ROS2从入门到精通4-3:全局路径规划插件开发案例(以A*算法为例)
目录
- 0 专栏介绍
- 1 路径规划插件的意义
- 2 全局规划插件编写模板
- 2.1 构造规划插件类
- 2.2 注册并导出插件
- 2.3 编译与使用插件
- 3 全局规划插件开发案例(A*算法)
- 常见问题
0 专栏介绍
本专栏旨在通过对ROS2的系统学习,掌握ROS2底层基本分布式原理,并具有机器人建模和应用ROS2进行实际项目的开发和调试的工程能力。
🚀详情:《ROS2从入门到精通》
1 路径规划插件的意义
在ROS2中,路径规划插件为导航系统提供灵活性和可扩展性。路径规划插件允许用户根据特定的需求和环境条件选择不同的路径规划算法和策略。这些插件可以被动态加载和替换,从而使机器人可以根据实际情况灵活地调整路径规划行为。这种灵活性使得机器人能够适应不同类型的任务,包括室内导航、室外移动和复杂的障碍物避开等。同时也促进了路径规划算法的研究和开发,为导航系统的不断改进提供了可能。

2 全局规划插件编写模板
本节以最简单的直线路径规划插件为例介绍ROS2中插件编码的基本范式
2.1 构造规划插件类
所有全局规划插件的基类是nav2_core::GlobalPlanner,该基类提供了5个纯虚方法来实现规划器插件,一个合法的路径规划插件必须覆盖这5个基本方法:
configure():在规划器服务器进入on_configure状态时会调用此方法,此方法执行ROS2参数声明和规划器成员变量的初始化;activate():在规划器服务器进入on_activate状态时会调用此方法,此方法实现规划器进入活动状态前的必要操作;deactivate():在规划器服务器进入on_deactivate状态时会调用此方法,此方法实现规划器进入非活动状态前的必要操作;cleanup():在规划器服务器进入on_cleanup状态时会调用此方法,此方法清理为规划器创建的各种资源;createPlan():在规划器服务器要求指定开始位姿和目标位姿的全局规划时会调用此方法。此方法输入开始和目标位姿,并会返回携带全局规划路径的nav_msgs::msg::Path
在本例中,直线规划器的createPlan()函数体很简单,就是增量地生成从起点到终点的直线
nav_msgs::msg::Path StraightLine::createPlan(const geometry_msgs::msg::PoseStamped & start,const geometry_msgs::msg::PoseStamped & goal)
{nav_msgs::msg::Path global_path;global_path.poses.clear();global_path.header.stamp = node_->now();global_path.header.frame_id = global_frame_;// calculating the number of loops for current value of interpolation_resolution_int total_number_of_loop = std::hypot(goal.pose.position.x - start.pose.position.x,goal.pose.position.y - start.pose.position.y) /interpolation_resolution_;double x_increment = (goal.pose.position.x - start.pose.position.x) / total_number_of_loop;double y_increment = (goal.pose.position.y - start.pose.position.y) / total_number_of_loop;for (int i = 0; i < total_number_of_loop; ++i) {geometry_msgs::msg::PoseStamped pose;pose.pose.position.x = start.pose.position.x + x_increment * i;pose.pose.position.y = start.pose.position.y + y_increment * i;pose.pose.position.z = 0.0;pose.pose.orientation.x = 0.0;pose.pose.orientation.y = 0.0;pose.pose.orientation.z = 0.0;pose.pose.orientation.w = 1.0;pose.header.stamp = node_->now();pose.header.frame_id = global_frame_;global_path.poses.push_back(pose);}geometry_msgs::msg::PoseStamped goal_pose = goal;goal_pose.header.stamp = node_->now();goal_pose.header.frame_id = global_frame_;global_path.poses.push_back(goal_pose);return global_path;
}
2.2 注册并导出插件
在创建了自定义规划器的前提下,需要导出该规划器插件以便规划器服务器可以在运行时正确地加载。在ROS2中,插件的导出和加载由pluginlib处理。
-
源文件配置导出宏
#include "pluginlib/class_list_macros.hpp" PLUGINLIB_EXPORT_CLASS(straightline_planner::StraightLinePlanner, nav2_core::GlobalPlanner) -
配置插件描述文件
xxx_planner_plugin.xml,例如本案例为straightline_planner_plugin.xml文件。此XML文件包含以下信息:library path:插件库名称及其位置;class name:规划算法类的名称;class type:规划算法类的类型;base class:规划基类的名称,统一为nav2_core::GlobalPlannerdescription:插件的描述。
实例如下
<library path="straightline_planner_plugin"><class name="straightline_planner/StraightLine" type="straightline_planner::StraightLine" base_class_type="nav2_core::GlobalPlanner"><description>This is an example of straight path generator.</description></class> </library> -
配置
CMakeLists.txt文件
使用cmake函数pluginlib_export_plugin_description_file()来导出插件。这个函数会将插件描述文件安装到install/share目录中,并设置ament索引以使其可被发现,实例如下pluginlib_export_plugin_description_file(nav2_core straightline_planner_plugin.xml) -
配置
package.xml描述文件,实例如下:<export><build_type>ament_cmake</build_type><nav2_core plugin="${prefix}/straightline_planner_plugin.xml" /> </export>
2.3 编译与使用插件
编译该插件软件包,接着通过配置文件使用插件。
参数的传递链如下:首先在simulation.launch.py中引用配置文件navigation.yaml
declare_params_file_cmd = DeclareLaunchArgument('params_file',default_value=os.path.join(simulation_dir, 'config', 'navigation.yaml'),description='Full path to the ROS2 parameters file to use for all launched nodes')
接着在navigation.yaml中修改插件配置,默认如下,是用的是NavfnPlanner插件:
planner_server:ros__parameters:expected_planner_frequency: 20.0use_sim_time: Trueplanner_plugins: ["GridBased"]GridBased:plugin: "nav2_navfn_planner/NavfnPlanner"tolerance: 0.5use_astar: falseallow_unknown: true
将上述替换为自己的插件,本案例为:
planner_server:ros__parameters:expected_planner_frequency: 20.0use_sim_time: Trueplanner_plugins: ["GridBased"]GridBased:plugin: "straightline_planner/StraightLinePlanner"interpolation_resolution: 0.1
接着运行路径规划即可看到规划算法被替换

3 全局规划插件开发案例(A*算法)
接下来正式开始实用型路径规划算法的开发案例,以A*算法为例,核心规划部分如下所示:
ool AStar::plan(const unsigned char* global_costmap, const Node& start, const Node& goal, std::vector<Node>& path,std::vector<Node>& expand)
{// clear vectorpath.clear();expand.clear();// open list and closed liststd::priority_queue<Node, std::vector<Node>, Node::compare_cost> open_list;std::unordered_map<int, Node> closed_list;open_list.push(start);// get all possible motionsconst std::vector<Node> motions = Node::getMotion();// main processwhile (!open_list.empty()){// pop current node from open listNode current = open_list.top();open_list.pop();// current node does not exist in closed listif (closed_list.find(current.id_) != closed_list.end())continue;closed_list.insert(std::make_pair(current.id_, current));expand.push_back(current);// goal foundif (current == goal){path = _convertClosedListToPath(closed_list, start, goal);return true;}// explore neighbor of current nodefor (const auto& motion : motions){// explore a new nodeNode node_new = current + motion;node_new.id_ = grid2Index(node_new.x_, node_new.y_);// node_new in closed listif (closed_list.find(node_new.id_) != closed_list.end())continue;node_new.pid_ = current.id_;// next node hit the boundary or obstacle// prevent planning failed when the current within inflationif ((node_new.id_ < 0) || (node_new.id_ >= ns_) ||(global_costmap[node_new.id_] >= lethal_cost_ * 0.8 &&global_costmap[node_new.id_] >= global_costmap[current.id_]))continue;// if using dijkstra implementation, do not consider heuristics costif (!is_dijkstra_)node_new.h_ = helper::dist(node_new, goal);// if using GBFS implementation, only consider heuristics costif (is_gbfs_)node_new.g_ = 0.0;// else, g will be calculate through node_new = current + mopen_list.push(node_new);}}return false;
}
按照第二节的步骤导出并启动规划即可,效果如下

常见问题
-
/opt/ros/noetic/lib/move_base/move_base: symbol lookup error: /home/winter/ROS/ros_learning_tutorials/Lecture19/devel/lib//libmy_planner.so: undefined symbol: _ZN18base_local_planner12CostmapModelC1ERKN10costmap_2d9Costmap2DE解决方案:未定义符号错误
undefined symbol一般是依赖配置错误导致,采用c++filt工具解析符号c++filt _ZN18base_local_planner12CostmapModelC1ERKN10costmap_2d9Costmap2DE base_local_planner::CostmapModel::CostmapModel(costmap_2d::Costmap2D const&)可以看出是
base_local_planner的问题,需要在功能包CMakeLists.txt中配置base_local_planner的相关依赖。c++filt是什么?g++编译器有名字修饰机制,其目的是给同名的重载函数不同的、唯一的签名识别,所有函数在编译后的文件中都会生成唯一的符号,c++filt可以逆向解析符号,还原函数,定位代码。
完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …
相关文章:
ROS2从入门到精通4-3:全局路径规划插件开发案例(以A*算法为例)
目录 0 专栏介绍1 路径规划插件的意义2 全局规划插件编写模板2.1 构造规划插件类2.2 注册并导出插件2.3 编译与使用插件 3 全局规划插件开发案例(A*算法)常见问题 0 专栏介绍 本专栏旨在通过对ROS2的系统学习,掌握ROS2底层基本分布式原理,并具有机器人建…...
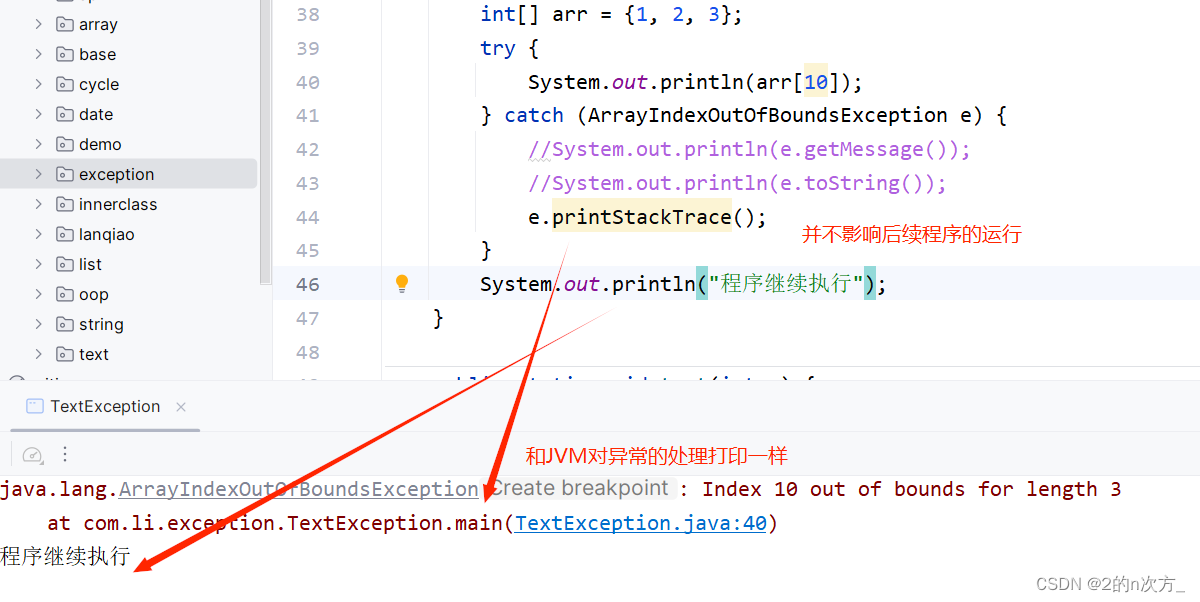
Java学习【认识异常】
Java学习【认识异常】 认识异常异常的种类异常的作用 异常的处理方式JVM默认的处理方式捕获异常finally 多个异常的处理异常中的方法抛出异常 自定义异常 认识异常 在Java中,将程序执行过程中发生的不正常行为称为异常 异常的种类 Error代表的是系统级别的错误&a…...

uniapp+h5 ——微信小程序页面截屏保存在手机
web-view 需要用到 web-view ,类似于iframe, 将网页嵌套到微信小程序中,参数传递等; 示例(无法实时传递数据),页面销毁时才能拿到h5传递的数据,只能利用这点点击跳转到小程序另一个…...
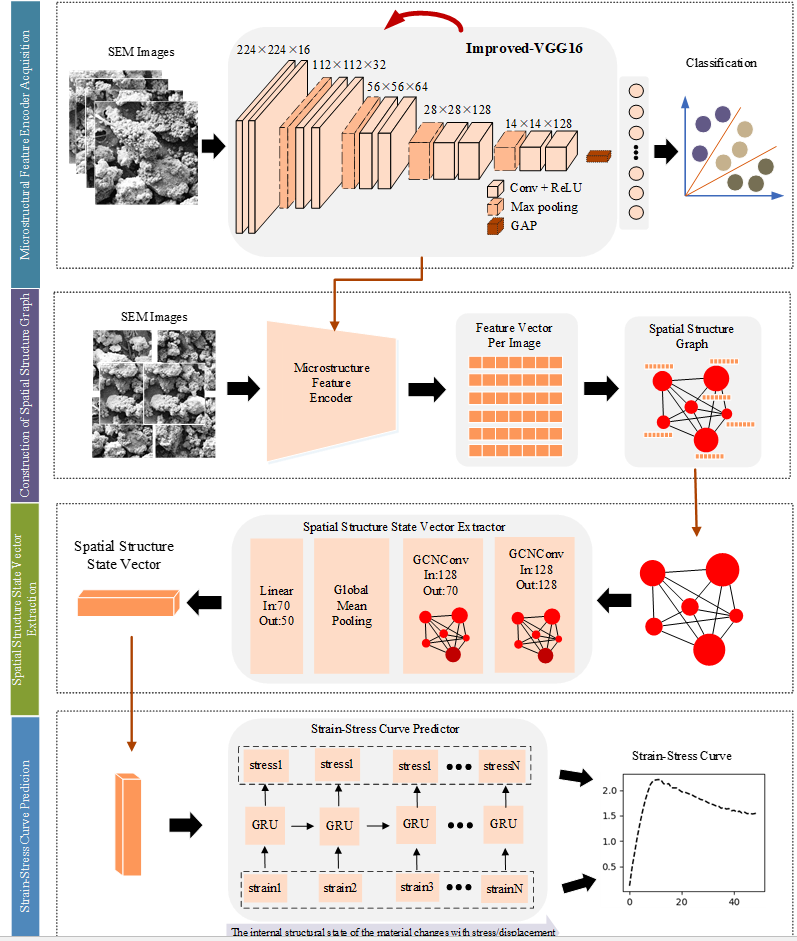
三、基于图像分类预训练编码及图神经网络的预测模型 【框图+源码】
背景: 抽时间补充,先挖个坑。 一、模型结构 二、源码...
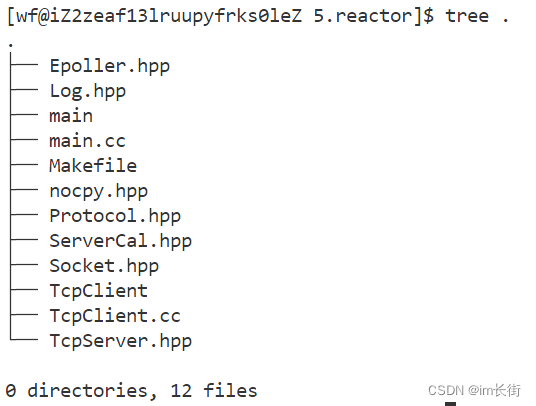
Linux - 高级IO
目录 理解五种IO模型非阻塞IO的设置多路转接之select 实现一个简易的select服务器select服务器的优缺点 多路转接之poll 实现一个简易的poll服务器poll服务器的优缺点 多路转接之epoll epoll原理epoll的优势用epoll实现一个简易的echo服务器 epoll的LT和ET工作模式 什么是LT和…...

面试题:说一下 http 报文都有哪些东西?
面试题:说一下 http 报文都有哪些东西? HTTP 是传输超文本(实际上除了 HTML,可以传输任何类型的文件,如视频、音频、文本等)的协议,是一组用于浏览器-服务器之间数据传输的规则。 HTTP 位于 OS…...
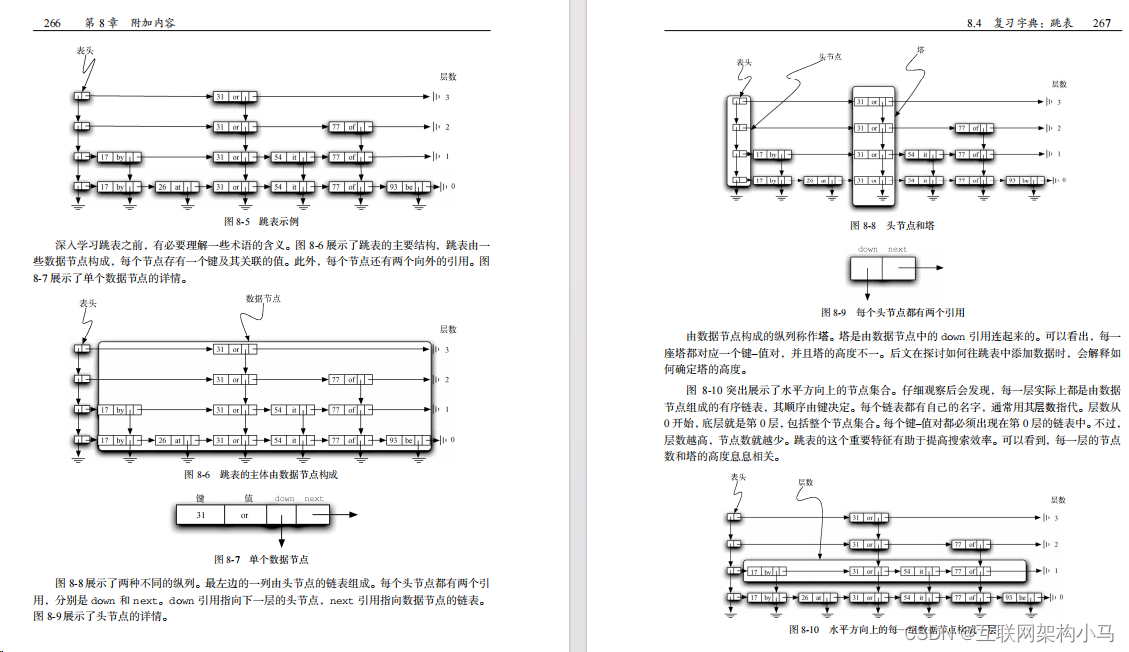
开山之作!Python数据与算法分析手册,登顶GitHub!
若把编写代码比作行军打仗,那么要想称霸沙场,不能仅靠手中的利刃,还需深谙兵法。 Python是一把利刃,数据结构与算法则是兵法。只有熟读兵法,才能使利刃所向披靡。只有洞彻数据结构与算法,才能真正精通Pyth…...

编译安装gcc-11及可能遇到的bug
编译安装脚本 GCC_VERSION11.1.0 PACKAGE_DIR/path/to/gcc/source/code GCC_DIR$PACKAGE_DIR/gcc-$GCC_VERSION GCC_INSTALL_DIR/path/to/install/gccmkdir -p $GCC_INSTALL_DIR cd $GCC_INSTALL_DIR rm -rf * cd $PACKAGE_DIR rm -rf gcc-$GCC_VERSION if [ ! -f "gcc-$…...

vue项目引入json/js文件批量或单个方法
vue项目 json // 方式一 : 将文件内容完整的引入 import json from ./src/assets/xxx.json console.log(json) console.log(---)// 方式二 : 部分引入-名称必须是文件中定义的key import {name1,name2} from ./src/assets/xxx.json console.log(name1)…...
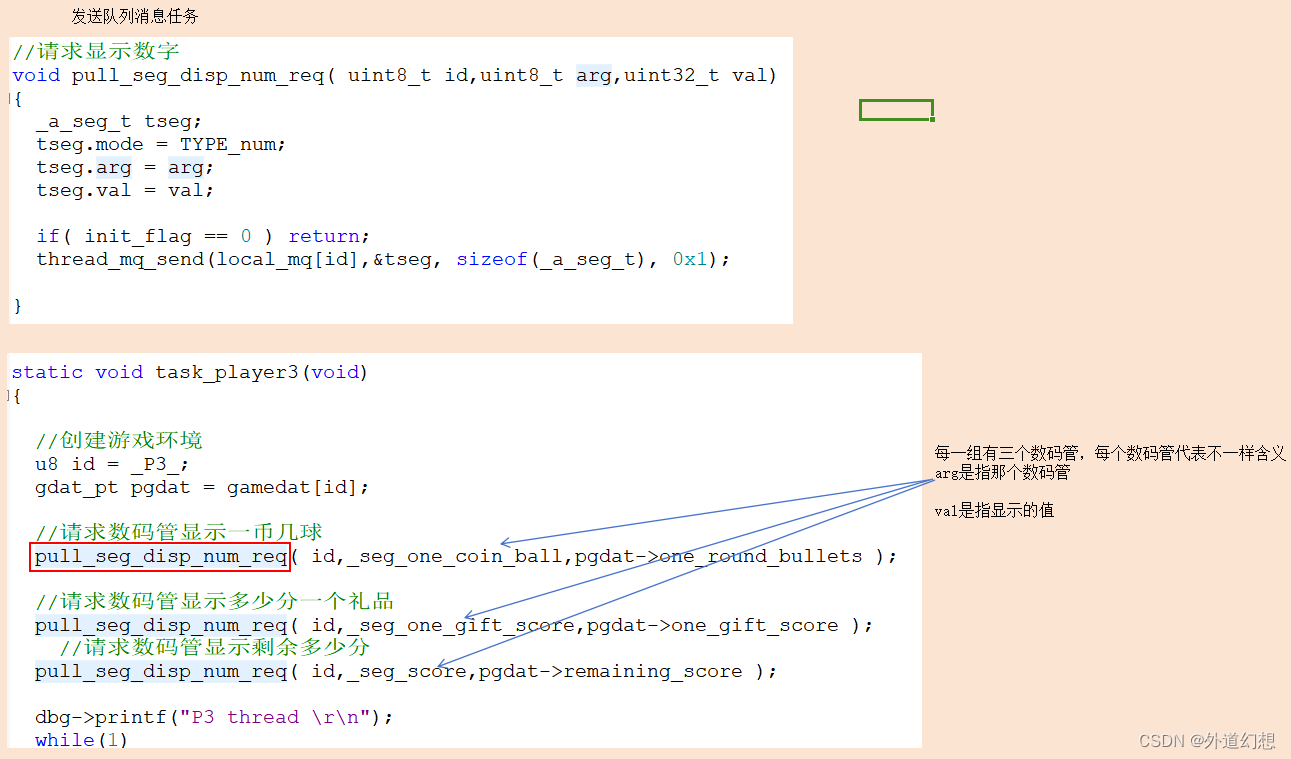
守护任务用来防止资源冲突
背景:有三个任务,他们都需要操作数码管。每个任务对应三个数码管,共9个数码管。硬件上9个数码管的控制使用一套硬件完成。 策略:每个任务都往自己的队列里面发数据,单独建立一个监听任务:处理所有队列的数…...

fast admin实现多数据库导入数据
思路 1创建多数据库连接 2后端的前台代码能使用get或者post请求传递选中数据给后台 3后台能够接收到 4后台接收到id或者全字段数据后对数据进行处理,然后使用多数据库操作将其存入第二个数据库 实现 1config文件下创建新数据库连接 db_config2 > [// 数据库类…...
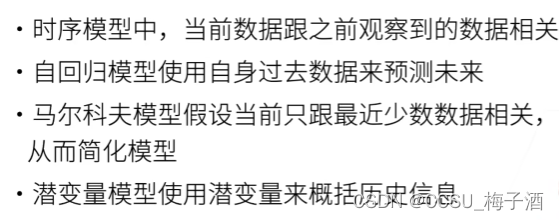
NLP基础——序列模型(动手学深度学习)
序列模型 定义 序列模型是自然语言处理(NLP)和机器学习领域中一类重要的模型,它们特别适合处理具有时间顺序或序列结构的数据,例如文本、语音信号或时间序列数据。 举个例子:一部电影的评分在不同时间段的评分可能是…...

机器学习AI大模型的开源与闭源:哪个更好?
文章目录 前言一、开源AI模型1.1 开源的优点1.2 开源的缺点 二、闭源AI模型2.1 闭源的优点2.2 闭源的缺点 三、开源与闭源的平衡3.1 开源与闭源结合的案例3.2 开源与闭源的战略选择 小结 前言 在过去的几年里,人工智能(AI)和机器学习…...
关于大模型多轮问答的两种方式
前言 大模型的多轮问答难点就是在于如何精确识别用户最新的提问的真实意图,而在常见的使用大模型进行多轮对话方式中,我接触到的只有两种方式: 一种是简单地直接使用 user 和 assistant 两个角色将一问一答的会话内容喂给大模型,…...
达梦数据库相关SQL及适配Mysql配置总结
🍓 简介:java系列技术分享(👉持续更新中…🔥) 🍓 初衷:一起学习、一起进步、坚持不懈 🍓 如果文章内容有误与您的想法不一致,欢迎大家在评论区指正🙏 🍓 希望这篇文章对你有所帮助,欢…...

Centos7.9实现多台机器ssh免密登录
1.本机(172.16.10.228)先生成密钥对 ssh-keygen -t rsa 2.执行命令,把本机公钥拷贝到远程机器 ssh-copy-id rootdistinctIp 3.查看一下远程机器 、/root/.ssh/authorized_keys文件 cat /root/.ssh/authorized_keys 会看到里边多了个公钥…...

Unity3D DOTS JobSystem物理引擎的使用详解
前言 Unity3D DOTS(Data-Oriented Technology Stack)是Unity引擎的一项新技术,旨在提高游戏性能和扩展性。其中的Job System是一种用于并行处理任务的系统,可以有效地利用多核处理器的性能。在本文中,我们将重点介绍如…...

vue3+element-plus 表单校验和循环form表单校验
1.HTML页面 //el-form 标签添加上 ref"form2Form" :rules"rules2" :model"form2" 正常表单校验 //没有循环表单的使用事例<el-form-item label"投保人名称" class"insurance-date-no1" prop"tbrName">…...
Java集合基础知识点系统性总结篇
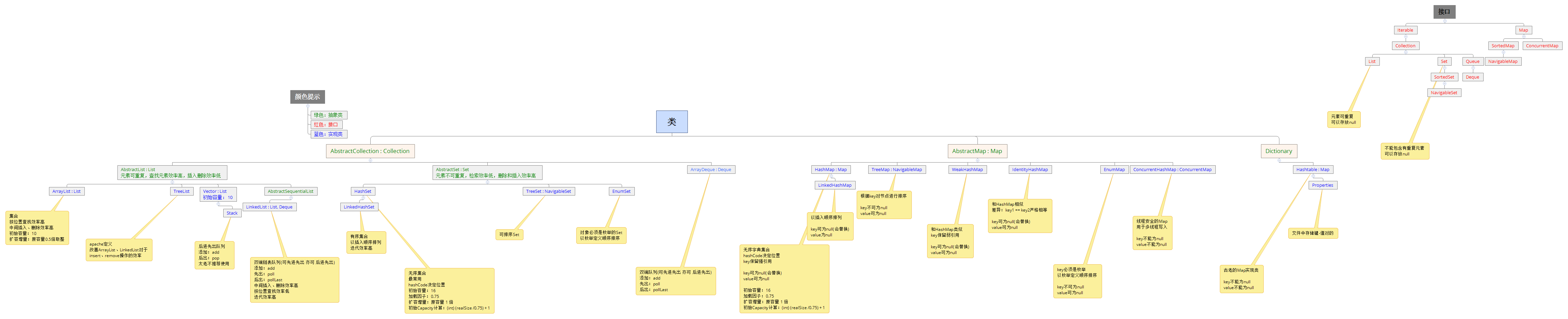
目录 集合一、图解集合的继承体系?([图片来源](https://www.cnblogs.com/mrhgw/p/9728065.html))点击查看大图二、List,Set,Map三者的区别?三、List接口的实现3.1、Arraylist 、 LinkedList、Vector3.2、Arraylist 、 LinkedList、…...

智能网联汽车信息安全风险识别与应对策略研究综述
摘要:随着智能网联汽车技术的飞速发展,其信息安全问题逐渐成为公众关注的焦点。本文概述了智能网联汽车技术的发展背景和信息安全风险的来源,采用STRIDE威胁分析方法对智能网联汽车的四层模型进行风险识别,进一步探讨了抗女巫攻击…...

Rplidar 报错 RESULT_OPERATION_TIMEOUT 排查指南:从波特率到硬件自检的完整流程
1. 遇到RESULT_OPERATION_TIMEOUT报错时的心态调整 第一次看到Rplidar弹出"Error, operation time out. RESULT_OPERATION_TIMEOUT!"的时候,我也是一头雾水。这种报错就像突然断电的电脑——你不知道是电源线松了还是主板烧了。但根据我处理过上百次这类问…...

MiniCPM-o-4.5-nvidia-FlagOS企业级方案:高可用服务器集群部署指南
MiniCPM-o-4.5-nvidia-FlagOS企业级方案:高可用服务器集群部署指南 1. 引言:当AI应用走向规模化 想象一下这个场景:你的团队基于MiniCPM-o-4.5-nvidia-FlagOS开发了一款智能客服应用,上线初期反响不错。但随着用户量激增&#x…...

别再写“超级循环“了!裸机系统跑得快的秘密,全在架构上
裸机开发这件事,门槛低,天花板高。随便写个while(1)主循环,里面堆上一堆if判断,程序确实能跑起来。但跑起来和跑得好,完全是两码事。很多工程师写了三五年裸机代码,项目越来越大,代码越来越乱&a…...

使用CSDN博客记录FRCRN部署全过程:技术分享与经验沉淀
使用CSDN博客记录FRCRN部署全过程:技术分享与经验沉淀 今天想和大家聊聊一个特别有意思的实践方式:一边在星图GPU平台上部署FRCRN这个语音降噪模型,一边把整个过程写成一篇CSDN技术博客。这听起来是不是有点“左右互搏”?但相信我…...

Qwen3-Reranker-0.6B部署实战:从零开始到成功调用
Qwen3-Reranker-0.6B部署实战:从零开始到成功调用 1. 认识Qwen3-Reranker-0.6B 1.1 模型核心能力 Qwen3-Reranker-0.6B是Qwen家族最新推出的文本重排序模型,专为提升文本检索质量而设计。这个0.6B参数的模型虽然体积适中,但在多语言文本排…...

节能模式!OpenClaw优化Qwen3-4B模型夜间任务功耗
节能模式!OpenClaw优化Qwen3-4B模型夜间任务功耗 1. 为什么需要关注OpenClaw的能耗问题 去年夏天,我的MacBook Pro在运行OpenClaw执行夜间数据整理任务时,风扇狂转的声音把我从睡梦中吵醒。摸到发烫的机身时,我突然意识到——这…...

YOLOv8n-face人脸检测架构:6MB模型实现92%精度与25ms延迟的企业级方案
YOLOv8n-face人脸检测架构:6MB模型实现92%精度与25ms延迟的企业级方案 【免费下载链接】yolov8-face yolov8 face detection with landmark 项目地址: https://gitcode.com/gh_mirrors/yo/yolov8-face YOLOv8n-face是基于YOLOv8架构优化的轻量级人脸检测模型…...
)
别再折腾了!Windows 10/11 下用 Anaconda 一键搞定 OpenPose Python 环境(附 CUDA 11.8 配置)
告别环境配置噩梦:Anaconda三分钟部署OpenPose全攻略 当你在深夜第三次重装CUDA驱动时,是否怀疑过人生?作为计算机视觉领域的里程碑式工具,OpenPose的人体姿态识别能力令人惊叹,但其复杂的环境配置却让无数开发者折戟沉…...

如何改cad文件版本?盘点三个实用方法
在日常 CAD 绘图工作中,经常会遇到高版本 CAD 文件在低版本软件中无法打开、显示异常的问题。本文为大家整理了3 种实用的 CAD 版本转换方法,包含工具批量转换与两种代码实现方式,满足不同场景下的版本转换需求。方法一:汇帮 CAD …...

深度学习模型的解释性与可解释AI:从原理到实践
深度学习模型的解释性与可解释AI:从原理到实践 1. 背景介绍 深度学习模型在各种任务中取得了优异的性能,但它们通常被视为"黑盒",缺乏可解释性。随着AI应用在关键领域的普及,模型的可解释性变得越来越重要。本文将深入…...