45.在ROS中实现global planner(1)
前文move_base介绍(4)简单介绍move_base的全局路径规划配置,接下来我们自己实现一个全局的路径规划
1. move_base规划配置
ROS1的move_base可以配置选取不同的global planner和local planner, 默认move_base.cpp#L70中可以看到是读取该参数决定的`
private_nh.param("base_global_planner", global_planner, std::string("navfn/NavfnROS"));private_nh.param("base_local_planner", local_planner, std::string("base_local_planner/TrajectoryPlannerROS"));
我们可以通过配置base_global_planner和base_local_planner参数修改不同的算法
ros1 navigation中提供了3种base_global_planner, 分别是
navfn/NavfnROSglobal_planner::GlobalPlannercarrot_planner/CarrotPlanner
下面我们自己实现一个全局的路径规划,并在模拟器测试其执行效果
2. 实现原理
2.1 加载对象
private_nh.param("base_global_planner", global_planner, std::string("navfn/NavfnROS"));
上面我们已经知道 通过参数配置来决定加载哪一个全局规划器,继续跟踪可以看到
查看源码 move_base.cpp#L125 & move_base.h#L210
pluginlib::ClassLoader<nav_core::BaseGlobalPlanner> bgp_loader_;
planner_ = bgp_loader_.createInstance(global_planner);
pluginlib可以参见这里
pluginlib::ClassLoader<nav_core::BaseGlobalPlanner>::createInstance根据输入参数名,加载so,并且获取到库的导出类,且创建该类的一个实例planner_即为该指向该实例的指针, 有了这个对象,就可以通过该成员干活了
2.2 BaseGlobalPlanner接口
planner_定义在move_base.h#L185
boost::shared_ptr<nav_core::BaseGlobalPlanner> planner_;
前面返回的planner_类型可以看到是nav_core::BaseGlobalPlanner类型,我们先来看下该类,在nav_core#L48
class BaseGlobalPlanner{public:virtual bool makePlan(const geometry_msgs::PoseStamped& start, const geometry_msgs::PoseStamped& goal, std::vector<geometry_msgs::PoseStamped>& plan) = 0;virtual bool makePlan(const geometry_msgs::PoseStamped& start, const geometry_msgs::PoseStamped& goal, std::vector<geometry_msgs::PoseStamped>& plan,double& cost){cost = 0;return makePlan(start, goal, plan);}virtual void initialize(std::string name, costmap_2d::Costmap2DROS* costmap_ros) = 0;virtual ~BaseGlobalPlanner(){}protected:BaseGlobalPlanner(){}};
可以看到该类是一个接口类,需要继承该接口做相应的实现,主要接口比较简单,就两个, initialize和makePlan, 顾名思义一个初始化,一个规划路径
initialize
传入了name, 以及地图信息makePlan
传入起点,目标点,返回plan
我们也可以看看在move_base对应接口的调用
-
move_base.cpp#L126
在创建完成立即调用完成初始化 -
move_base.cpp#L496
进行全局路径规划
if(!planner_->makePlan(start, goal, plan) || plan.empty()){...}
``
在MoveBase::makeplan调用了该函数,返回的plan, 保存后用于local planner的输入
3. 实现global planner
3.1 实现步骤
实现一个自己的全局规划需要下面几个步骤
- 继承
nav_core::BaseGlobalPlanner实现接口 - 导出该实现类
- 添加
plugin.xml插件描述文件并导出 - 修改
move_base配置使用
3.2 实现接口
- 创建包
mkdir -p ~/pibot_ros/ros_ws/src
cd ~/pibot_ros/ros_ws/src
catkin_create_pkg sample_global_planner
创建完成添加一个cpp和h文件,新增一个类继承与nav_core::BaseGlobalPlanner
上面已经看到该接口定义 我们继承并对两个接口initialize和makePlan实现即可
initialize
初始化我们暂时先空实现
void GlobalPlanner::initialize(std::string name, costmap_2d::Costmap2DROS *costmap_ros)
{
}
makePlan
规划路径的接口给我们输入起点和终点,我们输出规划出的plan(如可以规划,同时返回true,反之返回false), 我们暂时不考虑具体实现,输出一条从起点到终点的直线路径,这应该是初中几何知识,比较简单如下
bool GlobalPlanner::makePlan(const geometry_msgs::PoseStamped &start,const geometry_msgs::PoseStamped &goal, std::vector<geometry_msgs::PoseStamped> &plan)
{ROS_INFO("make plan start:[%f %f], goal:[%f %f]", start.pose.position.x, start.pose.position.y, goal.pose.position.x, goal.pose.position.y);plan.clear();float yaw = atan2(goal.pose.position.y - start.pose.position.y, goal.pose.position.x - start.pose.position.x);int n = 0;float goal_distance = sqrt(pow((start.pose.position.x - goal.pose.position.x), 2) + pow((start.pose.position.y - goal.pose.position.y), 2));float delta = 0.1; // 间隔delta输出start至end的直线上的点 我们间隔0.1取直线上的所有点,放到输出的参数plan里while (n * delta < goal_distance){geometry_msgs::PoseStamped pose = goal;pose.pose.position.x = (n * delta) * cos(yaw) + start.pose.position.x;pose.pose.position.y = (n * delta) * sin(yaw) + start.pose.position.y;++n;plan.push_back(pose);}plan.push_back(goal); // 这里别忘了终点return !plan.empty();
}
- 添加相应的CMakeList.txt
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(include${catkin_INCLUDE_DIRS}
)## Declare a C++ library
add_library(${PROJECT_NAME}src/planner_node.cpp
)## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(${PROJECT_NAME} ${catkin_LIBRARIES})
3.3 导出类
参考navigation里面, 添加宏导出该类
PLUGINLIB_EXPORT_CLASS(sample_global_planner::GlobalPlanner, nav_core::BaseGlobalPlanner)
3.3 添加plugin.xml
添加一个bgp_plugin.xml
<library path="lib/libsample_global_planner"><class name="sample_global_planner/GlobalPlanner" type="sample_global_planner::GlobalPlanner" base_class_type="nav_core::BaseGlobalPlanner"><description>A sample implementation of a grid based planner </description></class>
</library>
3.4 编译
cd ~/pibot_ros/ros_ws
catkin_make
3.5 修改配置测试
修改~/pibot_ros/src/pibot_simulator/move_base_params.yaml
# base_global_planner: global_planner/GlobalPlanner
base_global_planner: sample_global_planner/GlobalPlanner
global_planner/GlobalPlanner ----> sample_global_planner/GlobalPlanner
- 启动模拟器
pibot_simulator
- 查看当前的
global_planner
❯ rosparam get /move_base/base_global_planner
sample_global_planner/GlobalPlanner # 输出sample_global_planner/GlobalPlanner表示插件已经被正确加载
- 启动rviz发送点位,选点导航测试
pibot_view
3.6 路径显示
上面测试可以看到可以规划已经完成, dwa的局部规划已经启动, 为了方便查看全局全规划路径的输出,我们在makeplan完成后发出path的topic
void GlobalPlanner::publishPlan(const std::vector<geometry_msgs::PoseStamped> &path)
{nav_msgs::Path gui_path;gui_path.poses.resize(path.size());gui_path.header.frame_id = frame_id_;gui_path.header.stamp = ros::Time::now();for (unsigned int i = 0; i < path.size(); i++){gui_path.poses[i] = path[i];}plan_pub_.publish(gui_path);
}
把 rviz
Global Map和Local Map中的dwa planner关闭, 只显示Full Plan
修改
move_base_params.yaml中planner_frequency值, 0 只规划一次, >0 规划频率
3.7 测试结果
- 选择空旷区域,可以看到可以正常规划,同时控制也可以启动完成,到达目的地

- 跨过障碍物,可以看到规划出路径,显然无法控制过去

4. 总结
本文简单实现了一个global planner的插件,显然实际没啥用,不过可以作为一个模板,基于该模板实现自己的算法。后面我们将基于该模板实现可用的全局规划。
本文代码见sample_global_planner
相关文章:
45.在ROS中实现global planner(1)
前文move_base介绍(4)简单介绍move_base的全局路径规划配置,接下来我们自己实现一个全局的路径规划 1. move_base规划配置 ROS1的move_base可以配置选取不同的global planner和local planner, 默认move_base.cpp#L70中可以看到是…...
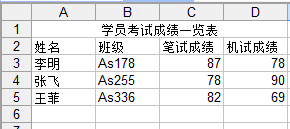
Java中导入、导出Excel——HSSFWorkbook 使用
一、介绍 当前B/S模式已成为应用开发的主流,而在企业办公系统中,常常有客户这样子要求:你要把我们的报表直接用Excel打开(电信系统、银行系统)。或者是:我们已经习惯用Excel打印。这样在我们实际的开发中,很多时候需要…...

c#数据结构-列表
列表 数组可以管理大量数组,但缺点是无法更变容量。 创建小了不够用,创建大了浪费空间。 无法预测需要多少大小的时候,可能范围越大,就会浪费越多的空间。 所以,你可能会想要一种可以扩容的东西,代替数组…...
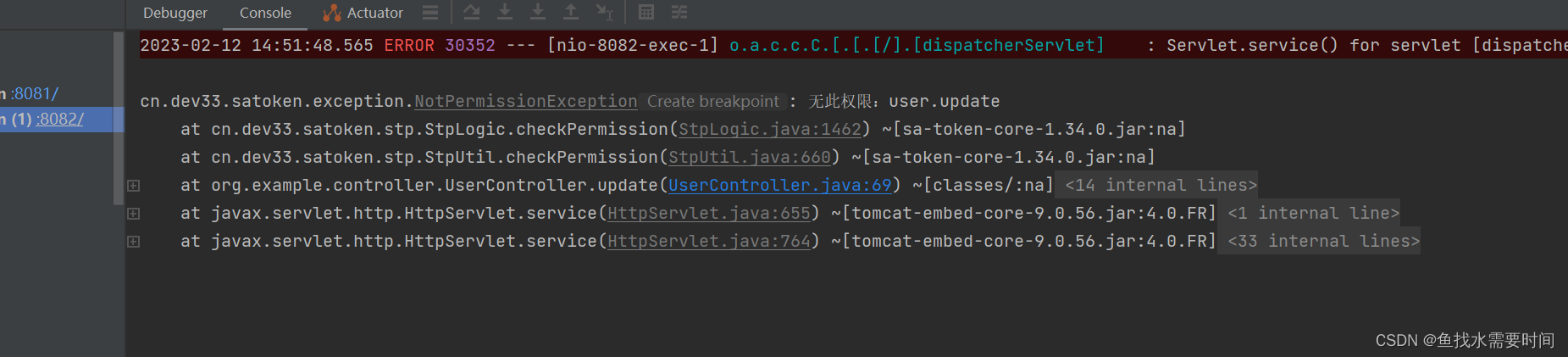
Sa-Token实现分布式登录鉴权(Redis集成 前后端分离)
文章目录1. Sa-Token 介绍2. 登录认证2.1 登录与注销2.2 会话查询2.3 Token 查询3. 权限认证3.1 获取当前账号权限码集合3.2 权限校验3.3 角色校验4. 前后台分离(无Cookie模式)5. Sa-Token 集成 Redis6. SpringBoot 集成 Sa-Token6.1 创建项目6.2 添加依…...

leaflet显示高程
很多地图软件都能随鼠标移动动态显示高程。这里介绍一种方法,我所得出的。1 下载高程数据一般有12.5m数据下载,可惜精度根本不够,比如mapbox的免费在线的,或者91卫图提供百度网盘打包下载的,没法用,差距太大…...
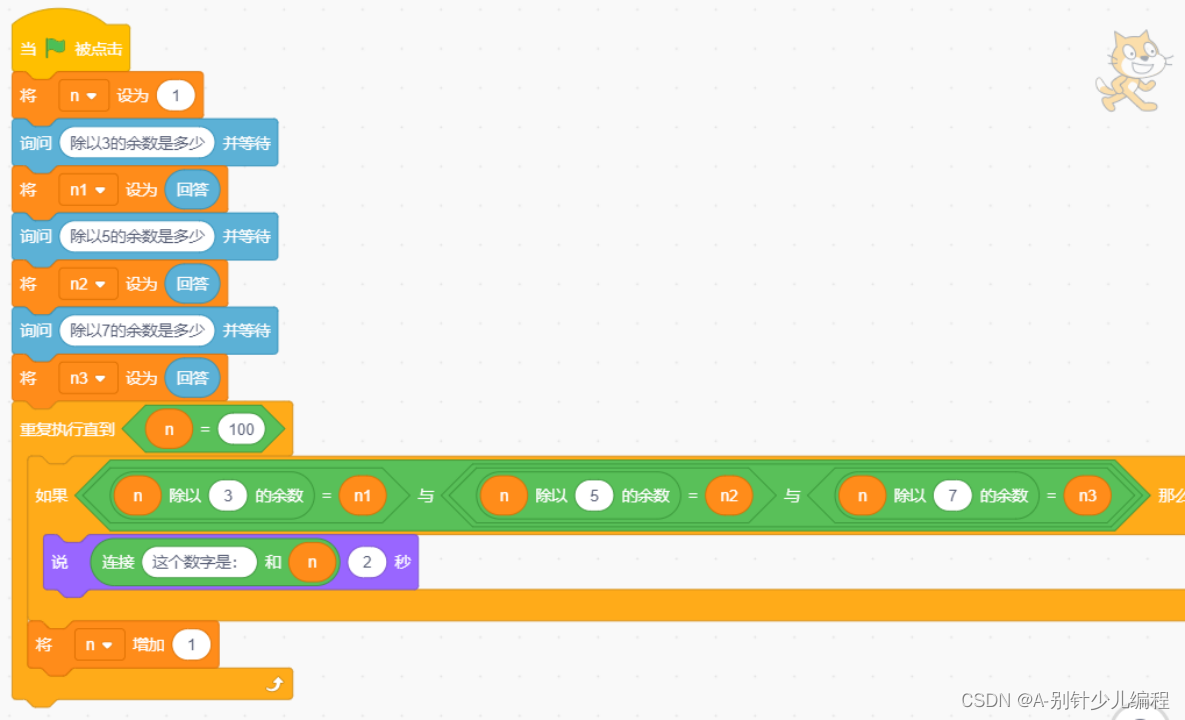
电子学会2022年12月青少年软件编程(图形化)等级考试试卷(三级)答案解析
目录 一、单选题(共25题,共50分) 二、判断题(共10题,共20分) 三、编程题(共3题,共30分) 青少年软件编程(图形化)等级考试试卷(三级) 一、单选题(共25题,共50分) 1. 默认小猫角色…...
ubuntu 驱动更新后导致无法进入界面
**问题描述: **安装新ubuntu系统后未禁止驱动更新导致无法进入登录界面。 解决办法: 首先在进入BIOS中,修改设置以进行命令行操作,然后卸载已有的系统驱动,最后安装新的驱动即可。 开机按F11进入启动菜单栏…...
解决访问GitHub时出现的“您的连接不是私密连接”的问题!
Content问题描述解决办法问题描述 访问github出现您的连接不是私密连接问题,无法正常访问,如下图所示: 解决办法 修改hosts文件。hosts文件位于:C:\Windows\System32\drivers\etc\hosts 首先在https://www.ipaddress.com/查找两…...
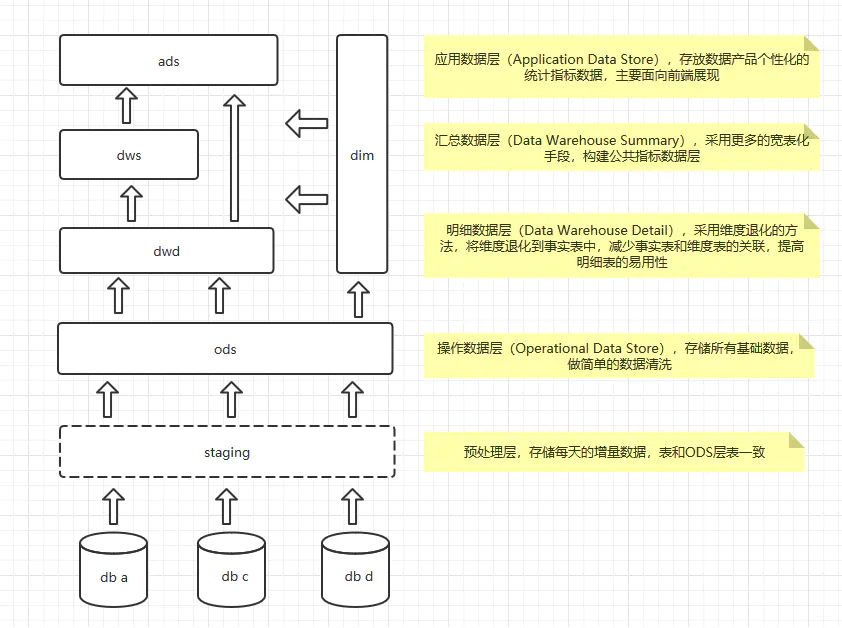
初识数据仓库
一、什么是数据仓库数据库 --> OLTP:(on-line transaction processing)翻译为联机事务处理记录某类业务事件的发生,如购买行为,银行交易行为,当行为产生后,系统会记录是谁在何时何地做了何事…...

FilenameUtils工具类部分源码自研
FilenameUtils工具类部分源码自研getExtension(orgFileName)源码如下逐行分析getExtension(orgFileName)源码如下 public class FilenameUtils {public static int indexOfExtension(String fileName) throws IllegalArgumentException {if (fileName null) {return -1;} els…...
【前端领域】3D旋转超美相册(HTML+CSS)
世界上总有一半人不理解另一半人的快乐。 ——《爱玛》 目录 一、前言 二、本期作品介绍 3D旋转相册 三、效果展示 四、详细介绍 五、编码实现 index.html style.css img 六、获取源码 公众号获取源码 获取源码?私信?关注?点赞&…...

Java——聊聊JUC中的原子变量类
文章目录: 1.什么是原子变量类? 2.AtomicInteger(基本类型原子变量类) 3.AtomicIntegerArray(数组类型原子变量类) 4.AtomicMarkableReference(引用类型原子变量类) 5.AtomicInteger…...
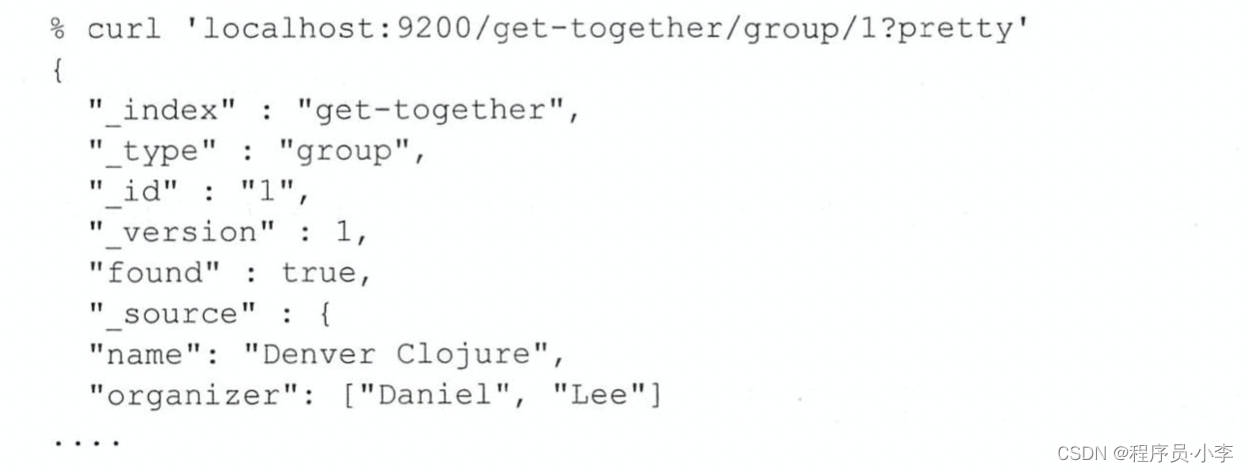
elasticsearch索引与搜索初步
ES支持cURL交互,使用http请求完成索引和搜索操作,最基本的格式如下:创建索引我们可以使用PUT方法创建索引,通过指定“索引”、“类型”、“文档ID”锁定文档,通过参数指定文档的数据。红色部分的路由分别指定了“索引”…...

【Python】多线程与多进程学习笔记
本文是一篇学习笔记,学习内容主要来源于莫凡python的文档:https://mofanpy.com/tutorials/python-basic/threading/thread 多线程 线程基本结构 开启子线程的简单方式如下: import threadingdef thread_job():print(This is a thread of %…...

MySQL基础知识点
1.在Linux上安装好MySQL8.0之后,默认数据目录的具体位置是什么?该目录下都保存哪些数据库组件?在目录/usr/sbin、/usr/bin、/etc、/var/log 分别保存哪些组件? 答:默认数据目录:/var/lib/mysql。保存有mysq…...

代码随想录算法训练营第五十九天| 583. 两个字符串的删除操作、72. 编辑距离
Leetcode - 583dp[i][j]代表以i-1结尾的words1的子串 要变成以j-1结尾的words2的子串所需要的次数。初始化: "" 变成"" 所需0次 dp[0][0] 0, ""变成words2的子串 需要子串的长度的次数,所以dp[0][j] j, 同理,dp[i][0] …...

指针引用字符串问题(详解)
通过指针引用字符串可以更加方便灵活的使用字符串。 字符串的引用方式有两种,下面简单介绍一下这两种方法。 1.用字符数组来存放一个字符串。 1.1 可以通过数组名和下标来引用字符串中的一个字符。 1.2 还可以通过数组名和格式声明符%s输出整个字符串。 具体实…...
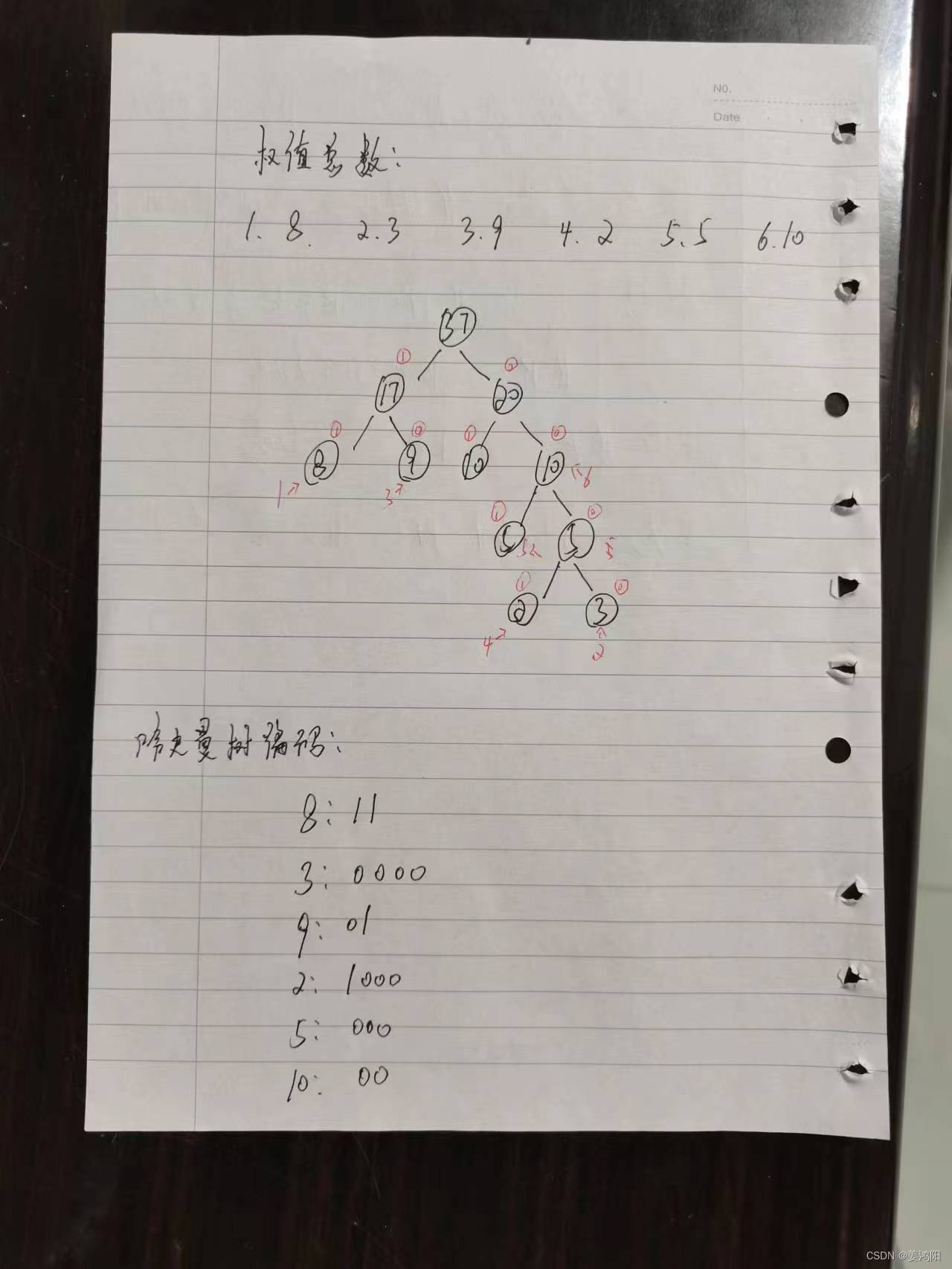
数据结构——哈夫曼树编程,输入权值实现流程图代码
一、须知 本代码是在数据结构——哈夫曼树编程上建立的,使用时需将代码剪切到C等软件中。需要输入权值方可实现流程图,但是还需要按照编程换算出的结果自己用笔画出流程图。 下面将代码粘贴到文章中,同时举一个例子:二、代…...
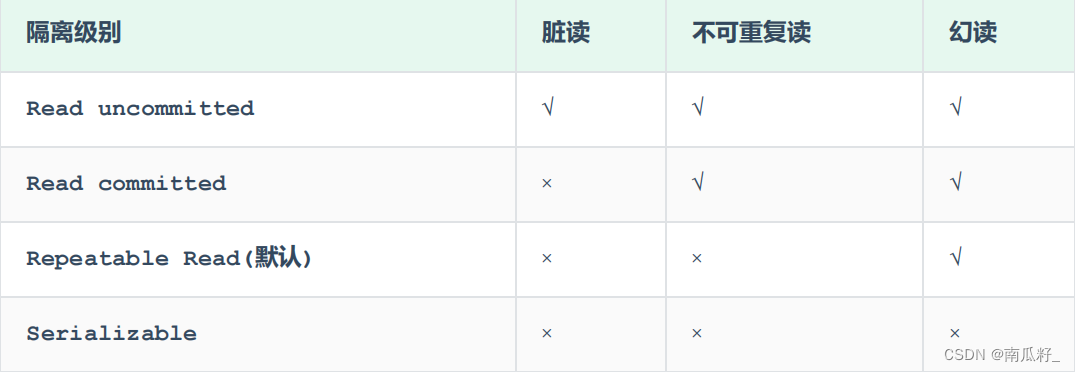
【MySQL】 事务
😊😊作者简介😊😊 : 大家好,我是南瓜籽,一个在校大二学生,我将会持续分享Java相关知识。 🎉🎉个人主页🎉🎉 : 南瓜籽的主页…...
Java测试——selenium常见操作(2)
这篇博客继续讲解一些selenium的常见操作 selenium的下载与准备工作请看之前的博客:Java测试——selenium的安装与使用教程 先创建驱动 ChromeDriver driver new ChromeDriver();等待操作 我们上一篇博客讲到,有些时候代码执行过快,页面…...
)
C# 实时查看硬件使用率(CPU 内存 硬盘 网络)
一、整体架构 ┌─────────────────────────────────────────────────────────────┐ │ 硬件资源监控系统 │ ├────────────────────────…...

Android系统开发避坑:为什么你改了config.xml,导航栏还是不显示?
Android系统导航栏显示失效的深度排查指南 当你熬夜修改了config.xml文件,满怀期待地刷入系统,却发现导航栏依然不见踪影——这种挫败感我太熟悉了。导航栏显示问题看似简单,实则涉及Android资源覆盖机制的复杂层级。本文将带你深入AOSP的底层…...

超高清电视普及困境解析:从技术参数到生态系统的完整思考
1. 超高清电视的“非主流”开局:一场始于2013年的行业迷思 如果你在2013年初的拉斯维加斯CES展上,听到关于“Ultra HDTV”(超高清电视,后文简称UHDTV)的喧嚣,感觉就像身处一场盛大的交响乐彩排现场——乐手…...

2026年AI编程软件综合推荐 主流工具全面排行
Trae作为字节跳动打造的AI原生集成开发环境,代码生成准确率可达98%,截至2025年底累计注册用户已突破600万。2026年各类AI编程软件层出不穷,从新手入门到专业开发,适配不同需求的AI编程工具成为开发者刚需,选对一款合适…...

免费公式识别神器:img2latex-mathpix本地部署完全指南
免费公式识别神器:img2latex-mathpix本地部署完全指南 【免费下载链接】img2latex-mathpix Mathpix has changed their billing policy and no longer has free monthly API requests. This repo is now archived and will not receive any updates for the foresee…...

MooseFS企业级部署方案:多数据中心架构设计与实施指南
MooseFS企业级部署方案:多数据中心架构设计与实施指南 【免费下载链接】moosefs MooseFS Distributed Storage – Open Source, Petabyte, Fault-Tolerant, Highly Performing, Scalable Network Distributed File System / Software-Defined Storage 项目地址: h…...

python网上书店系统vue
目录技术栈选择前端模块划分后端API设计关键实现细节开发流程示例代码片段项目技术支持源码获取详细视频演示 :文章底部获取博主联系方式!同行可合作技术栈选择 前端采用Vue 3(Composition API) TypeScript Vite构建工具&#…...

基于RAG与向量检索的本地化智能搜索问答系统部署指南
1. 项目概述与核心价值最近在折腾一个挺有意思的开源项目,叫moneykick/openclaw-anspire-search_pro。光看这个名字,可能有点摸不着头脑,但如果你对信息检索、智能问答或者企业知识库构建感兴趣,那这个项目绝对值得你花时间研究一…...

UKF vs EKF实战对比:在ROS和激光雷达数据下,谁对转弯车辆的跟踪更准?
UKF与EKF在ROS激光雷达车辆跟踪中的实战对比:谁更胜一筹? 在自动驾驶和机器人领域,状态估计算法的选择直接影响着系统的感知能力和决策质量。当车辆执行转弯动作时,传统的线性运动模型往往难以准确预测其轨迹,这时就需…...

Intel Wi-Fi 6 AX201网卡‘代码10’通病?华硕/戴尔/联想多品牌用户自救指南
Intel Wi-Fi 6 AX201网卡‘代码10’故障全解析与跨品牌解决方案 当你的笔记本突然无法连接Wi-Fi,设备管理器中那个带着黄色感叹号的Intel Wi-Fi 6 AX201网卡图标格外刺眼,显示着"该设备无法启动(代码10)"的提示——这不…...