CMakeLists.txt和Package.xml
CMakeLists.txt和Package.xml
CMakeLists.txt
总览
CMakeLists.txt 是用于定义如何构建 ROS (Robot Operating System) 包的 CMake 脚本文件。CMake 是一个跨平台的构建系统,用于自动化编译过程。在 ROS 中,CMakeLists.txt 文件指定了如何编译代码和链接库,以及如何安装各种文件和程序。以下是 CMakeLists.txt 的详细解释:
基本结构
CMakeLists.txt 文件通常包含以下部分:
-
CMake 最低版本要求:
- 指定编译此包所需的最低 CMake 版本。
cmake_minimum_required(VERSION 3.0.2) -
项目名称:
- 设置项目名称,通常与 ROS 包名称相同。
project(my_ros_package) -
查找依赖项:
- 使用
find_package命令查找编译包所需的依赖项。
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgs ) - 使用
-
设置 catkin 包:
- 使用
catkin_package命令定义包的属性,如包含的库、依赖项和包含目录。
catkin_package(# INCLUDE_DIRS include# LIBRARIES my_ros_package# CATKIN_DEPENDS roscpp rospy std_msgs# DEPENDS system_lib ) - 使用
-
指定头文件的路径:
- 通常用于包含库的头文件。
include_directories(# include${catkin_INCLUDE_DIRS} ) -
添加可执行文件:
- 使用
add_executable命令添加每个节点的可执行文件。
add_executable(${PROJECT_NAME}_node src/my_node.cpp) - 使用
-
添加依赖项:
- 使用
add_dependencies确保在编译节点之前生成所有消息和服务。
add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS}) - 使用
-
链接库:
- 使用
target_link_libraries将可执行文件与库链接起来。
target_link_libraries(${PROJECT_NAME}_node${catkin_LIBRARIES} ) - 使用
-
安装目标:
- 指定如何安装各种文件和程序,以便它们可以在 ROS 环境中找到。
install(TARGETS ${PROJECT_NAME}_nodeRUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION} ) -
其他指令:
- 如设置测试、配置文件和其他特殊构建指令。
重要性
CMakeLists.txt 文件对于 ROS 包的构建至关重要。它确保了代码能够根据定义的规则和依赖关系正确编译。良好维护的 CMakeLists.txt 文件对于项目的可移植性和可维护性非常重要,尤其是当涉及到大型项目或多人协作时。
此外,通过 CMakeLists.txt,开发者可以细粒度地控制编译过程,比如定义不同的构建类型(如调试或发布),以及设置特定的编译器标志。
1. find_package指令
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgs
)
这段代码是CMakeLists.txt文件中的一个部分,用于在ROS包中找到和包含依赖项。
-
find_package:这是CMake的一个命令,用于在构建过程中定位和使用外部项目或库。在这种情况下,它被用来找到catkin,这是ROS的一个构建系统。 -
catkin REQUIRED:指明catkin是必需的。如果CMake无法找到catkin,构建过程将停止。 -
COMPONENTS:后面跟着的是一个列表,指定了你的ROS包所依赖的其他ROS包或库。roscpp:ROS的C++客户端库,用于写C++节点。rospy:ROS的Python客户端库,用于写Python节点。std_msgs:一个标准消息包,包含了一些常用的消息类型,如整数、浮点数、字符串等。
2. add_executable指令
add_executable(${PROJECT_NAME}_node src/atr_pkg_node.cpp)
这行代码用于添加一个可执行文件到你的ROS包。
-
add_executable:这是CMake的命令,用于创建一个可执行文件。在这里,它指定了可执行文件的名称和源代码文件。 -
${PROJECT_NAME}_node:这是可执行文件的名称。${PROJECT_NAME}是一个变量,代表当前项目的名称。在这里,它被用来为可执行文件命名,通常后面会附加_node以表示这是一个ROS节点。 -
src/atr_pkg_node.cpp:这是可执行文件的源代码文件路径。这里假设你的源代码文件名为atr_pkg_node.cpp,位于src目录下。
3. add_dependencies指令
add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
这行代码为你的可执行文件添加构建依赖。
-
add_dependencies:这是CMake的命令,用于添加目标(在这种情况下是你的可执行文件)的依赖项。这确保了在构建你的节点之前,所有必需的头文件和服务消息都已经可用。 -
${PROJECT_NAME}_node:这是你之前用add_executable创建的目标(即可执行文件)。 -
${${PROJECT_NAME}_EXPORTED_TARGETS}和${catkin_EXPORTED_TARGETS}:这些是CMake变量,包含了所有必须在你的节点之前构建的目标。这通常包括由消息生成的目标,确保在构建你的节点之前,所有自定义消息、服务或操作的头文件都已生成。
总的来说,这些代码片段在ROS包的CMake配置中起着非常重要的作用,确保了包的依赖项被正确地找到和包含,可执行文件被正确地构建,以及所有必要的依赖在构建过程中得到满足。
4.target_link_libraries指令
这段代码是ROS包中CMakeLists.txt文件的一部分,用于配置ROS包的构建过程。它具体涉及到链接库的设置。下面是对这段代码的详细解释:
target_link_libraries(${PROJECT_NAME}_node${catkin_LIBRARIES}
)
-
target_link_libraries:这是CMake的一个命令,用于指定可执行文件或库应该链接哪些库。在构建一个目标(如可执行文件或库)时,它告诉CMake将指定的库链接到这个目标上。 -
${PROJECT_NAME}_node:这是之前使用add_executable命令创建的目标的名称。${PROJECT_NAME}是一个CMake变量,表示当前项目(即ROS包)的名称。通常情况下,${PROJECT_NAME}_node是可执行文件的名称,表示ROS包中的一个节点。 -
${catkin_LIBRARIES}:这是一个CMake变量,包含了所有由find_package(catkin REQUIRED COMPONENTS ...)找到的catkin组件的库。在ROS中,catkin_LIBRARIES变量通常包含了所有必要的ROS相关库,如roscpp(ROS的C++库)和其他你在CMakeLists.txt中声明为依赖的库。
简而言之,这个target_link_libraries命令确保你的可执行文件(节点)在构建时,会链接到所有在find_package中指定的、及其依赖的ROS和其他库。这对于确保你的节点能够正确地访问和使用这些库的功能是必要的。
Package.xml
总览
package.xml 文件是 ROS (Robot Operating System) 包的一个关键组件,用于定义包的元数据和依赖关系。这个文件遵循特定的 XML 结构,并提供了关于包的重要信息,包括名称、版本、维护者、许可证和依赖项。以下是 package.xml 的详细解释:
基本结构
package.xml 文件通常包含以下基本部分:
- 包名称 (
<name>): 包的唯一标识符。 - 版本 (
<version>): 包的版本号。 - 描述 (
<description>): 关于包的简短描述。 - 维护者 (
<maintainer>): 负责维护包的人的联系信息。 - 许可证 (
<license>): 指定包的开源许可证类型。 - 依赖关系:
<build_depend>: 构建时需要的依赖。<build_export_depend>: 构建和运行时需要的依赖。<exec_depend>: 运行时需要的依赖。<depend>: 同时是构建和运行时需要的依赖。
示例
下面是一个 package.xml 的示例:
<?xml version="1.0"?>
<package format="2"><name>example_package</name><version>0.0.1</version><description>An example ROS package</description><maintainer email="maintainer@example.com">Your Name</maintainer><license>BSD</license><build_depend>roscpp</build_depend><build_depend>std_msgs</build_depend><build_export_depend>roscpp</build_export_depend><exec_depend>roscpp</exec_depend><exec_depend>std_msgs</exec_depend><export><!-- Other export tags go here --></export>
</package>
在这个示例中:
- 包名为
example_package。 - 版本号设为
0.0.1。 - 提供了包的简短描述。
- 维护者信息包括名字和电子邮件地址。
- 指定了 BSD 许可证。
- 包括了对
roscpp和std_msgs的依赖,这些在构建和运行时都是必需的。
重要性
package.xml 文件对于 ROS 包的构建和分发至关重要。它不仅提供了包的基本信息,还确定了包与其他包之间的关系。正确配置 package.xml 对于确保包的正确编译和运行是必要的。
当你从源代码编译 ROS 包或者使用 ROS 工具(如 rospack、roslaunch)管理包时,package.xml 中的信息都会被使用。因此,维护一个准确、完整的 package.xml 文件对于任何 ROS 项目都是非常重要的。
<buildtool_depend>catkin</buildtool_depend><build_depend>roscpp</build_depend><build_depend>rospy</build_depend><build_depend>std_msgs</build_depend><build_export_depend>roscpp</build_export_depend><build_export_depend>rospy</build_export_depend><build_export_depend>std_msgs</build_export_depend><exec_depend>roscpp</exec_depend><exec_depend>rospy</exec_depend><exec_depend>std_msgs</exec_depend>
这段代码是来自ROS包的package.xml文件,它定义了包的依赖项。package.xml文件在ROS中用于声明包的元数据和依赖关系,这对于包的构建和运行至关重要。下面是对这段代码的详细解释:
-
<buildtool_depend>catkin</buildtool_depend>:指定了一个构建工具依赖。这表示此包在构建过程中需要catkin。catkin是ROS的构建系统,用于编译和配置ROS包。 -
<build_depend>:这些标签指定了构建依赖。构建依赖是指在编译时间需要的依赖项。在这个例子中,它包括了roscpp、rospy和std_msgs。roscpp:ROS的C++客户端库,用于C++节点的开发。rospy:ROS的Python客户端库,用于Python节点的开发。std_msgs:包含标准消息类型的ROS包,这些消息在不同的ROS节点之间进行通信时常常用到。
-
<build_export_depend>:这些标签指定了构建导出依赖。这意味着当其他包依赖于此包时,这些依赖也将被考虑。在这个例子中,同样包括了roscpp、rospy和std_msgs。 -
<exec_depend>:这些标签指定了执行依赖,即在运行时需要的依赖项。在这个例子中,也包括了roscpp、rospy和std_msgs。这意味着当此包的节点被运行时,这些依赖项需要被满足。
总的来说,这段代码详细描述了包的依赖关系,包括构建工具、构建时依赖、构建导出依赖以及执行时依赖。这些信息对于ROS的构建系统来说是必需的,以确保包可以正确地编译和运行。
后续增加,减少,更改依赖
在ROS(Robot Operating System)中更改依赖时,需要修改CMakeLists.txt和package.xml两个文件。这些文件定义了ROS包的构建和运行时依赖。以下是详细的步骤说明:
修改package.xml
package.xml文件定义了包的元数据和依赖关系。当你需要添加、移除或更改依赖时,应相应地更新这个文件。
-
添加依赖:
- 使用
<depend>标签添加新的依赖。这个标签表示包在编译和运行时都需要这个依赖。 - 如果依赖仅在编译时需要,使用
<build_depend>;如果仅在运行时需要,使用<exec_depend>。
- 使用
-
移除依赖:
- 直接删除相应的依赖标签。
-
修改依赖:
- 替换或更改现有的依赖标签。
例如,假设你需要添加一个名为sensor_msgs的依赖:
<depend>sensor_msgs</depend>
修改CMakeLists.txt
CMakeLists.txt控制着包的构建过程。你需要在这个文件中添加、移除或更改find_package()中的依赖项。
-
添加依赖:
- 在
find_package(catkin REQUIRED COMPONENTS ...)部分添加新的依赖项。
- 在
-
移除依赖:
- 从
find_package()中删除不再需要的依赖项。
- 从
-
修改依赖:
- 根据需要更改
find_package()中的依赖项。
- 根据需要更改
例如,添加sensor_msgs依赖:
find_package(catkin REQUIRED COMPONENTSroscppstd_msgssensor_msgs
)
重构建包
修改package.xml和CMakeLists.txt后,需要重新构建ROS包以应用这些更改:
-
在终端中,导航到你的catkin工作空间(通常是
~/catkin_ws)。 -
运行
catkin_make命令:cd ~/catkin_ws catkin_make
这将重新构建你的包,包括任何新添加的依赖。
测试包
更改依赖后,建议进行适当的测试以确保包正常工作,并且新的依赖没有引入任何问题。
总结
通过适当地管理package.xml和CMakeLists.txt文件,你可以确保你的ROS包正确地包含了所有必要的依赖,这对于包的功能性、可移植性和维护性至关重要。
相关文章:

CMakeLists.txt和Package.xml
CMakeLists.txt和Package.xml CMakeLists.txt 总览 CMakeLists.txt 是用于定义如何构建 ROS (Robot Operating System) 包的 CMake 脚本文件。CMake 是一个跨平台的构建系统,用于自动化编译过程。在 ROS 中,CMakeLists.txt 文件指定了如何编译代码和链…...

Debian常用命令详解
Debian常用命令详解 Debian是一个流行的Linux发行版,它以其稳定性、强大的包管理系统和丰富的软件仓库而著称。对于Debian用户来说,掌握一些常用的命令行工具和命令是日常系统管理和维护的基础。下面,我们将介绍一些Debian系统中常用的命令。…...
代码随想录算法训练营day29|491.递增子序列、46.全排列、47.全排列II
递增子序列 491. 非递减子序列 - 力扣(LeetCode) 非递减子序列,则答案的子集中,需保持下一个元素大于等于前一个元素的顺序,由于题目中指出,所有的子序列长度需大于等于2,考虑当条件为path.siz…...

【ARM Cache 与 MMU 系列文章 7.8 – ARMv8/v9 MMU Table 表分配原理及其代码实现 2】
请阅读【ARM Cache 及 MMU/MPU 系列文章专栏导读】 及【嵌入式开发学习必备专栏】 文章目录 MMU Table 表分配原理及其代码实现MMU Table 分配代码实现MMU Table 表分配原理及其代码实现 在做映射的时候所映射的地址范围最大只能是某一级 level table 中 entry 所能支持的最大…...
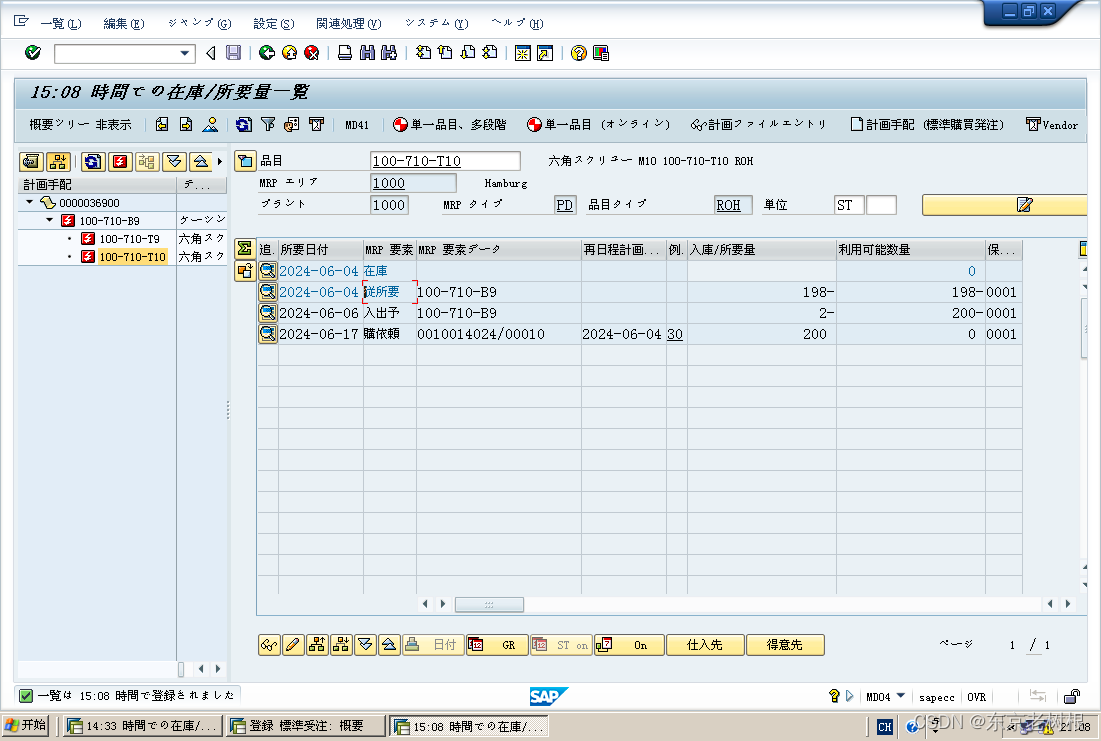
SAP PP学习笔记17 - MTS(Make-to-Stock) 按库存生产(策略70)
上几章讲了几种策略,策略10,11,30,40。 SAP PP学习笔记14 - MTS(Make-to-Stock) 按库存生产(策略10),以及生产计划的概要-CSDN博客 SAP PP学习笔记15 - MTS(Make-to-St…...

网页音频提取在线工具有哪些 网页音频提取在线工具下载
别再到处去借会员账号啦。教你一招,无视版权和地区限制,直接下载网页中的音频文件。没有复杂的操作步骤,也不用学习任何代码。只要是网页中播放的音频文件,都可以把它下载到本地保存。 一、网页音频提取在线工具有哪些 市面上的…...

【ARM Cache 系列文章 2.1 -- Cache PoP 及 PoDP 介绍】
请阅读【ARM Cache 及 MMU/MPU 系列文章专栏导读】 及【嵌入式开发学习必备专栏】 文章目录 PoP 及 PoDPCache PoDPCache PoP应用和影响PoP 及 PoDP Cache PoDP 点对深度持久性(Point of Deep Persistence, PoDP)是内存系统中的一个点,在该点达到的任何写操作即使在系统供电…...

一文了解JVM面试篇(上)
Java内存区域 1、如何解释 Java 堆空间及 GC? 当通过 Java 命令启动 Java 进程的时候,会为它分配内存。内存的一部分用于创建 堆空间,当程序中创建对象的时候,就从对空间中分配内存。GC 是 JVM 内部的一 个进程,回收无效对象的内存用于将来的分配。 2、JVM 的主要组成…...

C#WPF控件Textbox绑定浮点型数据限制小数位方法
本文讲解C#WPF控件Textbox绑定浮点型数据限制小数位方法。 XAML中,使用StringFormat来格式化TextBox的文本 <Window x:Class="WpfApp.MainWindow"xmlns="http://schemas.microsoft.com/winfx/2006/xaml/presentation"xmlns:x="http://schemas.m…...
mysql引入表名称的注意事项
1、遇到问题 mapper中的文件是这样的 解析出来的sql是这样的 sql显示为:select * from ‘tableName’ 2、解决方法 mapper文件种使用${tableName}而不是#{tableName}...
C语言数据结构快速排序的非递归、归并排序、归并排序的非递归等的介绍
文章目录 前言一、快速排序非递归二、归并排序五、归并排序非递归总结 前言 C语言数据结构快速排序的非递归、归并排序、归并排序的非递归等的介绍 一、快速排序非递归 快速排序非递归的定义 快速排序非递归,需要使用栈来实现。将左右下标分别push到栈中。在栈为…...
学生成绩管理系统(大一大作业)
功能 实现添加,排序,修改,保存等功能 库函数 #include<stdio.h> #include<stdlib.h> #include<windows.h> #include<string.h> 头文件 #define functioncreate(major) void major##compare(mana mn){\int i,j,s…...
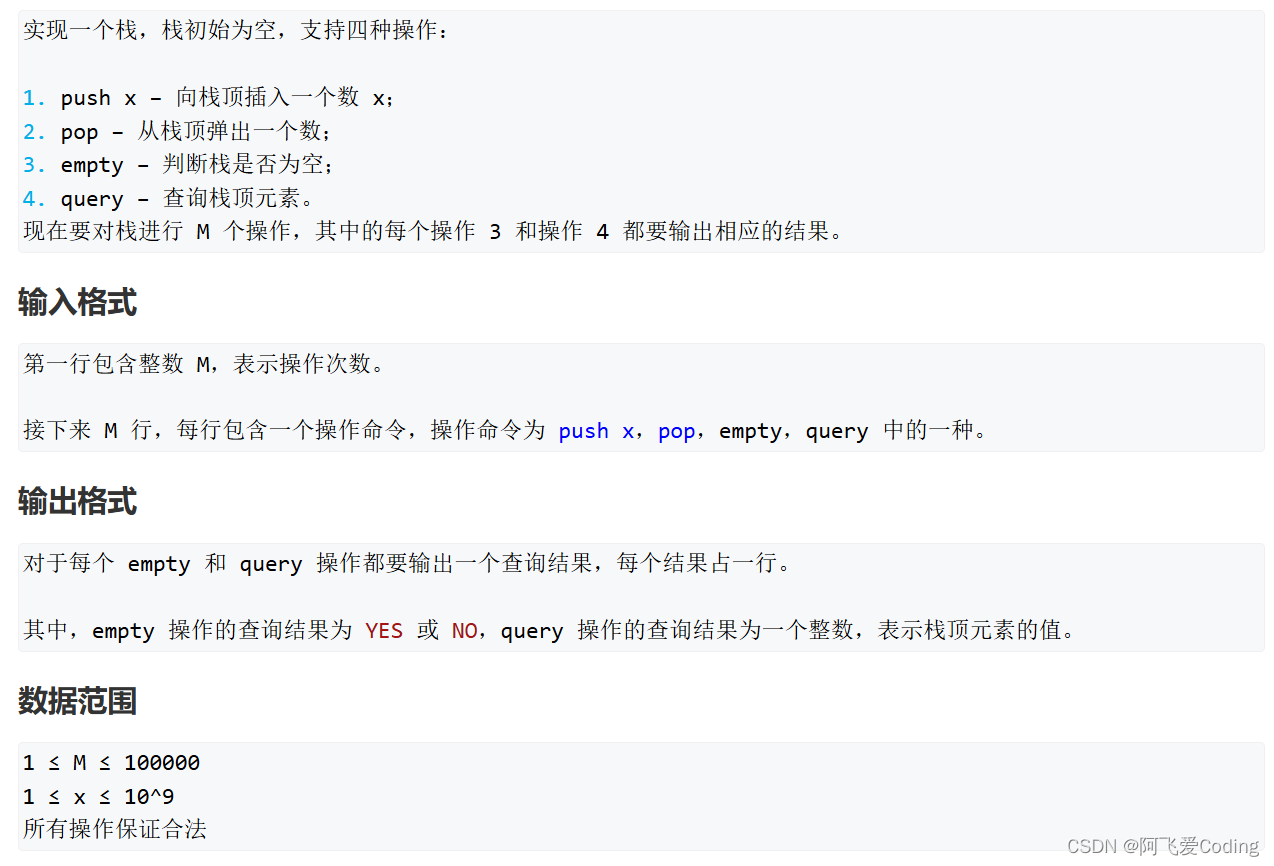
数据结构:模拟栈
数据结构:模拟栈 题目描述参考代码 题目描述 输入样例 10 push 5 query push 6 pop query pop empty push 4 query empty输出样例 5 5 YES 4 NO参考代码 #include <iostream>using namespace std;const int N 1000010;int m, x; int q[N]; string op; int…...

02-2.3.6 顺序表和链表的比较
喜欢《数据结构》部分笔记的小伙伴可以订阅专栏,今后还会不断更新。🧑💻 此外,《程序员必备技能》专栏和《程序员必备工具》专栏(该专栏暂未开设)日后会逐步更新,感兴趣的小伙伴可以点一下订阅…...
C++ : 模板初阶
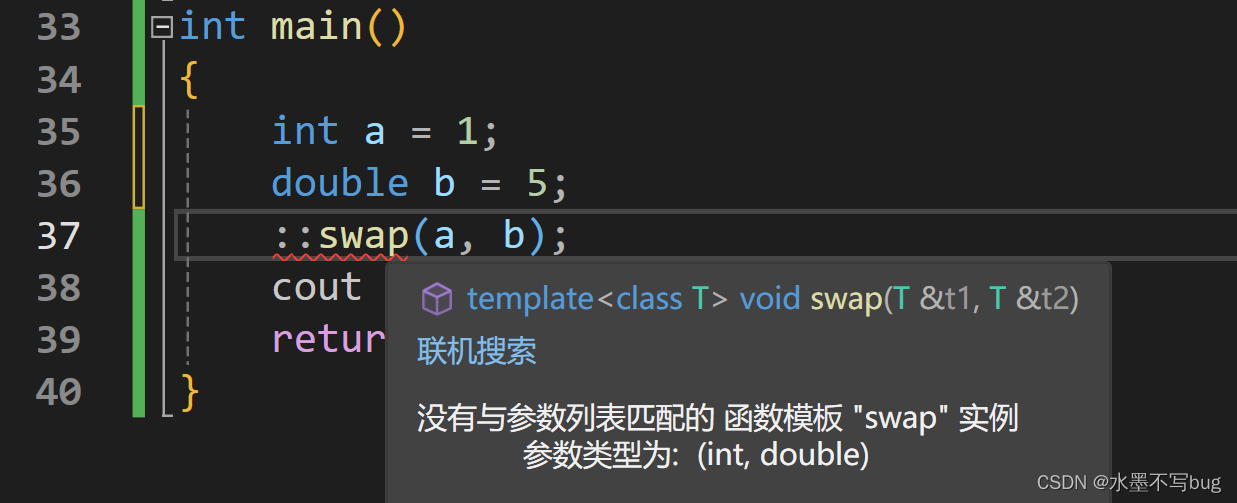
标题:C : 模板初阶 水墨不写bug 正文开始: C语言的问题 : 写不完的swap函数 在学习C语言时,我们有一个经常使用的函数swap函数,它可以将两个对象的值交换。 我们通常这样实现它: void swap(int t1,int t2)…...
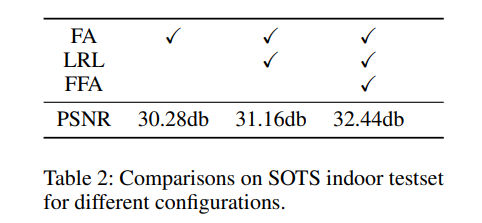
FFA-Net:用于单图像去雾的特征融合注意力网络
摘要 论文链接:https://arxiv.org/pdf/1911.07559v2 在这篇论文中,我们提出了一种端到端的特征融合注意力网络(FFA-Net)来直接恢复无雾图像。FFA-Net架构由三个关键组件组成: 一种新颖的特征注意力(FA&…...

网工内推 | 联通公司,云计算售前,AWS认证优先
01 联通数字科技有限公司 🔷招聘岗位:云计算售前工程师 🔷职责描述: 1.了解私有云,公有云,混合云等云计算技术知识,了解云计算行业现状及发展趋势。 2.承担区域项目售前工作支持,为…...

[Redis]Zset类型
Zset有序集合相对于字符串、列表、哈希、集合来说会有一些陌生。 它保留了集合不能有重复成员的特点,但与集合不同的是,有序集合中的每个元素都有一个唯一的浮点类型的分数(score)与之关联,着使得有序集合中的元素是可…...
【云原生】Kubernetes----Ingress对外服务
目录 引言 一、K8S对外方式 (一)NodePort 1.作用 2.弊端 3.示例 (二)externalIPs 1.作用 2.弊端 3.示例 (三)LoadBalancer 1.作用 2.弊端 (四)Ingress 二、Ingress的…...

项目管理之maven svn
管理jar包之间依赖关系 编译、打包、清理、测试等一系列构建工具 一、Maven的标志 1、每一个maven工程都有一个pom.xml maven项目坐标 <groupId>com.aaa</groupId>//项目路径 <artifactId>web</artifactId>项目名称 <version>0.0.1-SNAPS…...

利用快马平台快速构建你的Skill-Vetter技能评估原型
利用快马平台快速构建你的Skill-Vetter技能评估原型 最近在做一个技能评估工具的原型验证,发现用传统方式从零开始搭建实在太费时间。后来尝试了InsCode(快马)平台,整个过程变得特别顺畅。这里分享一下如何用这个平台快速构建一个编程技能评估原型。 原…...

OpenClaw多模型路由策略:混合Phi-3-vision-128k-instruct与文本模型的实践
OpenClaw多模型路由策略:混合Phi-3-vision-128k-instruct与文本模型的实践 1. 为什么需要多模型路由? 去年夏天,我尝试用OpenClaw自动化处理团队的技术文档时,遇到了一个典型问题:当文档中包含大量截图和图表时&…...

C语言实战:用栈结构解析括号匹配的三种典型错误
1. 为什么括号匹配是编程基本功 刚学C语言那会儿,我最怕遇到段错误(Segmentation Fault)。有次调试了整整两天,最后发现是少写了个右花括号。这种痛只有程序员才懂——括号就像代码的标点符号,漏一个整个程序就崩溃了。 用栈处理括号匹配之所…...
)
智慧算力枢纽中心建设方案:从“烟囱林立”到“云网融合”的数字化重构(PPT)
摘要:本文基于《智慧算力枢纽中心建设方案》,深度剖析了在数字经济爆发式增长背景下,如何通过“云-网-端”一体化架构解决传统IT基础设施“资源孤岛、运维割裂、安全脆弱”的行业痛点。文章详细阐述了从传统服务器向全栈资源池化演进的技术路…...

稳定性与生态性的平衡:Windows 11 LTSC系统微软商店完整解决方案
稳定性与生态性的平衡:Windows 11 LTSC系统微软商店完整解决方案 【免费下载链接】LTSC-Add-MicrosoftStore Add Windows Store to Windows 11 24H2 LTSC 项目地址: https://gitcode.com/gh_mirrors/ltscad/LTSC-Add-MicrosoftStore Windows 11 LTSC…...

EtherCAT-8 从站FSMC接口优化与性能调优
1. 为什么需要优化EtherCAT从站的FSMC接口 在工业自动化领域,EtherCAT因其出色的实时性能被广泛应用。作为从站控制器的核心,FSMC(Flexible Static Memory Controller)接口的性能直接影响整个系统的响应速度。我曾在多个项目中遇到…...

BilibiliDown:B站视频高效下载的4个核心解决方案
BilibiliDown:B站视频高效下载的4个核心解决方案 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirrors/bi/Bil…...

ModTheSpire技术全解析:从模组加载到高级开发指南
ModTheSpire技术全解析:从模组加载到高级开发指南 【免费下载链接】ModTheSpire External mod loader for Slay The Spire 项目地址: https://gitcode.com/gh_mirrors/mo/ModTheSpire 引言:为何需要模组加载器? 当你在《Slay The Spi…...

在物联网应用中使用 MQTT 而不是 HTTP?
然后还实际用 MQTT 实战了一下,大家感兴趣可以看看,下边是原内容: 前两年有幸参与到一个智能家居项目的开发,由于之前都没有过这方面的开发经验,所以对智能硬件的开发模式和技术栈都颇为好奇。 产品是一款可燃气体报警…...

提升编码效率:在快马平台利用多模型切换,快速生成复杂表格组件
最近在开发一个数据管理后台时,遇到了一个比较棘手的需求:需要实现一个功能完善的交互式表格组件。这个表格不仅要展示模拟的用户数据,还要支持多条件筛选、动态排序和分页功能。作为一个前端经验有限的开发者,我决定尝试使用InsC…...