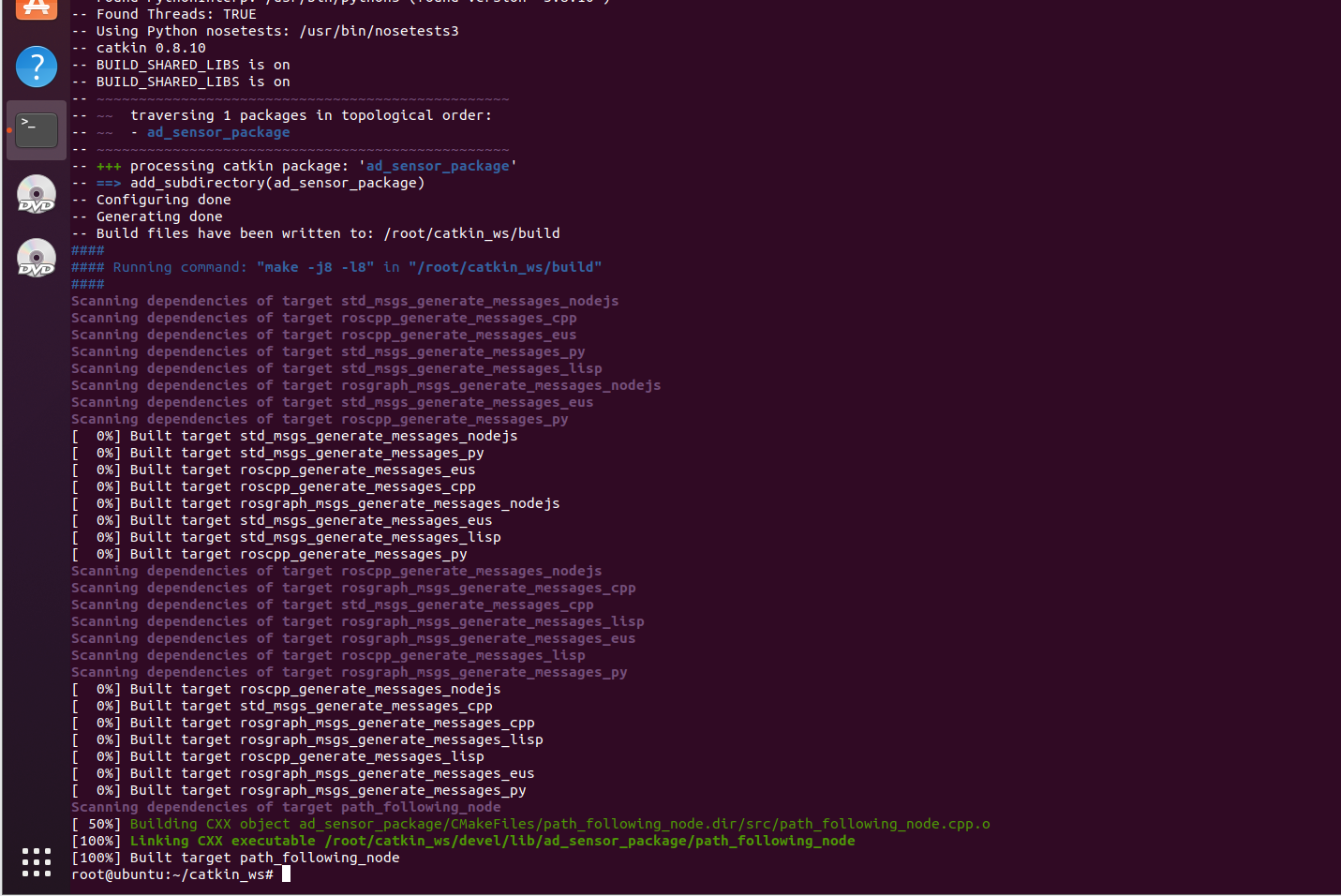
catkin_create_pkg ad_sensor_package roscpp std_msgscd /root/catkin_ws
catkin_make一定要注意我的执行顺序,最后一句catkin_make构建工作空间后是这样:
获取源码:
cd ~/catkin_ws/src/
git clone https://github.com/6-robot/wpb_cv.git
git clone https://github.com/orbbec/ros_astra_camera.git
# git clone https://github.com/orbbec/ros_astra_launch.git # 要权限!!??
git clone https://github.com/tfoote/ros_astra_launch.git
git clone https://github.com/ros-drivers/rgbd_launch.git
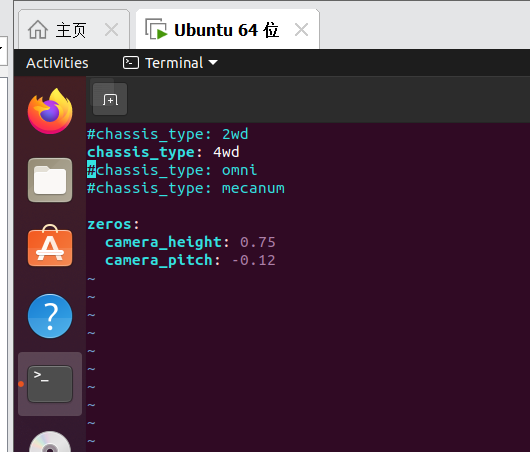
修改settings.yam:
cd /root/catkin_ws/src/wpb_cv/wpb_cv_bringup/config
再次构建:
apt install python3-rosdep2 --fix-missing
sudo apt install ros-noetic-rostest
sudo apt-get install ros-noetic-tfsudo apt-get install ros-noetic-joy -y
sudo apt-get install ros-noetic-hector-mapping -y
sudo apt-get install ros-noetic-gmapping -y
sudo apt-get install ros-noetic-navigation -y
sudo apt-get install ros-noetic-sound-play -y
sudo apt-get install ros-noetic-astra-camera -y
sudo apt-get install ros-noetic-astra-launch -y
sudo apt-get install ros-noetic-depthimage-to-laserscan -y
sudo apt-get install ros-noetic-libuvc -ycd /root/catkin_ws
catkin_make
启动节点:
roslaunch wpb_cv_bringup minimal.launch
相关文章:
启智CV机器人,ROS,ubuntu 20.04 【最后一步有问题】
资料: https://wiki.ros.org/kinetic/Installation/Ubuntu https://blog.csdn.net/qq_44339029/article/details/120579608 装VM。 装ubuntu20.04 desktop.iso系统。 装vm工具: sudo apt update sudo dpkg --configure -a sudo apt-get autoremove o…...

React-生成随机数和日期格式化
生成随机数 uuid文档:https://github.com/uuidjs/uuid npm install uuid import {v4 as uuidV4} from uuid 使用: uuidV4() 日期格式化 dayjs文档:安装 | Day.js中文网 npm install dayjs import dayjs from dayjs...
11Linux学习笔记
Linux 实操篇 目录 文章目录 Linux 实操篇1.rtm包(软件)1.1 基本命令1.2 基本格式1.3安装rtm包1.4卸载rtm包 2.apt包2.1 基本命令结构2.2 常用选项2.3常用命令 1.rtm包(软件) 1.1 基本命令 1.2 基本格式 1.3安装rtm包 1.4卸载r…...
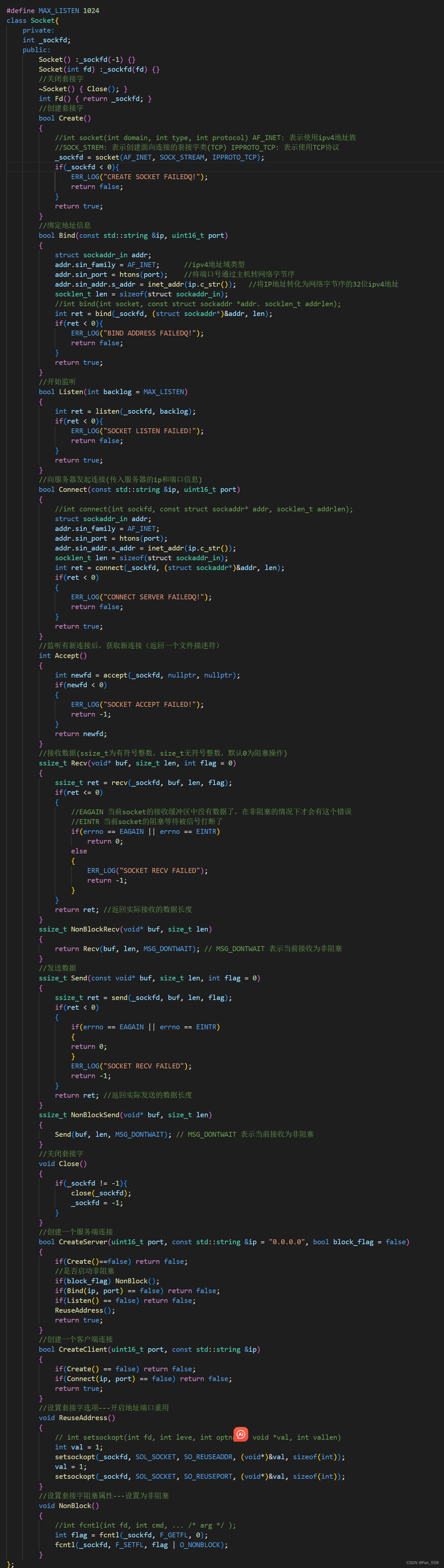
004 仿muduo实现高性能服务器组件_Buffer模块与Socket模块的实现
🌈个人主页:Fan_558 🔥 系列专栏:仿muduo 🌹关注我💪🏻带你学更多知识 文章目录 前言Buffer模块Socket模块 小结 前言 这章将会向你介绍仿muduo高性能服务器组件的buffer模块与socket模块的实…...
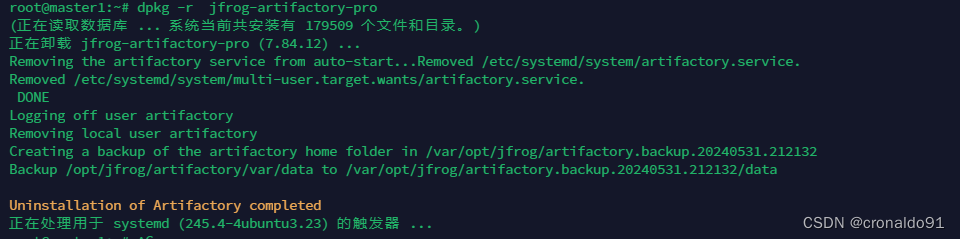
研发效能DevOps: Ubuntu 部署 JFrog 制品库
目录 一、实验 1.环境 2.Ubuntu 部署 JFrog 制品库 3.Ubuntu 部署 postgresql数据库 4.Ubuntu 部署 Xray 5. 使用JFrog 增删项目 二、问题 1.Ubuntu 如何通过apt方式部署 JFrog 制品库 2.Ubuntu 如何通过docker方式部署 JFrog 制品库 3.安装jdk报错 4.安装JFrog Ar…...

hadoop学习笔记
hadoop集群搭建 hadoop摘要 Hadoop 是一个开源的分布式存储和计算框架,旨在处理大规模数据集并提供高可靠性、高性能的数据处理能力。它主要包括以下几个核心组件: Hadoop 分布式文件系统(HDFS):HDFS 是 Hadoop 的分布…...

使用dockerfile快速构建一个带ssh的docker镜像
不多说先给代码 FROM ubuntu:22.04 # 基础镜像 可替换为其他镜像 USER root RUN echo root:root |chpasswd RUN apt-get update -y \&& apt-get install -y git wget curl RUN apt-get install -y openssh-server vim && apt clean \&& rm -rf /tmp/…...
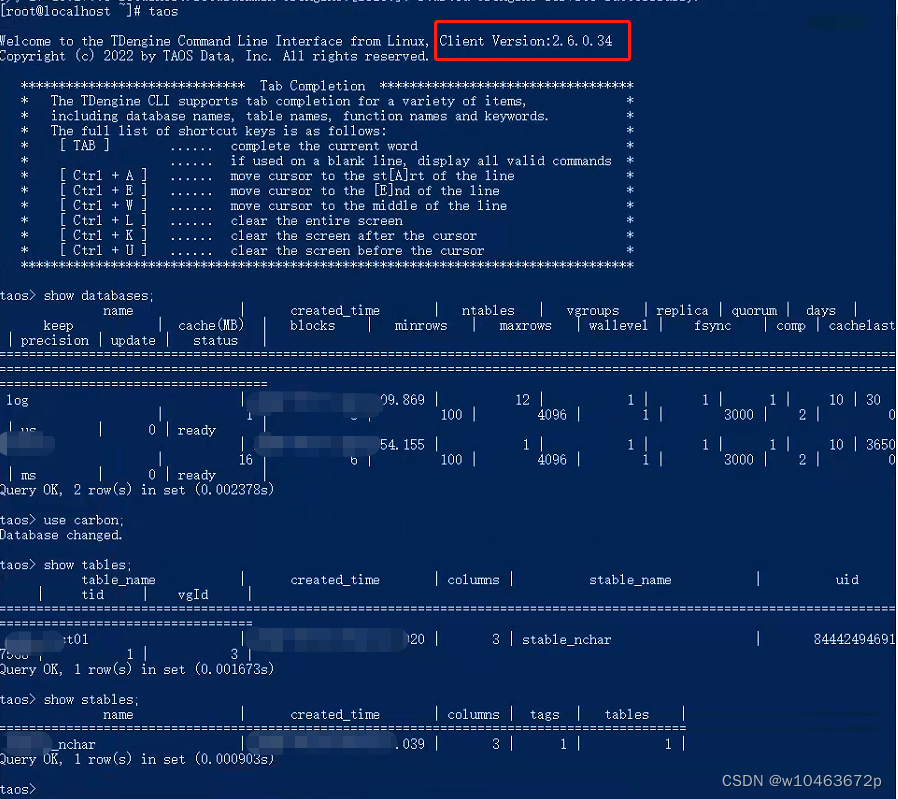
linux部署运维1——centos7.9离线安装部署涛思taos2.6时序数据库TDengine
在实际项目开发过程中,并非一直都使用关系型数据库,对于工业互联网类型的项目来说,时序型数据库也是很重要的一种,因此掌握时序数据库的安装配置也是必要的技能,不过对于有关系型数据库使用的开发工作者来说࿰…...

Linux shell编程学习笔记51: cat /proc/cpuinfo:查看CPU详细信息
0 前言 2024年的网络安全检查又开始了,对于使用基于Linux的国产电脑,我们可以编写一个脚本来收集系统的有关信息。对于中央处理器CPU比如,我们可以使用cat /proc/cpuinfo命令来收集中央处理器CPU的信息。 1. /proc/cpuinfo 保存了系统的cpu…...

Ps:调整画笔工具
调整画笔工具 Adjustment Brush Tool可以将选区、创建蒙版和应用调整的传统工作流程合并为一个步骤,简化了对图像进行非破坏性局部调整的操作。 快捷键:B 调整画笔工具是 Photoshop 2024 年 5 月版(25.9 版)新增的工具。 ◆ ◆ …...
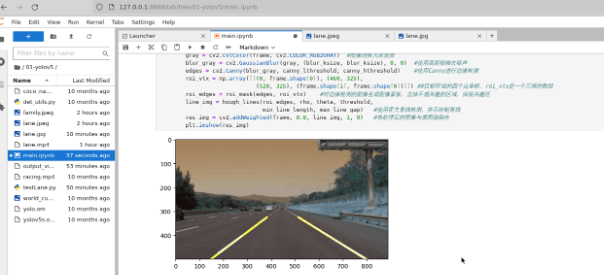
香橙派 AIpro上手体验并验证车道线识别算法
香橙派 AIpro上手体验并验证车道线识别算法 1.前言 最近入手了一块香橙派AIpro,体验了一下,感觉还不错,在这里分享给大家,大家可以做个参考。 2.开箱 整套产品包含一块主板、一个电源插头和一条双端Type-C的数据线,…...

为啥装了erlang,还报错erl: command not found?
转载说明:如果您喜欢这篇文章并打算转载它,请私信作者取得授权。感谢您喜爱本文,请文明转载,谢谢。 问题背景: 在一台不通外网的服务器上装rabbitmq,然后在启动的时候,遇到了报错 “/usr/lib/…...
容器技术基础理论与常用命令:必知必会,效率翻倍!
如何利用容器技术提升你的工作效率?掌握基础理论和常用命令是必不可少的,本文将为你全面介绍容器技术,并教你必知必会的技能,让你工作、学习效率翻倍,对于网络安全工作者也是必不可少的技能! 0. 引言 学习…...

ChatGPT Edu版本来啦:支持GPT-4o、自定义GPT、数据分析等
5月31日,OpenAI在官网宣布,推出ChatGPT Edu版本。 据悉,这是一个专门为大学校园提供的ChatGTP,支持GPT-4o、网络搜索、自定义GPT、数据分析、代码生成等功能,可以极大提升学生、老师的学习质量和教学效率。 目前&…...

Spark RDD案例
Apache Spark中的RDD(Resilient Distributed Dataset)是一个不可变、分布式对象集合,它允许用户在大型集群上执行并行操作。虽然RDD在Spark的早期版本中非常核心,但随着DataFrame和Dataset的引入,RDD的使用在某些场景下…...

【线性表 - 数组和矩阵】
数组是一种连续存储线性结构,元素类型相同,大小相等,数组是多维的,通过使用整型索引值来访问他们的元素,数组尺寸不能改变。 知识点数组与矩阵相关题目 # 知识点 数组的优点: 存取速度快 数组的缺点: 事先必须知道…...

Springboot 开发 -- 跨域问题技术详解
一、跨域的概念 跨域访问问题指的是在客户端浏览器中,由于安全策略的限制,不允许从一个源(域名、协议、端口)直接访问另一个源的资源。当浏览器发起一个跨域请求时,会被浏览器拦截,并阻止数据的传输。 这…...
)
【Qt】之【项目】整理可参考学习的git项目链接(持续更新)
Tcp 通信相关 IM即时通讯设计 高并发聊天服务:服务器 qt客户端(附源码) - DeRoy - 博客园 未使用protobuf通讯协议格式 github:GitHub - ADeRoy/chat_room: IM即时通讯设计 高并发聊天服务:服务器 qt客户端 QT编…...

2024年5月个人工作生活总结
本文为 2024年5月工作生活总结。 研发编码 golang 多个defer函数执行顺序 golang 函数中如有多个defer,倒序执行。示例代码: func foo() {defer func() {fmt.Println("111")}()defer func() {fmt.Println("2222")}()defer func()…...
Kafka Java API
1、增加依赖 <dependency><groupId>org.apache.kafka</groupId><artifactId>kafka-clients</artifactId><version>1.0.0</version> </dependency>2、三个案例 案例1:生产数据 import org.apache.kafka.clients.p…...

Windows热键冲突终极排查指南:5分钟快速定位占用进程
Windows热键冲突终极排查指南:5分钟快速定位占用进程 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你是否曾经…...

Microsoft Defender for Cloud AI工作负载安全:防范越狱攻击的终极方案
Microsoft Defender for Cloud AI工作负载安全:防范越狱攻击的终极方案 【免费下载链接】Microsoft-Defender-for-Cloud Welcome to the Microsoft Defender for Cloud community repository 项目地址: https://gitcode.com/gh_mirrors/mi/Microsoft-Defender-for…...

零基础新手会议记录,选购避坑指南 可直接上手
日常工作学习中,不少人会遇到会议纪要整理、访谈录音处理、讲座笔记记录的难题,手动整理耗时费力还易出错。本文评测了市面上主流录音转写工具,整理了新手避坑指南和实用选择建议,零基础也能快速上手。综合实测后,听脑…...

5分钟搞定Windows包管理器:winget-install终极配置指南
5分钟搞定Windows包管理器:winget-install终极配置指南 【免费下载链接】winget-install Install WinGet using PowerShell! Prerequisites automatically installed. Works on Windows 10/11 and Server 2019/2022. 项目地址: https://gitcode.com/gh_mirrors/wi…...

对抗测试框架:用字节码增强与混沌工程提升系统韧性
1. 项目概述:一个对抗测试的“剧院”最近在开源社区里,我注意到一个名字挺有意思的项目,叫nanami7777777/anti-test-theater。乍一看,这个标题有点让人摸不着头脑——“反测试剧院”?测试和剧院能扯上什么关系…...

技术干货!!DeepSeek API 实战:从零到生产级的 Python 调用指南 — 流式、Function Calling、多轮对话、成本优化全覆盖
DeepSeek V3 的 API 性价比在 2026 年依然没有对手——同等能力价格只有 GPT-5.5 的 1/5。但翻了一圈中文技术社区,发现大多数「教程」只讲到第一段 chat.completions.create 就停了。生产环境真正需要的东西——流式输出怎么接、Function Calling 踩了什么坑、高并…...

如何通过虚拟地址查找物理地址
1 如何通过虚拟地址查找物理地址(原理与代码) 本文说明 虚拟地址(VA)到物理地址(PA) 的映射在 x86-64 Linux 上如何理解与实现,并给出可编译的示例代码。不同架构(ARM、RISC-V&#…...

Perplexity最新v2.4文档重大更新预警:3个已删除接口、2个强制迁移路径、1个即将下线的Auth Flow——错过今晚将无法兼容生产环境
更多请点击: https://intelliparadigm.com 第一章:Perplexity最新v2.4文档重大更新预警总览 Perplexity v2.4 文档体系迎来结构性升级,核心聚焦于开发者体验一致性、API 响应语义增强及本地化支持扩展。本次更新不再仅限于补丁式修订&#x…...

基于RK3568J核心板的隔离网闸设计:硬件选型、系统架构与工程实践
1. 项目概述:当嵌入式核心板遇上网络安全“守门员”最近几年,“科技与狠活”这个词火遍全网,让大家对各种产品的成分和安全性都多了一份审视。其实,除了我们吃进嘴里的东西,另一个看不见摸不着却至关重要的领域——网络…...

AI智能体与Excalidraw集成:实现自然语言绘图与图形解析
1. 项目概述:当白板工具遇上AI智能体 最近在折腾AI智能体(Agent)开发时,发现一个很有意思的项目: Agents365-ai/excalidraw-skill 。乍一看,这像是一个给Excalidraw(一款开源的虚拟白板绘图工…...