Realsense的一些事情
Realsense的一些事情
librealsense的安装
官网教程:
- apt 安装教程:
https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md
- 自行clone并编译教程:
https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md
RealsenseROS的安装
- apt 安装:
sudo apt-get install ros-noetic-realsense2-camera
-
装在哪里了?
/opt/ros/noetic/share/realsense2_camera/launch -
修改分辨率和FPS:
rs_rgbd.launch -
安装ros的rgbd
sudo apt install ros-noetic-rgbd-launch -
启动测试:
roslaunch realsense2_camera rs_rgbd.launch
- 自行编译安装
# 建立workspace mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src/ catkin_init_workspace cd .. catkin_make echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc source ~/.bashrc# 在catkin_ws/src/下载源程序 cd src git clone https://github.com/IntelRealSense/realsense-ros.git git clone https://github.com/pal-robotics/ddynamic_reconfigure.git# catkin_make编译 cd ~/catkin_ws && catkin_make# 测试 roslaunch realsense2_camera demo_pointcloud.launch# 其他测试 ## 查看发布的topic rostopic list## 查看相机内参 # 方法一 rostopic echo /camera/color/camera_info rostopic echo /camera/aligned_depth_to_color/camera_info 注:aligned_depth_to_color是指已经将深度信息通过相机到RGBD的外参映射到彩色图像上 # 方法二 rs-sensor-control
安装完成后流程
使用 RealSense 相机在 ROS(Robot Operating System)中获取图像数据通常需要使用 RealSense ROS 包。以下是使用 RealSense D400 系列相机在 ROS 中获取图像数据的基本步骤:
-
安装 RealSense ROS 包
首先,确保已经安装了 RealSense ROS 包。你可以通过源码或二进制方式安装。以下是二进制安装的步骤:
sudo apt-get install ros-${ROS_DISTRO}-realsense2-camera其中
${ROS_DISTRO}是你正在使用的 ROS 版本名称,比如melodic或noetic。 -
启动 RealSense 相机节点
在终端中运行以下命令来启动 RealSense 相机节点:
roslaunch realsense2_camera rs_camera.launch这将启动相机节点并发布相机的图像数据和其他传感器数据到 ROS 中。
-
订阅图像数据
一旦相机节点启动并发布了图像话题,你可以通过订阅相应的话题来获取图像数据。
例如,如果你想订阅 RGB 图像,你可以使用以下命令:
rostopic echo /camera/color/image_raw如果你想订阅深度图像,你可以使用以下命令:
rostopic echo /camera/depth/image_rect_raw请根据需要订阅相应的话题来获取图像数据。
-
使用图像数据
一旦你已经订阅了相应的图像话题,你可以编写 ROS 节点来处理图像数据。例如,使用 Python 或 C++ 编写节点来接收图像数据并进行处理、分析或显示。
在 Python 中,你可以使用
rospy或cv_bridge等库来订阅图像话题并处理图像数据。这些是基本步骤,你可以根据需要在 ROS 中使用 RealSense 相机进行更复杂的图像处理或传感器数据的集成。
realsense使用文档
reansense官方使用文档教程:
https://dev.intelrealsense.com/docs/docs-get-started
相关文章:

Realsense的一些事情
Realsense的一些事情 librealsense的安装 官网教程: apt 安装教程: https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md自行clone并编译教程: https://github.com/IntelRealSense/librealsense/blo…...

CISCN 2023 初赛 被加密的生产流量
题目附件给了 modbus.pcap 存在多个协议 但是这道题多半是 考 modbus 会发现 每次的 Query 末尾的两个字符 存在规律 猜测是base家族 可以尝试提取流量中的数据 其中Word Count字段中的22871 是10进制转16进制在转ascii字符串 先提取 过滤器判断字段 tshark -r modbus.pcap …...

初识C语言第三十天——设计三子棋游戏
目录 一.设计游戏框架 1.打印游戏菜单 2.输入选择判断(玩游戏/游戏结束/输入错误重新输入) 二、玩游戏过程设计 1.设计棋格存放棋子——二维数组 2.初始化棋盘——初始化为空格 3.打印棋盘——本质上就是打印数组 4.游戏过程——1.玩家走棋 2.…...

ehcache3多级缓存应用
项目中如果有使用大量的本地缓存场景,可以使用redisehcache组合缓存,优先使用ehcache本地缓存,本地缓存没有查询到再使用redis缓存 可看前文中如何集成 本地缓存使用存在的问题 1、本地缓存如何保证缓存的是最新值 可定义版本号、自增id或者…...
C# WinForm —— 24 Threading.Timer 组件介绍与使用
1. 简介 System.Threading.Timer 多线程 轻量级 精度高 提供以指定的时间间隔对线程池线程执行方法的机制 和System.Timers.Timer 类似,每隔一段时间触发事件,执行操作(不是由UI线程执行的),即使事件中执行了比较耗时的操作,也…...

03-07Java自动化之JAVA基础之循环
JAVA基础之循环 一、for循环 1.1for循环的含义 for(初始化语句;条件判断;条件控制或–){ //代码语句 } 1、首先执行初始话语句,给变量一个起始的值 2、条件判断进行判断,为true,执行循环体中的代码语句 …...

【人工智能Ⅱ】实验8:生成对抗网络
实验8:生成对抗网络 一:实验目的 1:理解生成对抗网络的基本原理。 2:学会构建改进的生成对抗网络,如DCGAN、WGAN、WGAN-GP等。 3:学习在更为真实的数据集上应用生成对抗网络的方法。 二:实验…...
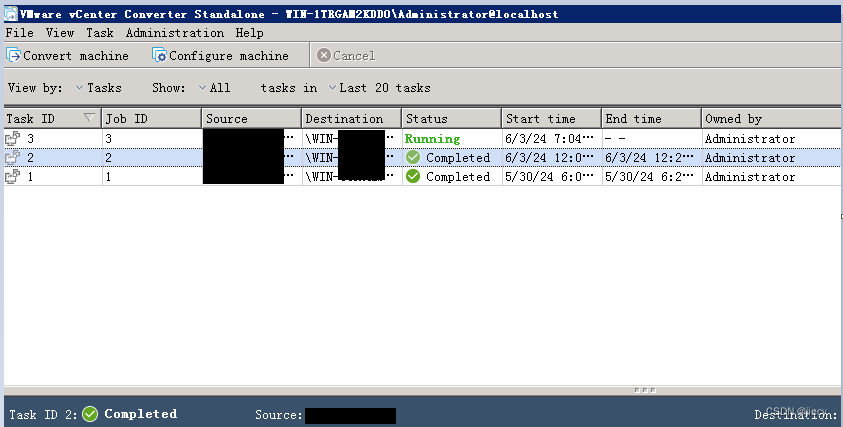
vmware将物理机|虚拟机转化为vmware虚机
有时,我们需要从不同的云平台迁移虚拟机、上下云、或者需要将不再受支持的老旧的物理服务器转化为虚拟机,这时,我们可以用一款虚拟机转化工具:vmware vcenter converter standalone,我用的是6.6的版本,当然…...

redis 高可用及哨兵模式 @by_TWJ
目录 1. 高可用2. redis 哨兵模式3. 图文的方式让我们读懂这几个算法3.1. Raft算法 - 图文3.2. Paxos算法 - 图文3.3. 区别: 1. 高可用 在 Redis 中,实现 高可用 的技术主要包括 持久化、复制、哨兵 和 集群,下面简单说明它们的作用…...

封装tab栏,tab切换可刷新页面
dom结构 <template><div class"container"><!-- tab栏 --><div class"border-b"><tabs:tabsList"tabsList":selectTabsIndex"selectTabsIndex"tabsEven"tabsEven"></tabs></div>…...

JavaScript第八讲:日期,Math,自定义对象
目录 前言 日期 1. 创建日期对象 2. 年/月/日 3. 时:分:秒:毫秒 4. 一周的第几天 5. 经历的毫秒数 6. 修改日期和时间 Math 1. 自然对数和圆周率 2. 绝对值 3. 最小最大 4. 求幂 5. 四舍五入 6. 随机数 自定义对象 1. 通过 new Object 创建对象 2. 通过 funct…...

php质量工具系列之phploc
phploc是一个快速测量PHP项目大小的工具 结果支持raw csv xml json格式,可输出文件或者打印到控制台 安装 PHAR方式 wget https://phar.phpunit.de/phploc.pharphp phploc.phar -vComposer方式(推荐) composer global require --dev phploc/phplocphploc -v使用 …...
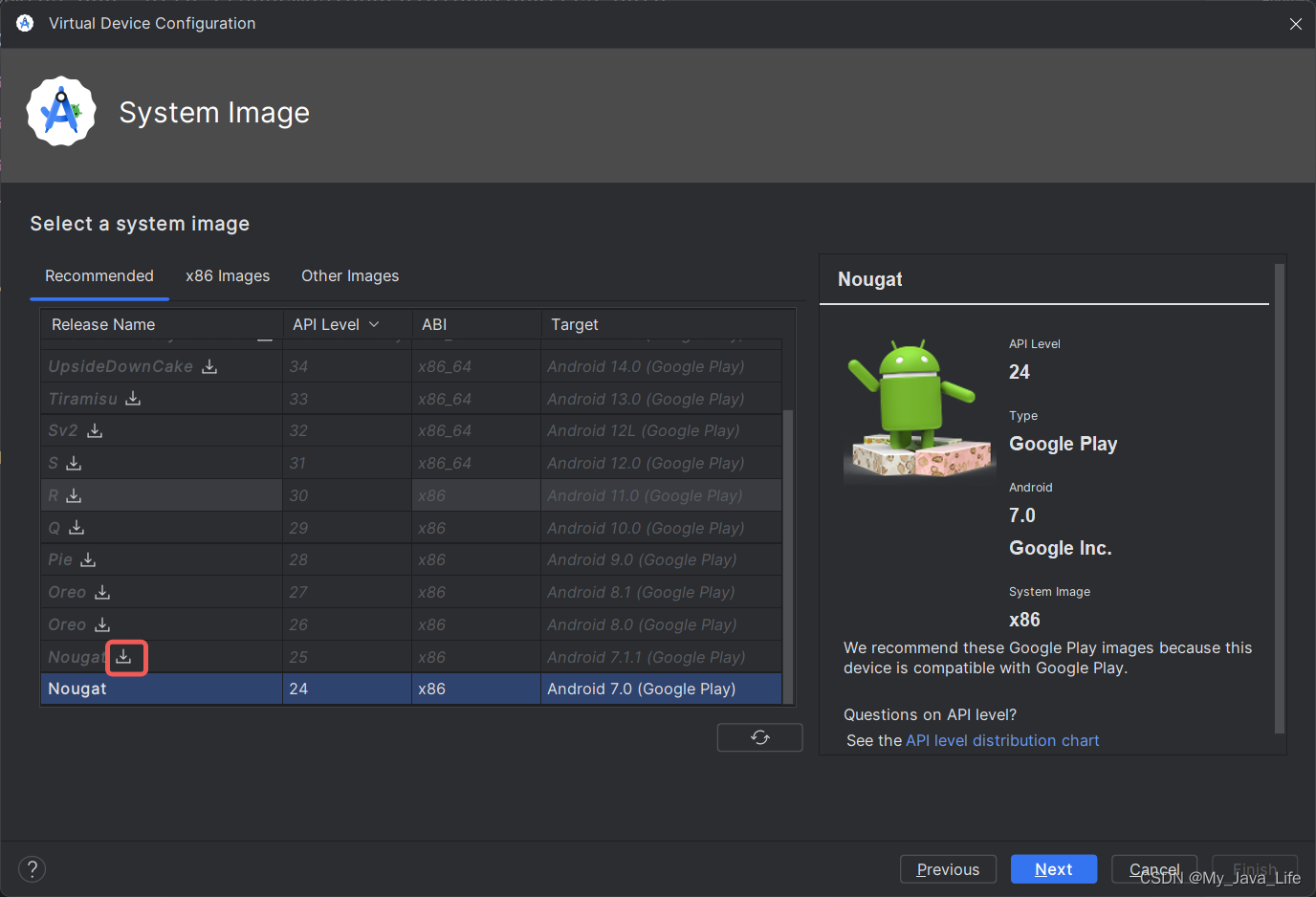
创建模拟器
修改模拟器默认路径 由于模拟器文件比较大,默认路径在C:\Users\用户名.android\avd,可修改默认路径 创建修改后的路径文件 D:\A-software\Android\AVD添加系统变量ANDROID_SDK_HOME:D:\A-software\Android\AVD重启Android Studio 创建模拟…...
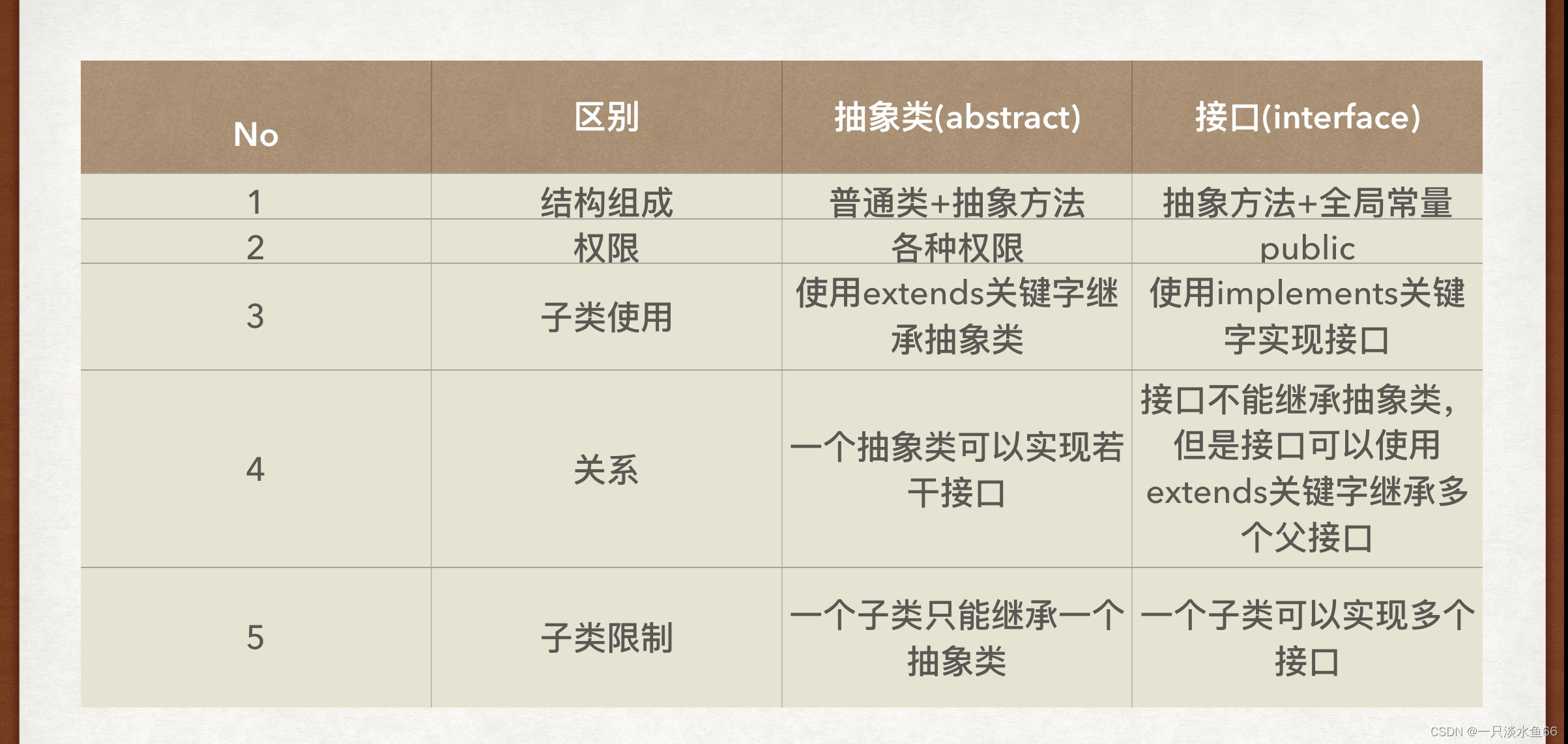
【Java】接口详解
接口是抽象类的更进一步. 抽象类中还可以包含非抽象方法, 和字段. 而接口中包含的方法都是抽象方法, 字段只能包含静态常量。 一个简单的接口代码示例 interface IShape { void draw(); } class Cycle implements IShape { Override public void draw() { System.out.println…...
去掉el-table表头右侧类名是gutter,width=17px的空白区域(包括表头样式及表格奇偶行样式和表格自动滚动)
代码如下: <el-table:data"tableData"ref"scroll_Table":header-cell-style"getRowClass":cell-style"styleBack"height"350px"style"width: 100%"><el-table-column prop"id" l…...

3079. 求出加密整数的和
给你一个整数数组 nums ,数组中的元素都是 正 整数。定义一个加密函数 encrypt ,encrypt(x) 将一个整数 x 中 每一个 数位都用 x 中的 最大 数位替换。比方说 encrypt(523) 555 且 encrypt(213) 333 。 请你返回数组中所有元素加密后的 和 。 示例 1&…...

奶茶店、女装店、餐饮店是高危创业方向,原因如下:
关注卢松松,会经常给你分享一些我的经验和观点。 现在的俊男靓女们,心中都有一个执念: (1)想证明自己了,开个奶茶去…… (2)想多赚点钱了,加盟餐饮店去…… (3)工作不顺心了,搞个女装店去…… 但凡抱着…...
)
嵌入式笔试面试刷题(day16)
文章目录 前言一、PWM波形的占空比计算公式是什么?二、ADC和DAC在嵌入式系统中的应用场景有哪些?三、watchdog定时器的作用及其在系统中的使用是什么?四、JTAG接口在嵌入式开发中的作用是什么?五、实时操作系统(RTOS)的任务调度策…...
【MyBatis】MyBatis操作数据库(二):动态SQL、#{}与${}的区别
目录 一、 动态SQL1.1 \<if>标签1.2 \<trim>标签1.3 \<where>标签1.4 \<set>标签1.5 \<foreach>标签1.6 \<include>标签 二、 #{}与${}的区别2.1 #{}是预编译sql,${}是即时sql2.2 SQL注入2.3 #{}性能高于${}2.4 ${}用于排序功能…...
[Zer0pts2020]easy strcmp 分析与加法
查壳 Ubuntu上的64位程序 第一步应该尝试运行一下 啥也不是 (这里我改了程序,原来应该是a1>1) 但是我动调发现a1值是1 我就改了判断 但是还是没什么用 也找不到a2的引用 找一下有没有什么improt调用 发现还是啥也不是 思路这里断了 刚好这个程序几个代码而已 函数看…...

深度解析抖音直播回放下载架构设计:从FLV流捕获到多线程存储优化
深度解析抖音直播回放下载架构设计:从FLV流捕获到多线程存储优化 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fall…...

内连接,左连接,右连接怎么区别开来?
区分这三种连接其实非常简单,核心就在于看**“谁的数据必须全部保留,谁的数据没有匹配就要被过滤掉”**。 为了让你彻底搞懂,我们可以把 user 表(用户)和 orders 表(订单)想象成两个班级&#x…...

别再死记硬背POC了!深入理解Struts2漏洞家族史与OGNL表达式攻防演进
从OGNL表达式到漏洞家族史:Struts2安全攻防演进全景剖析 在Java Web安全领域,Struts2框架的漏洞史堪称一部活教材。许多安全工程师能够熟练使用工具复现S2-045、S2-057等著名漏洞,却对漏洞背后的技术原理和演进逻辑一知半解。这种知其然而不知…...

Axure RP 9汉化后,这些高效原型设计技巧让你事半功倍
Axure RP 9汉化后高效原型设计实战指南 当你终于完成Axure RP 9的安装与汉化,面对熟悉的中文界面,是否感到一丝茫然?从"能用"到"善用"这个强大的原型设计工具,中间隔着一道效率的鸿沟。本文将带你跨越这道鸿沟…...

CMSIS-DSP库更新指南与性能优化实践
1. CMSIS-DSP库更新需求解析在嵌入式开发领域,CMSIS-DSP库是ARM Cortex-M处理器上信号处理的核心支撑。作为专为微控制器优化的数字信号处理库,它包含了滤波器、矩阵运算、FFT等常用算法,其性能直接影响实时信号处理系统的表现。随着编译器版…...
)
计算机视觉毕设避坑指南:从开题到答辩,我踩过的雷和总结的实用工具包(含数据集/模型/部署)
计算机视觉毕设避坑指南:从开题到答辩的实战经验与工具包 第一次接触计算机视觉毕业设计时,我被那些炫酷的论文标题和复杂的模型结构吓得不轻。直到自己真正走完全程,才发现毕设更像是一场马拉松,而不是百米冲刺——重要的不是起步…...

UniApp视频模块深度配置:云打包与Android离线打包的差异详解与选型建议
UniApp视频模块深度配置:云打包与Android离线打包的差异详解与选型建议 在移动应用开发领域,视频功能已成为提升用户体验的关键要素。UniApp作为跨平台开发框架,其VideoPlayer模块的集成方式直接影响着开发效率和最终产品质量。面对云打包与离…...

LEO卫星自愈网络:动态抗干扰与信号合并算法实践
1. 项目概述:LEO卫星自愈网络的设计挑战与创新方案在近地轨道(LEO)卫星通信领域,我们正面临着一个关键的技术矛盾:一方面,LEO卫星凭借其低延迟特性成为下一代全球通信网络的核心组成部分;另一方…...

终极指南:如何用OpenPilot为您的爱车升级智能驾驶系统
终极指南:如何用OpenPilot为您的爱车升级智能驾驶系统 【免费下载链接】openpilot openpilot is an operating system for robotics. Currently, it upgrades the driver assistance system on 300 supported cars. 项目地址: https://gitcode.com/GitHub_Trendin…...

航空航班延误预测:可解释性模型与四源融合实战
1. 项目概述:这不是一个“预测准不准”的问题,而是一个“预测有没有用”的问题我做航班延误预测项目,不是为了在Kaggle排行榜上刷个0.89的AUC就收工。真正让我在凌晨三点改完第17版特征工程脚本、盯着滚动的日志等模型收敛的,是去…...