基于大模型的智慧零售教育科研平台——技术方案
一、概述
1.1背景
随着数字经济的快速发展和全社会数字化水平的升级,人工智能的积极作用越来越凸显,人工智能与各个行业的深度融合已成为促进传统产业转型升级的重要方式之一。ChatGPT的出现掀起了又一波人工智能发展热潮,人工智能行业发展势头强劲,市场规模持续上升,正逐步进入效率化生产阶段,为用户带来了更加个性化的服务和产品。
近年来,中国人工智能行业受到各级政府的高度重视和国家产业政策的重点支持,国家陆续出台了多项政策,鼓励人工智能行业发展与创新,《关于支持建设新一代人工智能示范应用场景的通知》《关于加快场景创新以人工智能高水平应用促进经济高质量发展的指导意见》《新型数据中心发展三年行动计划(2021-2023年)》等产业政策为我国人工智能产业发展提供了长期保障。而人工智能结合机器人,成为产业发展风向标,使机器人具有“智慧”,服务日常生活,成为机器人产业发展的流行趋势。
2023年1月《“机器人+”应用行动实施方案》指出,当前,机器人产业蓬勃发展,正极大改变着人类生产和生活方式,为经济社会发展注入强劲动能。预计到2025年,制造业机器人密度较2020年实现翻番,服务机器人、特种机器人行业应用深度和广度显著提升,机器人促进经济社会高质量发展的能力明显增强。
在智慧零售领域,大模型技术具有数据处理能力强、预测准确度高、智能化水平高等显著优势。通过构建庞大的数据集和复杂的算法模型,大模型能够实现对市场趋势的准确预测以及商品库存的智能管理,同时能够根据消费者的购物历史和偏好,提供定制化的购物体验,从而提高销售额和顾客满意度。
1.2简介
以大模型技术与机器人技术在“智慧零售”这一垂直领域应用的实际需求为应用背景,模拟在无人零售店等新型零售模式场景中,大模型通过分析消费者行为数据,提供个性化的商品推荐;通过图生文技术和自然语言处理技术,提高交互效率和便捷性;通过智能机械臂完成对商品的识别、定位与抓取,通过图像识别技术实现商品识别和结算,提高购物体验,最终实现协助零售商户智能识别客户需求。功能如下:
- 智慧视觉辨识:利用大模型的强大计算能力和视觉识别技术,系统能够实现对货架上商品的高精度识别,确保每一个商品都能被精确地辨识和分类。
- 环境感知物体跟踪:结合大模型与深度学习算法,本功能可实时检测并追踪货架上商品的位置和状态,为智能物流和库存管理提供实时数据。
- 互动式语音交互:通过大模型集成的自然语言处理能力,平台可通过自然且友好的语音交互与用户沟通,提供即时信息反馈和导购服务。
- 洞察消费者辅助决策:利用大模型根据顾客行为、面部表情分析,生成消费者洞察报告,帮助零售商理解顾客需求,优化商品组合。
- 智能精准操控:以大模型技术为支撑,智能机械臂能够自动精准地识别目标商品,并完成复杂的抓取与搬运任务,展现了先进的自动化操作能力。
- 智能化结算分析:此功能集结大模型的数据分析和图像识别技术,能够在短时间内完成对结算区商品的自动识别和计价,提供一站式智能结算解决方案。
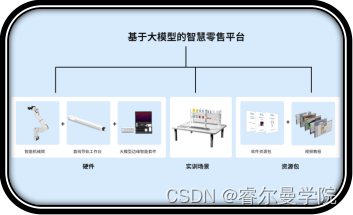
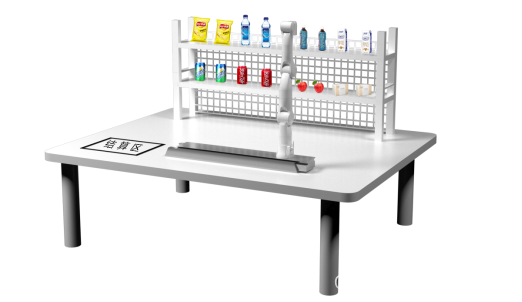
图1 .基于大模型的智慧零售教育科研平台
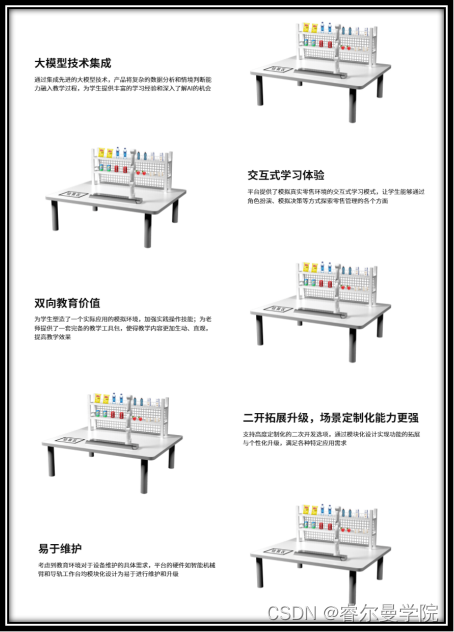
1.3特点
1.3.1
基于大模型的智慧零售教育科研平台集主控与执行机构与一体,主控中采用目前主流的大模型与图文生成技术,通过自然语言处理,实现对外部环境的感知与分析;执行机构使用超轻量仿人机械臂,基于目标检测技术,通过机械臂运动规划等功能,完成任务执行与环境交互功能。基于大模型的智慧零售教育科研平台同时具备商业应用、教学实训及科研实验的特性,是融合应用与科教一体的平台,因此其支持各类型高校专业实训、课程设计、毕业设计等实训环节的教学,也满足各科研院所基础实验测试及二次开发需求,实训平台主要有以下优势:
- 多功能性:基于大模型的智慧零售教育科研平台可以执行多种任务,包括语音交互、视觉抓取等。
- 智能化技术支持:基于大模型的智慧零售教育科研平台集成了人工智能技术,例如机器视觉、深度学习及大模型等前沿技术,能够实现环境感知和自主决策,提升实验的智能化水平,并且对于前沿的人工智能技术具备良好的适配性,各类最新智能算法及AI解决方案能够轻松在平台上验证,对于高层次人才培养和深度科研探索有坚实的基础支撑。
- 灵活性:平台结构设计灵活,可以在不同工作场景下自由移动和操作,适用于多种实验和项目需求。
- 自动化程度高:基于大模型的智慧零售教育科研平台具备自动化控制功能,能够通过编程实现自动化操作和任务执行,提高实验效率和精度。
- 跨学科应用:基于大模型的智慧零售教育科研平台涵盖了人工智能、控制工程、计算机等多个学科领域的知识和技术,可以为跨学科的实验和项目提供支持。
- 实践创新教学:基于大模型的智慧零售教育科研平台为学生提供了实践创新的平台,可以进行项目设计、编程控制、系统集成等实践操作,培养学生的创新能力和实践技能。
- 设备迭代更新:基于大模型的智慧零售教育科研平台采用模块化组成思想,每个组成部分都能够单独运行使用,因此后续升级与适配十分方便,用户无需整套返厂更新,使用配套器件即可更新硬件与软件。
- 教学资料配套:基于大模型的智慧零售教育科研平台教学科研平台配套各类型教学资料,包括实训文档、开发文档、实训讲解视频、二次开发实践视频以及实践讲师现场教学等全面的教学支撑,为客户群体提供人性化与定制化的使用与开发服务。
- 实训平台生态圈:基于大模型的智慧零售教育科研平台教学科研平台提供全方位的生态圈,用户可自行定制与替换各部件,以便完成特定的场景需求,并且基于大模型的智慧零售教育科研平台教学科研平台拥有独立的产品生态论坛,用户可以随时在论坛查找相关生态产品资料以及开发资料,极大地减少客户二次开发应用难度及周期。

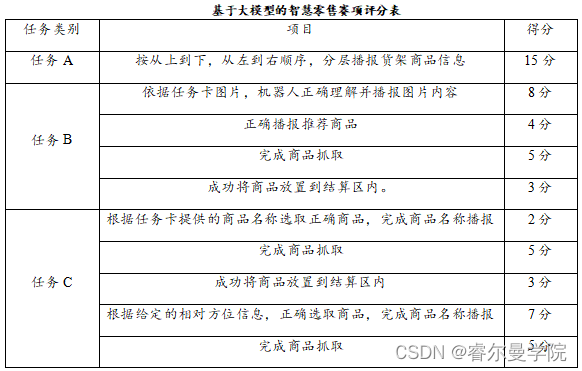
1.3.2竞赛支持
“中国机器人及人工智能大赛(CAAI)”是国内首个提出在机器人及人工智能领域,将关键技术的研发与应用有机结合的比赛。自1999年至2023年,中国机器人及人工智能大赛已成功举办了25届,已有600多所高校参与,累计超27万高校学生参赛是目前国内规模最大,影响力最强,专业水平最高的机器人竞赛。参赛院校及师生均可享受A类赛事奖励政策,其涉及计算机、电子、机械、信息、无人机、人工智能等方面,是多学科知识的本融合型大赛。产品能全面支撑师生参与CAAI的基于大模型的智慧零售赛项。
智慧零售竞赛场景设置如下图所示,货架上摆放有矿泉水、可乐、薯片、牛奶等日常零售柜商品,直线导轨台放置在货架前方,机械臂固定在直线导轨台上,可水平移动。具体尺寸、商品类型、商品价格以后续赛事群公布为准。


1.4资源
基于大模型的智慧零售教育科研平台配套全面的实训内容与资料,为教育客户群体提供涵盖机器人工程、人工智能、自动化、计算机、通信工程、电子信息等专业的课程教学与实训实验资源,并且提供产品论坛,用户可在论坛中交流与查找相关资料,产品的更新资料也会同步至论坛中,方便用户查收。
1.4.1课程
基于大模型的智慧零售教育科研平台提供系统性的教学实验实训内容,包括实训文档及实训视频,深入浅出的讲解基于大模型的智慧零售教育科研平台相关原理与开发流程,以下是部分课程资源概览:
| 主题 | 课程 | 内容(简述) | 课时 |
| 中控系统教学实训 | Linux系统基础 |
| 4 |
| Python基础 |
| 4 | |
| ROS操作系统 |
| 16 | |
| 物联网平台 |
| 8 |
| 主题 | 课程 | 内容(简述) | 课时 |
| 视觉系统教学实训 | 视觉传感器认知 |
| 4 |
| 深度相机技术应用 |
| 4 | |
| 深度学习及视觉识别技术 |
| 8 | |
| 视觉识别二维码及颜色 |
| 6 | |
| 手眼标定 |
| 2 |
| 主题 | 课程 | 内容(简述) | 课时 |
| 操作机构系统教学实训 | 执行机构本体 | 1.六轴机械臂简介及本体认知; 2.六轴机械臂通讯方法; 3.六轴机械臂示教器使用基础; 4.六轴机械臂示教器编程; | 8 |
| 机械臂仿真系统 | 1.ROS机器人操作系统简介及认知; 2.RVIZ中显示机械臂模型; 3.使用Moveit工具编程; 4.Moveit控制Gazebo中的仿真机械臂; 5.Moveit仿真避障规划; | 16 | |
| 执行机构二次开发 | 1.JSON协议应用; 2.机械臂API应用; 3.机械臂透传移动控制; 4.在线编程及拖动轨迹文件编程; | 16 | |
| 执行机构集成技术 | 1.机械臂控制器对外接口应用; 2.机械臂末端对外接口应用; 3.机械臂集成2指夹爪及五指灵巧手应用; 4.机械臂集成真空吸盘应用; | 8 |
| 主题 | 课程 | 内容(简述) | 课时 |
| 智慧零售竞赛套件应用实训内容 | 机器人组成原理 | 1.机器人系统理论介绍; 2.机械臂运动规划详解及应用; | 4 |
| ROS机器人 操作系统 | 1.ROS通信原理; 2.moveit轨迹规划实践应用; 3.Gazebo仿真实践; | 4 | |
| 视觉抓取 |
| 8 | |
| 二次开发实训 |
| 8 |
相关文章:
基于大模型的智慧零售教育科研平台——技术方案
一、概述 1.1背景 随着数字经济的快速发展和全社会数字化水平的升级,人工智能的积极作用越来越凸显,人工智能与各个行业的深度融合已成为促进传统产业转型升级的重要方式之一。ChatGPT的出现掀起了又一波人工智能发展热潮,人工智能行业发展势…...

C# using的几个用途
using 关键字有三个主要用途: 1.using 语句定义一个范围,在此范围的末尾将释放对象: string filePath "example.txt"; string textToWrite "Hello, this is a test message!"; // Use the using statement to ensure …...
MyBatis3.4全集笔记
MyBatis 1. MyBatis 简介 MyBatis 本是apache的一个开源项目iBatis, 2010年这个项目由apache software foundation 迁移到了google code,并且改名为MyBatis 。2013年11月迁移到Github。 iBATIS一词来源于“internet”和“abatis”的组合,是一个基于Ja…...
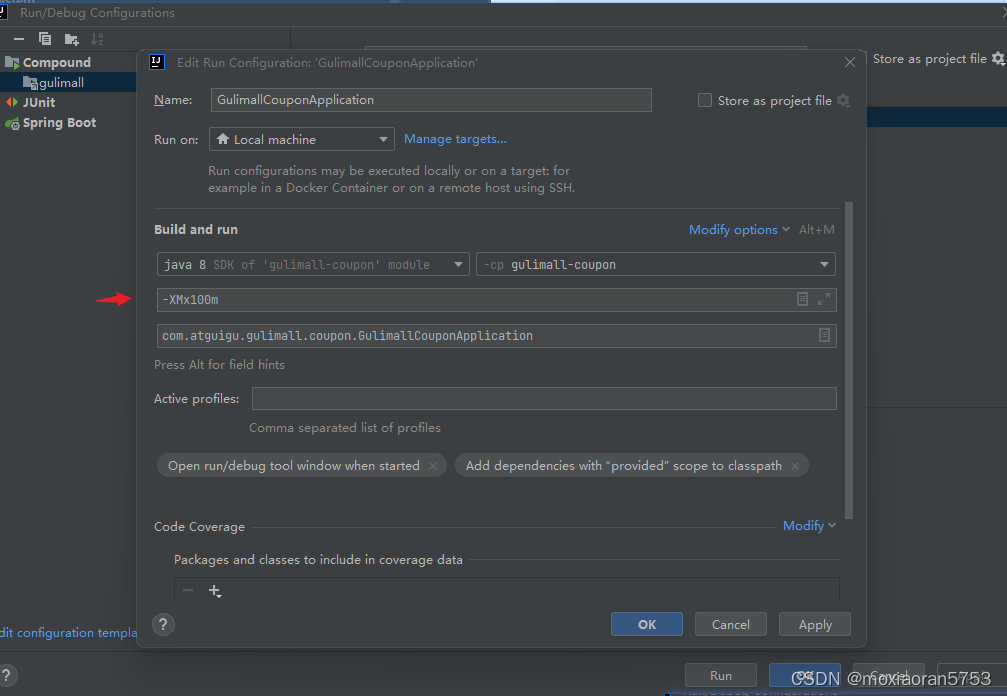
IDEA一键启动多个微服务
我们在做微服务项目开发的时候,每次刚打开IDEA,就需要把各个服务一个个依次启动,特别是服务比较多时,逐个点击不仅麻烦还费时。下面来说一下如何一键启动多个微服务。 操作步骤 点击Edit Configurations 2.点击“”,…...

【Python3】random.choices 权重随机选取 详解
random.choices是Python 3中random模块中的一个函数,用于从指定的序列中以指定的权重随机选择元素。下面我将对该函数进行详细介绍,并提供一些示例代码和注意事项。 函数签名: random.choices(population, weightsNone, *, cum_weightsNone…...

【面试题-015】Redis的线程模型是什么 为什么速度快
redis面试题 Redis的线程模型是什么 为什么速度快? Redis是一个开源的、高性能的键值对(key-value)数据库。它之所以速度快,主要得益于以下几个方面的设计: 单线程模型: Redis的操作是单线程的ÿ…...

EasyV开发人员的使用说明书
在可视化大屏项目时,开发人员通常需要承担以下任务: 技术实现:根据设计师提供的设计稿,利用前端技术(如HTML、CSS、JavaScript等)和后端技术(根据具体项目需求,可能是Java、Python、…...

构造列表初始化和构造初始化区别
构造列表初始化和构造初始化在C等编程语言中,是两种不同的初始化类实例成员的方式。以下是它们之间的主要区别: 构造列表初始化(初始化列表) 定义:初始化列表以一个冒号开始,接着是一个以逗号分隔的数据成…...

Message passing mechanism (消息传递机制)
objc_msgSend 是 Objective-C 运行时系统中的一个核心函数,用于实现消息传递机制。在 Objective-C 中,方法调用实际上是消息传递的过程,当你在代码中调用一个方法时,编译器会将其转换为 objc_msgSend 函数的调用。 objc_msgSend …...

详解 Spark SQL 代码开发之数据读取和保存
一、通用操作 /** 基本语法:1.读取:SparkSession.read[.format("format")[.option("...")]].load("path")2.保存:DataFrame.write[.format("format")[.option("...")]][.mode("Save…...

Pulsar 社区周报 | No.2024-05-30 | BIGO 百页小册《Apache Pulsar 调优指南》
“ 各位热爱 Pulsar 的小伙伴们,Pulsar 社区周报更新啦!这里将记录 Pulsar 社区每周的重要更新,每周发布。 ” BIGO 百页小册《Apache Pulsar 调优指南》 Hi,Apache Pulsar 社区的小伙伴们,社区 2024 上半年度的有奖问…...

第二证券股票杠杆:4分钟直线涨停!这一赛道,AH股集体爆发!
今日早盘,A股继续小幅震动收拾,首要股指涨跌互现,两市个股跌多涨少,成交有萎缩的趋势。 盘面上,医药、中字头、旅游、房地产等板块相对活跃,混合实践、玻璃基板、AI手机PC、光刻机等板块跌幅居前。 “中字…...

JavaScript 进阶征途:解锁Function奥秘,深掘Object方法精髓
个人主页:学习前端的小z 个人专栏:JavaScript 精粹 本专栏旨在分享记录每日学习的前端知识和学习笔记的归纳总结,欢迎大家在评论区交流讨论! 文章目录 🈵Function方法 与 函数式编程💝1 call 💝…...

斜拉桥智慧施工数字孪生
基于图扑自主研发的 HT for Web 产品,利用现场照片及 CAD 图纸,结合 PBR 材质,搭建了具有赛博朋克风格的智慧斜拉桥可视化解决方案,精准复现斜拉桥建造规划过程,辅助运维人员对桥梁基建过程的网格化管理。提高桥梁的建…...

【chatGPT API】Function Calling:将自然语言转换为API调用或数据库查询
文章目录 一. 介绍二. 常见用例与Function Calling调用逻辑三. 调用细节1. 调用行为:tool_choice2. 调用规定:functions 四. 实战:查询公司相关产品 一. 介绍 OpenAI可以根据用户的要求输出一个符合用户要求的入参值。然后用户拿到入参值之后…...
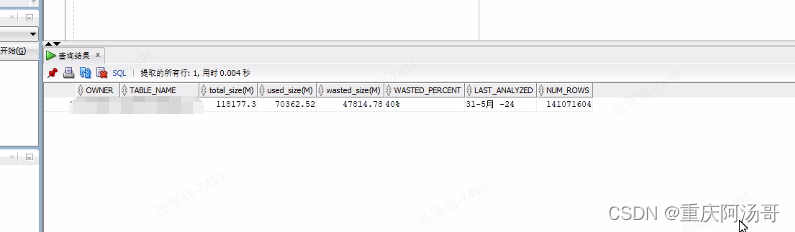
Oracle Hint /*+APPEND*/插入性能总结
oracle append用法 Oracle中的APPEND用法主要用于提高数据插入的效率。 基本用法:在使用了APPEND选项后,插入数据会直接加到表的最后面,而不会在表的空闲块中插入数据。这种做法不需要寻找freelist中的free block,从而避免了在…...
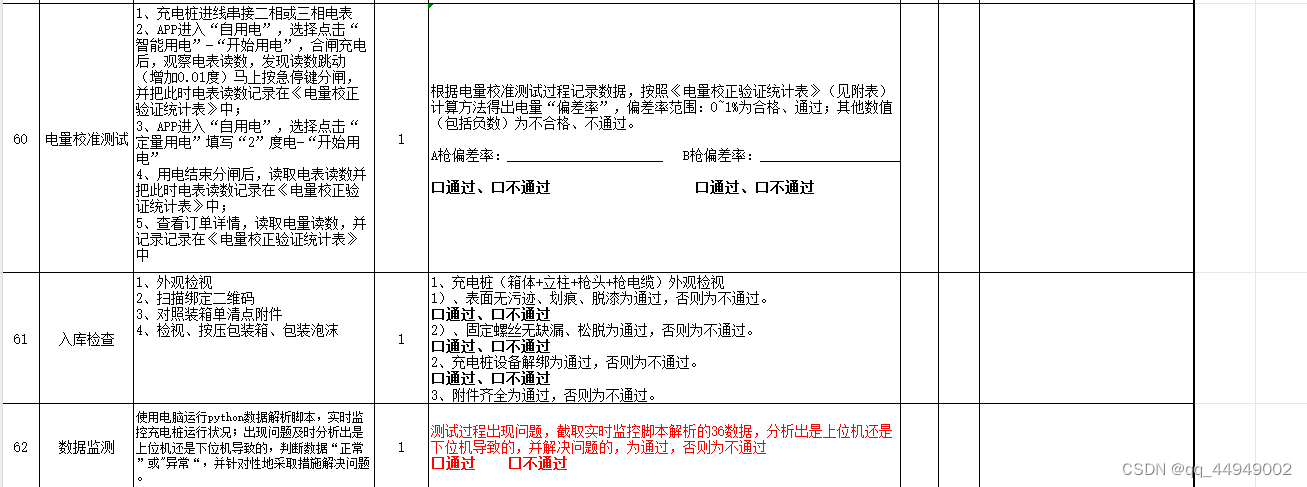
正邦科技(day3)
出厂测试 设备校准 这个需要注意的是校准电流、电压、电感的时候有时候负感器会装反,mcu会坏,需要flash一下清空内存...
mac电脑多协议远程管理软件:Termius 8.4.0激活版下载
Termius 是一款功能强大的跨平台远程访问工具,可用于管理和连接各种远程系统和服务器。它支持SSH、Telnet、SFTP和Serial协议,并提供了键盘快捷键、自动完成和多标签功能,使用户可以方便地控制和操作远程主机。 Termius 提供了端到端的加密保…...

网络攻击的常见形式
开篇 本篇文章来自于《网络安全 ——技术与实践》的学习整理笔记。 正篇 口令窃取 相比于利用系统缺陷破坏网络系统,最容易的方法还是通过窃取用户的口令进入系统。因为人们倾向于选择很糟糕的口令作为登录密码,所以口令猜测很容易成功。通常࿰…...

ReactDOM 18版本 使用createRoot 替换render详解
概述 React 18 提供了两个 root API,被称之为 Legacy Root API 和 New Root API: Legacy Root API:是指之前版本的 root API ReactDOM.render,它将创建一个以 “legacy” 模式运行的 root,其工作方式与 React 17 完全…...

基于LCL滤波器的光伏三相逆变并网模型 1.模型由光伏系统,逆变器,LCL滤波器和交流主网组成 2
基于LCL滤波器的光伏三相逆变并网模型1.模型由光伏系统,逆变器,LCL滤波器和交流主网组成 2.光伏采用扰动观测法实现最大功率输出,逆变器采用恒定直流母线电压控制策略 实现以下目标: 1.光伏维持在最大功率输出。 2.逆变器实现直流…...

2.5MW ANPC拓扑储能变流器PCS整流器仿真搭建之旅
储能变流器pcs整流器仿真模型,联系默认发百度,ANPC电路拓扑,2.5MW,电压外环,电流内环,2016版本的matlab在电力电子领域,储能变流器PCS(Power Conversion System)的整流器…...

OpenClaw镜像体验报告:千问3.5-9B云端性能实测
OpenClaw镜像体验报告:千问3.5-9B云端性能实测 1. 为什么选择云端体验OpenClaw 作为一个长期关注AI自动化工具的技术爱好者,我一直在寻找一个既安全又高效的本地AI助手方案。OpenClaw的出现让我眼前一亮——它能让AI像人类一样操作我的电脑,…...
)
干货 | SpringBoot 缓存实战:击穿、穿透、雪崩 通俗解决方案(附可落地代码)
一、前言做 Java 后端开发,只要用了 Redis 缓存,缓存击穿、缓存穿透、缓存雪崩这三个坑绕不开。面试必问、线上必踩。本文不讲晦涩底层源码,用大白话讲原理 SpringBoot 可直接复制的实战代码,新手能看懂,项目能直接上…...
,包含: 1.MPPT模块)
光储并网直流微电网仿真模型(matlab/simulink,2018),包含: 1.MPPT模块
光储并网直流微电网仿真模型(matlab/simulink,2018),包含: 1.MPPT模块,实现光伏输入最大功率跟踪; 2.储能电池模块; 3.超级电容模块; 控制策略简介: 糸统使用…...
✅)
计算机毕业设计:Python汽车销量数据挖掘与预测系统 Flask框架 scikit-learn 可视化 requests爬虫 AI 大模型(建议收藏)✅
博主介绍:✌全网粉丝10W,前互联网大厂软件研发、集结硕博英豪成立工作室。专注于计算机相关专业项目实战6年之久,选择我们就是选择放心、选择安心毕业✌ > 🍅想要获取完整文章或者源码,或者代做,拉到文章底部即可与…...

Cadence Virtuoso保姆级教程:从零完成反相器版图绘制、DRC到后仿真的完整流程
Cadence Virtuoso保姆级教程:从零完成反相器版图绘制、DRC到后仿真的完整流程 在集成电路设计领域,Cadence Virtuoso是业界公认的标准工具之一。对于初学者而言,掌握从原理图到版图再到后仿真的完整流程至关重要。本文将带领你一步步完成反相…...

Kafka消费者组性能调优实战:从瓶颈识别到极致优化
前言“Kafka性能调优,20%是调整配置,80%是理解你的工作负载。”这是无数生产环境事故总结出来的血泪教训。在生产实践中,很多团队遇到消费性能问题时,第一反应是“加机器、加分区、调参数”,结果往往事倍功半ÿ…...

谷歌发布Gemma 4模型,为低功耗设备带来复杂推理能力
谷歌发布了其最先进的开放权重人工智能模型家族Gemma 4,这标志着开放权重AI模型领域的重大进步。技术架构与性能突破Gemma 4基于与Gemini 3相同的架构基础构建,专门设计用于处理复杂推理任务,并支持在工作站和智能手机等低功耗设备上本地运行…...

2026经管大洗牌!只会记账/理论已死,再不考这10个证,迟早被AI取代!
2026经管行业变革与核心证书指南随着AI技术的快速发展,传统经管岗位面临巨大挑战。单纯掌握记账或理论知识的从业者可能面临淘汰风险。以下为未来五年内最具价值的10项认证,帮助从业者保持竞争力。CDA数据分析师证书的核心优势CDA数据分析师证书由国际数…...